Устройство автоматизированного управления многоопорной дождевальной машиной фронтального действияПатент на изобретение №: 2476067 Автор: Карпов Валерий Николаевич (RU), Юлдашев Зарифджан Шарифович (RU), Карпов Николай Валерьевич (RU), Юлдашев Рауф Зарифджанович (RU) Патентообладатель: Федеральное государственное образовательное учреждение высшего профессионального образования "Санкт-Петербугский государственный аграрный университет" (RU), Карпов Валерий Николаевич (RU) Дата публикации: 20 Октября, 2012 Начало действия патента: 11 Апреля, 2011 Адрес для переписки: 196601, Санкт-Петербург-Пушкин, Петербургское ш., 2, СПбГАУ, патентная группа Изображения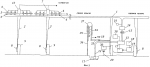 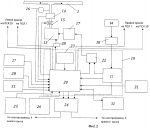 Устройство содержит трубопроводы правого и левого крыльев машины, блок синхронизации движения по курсу и блок управления скоростью движения машины. Трубопроводы правого и левого крыльев машины установлены на тележках с электроприводом. Блок синхронизации движения по курсу содержит направляющий трос. Вдоль оросительного канала на стойках установлена контактная сеть, взаимодействующая с токосъемником. Токосъемник через телескопический механизм закреплен на тележке. Тележка движется по противоположной стороне оросительного канала. Выход токосъемника соединен с входом щита управления. Выход щита управления соединен с входом счетчика электрической энергии. Выходы счетчика электрической энергии соединены с входами контактора, микропроцессорного блока управления и частотного преобразователя. Входы микропроцессорного блока управления соединены с таймером, системой стабилизации курса, системой синхронизации тележек в линию, датчиками пути, задатчиком нормы полива, задатчиком длины участка полива, расходомером и манометром. Манометр установлен на трубопроводе. Выходы микропроцессорного блока управления соединены с электрогидрозадвижкой, частотным преобразователем, контактором, приборами синхронизации тележек в линию и приборами стабилизации курса левого и правого крыла. Выходы микропроцессора блока управления соединены через вакуум-насос с входом насоса. Выход насоса через электрогидрозадвижку и расходомер соединен с трубопроводом. Микропроцессорный блок управления соединен с входом-выходом интерфейсного устройства. Сигнал с выхода частотного преобразователя подается на электропривод левого и правого крыла машины. Выход контактора соединен через электродвигатель с входом насоса. Такая конструкция позволит повысить качество полива и экологичность энерготехнологического процесса полива. 2 ил. Изобретение относится к сельскому хозяйству и направлено на повышение качества полива и более эффективное использование энергии и поливной воды путем согласованного регулирования скорости движения опорных тележек и (как следствие, регулирования) вносимой воды в соответствии с поливной нормой. Известна многоопорная дождевальная машина [А.С. Недостатками данного устройства является следующее. Полив производится только при движении опорной тележки. При постоянном коэффициенте передачи электропривода опорных тележек и постоянном напряжении питания электроприводов опорных тележек слой дождя за один проход будет постоянным. Нет возможности регулирования вносимой нормы полива дождевальной машиной. В качестве энергетической установки используется дизельный двигатель внутреннего сгорания, который имеет низкий КПД. После выполнения технологического процесса полива нет возможности определить площадь полива за время работы машины, например за рабочую смену, фактическую норму полива и расход энергии, энергоемкость полива единицы площади. Наиболее близким по технической сущности к заявляемому является устройство автоматизированного управления многоопорной фронтальной дождевальной машиной [А.С. Недостатками данного устройства являются: при дросселировании поливной воды в трубопроводах соответствующих крыльев процесс образования капель ухудшается, в качестве энергетической установки используется дизельный двигатель внутреннего сгорания, который загрязняет окружающую среду и имеет высокий уровень шума. Преобразование механической энергии энергетической установки в электрическую энергию происходит с большими потерями энергии, что приводит к повышению энергоемкости процесса полива. При движении машины увеличивается время остановок тележек от крайних к центральным тележкам в зависимости от заданной скорости движения. Например, время остановок центральных тележек достигает до 5 минут, при условии равномерного движения крайних тележек (без сигналов коррекции). Это прежде всего связано с сугубо нелинейными характеристиками регуляторов машины (машина принимает периодически от «вогнутого» до «выпуклого» состояния линии положения тележек. На участках поля под крайними тележками, которые находятся в режиме коррекции и под прилегающими к ним тележками, происходит переполив, а под другой крайней тележки и прилегающих тележек происходит недополив, что приводят к снижению урожая и неэффективному расходу оросительной воды, особенно в сжатые летние сроки полива. Переполив приводит к уплотнению и эрозии почвы, что способствует засолению почвы участка полива. После выполнения энерготехнологического процесса полива нет возможности определить площадь полива, фактическую норму полива и расход энергии, энергоемкость полива единицы площади. Задача изобретения - повышение качества полива, снижение энергоемкости процесса и повышение экологичности энерготехнологического процесса полива. Поставленная задача решается за счет того, что устройство автоматизированного управления многоопорной дождевальной машиной фронтального действия, включающее установленные на тележках с электроприводом трубопроводы правого и левого крыльев машины блок синхронизации движения по курсу с направляющим тросом и блок управления скоростью движения машины, вдоль оросительного канала установлена на стойках контактная сеть, взаимодействующая с токосъемником, который через телескопический механизм закреплен на тележке, движущейся по противоположной стороне оросительного канала, при этом выход токосъемника соединен с входом щита управления, выход которого соединен с входом счетчика электрической энергии, выходы которого соединены с входами контактора, микропроцессорного блока управления и частотного преобразователя, входы микропроцессорного блока управления соединены с таймером, системой стабилизации курса, системой синхронизации тележек в линию, датчиками пути, задатчиком нормы полива, задатчиком длины участка полива, расходомером и манометром, установленным на трубопроводе, а выходы микропроцессорного блока управления соединены с электрогидрозадвижкой, частотным преобразователем, контактором, приборами синхронизации тележек в линию и приборами стабилизации курса левого и правого крыла, через вакуум-насос с входом насоса, выход которого через электрогидрозадвижку и расходомер соединен с трубопроводом, при этом микропроцессорный блок управления соединен с входом-выходом интерфейсного устройства, сигнал с выхода частотного преобразователя подается на электропривод левого и правого крыла машины, а выход контактора соединен через электродвигатель с входом насоса. Новые существенные признаки: 1. Вдоль оросительного канала установлена на стойках контактная сеть, которая взаимодействует с токосъемником. Токосъемник подает питание на щит управления при помощи гибкого кабеля (на фигурах на показан). 2. Телескопический механизм закреплен на тележке, которая движется по противоположной стороне оросительного канала. 3. Выход токосъемника соединен с входом щита управления. 4. Выход щита управления соединен с входом счетчика электрической энергии, выходы которого соединены с входами контактора, микропроцессорного блока управления и частотного преобразователя. 5. Входы микропроцессорного блока управления соединены с таймером, системой стабилизации курса, системой синхронизации тележек в линию, датчиками пути, задатчиком нормы полива, задатчиком длины участка полива, счетчиком электрической энергии, расходомером и манометром, установленным на трубопроводе. 6. Выходы микропроцессорного блока управления соединены с электрогидрозадвижкой, частотным преобразователем, контактором, приборами синхронизации тележек в линию и приборами стабилизации курса левого и правого крыла, через вакуум-насос с входом насоса, выход которого через электрогидрозадвижку и расходомер соединен с трубопроводом. 7. Микропроцессорный блок управления соединен с входом-выходом интерфейсного устройства. 8. Сигнал с выхода частотного преобразователя подается на электропривод левого и правого крыла машины, а выход контактора соединен через электродвигатель с входом насоса. Перечисленные новые существенные признаки в совокупности с известными необходимы и достаточны во всех случаях, на которые распространяется испрашиваемый объем правовой охраны. Технический результат достигается. 1. Вдоль оросительного канала установлена на стойках контактная сеть, которая взаимодействует с токосъемником. Размещение контактной сети вдоль оросительного канала позволяет подавать питание на предлагаемое устройство с наименьшими потерями по сравнению с размещением контактной сети вдоль края орошаемого поля, а также по причине того, что на концах трубопровода устанавливаются дождеватели, производящие полив на расстояние до 50 м. Токосъемник подает питание на щит управления (например, при помощи гибкой кабельной линии) (на фигурах на показан). Кожух контактной сети защищает ее от попадания дождя, которая разносится ветром и от прикосновения посторонними лицами. 2. Телескопический механизм закреплен на тележке, которая движется по противоположной стороне оросительного канала. Для компенсации бокового перемещения машины при движении используется телескопический механизм, который позволяет устранять влияния отклонения на надежную работу контактной сети. 3. Выход токосъемника соединен с входом щита управления при помощи гибкого кабеля. 4. Выход щита управления соединен с входом счетчика электрической энергии, выходы которого соединены с входами контактора, микропроцессорного блока управления и частотного преобразователя. В щите управления устанавливается защитная аппаратура (например, автоматический выключатель, предохранители, сигнализация и др.). Для регистрации расхода электрической энергии используется счетчик энергии. 5. Входы микропроцессорного блока управления соединены с таймером, системой стабилизации курса, системой синхронизации тележек в линию, датчиков пути, задатчиком нормы полива, задатчиком длины участка полива, счетчиком электрической энергии, расходомером и манометром, установленным на трубопроводе. При отсутствии аварийных сигналов от систем синхронизации тележек в линию (аварийный выбег(отставание) тележек) и стабилизации курса (аварийное боковое отклонение машины) микропроцессорный блок управления вырабатывает команду на движение в соответствии с заданной нормой полива и заданной длины участка полива. Таймер служит для синхронизации работы элементов устройства. Показания манометра, расходомера, датчиков пути и счетчика энергии регистрируются в микропроцессорном блоке управления. 6. Выходы микропроцессорного блока управления соединены с частотным преобразователем, контактором, приборами синхронизации тележек в линию и приборами стабилизации курса левого и правого крыла, через вакуум-насос с входом насоса, выход которого через электрогидрозадвижку и расходомер соединен с трубопроводом. Микропроцессорный блок управления подает команду на закрытие электрогидрозадвижки, подает питание на вакуум-насос для заливки насоса. После заливки насоса подается питание на электродвигатель насоса и далее открывается задвижка и микропроцессорный блок управления в зависимости от заданной нормы полива подает сигнал на частотный преобразователь, который регулирует напряжение и частоту, подаваемые на электропривод крайних и промежуточных тележек. 7. Для управления предлагаемым устройством микропроцессорный блок управления соединен с входом-выходом интерфейсного устройства. По каналам связи при помощи интерфейсного устройства можно передавать регистрированные параметры и вычисленные показатели энергоэффективности, а также задавать норму полива, длину участка полива и различные алгоритмы управления движением машины. 8. Сигнал с выхода частотного преобразователя подается на электропривод левого и правого крыла машины для регулирования скорости движения. Микропроцессорный блок управления подает команду на контактор для включения электродвигателя в сеть. При этом происходит повышение качества полива, повышение энергоэффективности полива путем замены энергетической установки (двигатель внутреннего сгорания) на электрическую энергию, подводимую при помощи троллерной системы передачи энергии, регулирования скорости движения опорных тележек и, как следствие, регулирование выдаваемой поливной нормы дождевальной машины. Скорость движения крайних ведущих тележек 2 определяется в зависимости от нормы полива, которая легко пересчитывается в слой дождя h*. Слой дождя h* зависит от средней интенсивности дождя Отсюда скорость движения крайних тележек 2 равняется:
Скорость движения промежуточных тележек 3 также регулируется при помощи ЧП 24 с учетом того, что скорость промежуточных тележек 3 на 20% больше скорости движения крайних ведущих тележек 2 (разница скорости в 20% может быть обеспечена различными путями, например, при помощи использования редукторов с разными передаточными числами). Таким образом, крайние ведущие тележки 2 участок, длиной L, могут пройти со скоростью Как видно из выражения, скорость движения обратно пропорциональна среднему слою дождя. При использовании ЧП24 появляется возможность регулирования скорости вращения электропривода 9 и, следовательно, скорости движения тележек. На фиг.1 приведена функциональная схема предлагаемого устройства автоматизированного управления многоопорной дождевальной машиной фронтального действия, на фиг.2 приведена структурная схема предлагаемого устройства. Устройство автоматизированного управления многоопорной дождевальной машиной фронтального действия состоит из трубопровода 1 (длина 787 м), который установлен на двух крайних ведущих тележках 2 и промежуточных тележках 3, которые имеют А-образную форму. Дождеватели 4 через электроуправляемые клапаны 5 и патрубки 6 установлены равномерно по длине трубопровода 1. Электроуправляемые клапаны 5 предназначены для перекрытия воды, поступающей на дождеватели 4 из трубопровода 1 через патрубки 6. Для управления движением на промежуточных тележках 3 установлены приборы синхронизации тележек в линию (ПСЛ) 7, которые вырабатывают команды на движение электропривода 8, который механически связан с колесом 9. При выбеге относительно соседних больше допустимого промежуточные тележки 3 по команде ПСЛ7 останавливаются, а при отставании - начинают двигаться. Группа электроуправляемых клапанов 5 дождевателей 4, которые прилегают с двух сторон к промежуточным тележкам 3, соединена с соответствующими ПСЛ7, и когда ПСЛ7 вырабатывает команду на остановку промежуточных тележек 3, электроуправляемые клапаны 5 включаются и перекрывают воду, которая поступает через дождеватели 4 в поле, а при выработке команды на движение - электроуправляемые клапаны 5 отключаются, и вода поступает на дождеватели 4. На двух крайних ведущих тележках 2 установлены приборы стабилизации курса (ПСК)10, которые вырабатывают команду на движение крайних ведущих тележек 2 в зависимости от отклонения машины от курса движения (боковое отклонение). Группа электроуправляемых клапанов 5 дождевателей 4, которые прилегают с двух сторон к крайним тележкам 2, соединена с соответствующими ПСК10, и когда ПСК 10 вырабатывает команду на остановку крайних ведущих тележек 2, электроуправляемые клапаны 5 включаются и перекрывают воду, которая поступает в поле через дождеватели 4, а при выработке команды на движение - электроуправляемые клапаны 5 отключаются, и вода поступает на дождеватели 4. Алгоритмы движения крайних ведущих тележек 2 могут быть различными, например, при коррекции крайние ведущие тележки 2: останавливаются (полив через дождеватели 4 прекращается), замедляют скорость движения (полив осуществляется через часть дождевателей 4) или корректируемая крайняя ведущая тележка 2 замедляет скорость движения, а другая крайняя ведущая тележка 2 увеличивает скорость движения. Алгоритм работы электроуправляемых клапанов 5 и расход через дождеватели 4, которые прилегают к крайним ведущим тележкам 2, также могут быть различными (например, расход через дождеватели 4 должен быть больше, чем через дождеватели 4, которые прилегают к промежуточным тележкам 3. Крайние ведущие тележки 2 имеют меньшую скорость движения по сравнению с промежуточными тележками 3, которые двигаются в «стоп-старт»-овом режиме. На орошаемом участке поля проложен оросительный канал 11, откуда водозаборное устройство 12 при помощи насоса 13 через расходомер 14 и электрогидрозадвижку 15 подает воду в трубопровод 1. Манометр 16, который установлен в трубопроводе 1, имеет электрический выход и служит для измерения давления воды. Электродвигатель 17 предназначен для привода насоса 13, который подает воду в трубопровод 1. Электродвигатель 17 питается от щита управления (ЩУ) 18, в котором размещена защитная аппаратура, через пульт управления (ПУ) 19. В ПУ19 размещен микропроцессорный блок управления (МБУ)20, счетчик электрической энергии (СЭ) 21, контактор 22 и таймер 23. МБУ20 предназначен для управления движением и процессом полива, хранения результатов регистрации и вычисления показателей энергоэффективности процесса полива. СЭ21 предназначен для измерения расхода электрической энергии. Таймер 23 предназначен для синхронизации работы МБУ20. Трехфазное питание поступает от СЭ21 на контактор (К)22, команда на включение которого поступает от МБУ20. Выход К22 соединен с электродвигателем 17. К22 служит для коммутации электродвигателя 17 в электрическую сеть. Сигнал от МБУ20 поступает на частотный преобразователь (ЧП)24, который преобразует напряжение и частоту сети. При помощи ЧП24 регулируются напряжение и частота подаваемых на электропривода 8 крайних ведущих тележек 2 и промежуточных тележек 3, вследствие чего регулируется скорость вращения электропривода 8 и скорость вращения колес 9, и, следовательно, скорость движения тележек 2, 3. Для обеспечения различных норм полива предназначен задатчик норм полива 25, а при помощи задатчика длины участка полива 26 задается длина участка полива (длина участка полива зависит от длины участка посева сельхозкультуры), выходы которых соединены с МБУ20. Сигнал на остановку машины по состояниям ПСЛ7 (аварийный выбег) формируется в системе синхронизации тележек в линию 27. Система стабилизации курса 28, которая установлена над направляющим тросом 29, имеет устройство стабилизации курса (УСК)30, которая крепится на промежуточной тележке 3 и вырабатывает команду на коррекцию соответствующей крайней ведущей тележки 2, которая поступает на соответствующий ПСК10. На крайних ведущих тележках 2 установлены датчики пути 31, которые измеряют фактический пройденный путь крайними ведущими тележками 2 соответствующего крыла. Для передачи информации по каналам связи (например, норма полива, площадь полива, время полива и др.) и задания настроечных параметров используется интерфейсное устройство 32, которое соединено с МБУ20. Над оросительным каналом 11 на промежуточной тележке 3, которая находится ближе к направляющему тросу 29, установлен на телескопическом механизме 33 токосъемник 34. Телескопический механизм 33 служит для компенсации бокового смещения промежуточной тележки 3 от контактной сети 35. Токосъемник 34 контактно соединен с контактной сетью 35, которая размещена на стойках 36 вдоль оросительного канала 11. Кожух 37, закрепленный на стойках 36, защищает контактную сеть 34 от прямого попадания дождя и служит защитным ограждением от случайного прикосновения оператором или посторонними лицами. Вакуум-насос 38 предназначен для забора воды в насос 13 через водозаборное устройство 12 из оросительного канала 11. Оросительная вода, пройдя через расходомер 14 и электрогидрозадвижку 15, подается в трубопровод 1. Предлагаемое устройство работает следующим образом. В зависимости от вида сельскохозяйственной культуры и влагосодержания почвы на задатчике нормы полива 25 задается норма полива и при помощи задатчика длины участка поля 26 задается длина участка полива. Напряжение питания (например, 380 В, 50 Гц) подается при помощи токосъемника 34 из контактной сети 35 на ЩУ 18. Телескопический механизм 33 соединяет токосъемник 34 с промежуточной тележкой 3, которая компенсирует боковое отклонение. Из ЩУ18 электрическая энергия поступает через СЭ21 на ЧП 24 и К22. Перед началом работы по команде МБУ20 электрогидрозадвижка 15 закрывается и подается питание на вакуум-насос 38. После заливки насоса 13 МБУ20 отключает вакуум-насос 38, включает электродвигатель 17 через К22 и открывает электрогидрозадвижку 15. Оросительная вода подается в трубопровод 1, при этом расходомер 14 измеряет количество воды, израсходованное на полив. Показания расходомера 14 и манометра 15 поступают на МБУ 20. При отсутствии аварийных сигналов, поступающих в МБУ20 от систем синхронизации тележек в линию 27 и системы стабилизации курса 28, вырабатывает команду на движение крайних ведущих тележек 2, со скоростью, которая определяется в зависимости от нормы полива. На задатчике нормы полива 25 и задатчике длины участка полива 26 в зависимости от вида и фазы развития сельхозкультуры задается норма полива, например полив с нормой 300 м3/га, а длина участка полива, например, 250 м (зависит от длины участка посева (площади посева) различных культур на данном поле). В МБУ20 вырабатывается команда на ЧП24. ЧП24 путем регулирования на тележки подает такое напряжение, при котором скорость движения крайних ведущих тележек 2 обеспечивает норму полива 300 м 3/га. На ПСЛ 7 обоих крыльев с МБУ20 поступает напряжение питания (для подключения электропривода 8 и электроуправляемых клапанов 5). ПСЛ 7 промежуточных тележек 3 при отставании его относительно двух соседних вырабатывает команду на включение электропривода 8, которая приводит во вращение колесо 9. Сигналы с датчиков пути 31, которые установлены на крайних ведущих тележках 2, поступают на МБУ20. При выбеге промежуточных тележек 3 на величину больше допустимого относительно соседних тележек ПСЛ 7 подключает группу электроуправляемых клапанов 5 в сеть, и оросительная вода, поступающая из трубопровода 1, прекратит поступать через патрубки 6 и электроуправляемые клапаны 5 в дождеватели 4. При отставании промежуточных тележек 3 по отношению к соседним на величину больше допустимого, ПСЛ7 вырабатывает команду на ее движение, при этом напряжение снимается с группы электроуправляемых клапанов 5, и оросительная вода через дождеватели 4 будет поступать в виде дождевого облака на орошаемое поле. При отклонении предлагаемого устройства от курса (от направляющего троса 29) УСК 30 вырабатывает команду на коррекцию «выбежавшего» крыла (например, левого крыла). В режиме коррекции левого крыла крайняя ведущая тележка 2 останавливается, и полив через дождеватели 4, относящиеся к ней, прекращается. При использовании предлагаемого устройства в качестве источника энергии используется трансформаторная подстанция (например, ТП 10/0,4 кВ), питающая контактную сеть 35. В качестве источника механической энергии для привода насоса 13 используется электродвигатель 17 (например, асинхронный электродвигатель), который имеет КПД В МБУ20 сохраняются регистрированные и вычисленные параметры при энерготехнологическом процессе полива, такие как расход воды на полив, площадь полива, норма полива, длительность полива во времени. Параметры энерготехнологического процесса полива по через ИУ32 и каналам связи могут быть переданы в систему более высшего уровня. По ИУ32 при помощи МБУ20 возможны задания различных алгоритмов управления движением машины. Коэффициент замедления и увеличения скорости может лежать в пределах от 10 до 35% от заданной скорости движения. На основании данных могут быть определены показатели энергоэффективности выполнения при энерготехнологическом процессе полива. При использовании предлагаемого устройства коэффициент эффективного полива достигает до 0,95, что подтверждено экспериментальными исследованиями и путем математического моделирования движения машины на ЭВМ. При выполнении энерготехнологического процесса полива по результатам регистрации параметров машины вычисляются следующие показатели: 1. По показаниям датчиков пути определяется путь So, пройденный центром машины за время полива Т: где S-9(T), S9(Т) - пути, пройденные соответственно крайними левой и правой тележками. 2. Определяется площадь полива с учетом ширины захвата дождем D:
3. Определяется фактический слой дождя hфак:
где R(T) - фактический расход оросительной воды за время Т (показание расходомера). 4. Определяется энергоемкость полива 1 м3 оросительной воды при заданной норме полива: где ЭЭ(Т) - расход электрической энергии (показание счетчика энергии). 5. Определяется энергоемкость полива 1 га площади при заданной норме полива: Приведенный пример расчета показателей энергоэффективности позволяет определять численные значения расхода оросительной воды, энергии, фактический слой дождя, площадь полива и энергоемкость полива. Формула изобретенияУстройство автоматизированного управления многоопорной дождевальной машиной фронтального действия, включающее установленные на тележках с электроприводом трубопроводы правого и левого крыльев машины, блок синхронизации движения по курсу с направляющим тросом и блок управления скоростью движения машины, отличающееся тем, что вдоль оросительного канала установлена на стойках контактная сеть, взаимодействующая с токосъемником, который через телескопический механизм закреплен на тележке, движущейся по противоположной стороне оросительного канала, при этом выход токосъемника соединен с входом щита управления, выход которого соединен с входом счетчика электрической энергии, выходы которого соединены с входами контактора, микропроцессорного блока управления и частотного преобразователя, входы микропроцессорного блока управления соединены с таймером, системой стабилизации курса, системой синхронизации тележек в линию, датчиками пути, задатчиком нормы полива, задатчиком длины участка полива, расходомером и манометром, установленным на трубопроводе, а выходы микропроцессорного блока управления соединены с электрогидрозадвижкой, частотным преобразователем, контактором, приборами синхронизации тележек в линию и приборами стабилизации курса левого и правого крыла через вакуум-насос с входом насоса, выход которого через электрогидрозадвижку и расходомер соединен с трубопроводом, при этом микропроцессорный блок управления соединен с входом-выходом интерфейсного устройства, сигнал с выхода частотного преобразователя подается на электропривод левого и правого крыла машины, а выход контактора соединен через электродвигатель с входом насоса. Популярные патенты: 2086081 Рабочий орган культиватора ... вид спереди; на фиг.4 разрез А-А на фиг.1; на фиг.5 развертка [-образного профиля; на фиг.6 общий вид рабочего органа культиватора с двумя [-образными профилями, вид спереди; на фиг.7 то же, вид в плане; на фиг.8 и 9 разрезы Б-Б и В-В на фиг.6 соответственно; на фиг.10 разрез Г-Г на фиг.9; на фиг.11 и 12 схемы, иллюстрирующие выкройки [-образного профиля из полосового и листового проката соответственно; на фиг. 13 16 схемы, иллюстрирующие использование рабочих органов при междурядной обработке различных сельскохозяйственных культур. Сущность изобретения заключается в следующем. Рабочий орган культиватора включает стойку 1 и один (фиг.1 4) или два (фиг.6 9) [-образных профиля 2. ... 2402211 Способ получения трансгенных кроликов, продуцирующих белки в молочную железу ... самки крольчата пали. Всего получено 10 живых потомков. У 4 крольчат обнаружена интеграция гена фрагмент -казеина-hGMCSF. Выход трансгенных особей от общего числа потомства - 40%.Самки половозрелого возраста окролилась. В молоке 2-х самок был обнаружен целевой белок - гранулоцитарный макрофаговый колониестимулирующий фактор человека (табл.3). Таблица 3 опыта Число потомков Число трансгенных потомков (%) Трансгенные потомки , полч-ГМКСФ, мг/литр молока 16 2 (33%) 45 самка 0,1-0,4 47 самец 24 2 (50%) 50 самец 51 самка0,2-0,6 Таким образом, отличительными особенностями изобретения являются: 1. Выявление человеческих моноклональных антител в отличие от ... 2050341 Устройство для переработки органического субстрата в биогумус ... механизма и загружается в межстенное пространство стен 2 и 8. При загрузке органического субстрата и выгрузке биогумуса ходовая тележка обеспечивает перемещение погрузчика-перегружателя 25 над устройствами, где формируются курганы. Приводные колеса (на чертеже не показано) приводятся в работу от электрического двигателя. По концам направляющих 24 установлены упоры, путевые выключатели и рельсовые противоугонные захваты (на чертеже не показано). Подъемник производит захват, подъем и перемещение органического субстрата (навоза, торфа, соломы.) в межстенное пространство стен 2 и 8 и при помощи приводной тележки механизма подъема обеспечивается подъем и опускание грейфера. При ... 2028763 Измельчитель древесной поросли ... следует принимать равной нулю. Исключив из системы неравенств (6) величины К и , с учетом выражений (7) и (8) получают уравнение (1). П р и м е р. Данo: d=10 см; R=61 см; h=22 см; V=56 см/c; А= 1,2 см; = 60о. Вычисляют по формуле (9) величину = =5,4 см, вычисляют по формулам (7) и (8) углы o = =0,927 рад; к = 1,972 рад. Подставляют в формулу (1) численные значения соответствующих величин и получают f=5,9 с-1 . Таким образом, для того чтобы каток радиусом 61 см с ножами 22 см смог измельчить дерево диаметром 10 см при скорости движения транспортного средства 58 см/с, его вибратор должен создавать вибрацию ножей катка с частотой не менее 5,9 с-1 и амплитудой не менее 1,2 см. ... 2485083 Способ получения замещенных пиримидин-5-илкарбоновых кислот ... раствора гидроксида натрия (7%) и кипятили 1 час. После охлаждения к смеси добавляли 0.15 моль раствора соляной кислоты (5%). Выпавший осадок 2-бензиламино-4-метилпиримидин-5-илкарбоновой кислоты отфильтровывали, промывали водой.Выход 96%, т.пл. >222°С возгоняется. Найдено (%):C, 59,51; H, 6,80; N, 19,03. C13 H13N3O2. Вычислено (%):C, 59,71; H, 6,83; N, 18,99. Спектр ЯМР1 3.24 (3H, с, CH 3); 4,62 (2H, с, CH3); 7.35 (3H, м, 3CH-арил.); 8.14 (2H, м, 2CH-арил.); 8.60 (1H, с, CH-пиримид.); 9.53 (1H, с, NH); 13,10 (1H, уш.с, COOH). Масс-спектр, m/z 242 [М-1] +.ПРИМЕР 4. 4-метил-2-(2-фенилэтиламино)-пиримидин-5-илкарбоновая кислота Смесь 0.11 моль ацетоуксусного эфира 0.12 ... |
Еще из этого раздела: 2453091 Способ обработки почвы 2302109 Способ снижения уровня никеля и свинца в крови и молоке коров техногенной провинции 2476277 Способ защиты почв от остатков пестицидов 2476068 Фильтр для использования при переработке пищевых продуктов 2236124 Способ создания местообитания и адаптации молоди объектов аквакультуры в водных экосистемах 2452165 Высевающий аппарат зерновой сеялки с централизованным дозированием семян 2130247 Замкнутый пневмосепаратор 2182765 Имитатор звуков рыб 2494588 Лемех плуга 2423036 Биоконтейнер для посадки растений |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||
 1335201, A01G 25/09], включающая дождеватели, установленные на трубопроводе машины, опорные тележки с электроприводом и концевыми выключателями, соединенными с блоками стабилизации машины в линию. Машина снабжена включенными между трубопроводом и дождевателями электроуправляемыми клапанами, разделенными на группы по числу концевых выключателей и подключенными параллельно последним к блоку стабилизации машины в линию, причем электроуправляемые клапаны в каждой группе установлены на трубопроводе машины симметрично опорным тележкам машины.
1335201, A01G 25/09], включающая дождеватели, установленные на трубопроводе машины, опорные тележки с электроприводом и концевыми выключателями, соединенными с блоками стабилизации машины в линию. Машина снабжена включенными между трубопроводом и дождевателями электроуправляемыми клапанами, разделенными на группы по числу концевых выключателей и подключенными параллельно последним к блоку стабилизации машины в линию, причем электроуправляемые клапаны в каждой группе установлены на трубопроводе машины симметрично опорным тележкам машины. и времени полива точки поля дождевым облаком lд (например, lд=11,4 м - ширина дождевого облака для дождевальных машин типа «Кубань-Л»):
и времени полива точки поля дождевым облаком lд (например, lд=11,4 м - ширина дождевого облака для дождевальных машин типа «Кубань-Л»):
 за время t1, со скоростью
за время t1, со скоростью  за время t2 при непрерывном движении, обеспечивая соответственно норму полива m1 и m2.
за время t2 при непрерывном движении, обеспечивая соответственно норму полива m1 и m2. дв=0,85
дв=0,85 0,9. В качестве источника электрической энергии для электроприводов служит сама электрическая сеть. То есть нет необходимости применения двигателя внутреннего сгорания и генератора.
0,9. В качестве источника электрической энергии для электроприводов служит сама электрическая сеть. То есть нет необходимости применения двигателя внутреннего сгорания и генератора.

 .
.