Способ контроля качества убранной массыПатент на изобретение №: 2483522 Автор: БЕНКЕ Вилли (DE) Патентообладатель: КЛААС Зельбстфаренде Эрнтемашинен ГмбХ (DE) Дата публикации: 10 Июня, 2013 Начало действия патента: 6 Ноября, 2008 Адрес для переписки: 197101, Санкт-Петербург, а/я 128, "АРС-ПАТЕНТ", пат.пов. В.М. Рыбакову, рег. № 90 Изображения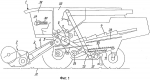 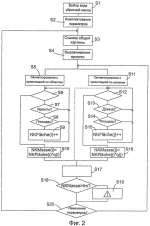  Группа изобретений относится к способу оценки содержания нежелательных частиц в зерновой убранной массе. Первым шагом способа является снятие общей картины убранной массы. Далее на снятой общей картине идентифицируют изображения, по меньшей мере, одного типа нежелательных частиц. Затем измеряют площадь, занятую изображением каждой выявленной частицы в общей картине. Устанавливают содержание нежелательных частиц пропорционально площади выявленных изображений. Идентификацию на снятой общей картине выполняют на основе, по меньшей мере, одного регулируемого параметра с дополнительным шагом - принимают выбранную пользователем величину параметра. Компьютер для осуществления способа связан с камерой, при этом он выполнен программируемым. Изобретение обеспечивает более свободное от влияния общего фона способа определения качества зерновой убранной массы, который позволяет производителям надежно соблюдать желаемое качество убранной массы без ненужных потерь товарной массы из-за излишне строгой настройки уборочной машины. 2 н. и 12 з.п. ф-лы, 3 ил. ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУОбласть техники Настоящее изобретение относится к способу оценки содержания нежелательных частиц в убранной массе. Уровень техники Качество, в особенности чистота убранной массы, такой как зерновые, имеет решающее значение для возможностей дальнейшей обработки и, соответственно для цены, которую может получить за убранную массу сельский хозяин. В общем случае приемщик убранной массы определяет граничные величины содержания нежелательных частиц в убранной массе, и их несоблюдение приводит к снижению цены при закупке. Способ и приемы уборки убранной массы оказывают значительное влияние на количество содержащихся в убранной массе нежелательных компонентов. Так, например, в зерноуборочном комбайне при слишком строгой настройке молотильного аппарата получается повышенное содержание битого зерна, что нежелательно, так как снижается стойкость зерна при хранении. При слишком мягкой настройке в зерновую массу попадают не полностью обмолоченные зерна, что мешает последующей обработке. Полова и соломенная труха, попавшая в зерновой поток при обмолоте, может быть отсеяна в расположенном за молотильной ступенью воздушном сепараторе, однако слишком строгая настройка воздушного сепаратора также приводит к потерям зерна. Поэтому для сельского хозяина очень важно, с одной стороны, надежно соблюсти заданные для него показатели в отношении качества убранной массы, но с другой стороны, избежать потерь убранной массы, которые не являются необходимыми для соблюдения заданного качества. Для этого желательно иметь возможность определять качество убранной массы уже в процессе уборки, чтобы при необходимости предпринимать меры для получения требуемого качества или предотвращать ненужные потери. Из патентного документа ЕР 1763988 А1 известен способ регулирования или настройки рабочих агрегатов уборочной машины, при котором создается изображение потока убранной массы. Оператор уборочной машины может на основе этого изображения, в особенности при его сравнении с заложенным эталонным изображением, определять степень загрязнения убранной массы и при необходимости изменять рабочие параметры в уборочной машине, которые обеспечивают улучшение качества убранной массы или снижение потерь. Однако такое обычное определение качества убранной массы оператором машины не является полностью объективным, и достоверность способа в сильной степени зависит от внимания, которое оператор может уделять качеству убранной массы. Эта доля внимания обычно не слишком велика, так как оператор одновременно занят управлением уборочной машиной. В патентном документе DE 19720121 С2 описан способ количественного определения нежелательного содержания компонентов, таких как ботва и почва в сахарной свекле или испорченные ягоды в виноградных кистях. При этом способе производится восприятие цветных изображений убранной массы, генерируются цветные гистограммы воспринятых изображений и по относящимся к содержанию нежелательных компонентов величинам цветов делается вывод о содержании нежелательных компонентов. Для обеспечения надежных результатов такой способ требует четкой цветовой разницы между желательными и нежелательными компонентами убранной массы. Поскольку этот способ не дает возможности делать различие между изображением свободно лежащего, хорошо освещенного, но темного объекта и изображением объекта светлого, но затененного другими объектами, измерение посредством данного способа неизбежно обременено фоновым сигналом, которым нельзя пренебречь. При использовании способа приемщиком убранной массы это приемлемо, поскольку для определения закупочной цены он должен только проверить, что соблюдены заданные граничные величины чистоты убранной массы, но ему не нужно устанавливать, насколько показатели чистоты могут не достигать граничных величин. Именно это делает известный из DE 19720121 С2 способ по существу неприменимым при сборке урожая. Раскрытие изобретения Задачей изобретения является устранение недостатков известных решений уровня техники и в особенности создание более свободного от влияния общего фона способа определения качества убранной массы, который позволяет производителям надежно соблюдать желаемое качество убранной массы без ненужных потерь товарной массы из-за излишне строгой настройки уборочной машины. В соответствии с изобретением решение поставленной задачи достигается за счет способа оценки содержания нежелательных частиц в убранной массе, содержащего шаги: a) снимают (фотографируют) общую картину убранной массы, b) на снятой общей картине идентифицируют изображения, по меньшей мере, одного типа нежелательных частиц, c) измеряют площадь, занятую изображением каждой выявленной частицы в общей картине, d) устанавливают содержание нежелательных частиц пропорционально площади выявленных изображений. При обычном построении гистограммы для каждой отдельной точки общей картины принимается решение, соответствует ли ее цветовой тон или модуль цвета цветовому тону нежелательной частицы, без учета соседних точек, так что не могут быть учтены отклонения окраски вследствие различных условий освещения и затенения. В отличие от этого в способе по изобретению идентификация изображений нежелательных частиц содержит оценку пикселей изображения не только как таковую, а с учетом информационного содержания соседних пикселей. За счет этого могут быть распознаны и учтены в особенности имеющие локальное распространение модели или формы, которые являются типичными для изображений определенных классов нежелательных частиц. Измерение площади такого выявленного изображения частицы позволяет определить ее величину, а косвенным образом также и ее массу. Исходя из этого можно на основе количественной доли изображений нежелательных частиц на площади общей картины определить также количественное содержание этих нежелательных частиц в убранной массе. Последнюю операцию предпочтительно осуществляют посредством того, что выявленную площадь умножают на коэффициент коррекции или перевода. Этот коэффициент коррекции, установленный в типовом случае эмпирическим путем, учитывает различные характеристики нежелательной частицы, например тенденцию особенно легких и крупных частиц к скоплению на верхней поверхности движущегося потока убранной массы или тот факт, что битые зерна, образующие важный класс нежелательных частиц в зерновой убранной массе, такой как злаковые культуры, поддаются распознаванию только при их соответствующей ориентации. В предпочтительном примере осуществления на дополнительном шаге е) способа выделяют выявленные на шаге с) изображения нежелательных частиц в общей картине и отображают полученную таким образом общую картину. Это позволяет пользователю в любой момент проверить качество измерения, то есть полноту выявления нежелательных частиц. В простейшем случае пользователь может использовать полученную информацию следующим образом. Если он видит, что не все нежелательные частицы идентифицированы на шаге b), он делает вывод о том, что действительное содержание нежелательных частиц выше выявленного. Если он видит, что на шаге d) желательные частицы ложно идентифицированы как нежелательные, он делает вывод о том, что действительное содержание нежелательных частиц ниже выявленного. Когда идентификация на шаге b) производится на основе, по меньшей мере, одного регулируемого параметра, предпочтительно способ дополнительно содержит шаг принятия величины параметра, выбранной пользователем. Это позволяет пользователю оказывать влияние на распознавание нежелательных частиц и оптимизировать точность распознавания. В том случае, когда пользователь изменил такой регулируемый параметр, предпочтительно шаги с) и е) повторяют на той же снятой общей картине, так что пользователь может непосредственно сделать вывод о последствиях предпринятого им изменения. При этом пользователь не обязан понимать значение регулируемого параметра для распознавания нежелательных частиц, то есть он может производить оптимизацию распознавания просто методом проб и ошибок. Когда установленное на шаге d) содержание изображений нежелательных компонентов переходит граничную величину, предпочтительно вырабатывается предупредительный сигнал, чтобы побудить пользователя подрегулировать параметры обработки убранной массы для улучшения ее качества. Согласно следующему решению по развитию способа настройка этих параметров может осуществляться также автоматически. Для того чтобы выявить статистические колебания, в предпочтительном примере осуществления шаг е) выполняют при определенных обстоятельствах совместно для нескольких снятых общих картин. Такая совместная обработка может быть основана на том, что, например, несколько снятых общих картин соединяют в общую картину с увеличенной в несколько раз площадью, а шаги способа, начиная с шага b), выполняют на объединенной общей картине. В альтернативном примере осуществления шаги от b) до d) выполняют раздельно для каждой общей картины, а установленные величины приводят к средней величине. Предлагаемый способ особенно пригоден для мониторинга потока убранной массы в уборочной машине, такой как зерноуборочный комбайн. Как уже было упомянуто, одним классом нежелательных частиц могут быть битые зерна. Изображение такого битого зерна идентифицируется в общей картине как светлая или яркая зона, которая соответствует разломанному мучнистому ядру, в то время как оболочка зерна обычно более темная. Для того чтобы иметь возможность отличать битое зерно от частиц другого вида и/или от оптических явлений освещения, предпочтительно яркая зона идентифицируется как битое зерно в том случае, когда ее распространение или размер лежит в предварительно заданной области. В целом можно сказать, что в предпочтительном примере осуществления, и в особенности когда дело касается идентификации нежелательных частиц, которые отличаются от желаемой убранной массы своей яркостью (в одной или нескольких спектральных областях), общую картину предпочтительно сегментируют с ориентацией по областям и на основе яркости каждой отдельной полученной области решают, является ли она изображением нежелательной частицы или нет. Когда классом нежелательных частиц является соломенная труха, она может быть всегда идентифицирована на шаге b), когда в общей картине имеется распространение зоны в продольном направлении в первой области оценки и в поперечном направлении в другой второй области оценки. В целом для идентификации нежелательных частиц, которые отличаются от желаемой убранной массы больше своей формой, чем яркостью или окраской, общую картину предпочтительно сегментируют с ориентацией по кромкам и на основе длины каждой полученной кромки решают, отображает ли она нежелательную частицу или нет. Предметом изобретения является также компьютерная программа с машинными кодами для выполнения шагов описанного способа на связанном с камерой компьютере или компьютерный программный продукт с машинными кодами, которые записаны на читаемом компьютером носителе данных, для выполнения способа на связанном с камерой компьютере. Следующим предметом изобретения является сам компьютер, связанный с камерой и оснащенный соответствующим образом для выполнения способа, особенно в том случае, когда он встроен в уборочную машину, а камера расположена таким образом, чтобы генерировать общие картины потока убранной массы в уборочной машине. Такой компьютер далее может быть выполнен с возможностью управления параметрами обработки убранной массы в уборочной машине на основе установленного содержания нежелательных частиц. Краткий перечень чертежей Далее со ссылками на прилагаемые чертежи будут подробно описаны примеры осуществления изобретения, его другие особенности и преимущества. Фиг.1 схематично изображает на виде сбоку уборочную сельскохозяйственную машину в виде зерноуборочного комбайна, фиг.2 изображает блок-схему программы контроля качестве убранной массы, выполняемой бортовым компьютером комбайна, фиг.3 представляет пример изображения, отображаемого на мониторе компьютера в кабине водителя. Осуществление изобретения На фиг.1 схематично показан на виде сбоку зерноуборочный комбайн 1. Жатвенный аппарат 2 комбайна служит для срезания и приема стеблей растительности с поверхности 32 почвы и подачи убранной массы к питателю 3. В питателе 3 расположены бесконечные тяговые цепи 4 со скребками, подающие убранную массу к расположенным сзади молотильным аппаратам 6, 7. У конца питателя 3 убранная масса захватывается подающим барабаном или барабаном 5 предварительного разгона и ускоряется при проходе вдоль окружной поверхности барабана 5 между ним и подбарабаньем 8. Ускоренный поток убранной массы передается на молотильный барабан 6 и получает дальнейшее ускорение. За счет ударного и фрикционного воздействия барабана 5 предварительного разгона и молотильного барабана 6, а также действующей на убранную массу центробежной силы товарная убранная масса отделяется от колосьев и соломы и поступает через проницаемое для убранной массы подбарабанье 8 на подготовительный поддон 27. Солома на выходе молотильного барабана 6 отводится отклоняющим барабаном 7 на несколько соломотрясов 9, расположенных рядом друг с другом по рабочей ширине. Колебательное движение соломотрясов 9 и их клавишная конструкция обеспечивают транспортирование соломы к заднему концу комбайна и отделение еще находящейся в соломе товарной убранной массы. Это остаточное количество также передается на подготовительный поддон 27 с помощью обратного поддона 28, также совершающего колебательные движения. Находящаяся на подготовительном поддоне 27 убранная масса с другими примесями, такими как соломенная труха, полова и частицы колосьев, за счет его колебательного движения и его ступенчатой конструкции сепарируется и подается на последующие очистные устройства, то есть на верхнее решето 10 и нижнее решето 11. Перегрузка на верхнее решето 10 осуществляется через ступень 34 падения, обдуваемую воздухом от очистного вентилятора 24. Верхнее решето 10 и расположенное под ним нижнее решето 11, как правило, являются пластинчатыми решетами с раздельно регулируемым размером ячеек. Оба решета 10, 11 продуваются воздушным потоком, создаваемым очистным вентилятором 24. Колебательное движение решет 10, 11 и воздушный поток обеспечивают транспортирование убранной массы с примесями к заднему концу уборочной машины. На ступени 34 падения крупные и легкие примеси захватываются воздушным потоком до попадания на верхнее решето 10 и выносятся из комбайна 1. Более мелкие и тяжелые компоненты убранной массы поступают от подготовительного поддона 27 через ступень 34 падения на верхнее решето 10. В зависимости от настройки размера ячеек верхнего решета 10 отдельные зерна и другие компоненты убранной массы проходят через него и поступают на нижнее решето 11. Солома и не обмолоченные колосья проходят над верхним решетом 10 и падают в его задней части через него непосредственно в так называемую массу возврата на обработку. Нижнее решето 11 имеет, как правило, более мелкую пластинчатую структуру, чем верхнее решето 10, и при нормальной работе настраивается на более мелкий размер ячеек по сравнению с верхним решетом 10. Более крупные и легкие компоненты убранной массы, такие как зерна с половой, частицы колосьев или соломенная труха, передаются в массу возврата на обработку при падении через верхнее решето 10 на нижнее решето 11 за счет колебательного движения и воздушного потока. Очищенная убранная масса как таковая падает непосредственно через нижнее решето 11 и транспортируется посредством подающего шнека и зернового элеватора 13 в зерновой бункер 33. Камера 20 и световой источник для освещения поля обзора камеры 20 установлены на пути зерна ниже по потоку за нижним решетом 11. Так, например, они могут быть помещены под нижним решетом 11 и направлены на наклоненный к зерновому элеватору 13 стрясной поддон 21 для съемки изображений проходящей по нему убранной массы. Возможен вариант их установки на самом зерновом элеваторе. Убранная масса, поступившая в массу возврата на обработку, с помощью подающего шнека и возвратного элеватора 12 подается вновь к месту над барабаном 5 предварительного разгона для возврата в процесс обмолота. Зерноуборочный комбайн 1 оснащен кабиной 35 водителя, в которой расположен блок 29 управления и мониторинга, функционирующий в качестве операторского интерфейса бортового компьютера 30. На фиг.2 показана блок-схема способа, выполняемого бортовым компьютером 30, связанным с камерой 20. Каждый раз в начале процесса уборки бортовой компьютер 30 на шаге S1 делает запрос водителю для ввода вида убираемой массы. Бортовой компьютер 30 имеет в своем распоряжении банк данных, в котором заложены наборы параметров для различных возможных убираемых масс, необходимые для последующей обработки, как это будет описано далее. Этот банк данных может быть предварительно заполнен изготовителем комбайна соответствующими величинами параметров для различных видов убираемых масс, однако он может по мере надобности редактироваться пользователем для обеспечения возможности настройки. Согласно предпочтительному примеру осуществления вводимые на шаге S2 параметры содержат как те параметры, которые относятся к оценке получаемых от камеры 20 изображений, как это будет более подробно описано дальше, так и параметры настройки молотильной и очистной ступеней комбайна 1, такие как скорости барабанов, размеры ячеек решет, объемная подача вентилятора и другие, которые оказывают влияние на качество и чистоту конечной убранной массы и могут быть настроены бортовым компьютером 30 с помощью соответствующих исполнительных органов (не представлены) на молотильной и очистной ступенях. Согласно упрощенному примеру осуществления вводимые на шаге S2 параметры относятся только к оценке бортовым компьютером 30 изображений, получаемых от камеры 20. В этом случае от водителя требуется предварительно настроить молотильную и очистную ступени на конкретный вид убираемой массы. Как только мимо камеры 20 начинает проходить устойчивый поток убранной массы, бортовой компьютер 30 на шаге S3 передает на нее команду снимать изображение убранной массы. Для подготовки к обработке изображения в более узком смысле вначале на шаге S4 на этом изображении производится выравнивание яркости. Другими словами, те участки изображения, которые на протяжении заметно большем размера частицы желаемой убранной массы, являются более светлыми или более темными, чем средняя величина для снимаемого изображения, затемняются или высветляются вычислительным методом, чтобы выровнять случайные колебания яркости, которые создаются, например, вследствие локальных колебаний толщины слоя и за счет этого колебаний удаления от светового источника или локального затенения. Полученная таким образом общая картина подвергается сегментированию. Оно может быть ориентированным по областям или ориентированным по кромкам. При наличии достаточной вычислительной мощности бортового компьютера 30 на одной и той же общей картине может быть выполнено сегментирование различных видов. Вначале будет рассмотрено сегментирование с ориентацией по областям. При таком сегментировании общая картина разбивается на большое число областей, причем каждая область характеризуется величиной яркости или окраски, которой она отличается от смежных областей, а съемка производится таким образом, что в области представлен точно один объект. Метод сегментирования с ориентацией по областям известен под ключевыми словами: "Region Growing (наращивание областей)", "Regent Splitting (разбивка по областям)", "Pyramid Linking (пирамидальная компоновка)" и "Split and Merge (разбивка и объединение)" и не нуждается в отдельном описании. После выполнения сегментирования на шаге S6 выбирается область изображения, а на шаге S7 проверяется, обладает ли она яркостью, которая в достаточной степени отличается от заданной величины или от средней величины яркости изображения, так что исследуемая область может быть, например, изображением поверхности излома зерна. Если нет, то на шаге S6 выбирается новая область. Если яркость имеет достаточное отклонение, способ переходит к шагу S8, на котором определяется площадь данной области, например, путем подсчета относящихся к нему пикселей изображения. Полученная таким образом площадь на шаге S9 добавляется к установленной на ноль на шаге S5 счетной величине NKläche (i), которая является мерой доли или содержания изображений незернового материала NK типа i в общей площади картины. В данном случае незерновой материал NK типа i является поверхностями излома зерна. За этим может следовать повторение шагов S7-S9 на основе заложенных параметров распознавания незернового материала других типов. Далее на шаге S6 выбирается новая область и так до тех пор, пока не будут обработаны все области. Затем способ переходит к шагу S10, на котором счетная величина NKFläche (i) умножается на коэффициент q(i) коррекции или перевода, характерный для вида убранной массы и типа незернового материала, для получения оценочной величины содержания NKMasse (i) массы битого зерна в общей массе убранного материала. Коэффициент q(i) коррекции является эмпирической величиной, относящейся к параметрам ввода на шаге S2. Кроме битого зерна другим важным классом нежелательных частиц является соломенная труха. Ее окраска в аспекте яркости не отличается существенно от окраски зерен, так что для ее идентификации предпочтительно сегментирование (шаг S11) с ориентацией по кромкам. Однако в целях снижения до минимума вычислений бортового компьютера 30 может быть принят отказ от сегментирования с ориентацией по кромкам, как это обозначено на схеме штриховой стрелкой, и в этом случае идентифицируемые на шаге S5 границы областей распознаются в качестве кромок. Итак, на шаге S12 выбирается одна из полученных таким образом кромок и вначале на шаге S13 определяется ее длина. Если она не превышает предварительной заданной граничной величины, принимается, что кромка ограничивает изображение зерна, и способ возвращается к шагу S12 для выбора новой кромки. Если же кромка имеет достаточную длину, на шаге S14 определяется площадь области, ограничиваемой этой кромкой, или ее ширина, то есть протяженность в поперечном направлении к этой кромке, и при их достаточных величинах принимается, что в данном случае имеет место короткий отрезок соломы. На шаге S15 его площадь добавляется к установленной при сегментировании на ноль счетной величине NKFläche (j). Другие кромки уже просуммированной площади вычеркиваются из числа кромок, которые подлежат выбору на шаге S12, чтобы устранить многократный учет одного и того же отрезка соломы. После обработки таким путем всех кромок на шаге S16 вычисляется величина содержания NKMasse (j) массы соломенной трухи посредством умножения величины NKFläche (j) на соответствующий коэффициент q(j) коррекции. На шаге S17 бортовой компьютер 30 показывает на экране блока 29 управления и мониторинга полученную на шаге S3 общую картину, на которой выделены все области, идентифицированные в качестве изображений незерновых компонентов, а также указано вычисленное содержание NKMasse (i) массы битого зерна и содержание NKMasse (j) массы соломенной трухи. Таким образом, водитель получает данные анализа качества убранной массы и одновременно может убедиться в достоверности оценки путем проверки того, действительно ли все выделенные области картины содержат незерновые компоненты или действительно ли все незерновые компоненты, которые он узнает на картине, распознаны также бортовым компьютером 30. На шаге S18 бортовой компьютер 30 проверяет, превышает ли содержание этих отслеженных незерновых компонентов предварительно заданную граничную величину. Если да, то на шаге S19 предпринимаются меры противодействия. Они могут заключаться в том, что бортовой компьютер 30 сам выбирает рабочий параметр молотильной и/или очистной ступени, который оказывает влияние на содержание соответствующего незернового материала, и регулирует его для снижения содержания незернового материала. Альтернативно меры противодействия на шаге S19 могут ограничиваться тем, чтобы водитель получил предупреждение и сам мог предпринять требуемую настройку параметров. В том случае, если водитель на основе отображаемой на шаге S17 общей картины устанавливает значительную степень погрешности определения, он разумным образом через посредство блока 29 управления и мониторинга модифицирует одну или другую граничную величину параметров, исследуемых в ходе шагов S7, S8, S13, S14. В этом случае способ возвращается от шага S20 к сегментированию на шаге S5 или S11 и повторяет их для идентификации незерновых компонентов на основе той же общей картины. Когда обработанная общая картина вновь отображается на шаге S17, водитель может непосредственно видеть, стало ли распознавание незерновых компонентов лучше или хуже, и либо принять либо отвергнуть изменение параметров. На фиг.3 показан пример изображения, отображаемого на экране блока 29 управления и мониторинга. Текстовая область в верхней части экрана указывает типы распознаваемого незернового материала: битое зерно, полова и соломенная труха. Расположенные рядом с обозначениями типов диалоговые поля 36 могут быть заполнены водителем величинами 0, 1, 2, которые обозначают соответственно рабочий режим с отключением распознавания, рабочий режим с включением распознавания по заложенным в памяти параметрам распознавания и режим изменения параметров распознавания. Для типа незернового материала «соломенная труха» активизирован режим изменения параметров распознавания, а в качестве изменяемых параметров отображены длина и площадь и их текущие величины. В нижней области экрана показана снятая камерой 20 общая картина. Выявленный в картине отрезок соломы выделен вписанной рамкой 37. ФОРМУЛА ИЗОБРЕТЕНИЯ1. Способ оценки содержания нежелательных частиц в зерновой убранной массе, содержащий следующие шаги:a) снимают (S3) общую картину убранной массы,b) на снятой общей картине идентифицируют (S5-S8; S11-S14) изображения, по меньшей мере, одного типа нежелательных частиц,c) измеряют (S8; S14) площадь, занятую изображением каждой выявленной частицы в общей картине,d) устанавливают (S9; S15) содержание нежелательных частиц пропорционально площади выявленных изображений, отличающийся тем, что идентификацию на шаге b) выполняют на основе, по меньшей мере, одного регулируемого параметра с дополнительным шагом:f) принимают (S20) выбранную пользователем величину параметра. 2. Способ по п.1, отличающийся тем, что на шаге d) выявленную площадь умножают (S10; S16) на коэффициент коррекции, чтобы получить содержание посторонних тел, выраженное как отношение массы посторонних тел к общей массе убранной массы. 3. Способ по п.1, отличающийся тем, что дополнительно содержит следующий шаг:е) выделяют выявленные на шаге с) изображения нежелательных частиц в общей картине и отображают (S17) полученную таким образом общую картину. 4. Способ по п.3, отличающийся тем, что после каждого выполнения шага f) (S20) шаги с) (S8; S14) и е) (S17) повторяют на той же снятой общей картине. 5. Способ по любому из пп.1-4, отличающийся тем, что дополнительно содержит следующий шаг:g) вырабатывают (S19) предупредительный сигнал, когда установленное содержание переходит граничную величину. 6. Способ по п.3, отличающийся тем, что шаг е) выполняют при определенных обстоятельствах совместно для нескольких снятых общих картин. 7. Способ по любому из пп.1-4, отличающийся тем, что принимаемая на шаге а) убранная масса является потоком убранной массы в уборочной машине. 8. Способ по любому из пп.1-4, отличающийся тем, что классом нежелательных частиц являются битые зерна, а на шаге b) идентифицируют изображение битого зерна, когда протяженность яркой зоны в общей картине лежит в предварительно заданной области. 9. Способ по любому из пп.1-4, отличающийся тем, что общую картину сегментируют (S5) с ориентацией по областям и на основе яркости каждой отдельно полученной области решают (S7), является ли она изображением нежелательной частицы или нет. 10. Способ по любому из пп.1-4, отличающийся тем, что классом нежелательных частиц является соломенная труха, а на шаге b) идентифицируют (S14, S15) отрезок соломы, когда в общей картине имеется распространение зоны в продольном направлении в первой области и в поперечном направлении в другой, второй области. 11. Способ по любому из пп.1-4, отличающийся тем, что общую картину сегментируют (S11) с ориентацией по кромкам и на основе длины полученной кромки решают (S13), является ли она изображением нежелательной частицы или нет. 12. Компьютер (30), связанный с камерой (20) и характеризующийся тем, что он выполнен программируемым для выполнения способа по любому из пп.1-11. 13. Компьютер по п.12, отличающийся тем, что он встроен в уборочную машину, а камера (20) расположена таким образом, чтобы генерировать общие картины потока убранной массы в уборочной машине. 14. Компьютер по п.12 или 13, отличающийся тем, что он дополнительно выполнен с возможностью управления параметрами обработки убранной массы в уборочной машине на основе установленного содержания нежелательных частиц. Популярные патенты: 2435369 Гербицидные композиции ... анилофос, бенсулид, биланафос, бутамифос, 2,4-DEP, DMPA, EBEP, фосамин, глуфосинат, глифосат и пиперофос;феноксигербициды, такие как бромофеноксим, кломепроп, 2,4-DEB, 2,4-DEP, дифенопентен, дисул, эрбон, этнипромид, фентеракол и трифопсим; гербициды класса феноксиуксусных кислот, такие как 4-CPA, 2,4-Д(2,4-D), 3,4-DA, МЦПА(МСРА), МЦПА-тиоэфир и 2,4,5-Т;гербициды класса феноксимасляных кислот, такие как 4-СРВ, 2,4-DB, 3,4-DB, MCPB и 2,4,5-TB;гербициды класса феноксипропионовых кислот, такие как клопроп, 4-СРР, дихлорпроп, дихлорпроп-П, 3,4-DP, фенопроп, мекопроп и мекопроп-П;гербициды класса арилоксифеноксипропионовых кислот, такие как хлоразифоп, клодинафоп, клофоп, ... 2007901 Устройство для хранения овощей и фруктов ... внутри камеры и сообщенным с нижней полостью воздуховодом, выполненным в виде замкнутой полости со сквозными отверстиями, обращенными внутрь шкафа на уровнях, соответствующих уровням секций, нагреватель выполнен в виде блока нагревателей, а также устройство снабжено блоком питания с сигнализацией, размещенным вне шкафа, при этом блок управления содержит последовательно соединенный первый диод, первый и второй резистор, компаратор, третий резистор и транзистор, эмиттер которого подключен к первому выходу блока питания и к первому входу блока нагревателей, четвертый, управляемый, пятый резисторы, включенные последовательно между выходом первого резистора и первым выходом блока ... 2092004 Композиционный состав для обработки растений и их органов ... составом и массовым содержанием компонентов, но и технологией приготовления рабочего композиционного состава. У каждого отдельно взятого компонента состава имеется определенная функциональная нагрузка, реализуемая только в тех вариантах состава, которые предлагаются авторами. Подбор компонентов состава производился с учетом их физической и химической активности, способности к совмещению с другими компонентами состава, пленкообразующей и обволакивающей способности, оптимизации технологии приготовления и использования состава и т. д. Очень важным свойством предлагаемого авторами состава является в этом плане его технологичность при хранении и использовании, отсутствие побочных ... 2201244 Препарат для защиты животных и растений ... вещество и твердый носитель. Активным веществом является комплекс авермектинов в концентрации 0,1-0,3%, а твердым носителем является перлит, или цеолит, или отработанный мицелий S.avermitilis. В зависимости от условий применения препараты изготавливают на основе трех комплексов авермектинов с различным содержанием индивидуальных авермектинов. Эффективность препарата составляет не менее 35%. Срок защиты действия растений составляет не менее 4 месяцев. 2 табл. Изобретение относится к области защиты животных и растений от паразитов и более конкретно к производству препаратов на основе авермектинов, получаемых путем микробиологического синтеза. Известно, что актиномицет Streptomyces ... 2142696 Способ выращивания цветочных и декоративных растений в тепличных и домашних условиях ... обильного полива и подкормок корнепитатель устанавливают в емкость на глубину 40-60 мм таким образом, чтобы не менее 50% от его длины находилось в почве, после чего производят обильный полив. Второй вариант. За 8-10 суток до начала периода обильного полива и подкормок корнепитатель погружают в воду и выдерживают в ней при 18-25oC, после чего устанавливают в емкость таким образом, как в первом варианте. По первому варианту способ выращивания цветочных и декоративных растений в тепличных и домашних условиях осуществляют следующим образом. За 30-35 суток до начала периода обильного полива и подкормок (для средней полосы началом можно считать, когда световой день составляет больше 10 ... |
Еще из этого раздела: 2130247 Замкнутый пневмосепаратор 2384048 Способ испытания травяного покрова на пойме малой реки 2437262 Культиватор-плоскорез 2185064 Вещество, обладающее пестицидной активностью, способ его получения, пестицидная композиция и способ контролирования вредителей 2230467 Добавка к пищевым продуктам, биоцидный препарат, 2-(1-окси- 4-гидроксифенилен)-бензохинон (варианты) и способ его получения 2114555 Способ электродиагностики вымени крупного рогатого скота и устройство для его осуществления 2218756 Способ изготовления антипаразитарного ошейника 2402211 Способ получения трансгенных кроликов, продуцирующих белки в молочную железу 2075933 Композиция для иммунизации растений от различных фитопатогенов 2159526 Устройство для навешивания сельскохозяйственных орудий на трактор |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||