Машина для добычи корней солодкиПатент на изобретение №: 2125785 Автор: Салдаев А.М., Колганов А.В., Бородычев В.В. Патентообладатель: Салдаев Александр Макарович, Колганов Александр Васильевич, Бородычев Виктор Владимирович Дата публикации: 10 Февраля, 1999 Адрес для переписки: 400059 ГСП Волгоград, ул.Изоляторная 2-89, Салдаеву А.М. Изображения 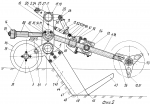 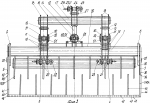 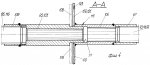 Изобретение представлено для сельскохозяйственного машиностроения и может быть использовано для уборки корней растений, например солодки. Машина для добычи корней солодки содержит раму 1, подрезающий и извлекающий рабочие органы 7, 10. Смонтированный на дополнительной раме 11 извлекающий рабочий орган 7 выполнен в виде ротора с радиально направленными клыками 51. Ротор кинематически связан с редуктором 93 привода замкнутым контуром силовой передачи, который снабжен механизмом 95 силового нагружения кинематической цепи и торсионным валом 94, размещенными на выходных концах ведомого вала 98 редуктора 93. Применение изобретения позволит снизить энергоемкость процесса и повысить производительность. 3 з.п.ф-лы. 8 ил. Изобретение относится к сельскохозяйственному машиностроению, в частности к машинам для уборки корней растений, залегающих на значительной глубине, например солодки. Известна машина для уборки корней растений, содержащая раму, подкапывающий и извлекающий рабочий органы (SU, 904548, кл. 6 A 01 D 25/02, 1982). Недостатками данной машины являются сложность конструкции, низкая производительность и низкая степень очистки добываемых корней. Наиболее близким изобретением к предложенному является машина для добычи корней солодки, содержащая раму, подрезающий и извлекающий рабочие органы (SU 1824049, кл. A 01 C 11/00, 1993). Недостатком данного изобретения являются высокие энергозатраты на выполнение технологического процесса и низкая степень извлечения корней. Задачей изобретения является повышение качества добываемых корней и степени их извлечения. Поставленная задача достигается тем, что смонтированный на дополнительной раме извлекающий рабочий орган выполнен в виде ротора с радиально направленными клыками, при этом ротор кинематически связан с редуктором привода замкнутым контуром силовой передачи, который снабжен механизмом силового нагружения кинематической цепи и торсионным валом, размещенными на выходных концах ведомого вала редуктора. На фиг. 1 изображена машина для добычи корней солодки, вид в плане; на фиг. 2 - то же, вид слева; на фиг. 3 - то же, вид спереди; на фиг. 4 - сечение А-А на фиг. 1, диаметральный разрез механизма силового нагружения; на фиг. 5 - сечение Б-Б на фиг. 1, поперечный разрез сопрягаемых валов механизма нагружения и взаимное положение ведомых и ведущих упоров; на фиг. 6 - кинематическая схема привода извлекающего рабочего органа; на фиг. 7 - сечение В-В на фиг. 1, диаметральный разрез торсионного вала; на фиг. 8 - сечение Г-Г на фиг. 1, поперечный разрез торсионного вала привода извлекающего рабочего органа. Машина для добычи корней солодки (см. фиг. 1-3) содержит раму 1, кронштейны навески 2, 3 и 4, дисковый нож левый 5 (по ходу движения), дисковый нож правый 6, подрезающий рабочий орган 7, левый кронштейн 8, правый кронштейн 9, извлекающий рабочий орган 10, дополнительную раму 11, гидропривод 12 дополнительной рамы 11, талреп 13 и привод 14 извлекающего рабочего органа 10. Рама 1 машины для добычи корней солодки содержит несущий элемент из толстостенной трубы, левой 15, правой 16 стоек 16 и верхней балки 17. Левая стойка 15 идентична по конструкции с правой стойкой 16. Стойки 15 и 16 образованы из боковин 18 соответствующей геометрии и дистанционных стержней 19. Боковины 18 выполнены из листовой стали соответствующего раскроя толщиной 6 мм. В боковинах 18 выполнены отверстия соответствующего диаметра под размер проточенных концов дистанционных стержней 19, несущего элемента рамы 1 и верхней балки 17. Боковины 18 со стержнями 19, с несущим элементом рамы 1 и с верхней балкой 17 соединены замкнутыми сварными швами. В нижних частях пар боковин 18 стоек 15 и 16 в сквозных отверстиях сварными швами закреплены втулки 20 и 21. Втулки 20 и 21 в парах боковин 18 стоек 15 и 16 образуют кронштейны 3 и 4 для соединения пальцами 22 и 23 нижних продольных тяг навесной системы агрегатируемого трактора. Пальцы 22 и 23 выполнены с номинальным диаметром, равным 35 мм. Расстояние между вертикальными осями симметрии стоек 15 и 16 равно 900  1 мм. В средней части верхней балки 17 размещен кронштейн 2 навески рамы 1 машины. Кронштейн 2 выполнен из двух щек 24 толщиной 6 мм, втулок 25 для установки верхнего пальца 26, дистанционного стержня 27 и пары соосных втулок 28 для установки оси 29 гидропривода 12. Щеки 24 сварными швами соединены с верхней балкой 17. Диаметр пальца 26 равен 30 мм. Щеки 24 технологическими отверстиями охватывают поверхность верхней балки 17. Втулки 25 и 28 сварными швами соединены с боковыми поверхностями щек 24 верхнего кронштейна 2. На удаленных концах несущего элемента рамы 1 кольцевыми сварными швами посредством технологических отверстий закреплены левый кронштейн 8 и правый кронштейн 9 для установки левого дискового ножа 5, правого дискового ножа 6 и подрезающего рабочего органа 7. Несущий элемент рамы 1 представлен трубой с толщиной стенки, равной 6 мм, и внешним диаметром 200 мм. Торцы трубы закрыты заглушками в виде дисков толщиной 4 мм и замкнутыми кольцевыми швами. Верхняя балка 17 выполнена из трубы с толщиной стенки, равной 4 мм и с внешним диаметром 120 мм. Описанная конструкция рамы 1 образует пространственную форму сварной конструкции массой 113,7 кг. На боковинах 18 в средней части стоек 15 и 16 в технологических отверстиях смонтированы пары соосных втулок 30 и 31 для шарнирной установки дополнительной рамы 11 извлекающего рабочего органа 10. Дополнительная рама 11 установлена шарнирно в соосных втулках 30 и 31 посредством полых осей 32. Оси 32 в парах втулок 30 и 31 зафиксированы стопорными планками 33 и парами болтов 34. Левый и правый дисковые ножи 5 и 6 установлены на левом и правом кронштейнах 8 и 9 посредством осей 35, пар закрытых шарикоподшипников разовой смазки и ступиц 36. Положение осей 35 в ступицах 36 зафиксировано корончатыми гайками 37. Толщина дисков ножей 5 и 6 равна 6 мм. Диаметр дисков равен 600 мм. Периферийная часть дисковых ножей 5 и 6 снабжена замкнутыми режущими кромками 38 односторонних лезвий 39. Угол заточки лезвия 38 выполнен равным 15... 18o. Лезвия 39 дисковых ножей 5 и 6 закалены токами высокой частоты на глубину 0,8...1,5 мм до твердости 45...50 НРСэ. Подрезающий рабочий орган 7 (фиг. 1-3) содержит левую боковину 40, правую боковину 41 и горизонтальный нож 42. На горизонтальном ноже 42 с заданным шагом закреплены наклонные подъемники 43. Фронтальные участки боковин 40, 41 и горизонтального ножа 42 снабжены режущими кромками 44, 45 и 46 односторонних лезвий 47, 48 и 49. Угол заточки лезвий 47-49 выполнен равным 23...25o. Нижняя поверхность горизонтального ножа 42 и поверхности, обращенные наружу, на левой боковине 40 и на правой боковине 41, начиная от режущих кромок 44-46, имеют полосы, напыленные износостойким материалом. Полоса напыления имеет ширину 60 мм и толщину покрытия в пределах 0,8...1,3 мм. Твердость покрытия напыления - 60...65 НРСэ. Наклонные подъемники 43 смещены на 65 мм назад по отношению к режущей кромке 46. Это обеспечивает плавное смещение корневой массы с подрезанным пластом почвы в направлении извлекающего рабочего органа 10. Угол наклона подъемника 43 к горизонту не должен превышать 43...47o. Режущие кромки 44 и 45 боковин 40 и 41 наклонены к направлению движения машины под углом 60...65o. В верхней части боковин 40 и 41 выполнены монтажные отверстия диаметром 31 мм. Отверстия предусмотрены для крепления болтами подрезающего рабочего органа 7 на левом кронштейне 8 и правом кронштейне 9 рамы 1. Извлекающий рабочий орган 10 (см. фиг. 1-3) представлен в виде вращающегося ротора и выполнен в виде полой составной трубы 50 с радиально направленными клыками 51. Клыки 51 на поверхности трубы 50 размещены с шагом, равным шагу расстановки наклонных подъемников 43 на горизонтальном ноже 42. Диаметр описанной окружности по концам клыков 51 равен 630 мм. Толщина клыков 51 не превышает 12 мм. Количество клыков 51 в одной продольно-вертикальной плоскости - три. Частота вращения ротора 320 об/мин. В трубах 50 размещены пары фланцев и цапфы 52. Цапфы 52 установлены в сферических двухрядных самоустанавливающихся подшипниковых опорах 53 и 54 (см. фиг. 6). Подшипниковые опоры 53 и 54 смонтированы в телескопических балках 55 и 56 рамы 11 ротора. Рама 11 ротора (см. фиг. 1-3) извлекающего рабочего органа 10 выполнена H-образной формы из двух продольных труб 57 и 58 диаметром 100 мм и толщиной стенок 4 мм и поперечного полого квадратного бруса 59 сечением 120х120х8 мм. В брусе 59 выполнены три отверстия. Два сквозных отверстия на концах бруса 59 с номинальным отверстием 100 мм предусмотрены для установки продольных труб 57 и 58. Третье отверстие предусмотрено для установки трубы 60 с внешним диаметром 80 мм (см. фиг.6). Поперечный полый квадратный брус 59 с продольными трубами 57, 58 и 60 соединен парами кольцевых замкнутых сварных швов в местах их взаимного сопряжения. Передние концы продольных труб 57 и 58 снабжены соосными втулками 61, посредством которых и полых осей 32 рама 11 ротора извлекающего рабочего органа 10 соединена с парами втулок 30 и 31 в стойках 15 и 16 рамы 1 машины. Сопряжение поперечного полого квадратного бруса 59 с продольными трубами 58 и 57 усилено косынками 62 и 63 (см. фиг. 1). В продольных трубах 57 и 58 установлены соосные пары гнезд 64 и 65, в которых размещены пары роликоподшипников, глухих и сквозных крышек и сальниковых уплотнений ведущих валов 66 и 67 первой многорядной цепной передачи 68 и второй многорядной цепной передачи 69 привода ротора. На ведущих валах 66 и 67 установлены ведущие звездочки 70 и 71 цепных передач 68 и 69. Ведомые звездочки 72 и 73 установлены на правой и левой цапфах 52 ротора дополнительной рамы 11. На задних концах продольных труб 57 и 58 установлены натяжные устройства 74 и 75 цепных передач 68 и 69 (см. фиг. 1 и 6). Натяжные устройства 74 и 75 содержат U-образные кронштейны 76, резьбовые штоки 77, гайку 78 и контргайку 79. Каждый резьбовой шток 77 снабжен полусферической головкой 80. Полу сферические головки 80 сопряжены с T-образными упорами 81. Упоры 81 закреплены на концах телескопических балок 55 и 56 (см. фиг.1). Натяжение ветвей цепных передач 68 и 69 производится при перемещении телескопических балок 55 и 56 полусферическими головками 80 резьбовых штоков 77 натяжных устройств 74 и 75 через T-образные упоры 81. Гидропривод 12 дополнительной рамы 11 (см. фиг. 1-3) представлен силовым цилиндром ЦС-75 двустороннего действия. Основание силового цилиндра ДС-75 с ходом штока 82 в 250 мм шарнирно соединено осью 29 с соосными втулками 28 кронштейна 2. Шток 82 силового цилиндра ЦС-75 связан пальцем 83 и кронштейном 84 поперечного полого квадратного бруса 59. Гидропривод 12 на раме 1 установлен в поперечно-вертикальной плоскости симметрии. Гидропривод 12 обеспечивает перевод дополнительной рамы 11 из рабочего положения в транспортное и обратно без разрыва потока мощности в приводе ротора извлекающего рабочего органа 10. Талреп 13 (фиг. 1 и 2) связывает дополнительную раму 11 с рамой 1 и ограничивает нижнее положение клыков 51 по отношению к верхним концам наклонных подъемников 43 подрезающего рабочего органа 7. Резьбовой шток 85 талрепа 13 посредством оси 86 соединен с кронштейнами 87, установленными на левом конце полого квадратного бруса 59 дополнительной рамы 11. Подвижный шток 88 талрепа 13 установлен на дистанционном стержне 19 левой стойки 15 рамы 1 машины. Подвижный шток 88 талрепа 13 обеспечивает беспрепятственный подъем дополнительной рамы 11 в транспортное положение. Привод 14 извлекающего рабочего органа 10 (см. фиг. 1-3 и 6) содержит карданный вал 89 с двумя шарнирами Гука 90 и 91 по концам, соединительный вал 92, установленный в полости трубы 60 поперечной балки 59, конический редуктор 93, торсионный вал 94, ведущий вал 67 левой многорядной цепной передачи 68, ведущую звездочку 70 и ведомую звездочку 72 на левой цапфе ротора извлекающего рабочего органа 10, механизм 95 силового нагружения замкнутой кинематической цепи привода рабочего органа 10, ведущий вал 66 правой многорядной цепной передачи 69, ведущую звездочку 71 и ведомую звездочку 73, смонтированную на правой цапфе ротора извлекающего рабочего органа 10. Левая 68 и правая 69 многорядные цепные передачи 69 размещены в полостях продольных левой и правой полых труб 58 и 57 дополнительной рамы 11. Сопрягаемые поверхности передних концов телескопических балок 55 и 56 и внутренних поверхностей задних концов продольных труб 58 и 57 снабжены уплотнениями, исключающими попадание пыли и грязи в полости балок 55 и 56 и продольных труб 58 и 57. Цепные передачи 68 и 69 работают в масляных ваннах, образуемых замкнутыми пространствами пар: труба 58 - балка 56, труба 57 - балка 55. В средней части труб 57 и 58 выполнены заливные горловины 96 и 97 (см. фиг.1). На нижних торцевых концах телескопических балок 55 и 56 смонтированы сливные резьбовые пробки. Торсионный вал 94 (см. фиг. 1, 6-8) установлен на левой цапфе 98 ведомого вала 99 конического редуктора 93 и на правой цапфе 100 ведущего вала 67 привода левой многорядной цепной передачи 68. Левая цапфа 99 ведомого вала 98 и правая цапфа 100 ведущего вала 67 выполнены шлицевыми. Торсионный вал 94 содержит шлицевые втулки 101 и 102 и пакет упругих элементов 103 из полосовой углеродистой стали. Концы упругих элементов 103 размещены в радиальных пазах втулок 101 и 102 и соединены с ними тавровыми швами электросварки. Торсионный вал 94 на шлицевых цапфах 99 и 100 установлен без крепежных элементов и имеет возможность смещения вдоль геометрической оси ведомого вала 99 редуктора 93. Механизм 95 силового нагружения замкнутой кинематической цепи привода извлекающего рабочего органа 10 (см. фиг. 1, 4-6) содержит две сопрягаемые соосные втулки 104 и 105, шлицевые концы 106 и 107, ведомые и ведущие радиально направленные две пары упоров 108 и 109, резьбовые втулки 110 и 111, штоки 112 и 113 и контргайки 114. Втулка 105 с правой стороны снабжена шлицевым концом 106. Левый конец втулки 105 имеет посадочный поясок 115. На пояске 115 в радиальных направлениях размещены пары упоров 108 и с ним соединены сварными швами. Шлицевой конец 106 втулки 105 установлен на шлицевой цапфе 116 ведущего вала 66 правой многорядной цепной передачи 69 привода ротора извлекающего рабочего органа 10. Правый конец втулки 104 имеет внутреннюю обработанную поверхность 117, которая сопряжена с пояском 115 левого конца втулки 105. На внешней поверхности правого конца втулки 104 сварными швами закреплена пара радиально направленных упоров 109. Левый конец втулки 104 снабжен шлицевым концом 107, который установлен на шлицевой цапфе 118 ведомого вала 99 конического редуктора 93. Ведущая звездочка 70 и цапфа 100 ее вала 67, смонтированные в правой продольной трубе 58 дополнительной рамы, связаны со второй выходной шлицевой цапфой 116 конического редуктора 93 посредством механизма 95 силового нагружения кинематической цепи. На боковых гранях упоров 108 сварными швами закреплены резьбовые втулки 110 и 111. В резьбовых втулках 110 и 111 смонтированы штоки 112 и 113. Один из концов штока 112 (113) снабжен полу сферической головкой 119, а другой конец - квадратным хвостовиком 120 под размер рожкового ключа. На штоках 112 и 113 навинчены контргайки 114. На гранях 121 и 122 упоров 109 выполнены углубления 123 и 124. Полусферические головки 119 штоков 112 и 113 сопряжены с углублениями 123 и 124. Ведущий вал 125 конического редуктора 93 имеет шлицевую часть 126, которая сопряжена с шлицевой втулкой соединительного вала 92 (см. фиг. 6). Передний конец вала 92 установлен в трубе 60 посредством радиального самоустанавливающегося шарикоподшипника 127 разовой смазки. Вал 92 снабжен предохранительным срезным штифтом. Замкнутый контур силовой передачи в приводе извлекающего рабочего органа 10 образован ведомым валом 99 конического редуктора 93, торсионным валом 94, ведущим валом 67 и звездочкой 70 многорядной цепной передачи 68, ее ведомой звездочкой 72, левой цапфы 73 правой многорядной цепной передачи 69, ведущей звездочки 71 и ведущего вала 66 и механизмом 95 силового нагружения контура. Перед началом работы машину готовят для навески на тяги навесной системы агрегатируемого трактора, редуктор ВОМ, его муфту и рычаг включения, проверяют техническое состояние рабочих органов, узлов привода и приводят соответствующие технические и технологические регулировки. Рассмотрим пример агрегатирования машины для добычи корней солодки с трактором класса 3,0 тс Харьковского тракторного завода колесной модификации Т-150К. Машину с площадки хранения или с машинного двора погрузочными средствами размещают на технологическую площадку, подготовленную с удобствами для проведения регулировочных и ремонтных работ. Агрегатируемый трактор подают задним ходом к кронштейнам навески 2, 3 и 4 рамы 1. Пальцы 22, 23 и 26 извлекают из отверстий пар втулок 20, 21 и 25 кронштейнов навески 2, 3 и 4. Сферические шарниры нижних продольных тяг навесной системы трактора Т-150К размещают между парами втулок 20 и 21 кронштейнов 2 и 3. Откидные стопоры пальцев 22 и 23 ориентируют вдоль осей пальцев 22 и 23 и вводят их поочередно во втулки 20, 21 и сферические шарниры нижних тяг навески трактора. При полностью задвинутых пальцах 22 и 23 откидные стопоры поворачивают на 90o вокруг их осей, а пальцы смещают в обратном направлении, переместив их ручками. При соединении верхней тяги навесной системы трактора, сначала освобождают стопорные болты на стяжной гайке, во втулках которой нарезаны, соответственно, левая и правая резьбы. Удаленный конец верхней тяги со сферическим шарниром вводят между соосными втулками 25 на щеках 24 верхнего кронштейна навески 2 рамы 1 машины. При соосном положении сферического шарнира и втулок 25 в их отверстия последовательно вводят откидной стопор пальца 26 и сам палец. Далее стопор откидывают, а палец смещают ручкой в обратном направлении. Откидной стопор пальца 26 плотно прижат к одной из втулок 25. Тракторист затягивает стопорные болты на стяжной гайке верхней тяги. Далее, управляя средней ручкой гидрозолотника гидрораспределителя трактора, силовым цилиндром навески трактора механизатор раму 1 переводит в транспортное и исходное положения. Тяги навесной системы трактора должны соответствовать положению трехточечной схемы навески. При полностью поднятой раме 1 машины блокировочные цепи нижних продольных тяг навесной системы трактора размещают крест на крест и винтовыми парами убирают провисание. Удаленные концы клыков 51 извлекающего рабочего органа 10 не должны свободно перемещаться от продольно-вертикальной плоскости симметрии более чем на 20 мм. Раму 1 машины навеской трактора возвращают в исходное положение. Далее механизатор через гидравлическую муфту включает редуктор ВОМ агрегатируемого трактора. При номинальных оборотах двигателя трактора тахометром проверяют частоту вращения шлицевого хвостовика редуктора ВОМ трактора. Номинальное число оборотов ВОМ трактора должно быть для работы машины 1020 об/мин (17 с-1). При несоответствии чисел оборотов ВОМ к указанной частоте в редукторе ВОМ переставляют шестерни в новое положение, предварительно сняв редуктор с заднего моста трактора. С универсального шарнира 91 демонтируют крепежный (чистый) болт М14. Затем проверяют положение одноименных вилок на универсальных шарнирах 90 и 91 телескопического шлицевого карданного вала 89. Затем шарнир Гука 91 соединяют с шлицевым хвостовиком выходного вала ВОМ трактора. Крепежный болт устанавливают в отверстие втулки шарнира Гука 91 и в кольцевую проточку хвостовика ВОМ и соответствующим образом блокируют самопроизвольное отвинчивание корончатой гайки М14. ВОМ трактора выключен до момента выполнения всех регулировок в приводе извлекающего рабочего органа 10. Затем тракторист рукавом высокого давления соединяет штоковую полость силового цилиндра 12 механизма подъема дополнительной рамы 11. На второй штуцер силового цилиндра 12 навинчивают сапун с фильтром, исключающие попадание пыли в бесштоковую полость силового цилиндра 12. Свободный конец рукава высокого давления соединяют с разрывной муфтой гидросистемы трактора таким образом, чтобы она была гидравлически связана с правой ручкой гидрозолотника трактора и соответствовала положению "Подъем". Далее переводом правой ручки гидрозолотника добиваются, чтобы дополнительная рама 11 извлекающего рабочего органа 10 плавно переводилась в транспортное и рабочее положения. Далее приступают к выполнению следующих регулировок. Для этого шток 82 силового цилиндра гидропривода 12 выдвигают полностью из гильзы цилиндра. Вращая рукой, клыки 51 подводят к удаленным концам наклонных подъемников 43. Зазор между периферийными кромками клыков 51 и концов подъемников 43 не должен превышать 40 - 50 мм. При величине зазора меньше 40 мм резьбовую гайку стяжной гайки талрепа 13 навинчивают на резьбовой шток 85. Далее гидроприводом 12 дополнительную раму 11 переводят в полное транспортное положение. При переводе правой ручкой гидрозолотника в положение "Плавающее" рама 11 ротора извлекающего рабочего органа 10 на соосных осях 32 поворачивается во втулках 30. При величине зазора больше 50 мм свинчиванием гайки талрепа 13 с резьбового штока 85 увеличивают длину талрепа 13 и тем самым подводят клыки 51 извлекающего рабочего органа 10 к концам наклонных подъемников 43. Затем приступают к регулировкам натяжения ветвей многорядных цепных передач 68 и 69 (см. фиг. 1 и 6). Для этого с резьбовых штоков 77 натяжных устройств 74 и 75 свинчивают гайки 78 и контргайки 79. Гидроприводом 12 продольные трубы 57 и 58 дополнительной рамы 11 устанавливают в горизонтальное положение. Усилием руки подшипниковые опоры 53 и 54 в телескопических балках 55 и 56 смещают назад. Металлической линейкой с ценой деления 1 мм измеряют расстояния между T-образными упорами 81 и вертикальными полками U-образных кронштейнов 76. Далее полусферические головки 80 резьбовых штоков 77 подводят к упорам 81. Гайки 78 навинчивают до плоскостей кронштейнов 76. Контргайки 79 отводят от вертикальных полок U-образных кронштейнов 76 свинчиванием на один оборот контргаек 79. Гайками 78 на штоках 77 смещают цапфы 52 ротора извлекающего рабочего органа 10 на 1 - 1,5 мм. Штангенциркулем с ценой деления 0,1 мм измеряют расстояние между кронштейнами 76 и упорами 81. Разница в двух измерениях для левой и правой цапф ротора не должна превышать величины 0,1 мм. Контргайками 79 фиксируют положение резьбовых штоков 77 натяжных устройств 74 и 75 в U-образных кронштейнах 76. После этого приступают к ревизии технического состояния торсионного вала 94 и его свободному смещению на шлицевых цапфах левой цапфы 99 ведомого вала 98 конического редуктора 93 и на шлицах правой цапфы 100 ведущего вала 67 левой многорядной цепной передачи 68. Усилием руки, приложенной на пакет упругих элементов 103, торсионный вал 94 должен смещаться вдоль цапф 99 и 100 на 10 - 12 мм. В коническом редукторе 93 проверяют зазор в зацеплении пар ведомой и ведущей конических шестерен. Величина зазора не должна превышать 0,13 - 0,18 мм. Этот зазор регулируется металлическими прокладками, установленными между корпусом редуктора 93 и стаканом с роликоподшипниками ведущего вала 125. Прокладками между корпусами и сквозными крышками ведомого вала 97 устраняют люфты в роликоподшипниках. Затем приступают к выполнению завершающей регулировки механизма 95 силового нагружения замкнутой кинематической цепи привода извлекающего рабочего органа 10. Для этого контргайки 114 свинчивают со штоков 112 и 113. Шток 112 ввинчивают за квадратный хвостовик 120 в полость втулки 110. Полусферическая головка 119 упирается в углубление 123 ведущего клыка 109. При дальнейшем ввинчивании резьбового штока 112 во втулку 110 ведущий кулак 109 смещается от ведомого кулака 108 на угол 1 мм. В средней части верхней балки 17 размещен кронштейн 2 навески рамы 1 машины. Кронштейн 2 выполнен из двух щек 24 толщиной 6 мм, втулок 25 для установки верхнего пальца 26, дистанционного стержня 27 и пары соосных втулок 28 для установки оси 29 гидропривода 12. Щеки 24 сварными швами соединены с верхней балкой 17. Диаметр пальца 26 равен 30 мм. Щеки 24 технологическими отверстиями охватывают поверхность верхней балки 17. Втулки 25 и 28 сварными швами соединены с боковыми поверхностями щек 24 верхнего кронштейна 2. На удаленных концах несущего элемента рамы 1 кольцевыми сварными швами посредством технологических отверстий закреплены левый кронштейн 8 и правый кронштейн 9 для установки левого дискового ножа 5, правого дискового ножа 6 и подрезающего рабочего органа 7. Несущий элемент рамы 1 представлен трубой с толщиной стенки, равной 6 мм, и внешним диаметром 200 мм. Торцы трубы закрыты заглушками в виде дисков толщиной 4 мм и замкнутыми кольцевыми швами. Верхняя балка 17 выполнена из трубы с толщиной стенки, равной 4 мм и с внешним диаметром 120 мм. Описанная конструкция рамы 1 образует пространственную форму сварной конструкции массой 113,7 кг. На боковинах 18 в средней части стоек 15 и 16 в технологических отверстиях смонтированы пары соосных втулок 30 и 31 для шарнирной установки дополнительной рамы 11 извлекающего рабочего органа 10. Дополнительная рама 11 установлена шарнирно в соосных втулках 30 и 31 посредством полых осей 32. Оси 32 в парах втулок 30 и 31 зафиксированы стопорными планками 33 и парами болтов 34. Левый и правый дисковые ножи 5 и 6 установлены на левом и правом кронштейнах 8 и 9 посредством осей 35, пар закрытых шарикоподшипников разовой смазки и ступиц 36. Положение осей 35 в ступицах 36 зафиксировано корончатыми гайками 37. Толщина дисков ножей 5 и 6 равна 6 мм. Диаметр дисков равен 600 мм. Периферийная часть дисковых ножей 5 и 6 снабжена замкнутыми режущими кромками 38 односторонних лезвий 39. Угол заточки лезвия 38 выполнен равным 15... 18o. Лезвия 39 дисковых ножей 5 и 6 закалены токами высокой частоты на глубину 0,8...1,5 мм до твердости 45...50 НРСэ. Подрезающий рабочий орган 7 (фиг. 1-3) содержит левую боковину 40, правую боковину 41 и горизонтальный нож 42. На горизонтальном ноже 42 с заданным шагом закреплены наклонные подъемники 43. Фронтальные участки боковин 40, 41 и горизонтального ножа 42 снабжены режущими кромками 44, 45 и 46 односторонних лезвий 47, 48 и 49. Угол заточки лезвий 47-49 выполнен равным 23...25o. Нижняя поверхность горизонтального ножа 42 и поверхности, обращенные наружу, на левой боковине 40 и на правой боковине 41, начиная от режущих кромок 44-46, имеют полосы, напыленные износостойким материалом. Полоса напыления имеет ширину 60 мм и толщину покрытия в пределах 0,8...1,3 мм. Твердость покрытия напыления - 60...65 НРСэ. Наклонные подъемники 43 смещены на 65 мм назад по отношению к режущей кромке 46. Это обеспечивает плавное смещение корневой массы с подрезанным пластом почвы в направлении извлекающего рабочего органа 10. Угол наклона подъемника 43 к горизонту не должен превышать 43...47o. Режущие кромки 44 и 45 боковин 40 и 41 наклонены к направлению движения машины под углом 60...65o. В верхней части боковин 40 и 41 выполнены монтажные отверстия диаметром 31 мм. Отверстия предусмотрены для крепления болтами подрезающего рабочего органа 7 на левом кронштейне 8 и правом кронштейне 9 рамы 1. Извлекающий рабочий орган 10 (см. фиг. 1-3) представлен в виде вращающегося ротора и выполнен в виде полой составной трубы 50 с радиально направленными клыками 51. Клыки 51 на поверхности трубы 50 размещены с шагом, равным шагу расстановки наклонных подъемников 43 на горизонтальном ноже 42. Диаметр описанной окружности по концам клыков 51 равен 630 мм. Толщина клыков 51 не превышает 12 мм. Количество клыков 51 в одной продольно-вертикальной плоскости - три. Частота вращения ротора 320 об/мин. В трубах 50 размещены пары фланцев и цапфы 52. Цапфы 52 установлены в сферических двухрядных самоустанавливающихся подшипниковых опорах 53 и 54 (см. фиг. 6). Подшипниковые опоры 53 и 54 смонтированы в телескопических балках 55 и 56 рамы 11 ротора. Рама 11 ротора (см. фиг. 1-3) извлекающего рабочего органа 10 выполнена H-образной формы из двух продольных труб 57 и 58 диаметром 100 мм и толщиной стенок 4 мм и поперечного полого квадратного бруса 59 сечением 120х120х8 мм. В брусе 59 выполнены три отверстия. Два сквозных отверстия на концах бруса 59 с номинальным отверстием 100 мм предусмотрены для установки продольных труб 57 и 58. Третье отверстие предусмотрено для установки трубы 60 с внешним диаметром 80 мм (см. фиг.6). Поперечный полый квадратный брус 59 с продольными трубами 57, 58 и 60 соединен парами кольцевых замкнутых сварных швов в местах их взаимного сопряжения. Передние концы продольных труб 57 и 58 снабжены соосными втулками 61, посредством которых и полых осей 32 рама 11 ротора извлекающего рабочего органа 10 соединена с парами втулок 30 и 31 в стойках 15 и 16 рамы 1 машины. Сопряжение поперечного полого квадратного бруса 59 с продольными трубами 58 и 57 усилено косынками 62 и 63 (см. фиг. 1). В продольных трубах 57 и 58 установлены соосные пары гнезд 64 и 65, в которых размещены пары роликоподшипников, глухих и сквозных крышек и сальниковых уплотнений ведущих валов 66 и 67 первой многорядной цепной передачи 68 и второй многорядной цепной передачи 69 привода ротора. На ведущих валах 66 и 67 установлены ведущие звездочки 70 и 71 цепных передач 68 и 69. Ведомые звездочки 72 и 73 установлены на правой и левой цапфах 52 ротора дополнительной рамы 11. На задних концах продольных труб 57 и 58 установлены натяжные устройства 74 и 75 цепных передач 68 и 69 (см. фиг. 1 и 6). Натяжные устройства 74 и 75 содержат U-образные кронштейны 76, резьбовые штоки 77, гайку 78 и контргайку 79. Каждый резьбовой шток 77 снабжен полусферической головкой 80. Полу сферические головки 80 сопряжены с T-образными упорами 81. Упоры 81 закреплены на концах телескопических балок 55 и 56 (см. фиг.1). Натяжение ветвей цепных передач 68 и 69 производится при перемещении телескопических балок 55 и 56 полусферическими головками 80 резьбовых штоков 77 натяжных устройств 74 и 75 через T-образные упоры 81. Гидропривод 12 дополнительной рамы 11 (см. фиг. 1-3) представлен силовым цилиндром ЦС-75 двустороннего действия. Основание силового цилиндра ДС-75 с ходом штока 82 в 250 мм шарнирно соединено осью 29 с соосными втулками 28 кронштейна 2. Шток 82 силового цилиндра ЦС-75 связан пальцем 83 и кронштейном 84 поперечного полого квадратного бруса 59. Гидропривод 12 на раме 1 установлен в поперечно-вертикальной плоскости симметрии. Гидропривод 12 обеспечивает перевод дополнительной рамы 11 из рабочего положения в транспортное и обратно без разрыва потока мощности в приводе ротора извлекающего рабочего органа 10. Талреп 13 (фиг. 1 и 2) связывает дополнительную раму 11 с рамой 1 и ограничивает нижнее положение клыков 51 по отношению к верхним концам наклонных подъемников 43 подрезающего рабочего органа 7. Резьбовой шток 85 талрепа 13 посредством оси 86 соединен с кронштейнами 87, установленными на левом конце полого квадратного бруса 59 дополнительной рамы 11. Подвижный шток 88 талрепа 13 установлен на дистанционном стержне 19 левой стойки 15 рамы 1 машины. Подвижный шток 88 талрепа 13 обеспечивает беспрепятственный подъем дополнительной рамы 11 в транспортное положение. Привод 14 извлекающего рабочего органа 10 (см. фиг. 1-3 и 6) содержит карданный вал 89 с двумя шарнирами Гука 90 и 91 по концам, соединительный вал 92, установленный в полости трубы 60 поперечной балки 59, конический редуктор 93, торсионный вал 94, ведущий вал 67 левой многорядной цепной передачи 68, ведущую звездочку 70 и ведомую звездочку 72 на левой цапфе ротора извлекающего рабочего органа 10, механизм 95 силового нагружения замкнутой кинематической цепи привода рабочего органа 10, ведущий вал 66 правой многорядной цепной передачи 69, ведущую звездочку 71 и ведомую звездочку 73, смонтированную на правой цапфе ротора извлекающего рабочего органа 10. Левая 68 и правая 69 многорядные цепные передачи 69 размещены в полостях продольных левой и правой полых труб 58 и 57 дополнительной рамы 11. Сопрягаемые поверхности передних концов телескопических балок 55 и 56 и внутренних поверхностей задних концов продольных труб 58 и 57 снабжены уплотнениями, исключающими попадание пыли и грязи в полости балок 55 и 56 и продольных труб 58 и 57. Цепные передачи 68 и 69 работают в масляных ваннах, образуемых замкнутыми пространствами пар: труба 58 - балка 56, труба 57 - балка 55. В средней части труб 57 и 58 выполнены заливные горловины 96 и 97 (см. фиг.1). На нижних торцевых концах телескопических балок 55 и 56 смонтированы сливные резьбовые пробки. Торсионный вал 94 (см. фиг. 1, 6-8) установлен на левой цапфе 98 ведомого вала 99 конического редуктора 93 и на правой цапфе 100 ведущего вала 67 привода левой многорядной цепной передачи 68. Левая цапфа 99 ведомого вала 98 и правая цапфа 100 ведущего вала 67 выполнены шлицевыми. Торсионный вал 94 содержит шлицевые втулки 101 и 102 и пакет упругих элементов 103 из полосовой углеродистой стали. Концы упругих элементов 103 размещены в радиальных пазах втулок 101 и 102 и соединены с ними тавровыми швами электросварки. Торсионный вал 94 на шлицевых цапфах 99 и 100 установлен без крепежных элементов и имеет возможность смещения вдоль геометрической оси ведомого вала 99 редуктора 93. Механизм 95 силового нагружения замкнутой кинематической цепи привода извлекающего рабочего органа 10 (см. фиг. 1, 4-6) содержит две сопрягаемые соосные втулки 104 и 105, шлицевые концы 106 и 107, ведомые и ведущие радиально направленные две пары упоров 108 и 109, резьбовые втулки 110 и 111, штоки 112 и 113 и контргайки 114. Втулка 105 с правой стороны снабжена шлицевым концом 106. Левый конец втулки 105 имеет посадочный поясок 115. На пояске 115 в радиальных направлениях размещены пары упоров 108 и с ним соединены сварными швами. Шлицевой конец 106 втулки 105 установлен на шлицевой цапфе 116 ведущего вала 66 правой многорядной цепной передачи 69 привода ротора извлекающего рабочего органа 10. Правый конец втулки 104 имеет внутреннюю обработанную поверхность 117, которая сопряжена с пояском 115 левого конца втулки 105. На внешней поверхности правого конца втулки 104 сварными швами закреплена пара радиально направленных упоров 109. Левый конец втулки 104 снабжен шлицевым концом 107, который установлен на шлицевой цапфе 118 ведомого вала 99 конического редуктора 93. Ведущая звездочка 70 и цапфа 100 ее вала 67, смонтированные в правой продольной трубе 58 дополнительной рамы, связаны со второй выходной шлицевой цапфой 116 конического редуктора 93 посредством механизма 95 силового нагружения кинематической цепи. На боковых гранях упоров 108 сварными швами закреплены резьбовые втулки 110 и 111. В резьбовых втулках 110 и 111 смонтированы штоки 112 и 113. Один из концов штока 112 (113) снабжен полу сферической головкой 119, а другой конец - квадратным хвостовиком 120 под размер рожкового ключа. На штоках 112 и 113 навинчены контргайки 114. На гранях 121 и 122 упоров 109 выполнены углубления 123 и 124. Полусферические головки 119 штоков 112 и 113 сопряжены с углублениями 123 и 124. Ведущий вал 125 конического редуктора 93 имеет шлицевую часть 126, которая сопряжена с шлицевой втулкой соединительного вала 92 (см. фиг. 6). Передний конец вала 92 установлен в трубе 60 посредством радиального самоустанавливающегося шарикоподшипника 127 разовой смазки. Вал 92 снабжен предохранительным срезным штифтом. Замкнутый контур силовой передачи в приводе извлекающего рабочего органа 10 образован ведомым валом 99 конического редуктора 93, торсионным валом 94, ведущим валом 67 и звездочкой 70 многорядной цепной передачи 68, ее ведомой звездочкой 72, левой цапфы 73 правой многорядной цепной передачи 69, ведущей звездочки 71 и ведущего вала 66 и механизмом 95 силового нагружения контура. Перед началом работы машину готовят для навески на тяги навесной системы агрегатируемого трактора, редуктор ВОМ, его муфту и рычаг включения, проверяют техническое состояние рабочих органов, узлов привода и приводят соответствующие технические и технологические регулировки. Рассмотрим пример агрегатирования машины для добычи корней солодки с трактором класса 3,0 тс Харьковского тракторного завода колесной модификации Т-150К. Машину с площадки хранения или с машинного двора погрузочными средствами размещают на технологическую площадку, подготовленную с удобствами для проведения регулировочных и ремонтных работ. Агрегатируемый трактор подают задним ходом к кронштейнам навески 2, 3 и 4 рамы 1. Пальцы 22, 23 и 26 извлекают из отверстий пар втулок 20, 21 и 25 кронштейнов навески 2, 3 и 4. Сферические шарниры нижних продольных тяг навесной системы трактора Т-150К размещают между парами втулок 20 и 21 кронштейнов 2 и 3. Откидные стопоры пальцев 22 и 23 ориентируют вдоль осей пальцев 22 и 23 и вводят их поочередно во втулки 20, 21 и сферические шарниры нижних тяг навески трактора. При полностью задвинутых пальцах 22 и 23 откидные стопоры поворачивают на 90o вокруг их осей, а пальцы смещают в обратном направлении, переместив их ручками. При соединении верхней тяги навесной системы трактора, сначала освобождают стопорные болты на стяжной гайке, во втулках которой нарезаны, соответственно, левая и правая резьбы. Удаленный конец верхней тяги со сферическим шарниром вводят между соосными втулками 25 на щеках 24 верхнего кронштейна навески 2 рамы 1 машины. При соосном положении сферического шарнира и втулок 25 в их отверстия последовательно вводят откидной стопор пальца 26 и сам палец. Далее стопор откидывают, а палец смещают ручкой в обратном направлении. Откидной стопор пальца 26 плотно прижат к одной из втулок 25. Тракторист затягивает стопорные болты на стяжной гайке верхней тяги. Далее, управляя средней ручкой гидрозолотника гидрораспределителя трактора, силовым цилиндром навески трактора механизатор раму 1 переводит в транспортное и исходное положения. Тяги навесной системы трактора должны соответствовать положению трехточечной схемы навески. При полностью поднятой раме 1 машины блокировочные цепи нижних продольных тяг навесной системы трактора размещают крест на крест и винтовыми парами убирают провисание. Удаленные концы клыков 51 извлекающего рабочего органа 10 не должны свободно перемещаться от продольно-вертикальной плоскости симметрии более чем на 20 мм. Раму 1 машины навеской трактора возвращают в исходное положение. Далее механизатор через гидравлическую муфту включает редуктор ВОМ агрегатируемого трактора. При номинальных оборотах двигателя трактора тахометром проверяют частоту вращения шлицевого хвостовика редуктора ВОМ трактора. Номинальное число оборотов ВОМ трактора должно быть для работы машины 1020 об/мин (17 с-1). При несоответствии чисел оборотов ВОМ к указанной частоте в редукторе ВОМ переставляют шестерни в новое положение, предварительно сняв редуктор с заднего моста трактора. С универсального шарнира 91 демонтируют крепежный (чистый) болт М14. Затем проверяют положение одноименных вилок на универсальных шарнирах 90 и 91 телескопического шлицевого карданного вала 89. Затем шарнир Гука 91 соединяют с шлицевым хвостовиком выходного вала ВОМ трактора. Крепежный болт устанавливают в отверстие втулки шарнира Гука 91 и в кольцевую проточку хвостовика ВОМ и соответствующим образом блокируют самопроизвольное отвинчивание корончатой гайки М14. ВОМ трактора выключен до момента выполнения всех регулировок в приводе извлекающего рабочего органа 10. Затем тракторист рукавом высокого давления соединяет штоковую полость силового цилиндра 12 механизма подъема дополнительной рамы 11. На второй штуцер силового цилиндра 12 навинчивают сапун с фильтром, исключающие попадание пыли в бесштоковую полость силового цилиндра 12. Свободный конец рукава высокого давления соединяют с разрывной муфтой гидросистемы трактора таким образом, чтобы она была гидравлически связана с правой ручкой гидрозолотника трактора и соответствовала положению "Подъем". Далее переводом правой ручки гидрозолотника добиваются, чтобы дополнительная рама 11 извлекающего рабочего органа 10 плавно переводилась в транспортное и рабочее положения. Далее приступают к выполнению следующих регулировок. Для этого шток 82 силового цилиндра гидропривода 12 выдвигают полностью из гильзы цилиндра. Вращая рукой, клыки 51 подводят к удаленным концам наклонных подъемников 43. Зазор между периферийными кромками клыков 51 и концов подъемников 43 не должен превышать 40 - 50 мм. При величине зазора меньше 40 мм резьбовую гайку стяжной гайки талрепа 13 навинчивают на резьбовой шток 85. Далее гидроприводом 12 дополнительную раму 11 переводят в полное транспортное положение. При переводе правой ручкой гидрозолотника в положение "Плавающее" рама 11 ротора извлекающего рабочего органа 10 на соосных осях 32 поворачивается во втулках 30. При величине зазора больше 50 мм свинчиванием гайки талрепа 13 с резьбового штока 85 увеличивают длину талрепа 13 и тем самым подводят клыки 51 извлекающего рабочего органа 10 к концам наклонных подъемников 43. Затем приступают к регулировкам натяжения ветвей многорядных цепных передач 68 и 69 (см. фиг. 1 и 6). Для этого с резьбовых штоков 77 натяжных устройств 74 и 75 свинчивают гайки 78 и контргайки 79. Гидроприводом 12 продольные трубы 57 и 58 дополнительной рамы 11 устанавливают в горизонтальное положение. Усилием руки подшипниковые опоры 53 и 54 в телескопических балках 55 и 56 смещают назад. Металлической линейкой с ценой деления 1 мм измеряют расстояния между T-образными упорами 81 и вертикальными полками U-образных кронштейнов 76. Далее полусферические головки 80 резьбовых штоков 77 подводят к упорам 81. Гайки 78 навинчивают до плоскостей кронштейнов 76. Контргайки 79 отводят от вертикальных полок U-образных кронштейнов 76 свинчиванием на один оборот контргаек 79. Гайками 78 на штоках 77 смещают цапфы 52 ротора извлекающего рабочего органа 10 на 1 - 1,5 мм. Штангенциркулем с ценой деления 0,1 мм измеряют расстояние между кронштейнами 76 и упорами 81. Разница в двух измерениях для левой и правой цапф ротора не должна превышать величины 0,1 мм. Контргайками 79 фиксируют положение резьбовых штоков 77 натяжных устройств 74 и 75 в U-образных кронштейнах 76. После этого приступают к ревизии технического состояния торсионного вала 94 и его свободному смещению на шлицевых цапфах левой цапфы 99 ведомого вала 98 конического редуктора 93 и на шлицах правой цапфы 100 ведущего вала 67 левой многорядной цепной передачи 68. Усилием руки, приложенной на пакет упругих элементов 103, торсионный вал 94 должен смещаться вдоль цапф 99 и 100 на 10 - 12 мм. В коническом редукторе 93 проверяют зазор в зацеплении пар ведомой и ведущей конических шестерен. Величина зазора не должна превышать 0,13 - 0,18 мм. Этот зазор регулируется металлическими прокладками, установленными между корпусом редуктора 93 и стаканом с роликоподшипниками ведущего вала 125. Прокладками между корпусами и сквозными крышками ведомого вала 97 устраняют люфты в роликоподшипниках. Затем приступают к выполнению завершающей регулировки механизма 95 силового нагружения замкнутой кинематической цепи привода извлекающего рабочего органа 10. Для этого контргайки 114 свинчивают со штоков 112 и 113. Шток 112 ввинчивают за квадратный хвостовик 120 в полость втулки 110. Полусферическая головка 119 упирается в углубление 123 ведущего клыка 109. При дальнейшем ввинчивании резьбового штока 112 во втулку 110 ведущий кулак 109 смещается от ведомого кулака 108 на угол  (см. фиг. 5). Штангенциркулем замеряют зазор между полусферической головкой 119 резьбовой втулки 111 и углублением 124 на ведущем кулаке 109. При повороте ведомой втулки 105 в посадочном отверстии обработанной поверхности 117 ведущей втулки 104 упругие элементы 103 деформируются скручиванием каждого элемента вдоль оси торсионного вала 94. Таким образом без включения ВОМ агрегатируемого трактора во всех парах и сопряжениях замкнутой кинематической цепи выбираются люфты и зазоры, а обе ведущие ветви левой и правой многорядных цепных передач 68 и 69 равномерно передают крутящий момент на цапфы 52 ротора извлекающего рабочего органа 10. Завершение регулировок механизма 95 достигается тем, что шток 113 полусферической головкой 119 подводят к выемке 124 на ведущем клыке 109. Затем фиксируют положение штоков 112 и 113 в резьбовых втулках 110 и 111 контргайками 114. Режим работы торсионного вала 94 зависит от величины угла (см. фиг. 5). Штангенциркулем замеряют зазор между полусферической головкой 119 резьбовой втулки 111 и углублением 124 на ведущем кулаке 109. При повороте ведомой втулки 105 в посадочном отверстии обработанной поверхности 117 ведущей втулки 104 упругие элементы 103 деформируются скручиванием каждого элемента вдоль оси торсионного вала 94. Таким образом без включения ВОМ агрегатируемого трактора во всех парах и сопряжениях замкнутой кинематической цепи выбираются люфты и зазоры, а обе ведущие ветви левой и правой многорядных цепных передач 68 и 69 равномерно передают крутящий момент на цапфы 52 ротора извлекающего рабочего органа 10. Завершение регулировок механизма 95 достигается тем, что шток 113 полусферической головкой 119 подводят к выемке 124 на ведущем клыке 109. Затем фиксируют положение штоков 112 и 113 в резьбовых втулках 110 и 111 контргайками 114. Режим работы торсионного вала 94 зависит от величины угла  (см. фиг. 5). Затем тракторист проверяет легкость вращения в подшипниковых опорах осей 35 в ступицах 36 дисковых ножей 5 и 6, состояние лезвий 39 и режущих кромок 38, а также их совпадения с внешними поверхностями левой боковины 40 и правой боковины 41. Проверяют состояние лезвия 49 и режущей кромки 46 горизонтального ножа 42 и режущих кромок 44 и 45 лезвий 47 и 48 боковин 40 и 41. Тракторист включает ВОМ агрегатируемого трактора на холостых оборотах двигателя и проверяет вращение всех узлов привода извлекающего рабочего органа 10 - ротора. Устраняются все шумы и стуки. Далее при горизонтальном положении дополнительной рамы 11 через заливные пробки 96 и 97 в полых продольных трубах 58 и 57 рамы 1 заливают до 1,5 л трансмиссионной смазки для смазки шарниров в ветвях многорядных втулочно-роликовых цепей 68 и 69 или приводной зубчатой цепи. Заполнение масла в полостях продольных труб 58 и 57 проверяют по уровню контрольных пробок в телескопических балках 55 и 56. Эту же операцию проводят в редукторе 93. В полевых условиях выполняют одну регулировку - изменением длины верхней тяги навески трактора добиваются вертикального положения стоек 15 и 16 рамы 1. Это соответствует горизонтальному положению подрезающего ножа 42. Для этого раму 1 машины опускают на поверхность поля или участка. Трактор на первой передаче проезжает 8 - 10 м. Подрезающий рабочий орган 7 занимает рабочее положение. Затем отвесом проверяют положение геометрических центров балки несущего элемента рамы 1 и верхней балки 17. Изменением длины верхней тяги (стяжной гайкой) добиваются требуемых результатов. Машина работает следующим образом. На естественных солодковых зарослях скашивают перед добычей корней надземные побеги, которые сразу же убирают. Стерню надземных побегов и растительного покрова в солодково-злаковых ассоциациях и верхний почвенный слой для удаления карабаша солодки фрезеруют на глубину 1,5 - 3,5 см. По следу движения фрезерного агрегата движется трактор Т-150К и машина для добычи корней солодки в рабочем положении. При движении трактора режущие кромки 38 дисковых ножей 5 и 6 в почве разрезают вертикально пласт почвы. Вертикальные срезы шириной 6 мм смещены друг от друга на расстояние 1780 мм, равное абрису трактора Т-150К по ширине. Срезы дисковыми ножами 5 и 6 выполнены на глубине 120 - 150 мм. Отклонения по глубине подрезания вызваны только пьезо- и микронеровностями рельефа на убираемом участке. Размещенные в створе дисковых ножей 5 и 6 режущие кромки 44 и 45 наклонных боковин 40 и 41 подрезающего рабочего органа 7 увеличивают вертикальные срезы на глубину 30 - 33 см. Режущая кромка 46 лезвия 49 горизонтального ножа 42 подрезает почвенный пласт с естественным заложением генетических горизонтов и насыщенный переплетенными корнями и корневищами солодки. Подрезанный пласт за счет подпора смещается к наклонным подъемникам 43 и ими приподнимается над открытой канавой на высоту 25...28 см. Подрезанный пласт почвы с корнями солодки перемещается к радиально направленным клыкам 51 извлекающего рабочего органа 10. Поднятый над канавой пласт почвы клыками 51 подвергается высокочастотным ударным воздействием. Из пласта почвы в первую очередь отделяются нижние почвенные генетические горизонты с тем же расположением, что и на соседних необработанных участках и укладываются на дно канавы. Многократные удары клыков 51 рабочего органа 10 по пласту почвы снизу вверх приводят к тому, что корни и корневища солодки поднимаются вверх и извлекаются на поверхность, а комья почвы остаются в канаве. Геометрия клыков 51 обеспечивает полное извлечение корней и корневищ и их укладку на обработанную полосу. Длина горизонтальных корней варьирует от 1,8 м до 3,6 м. Длина вертикальных корневищ изменяется в пределах 0,3...0,7 м. Ударные нагрузки на клыки 51 компенсируются деформацией пакета упругих элементов 103 торсионного вала 94. Равномерность вращения ротора извлекающего рабочего органа 10 обеспечивает высокое качество очистки корней солодки от почвы их извлечение из подрезанного слоя. (см. фиг. 5). Затем тракторист проверяет легкость вращения в подшипниковых опорах осей 35 в ступицах 36 дисковых ножей 5 и 6, состояние лезвий 39 и режущих кромок 38, а также их совпадения с внешними поверхностями левой боковины 40 и правой боковины 41. Проверяют состояние лезвия 49 и режущей кромки 46 горизонтального ножа 42 и режущих кромок 44 и 45 лезвий 47 и 48 боковин 40 и 41. Тракторист включает ВОМ агрегатируемого трактора на холостых оборотах двигателя и проверяет вращение всех узлов привода извлекающего рабочего органа 10 - ротора. Устраняются все шумы и стуки. Далее при горизонтальном положении дополнительной рамы 11 через заливные пробки 96 и 97 в полых продольных трубах 58 и 57 рамы 1 заливают до 1,5 л трансмиссионной смазки для смазки шарниров в ветвях многорядных втулочно-роликовых цепей 68 и 69 или приводной зубчатой цепи. Заполнение масла в полостях продольных труб 58 и 57 проверяют по уровню контрольных пробок в телескопических балках 55 и 56. Эту же операцию проводят в редукторе 93. В полевых условиях выполняют одну регулировку - изменением длины верхней тяги навески трактора добиваются вертикального положения стоек 15 и 16 рамы 1. Это соответствует горизонтальному положению подрезающего ножа 42. Для этого раму 1 машины опускают на поверхность поля или участка. Трактор на первой передаче проезжает 8 - 10 м. Подрезающий рабочий орган 7 занимает рабочее положение. Затем отвесом проверяют положение геометрических центров балки несущего элемента рамы 1 и верхней балки 17. Изменением длины верхней тяги (стяжной гайкой) добиваются требуемых результатов. Машина работает следующим образом. На естественных солодковых зарослях скашивают перед добычей корней надземные побеги, которые сразу же убирают. Стерню надземных побегов и растительного покрова в солодково-злаковых ассоциациях и верхний почвенный слой для удаления карабаша солодки фрезеруют на глубину 1,5 - 3,5 см. По следу движения фрезерного агрегата движется трактор Т-150К и машина для добычи корней солодки в рабочем положении. При движении трактора режущие кромки 38 дисковых ножей 5 и 6 в почве разрезают вертикально пласт почвы. Вертикальные срезы шириной 6 мм смещены друг от друга на расстояние 1780 мм, равное абрису трактора Т-150К по ширине. Срезы дисковыми ножами 5 и 6 выполнены на глубине 120 - 150 мм. Отклонения по глубине подрезания вызваны только пьезо- и микронеровностями рельефа на убираемом участке. Размещенные в створе дисковых ножей 5 и 6 режущие кромки 44 и 45 наклонных боковин 40 и 41 подрезающего рабочего органа 7 увеличивают вертикальные срезы на глубину 30 - 33 см. Режущая кромка 46 лезвия 49 горизонтального ножа 42 подрезает почвенный пласт с естественным заложением генетических горизонтов и насыщенный переплетенными корнями и корневищами солодки. Подрезанный пласт за счет подпора смещается к наклонным подъемникам 43 и ими приподнимается над открытой канавой на высоту 25...28 см. Подрезанный пласт почвы с корнями солодки перемещается к радиально направленным клыкам 51 извлекающего рабочего органа 10. Поднятый над канавой пласт почвы клыками 51 подвергается высокочастотным ударным воздействием. Из пласта почвы в первую очередь отделяются нижние почвенные генетические горизонты с тем же расположением, что и на соседних необработанных участках и укладываются на дно канавы. Многократные удары клыков 51 рабочего органа 10 по пласту почвы снизу вверх приводят к тому, что корни и корневища солодки поднимаются вверх и извлекаются на поверхность, а комья почвы остаются в канаве. Геометрия клыков 51 обеспечивает полное извлечение корней и корневищ и их укладку на обработанную полосу. Длина горизонтальных корней варьирует от 1,8 м до 3,6 м. Длина вертикальных корневищ изменяется в пределах 0,3...0,7 м. Ударные нагрузки на клыки 51 компенсируются деформацией пакета упругих элементов 103 торсионного вала 94. Равномерность вращения ротора извлекающего рабочего органа 10 обеспечивает высокое качество очистки корней солодки от почвы их извлечение из подрезанного слоя.
Формула изобретения1. Машина для добычи корней солодки, содержащая раму, подрезающий и извлекающий рабочие органы, отличающаяся тем, что смонтированный на дополнительной раме извлекающий рабочий орган выполнен в виде ротора с радиально направленными клыками, при этом ротор кинематически связан с редуктором привода замкнутым контуром силовой передачи, который снабжен механизмом силового нагружения кинематической цепи и торсионным валом, размещенными на выходных концах ведомого вала редуктора. 2. Машина по п.1, отличающаяся тем, что замкнутый контур силовой передачи привода ротора извлекающего рабочего органа выполнен в виде конического редуктора, ведущий вал которого соединен карданным телескопическим валом с валом отбора мощности агрегатируемого трактора, а ведомый вал редуктора снабжен двумя выходными шлицевыми цапфами, одна из которых соединена с валом ведущей звездочки многорядной цепной передачи, смонтированной в левой продольной трубе дополнительной рамы, при этом кинематическая цепь связана ведомыми звездочками на левой и правой цапфах ротора, а ведомая звездочка на правой цапфе соединена ветвями замкнутой многорядной цепной передачи, ведущая звездочка и цапфа ее вала, смонтированные в правой продольной трубе дополнительной рамы, связаны с второй выходной шлицевой цапфой конического редуктора посредством механизма силового нагружения кинематической цепи. 3. Машина по пп.1 и 2, отличающаяся тем, что механизм силового нагружения кинематической цепи привода ротора извлекающего рабочего органа выполнен в виде двух соосных сопрягаемых втулок, одна из которых своим концом охватывает другую, при этом на одной из них в месте взаимного сопряжения размещены ведущие радиально направленные упоры, а на другой втулке - ведомые радиально направленные упоры с обращенными в сторону ведущих упоров резьбовыми втулками и со штоками в них, полусферические головки которых сопряжены с углублениями на лобовых гранях ведущих упоров. 2. Машина по пп.1 и 2, отличающаяся тем, что торсионный вал выполнен в виде пакета радиально направленных пластин, концы которых закреплены в пазах на торцах оппозитно установленных шлицевых втулок.MM4A Досрочное прекращение действия патента Российской Федерации на изобретение из-за неуплаты в установленный срок пошлины за поддержание патента в силе Дата прекращения действия патента: 20.12.1999 Номер и год публикации бюллетеня: 28-2002 Извещение опубликовано: 10.10.2002 Популярные патенты: 2261592 Ферма двухконсольного дождевального агрегата ... трубопроводов.На фиг.4 - сечение Б-Б на фиг.1, сечение центральной крестообразной стойки и центральной панели с водопроводящим трубопроводом.Сведения, подтверждающие возможность реализации заявленного изобретения, заключаются в следующем.Ферма двухконсольного дождевального агрегата включает центральную панель 1 с шарнирно закрепленными на ней двумя консолями 2 и 3. Каждая консоль 2 (3) выполнена в виде пространственной фермы, основу которой составляет водопроводящий пояс 4 (5), набранный из разновеликих по сечению трубопрводов, боковых вертикальных Т-образных стоек 6, 7 и 8, попарно смонтированные на стойках 6-8 гибкие пояса 9, 10 и 11 и пары раскосов 12, 13, 14 и 15. Смежные ... 2278488 Способ создания пастбищных экосистем весенне-летнего срока использования ... на 100% хозяйственную годность семян.При создании поликомпонентных пастбищных ценозов норма высева семян рассчитывается по выше приведенным нормам пропорционально соотношению видов в смеси.Оптимальное соотношение видов растений для пастбища весенне-летнего срока использования устанавливают из соотношения 60...80% полукустарников и 20...40% трав.Описанное соотношение 60...80% полукустарников и 20...40% трав способно к семенному возобновлению за счет опавших на землю семян в полевых условиях и в условиях принятого пастбищного режима. Описанное соотношение позволяет создать пастбище низкорослое. Оно предназначено для животных, в т.ч. и овец. Это соотношение относится к ... 2080774 Способ изготовления брикетов для выращивания растений и устройство для его осуществления ... 7 предназначены для упрощения поворота камеры 1 с материалом 4 относительно матрицы 2. Камера 1 так же может быть выполнена разъемной, т.е. состоять из нескольких частей, которые могут соединяться, например, по указанным выступам с помощью зажимов или защелок /не показано/. В качестве связующего можно применять водо или спирторастворимые клеи, например, КМЦ, бустилат и т.д. В связующее можно добавлять поверхностно-активные вещества, например, поливиниловый спирт для эффективного смачивания частиц земли, а кроме этого удобрения, фунгициды и т.д. Сушка брикета происходит при комнатной температуре. Применение указанной технологии позволит получить с минимальными затратами брикеты ... 2093016 Устройство для водоподачи ... 24, 25. Однако, через некоторый промежуток времени, вступит в работу следующая водозаборная головка 11, 12, 13, т.е. будет происходить совместная работы двух водозаборных головок. При дальнейшем смешении пневмоцилиндров 8, 9, 10 по направляющим полозьям 6 (фиг. 1, 2), против движения опорно-приводной тележки 2 (фиг. 2), щуп подъема 16 (фиг. 1, 2) набежит на контакт 21 сработают датчик управления пневмоцилиндрами 14, водозаборная головка 11, 12, 13 поднимется и выйдет из контакта с гидрантом 24, 25. Для предотвращения вылета воды из напорного трубопровода подводящей сети 26 после выхода водозаборных головок 11, 12, 13, в оголовке 32 (фиг. 4) гидранта 24, 25 (фиг. 1, 2) срабатывает ... 2452157 Рыхлитель-щелерез ... металлического троса 9 с замком 10, хомутами 11 и зубовыми боронками 12 (фиг.4, фиг.5), пальца 13, подшипника 14, вилки 15, ушка 16 и плоскореза-глубокорыхлителя 17.Конструкция устройства рыхлителя-щелереза представляет собой горизонтально расположенную раму 1, сварную из труб прямоугольного сечения с вертикально расположенным спереди треугольником автосцепки 2, верхний конец которого жестко соединен посредством с серединой по продольной оси симметрии концевого поперечного горизонтального бруса рамы 1. Имеет расположенные спереди жестко закрепленные к боковым продольным брусам рамы опорные колеса 3 с механизмом регулирования 4 глубины установки рабочих органов подъемом и опусканием ... |
Еще из этого раздела: 2429594 Палец штампосварной для режущего аппарата (варианты) и способ его изготовления 2056737 Способ диагностики морозоустойчивости плодовых культур 2469534 Перезаряжаемая электронная ловушка для животных с перегородкой, механическим переключателем в конфигурации с множеством поражающих пластин 2065260 Гидравлическая система самоходной сельскохозяйственной машины 2027757 Способ получения растений - регенерантов in vitro 2389173 Способ выращивания земляники садовой 2056743 Установка для выращивания пушных зверей 2245013 Устройство для обмолота легкоповрежденных культур на примере нута (варианты) 2407280 Устройство и способ для осушения воздуха в теплице и теплица 2038763 Регулятор вакуума |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||