Сельскохозяйственное транспортное средство с автоматическим рулевым управлением и способ управления транспортным средствомПатент на изобретение №: 2386234 Автор: БРУННЕРТ Андреас (DE) Патентообладатель: КЛААС Зельбстфаренде Эрнтемашинен ГмбХ (DE) Дата публикации: 20 Августа, 2007 Начало действия патента: 2 Февраля, 2006 Адрес для переписки: 191186, Санкт-Петербург, а/я 230, "АРС-ПАТЕНТ", пат.пов. В.М.Рыбакову, рег. 90 Изображения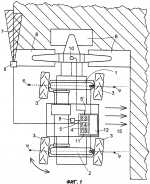  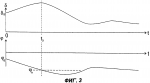 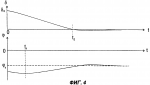 Средство, содержит, по меньшей мере, одну управляемую ходовую ось, датчик колеи движения, предназначенный для восприятия отклонения между заданным путем движения транспортного средства и его действительным путем движения, и устройство автоматического рулевого управления, выполненное с возможностью корректирующей регулировки управляемой ходовой оси в случае отклонения угла ( Область техники, к которой относится изобретение Настоящее изобретение относится к сельскохозяйственному транспортному средству, содержащему по меньшей мере одну управляемую ходовую ось, датчик колеи движения, предназначенный для восприятия отклонения между заданным путем движения транспортного средства и его действительным путем движения, и устройство автоматического рулевого управления, выполненное с возможностью корректирующей регулировки положения управляемой ходовой оси в случае отклонения угла поворота колес управляемой ходовой оси, воспринятого датчиком колеи движения, чтобы уменьшать это отклонение. Уровень техники Такое сельскохозяйственное транспортное средство известно, например, из патентного документа ФРГ Когда такое транспортное средство следует по ровной поверхности, существует однозначная корреляция между углом поворота колес управляемой ходовой оси, установленным устройством рулевого управления, и радиусом кривизны пути, пройденного транспортным средством. Когда устройство автоматического рулевого управления распознает отклонение между заданным и действительным пройденным путем, желательно это отклонение устранить как можно быстрее и для этого установить большой угол поворота колес. Однако этот слишком большой угол поворота колес приводит к тому, что курс движения транспортного средства пересекает заданный путь движения вместо того, чтобы приблизиться и слиться с ним, как это было бы желательно. Поэтому угол поворота колес должен устанавливаться не слишком большим, то есть следует избегать слишком резких движений рулевого управления при возврате транспортного средства на заданный путь движения. При направлении транспортного средства на склоне уже не существует такой однозначной корреляции между углом поворота колес управляемой ходовой оси и путем движения. Для прямого проезда по склону поперечно направлению наклона с сохранением высоты необходимо устанавливать угол поворота колес, который соответствует кривой, проходящей по склону вверх, причем величина угла поворота колес, требуемая для движения по прямой, зависит от наклона склона. Это создает проблемы при автоматическом рулевом управлении транспортным средством на наклонной поверхности. Тот угол поворота колес, который при движении по равнине подходил бы для корректировки отклонения от заданного пути, на склоне, в зависимости от его наклона, может оказаться недостаточным даже для приближения к заданному пути. И наоборот, при слишком резком повороте это приближение может оказаться настолько быстрым, что транспортное средство пересекает заданный путь движения и затем отклоняется от него в противоположном направлении. Раскрытие изобретения Задача, на решение которой направлено настоящее изобретение, заключается в создании сельскохозяйственного транспортного средства с точным автоматическим рулевым управлением также и при движении на склоне. В соответствии с изобретением решение поставленной задачи достигается в сельскохозяйственном транспортном средстве, содержащем по меньшей мере одну управляемую ходовую ось, датчик колеи (т.е. полосы или следа) движения, предназначенный для восприятия отклонения между заданным путем движения транспортного средства и его действительным путем движения, и устройство автоматического рулевого управления, выполненное с возможностью корректирующей регулировки управляемой ходовой оси в случае отклонения угла поворота колес управляемой ходовой оси, воспринятого датчиком колеи движения, чтобы уменьшать это отклонение. Согласно изобретению устройство рулевого управления через вход получает сигнал, который представляет наклон поверхности, проходимой транспортным средством, в направлении поперечно заданному пути движения, при этом устройство рулевого управления выполнено с возможностью учета этого наклона при корректирующей регулировке угла поворота колес. Другими словами, при наличии отклонения от заданного пути движения угол поворота колес, установленный устройством рулевого управления, может принимать отличные от заданного величины в зависимости от наклона склона; кроме того, также и при согласовании действительного пути движения с заданным может устанавливаться не затухающий (то есть не уменьшающийся до нуля) угол поворота колес для компенсации наклона склона. Для упрощения обработки данных в устройстве рулевого управления оно предпочтительно выполнено с возможностью вычислять и устанавливать угол поворота по меньшей мере одного колеса первой управляемой ходовой оси как суммы члена уравнения, зависящего от воспринятого отклонения, и члена уравнения, зависящего от наклона. Повышенная маневренность транспортного средства может достигаться за счет того, что оно содержит вторую управляемую ходовую ось, управляемую устройством рулевого управления. Для упрощения рулевого управления таким транспортным средством в предпочтительном варианте устройство рулевого управления выполнено с возможностью вычислять и устанавливать угол поворота по меньшей мере одного колеса второй управляемой ходовой оси на основе наклона и независимо от отклонения. В этом случае вторая управляемая ходовая ось служит только для компенсации наклона поверхности движения, а не для удержания транспортного средства на заданном пути движения. В последнем случае зависящий от наклона член уравнения при определении угла поворота колес для первой управляемой ходовой оси и угол поворота, устанавливаемый на второй управляемой ходовой оси, могут быть равны между собой. Это означает, что объем обработки данных для автоматического рулевого управления транспортным средством с двумя управляемыми ходовыми осями не превышает объема, необходимого для рулевого управления транспортным средством с единственной управляемой ходовой осью. Для обеспечения сигнала, представляющего наклон проходимой поверхности, транспортное средство предпочтительно снабжено датчиком наклона. В альтернативном варианте в качестве источника сигнала наклона может быть предусмотрена навигационная система, которая содержит топографическую карту проходимой поверхности и выполнена с возможностью определять положение транспортного средства на карте и из содержащейся в топографической карте высотной информации вырабатывать информацию о наклоне поверхности движения в определенном ею положении транспортного средства. Такая навигационная система для определения географического положения транспортного средства может также являться частью упомянутого датчика колеи движения. В этом случае он содержит также запоминающее устройство для описания заданного пути движения транспортного средства и средства для восприятия отклонения между установленным положением транспортного средства и заданным путем движения. Альтернативно или дополнительно датчик колеи движения может содержать датчик окрестности, определяющий окрестность, и средства для идентификации заданного пути движения в изображении окрестности, обеспечиваемом датчиком окрестности, и для определения положения транспортного средства относительно пути. Такой датчик колеи движения не требует картографической информации для определения заданного пути движения, а распознает его на основе признаков, воспринимаемых в окрестности транспортного средства. Еще одним предметом изобретения является способ рулевого управления транспортным средством, снабженным по меньшей мере одной первой управляемой ходовой осью, содержащий следующие этапы: a) воспринимают отклонение между заданным путем движения транспортного средства и его действительным путем движения, b) воспринимают наклон поверхности, проходимой транспортным средством, в направлении поперечно заданному пути движения, c) определяют угол поворота колес для управляемой ходовой оси на основе отклонения и наклона и устанавливают угол поворота колес на оси. Предпочтительно, на этапе с) угол поворота колес определяют путем сложения члена уравнения, зависящего от воспринятого наклона и не зависящего от воспринятого отклонения, и члена уравнения, зависящего от воспринятого отклонения и не зависящего от воспринятого наклона. Предпочтительно, угол поворота колес для второй управляемой ходовой оси транспортного средства определяют в зависимости от воспринятого наклона и независимо от воспринятого отклонения. Еще более предпочтительно, угол поворота колес для второй управляемой ходовой оси и член уравнения, зависящий от воспринятого наклона и независимый от воспринятого отклонения, устанавливают равными друг другу. Предпочтительной областью использования изобретения является область сельскохозяйственных машин, таких как тракторы, зерноуборочные комбайны и подобные мобильные средства, для которых важно точно выдерживать заданный путь движения для обработки сельскохозяйственной площади с минимальными затратами времени. К такой обработке может относиться вспашка, обработка почвы или уборка урожая. Дальнейшие предпочтительные примеры осуществления и дополнительные решения по развитию изобретения изложены в зависимых пунктах. Перечень чертежей Другие особенности и преимущества изобретения будут подробно описаны на примерах осуществления изобретения со ссылками на прилагаемые чертежи. На чертежах: фиг.1 схематично изображает в плане трактор с режущим аппаратом косилки при окашивании луга, фиг.2 изображает кривые в функции времени воспринятого отклонения между заданным и действительным путем движения и угла поворота колес, установленного для корректировки отклонения, при движении по равнине, фиг.3 изображает кривые отклонения и угла поворота колес при движении на склоне трактора с рулевым управлением не по изобретению, фиг.4 изображает кривые отклонения и угла поворота колес при движении на склоне трактора с рулевым управлением по изобретению. Осуществление изобретения На фиг.1 схематично показан в плане трактор, шасси которого имеет переднюю управляемую ходовую ось 1 и заднюю управляемую ходовую ось 2 с двумя колесами 3 на каждой оси. Угол поворота устанавливается отдельно для каждого колеса 3 устройством 4 рулевого управления, которое содержит микроконтроллер 11 и управляемый им гидравлический агрегат 12 для питания гидравлической жидкостью исполнительных цилиндров установки колес 3. Устройство 4 рулевого управления может, например, для обычного движения по кривой устанавливать для двух колес 3 передней управляемой ходовой оси 1 угол поворота, отличный от нуля, а для колес задней управляемой ходовой оси 2 - угол поворота, уменьшающийся до нуля, направлять движение транспортного средства косо относительно его продольного направления путем того, что для всех колес 3 устанавливается одинаковый угол поворота, или осуществлять наложение движения по кривой и косое движение. При движении на поворотах малого радиуса может быть целесообразно установить различные углы поворота для левого и правого колеса 3 одной управляемой ходовой оси 1 или 2, чтобы учитывать различные радиусы кривизны пути, проходимого этими колесами. В последующем описании будет рассмотрен случай, когда угол поворота для обоих колес 3 одной управляемой ходовой оси одинаков. Распространение данного примера осуществления на рулевое управление с различным углом поворота колес одной оси не представляет трудности для специалиста в данной области. Согласно первому примеру осуществления изобретения с микроконтроллером 11 устройства 4 рулевого управления соединен бесконтактный датчик 6 окрестности, в данном примере лазерный датчик, работающий в видимой или инфракрасной спектральной области. Датчик 6 окрестности считывает лазерным лучом лежащую перед трактором поверхность земли и создает возможность для модуля 13 обработки изображений микроконтроллера 11 на основе интенсивности отраженного принимаемого лазерного света распознавать положение трактора относительно кромки 7 обработки. В данном случае, при передней установке на тракторе режущих аппаратов 8 косилки, эта кромка 7 обработки является границей между нескошенной областью луга, которая показана заштрихованной, и областью, уже скошенной трактором. Пример выполнения датчика 6 подробно описан в патентном документе ФРГ Кроме того, датчик 9 наклона соединен с входом 5 модуля 14 определения угла поворота колес. Такой датчик 9 наклона может, например, содержать частично заполненные жидкостью сосуды и датчики для оптического или механического восприятия положения зеркала поверхности жидкости в сосудах. Подходящим является также заполненный электропроводной жидкостью сосуд с несколькими погруженными в жидкость электродами. В этом случае электрическое сопротивление жидкости между электродами изменяется в зависимости от положения зеркала поверхности жидкости. Примеры выполнения таких датчиков 9 наклона подробно описаны в патентном документе ФРГ Для окашивания луга с оптимальной эффективностью трактор должен двигаться по пути, при котором наружная кромка режущих аппаратов 8 косилки, на которой установлен датчик 6, будет точно следовать вдоль кромки 7 обработки. Если трактор отклоняется от этого пути по чертежу влево, ширина режущих аппаратов 8 косилки будет использоваться не полностью; при отклонении вправо участок луга останется нескошенным. Поэтому устройство 4 поддерживает автоматический режим рулевого управления, при котором оно управляет направлением движения трактора на основе отклонения кромки режущего аппарата косилки от кромки 7 обработки, воспринимаемого с помощью модуля 13 обработки изображений и датчика 6. В качестве примера здесь будет рассмотрен случай известного как такового пропорционально-интегрального регулирования, вначале при движении по равнине. При таком регулировании угол где a, b и с являются константами, выбранными соответствующим образом. Колеса 3 задней управляемой ходовой оси 2 постоянно удерживаются с углом Как видно на фиг.1, в данном случае угол поворота является углом между осью вращения колеса 3 и плоскостью, проходящей поперечно перпендикулярно продольному направлению транспортного средства. Возможны также другие определения угла поворота. Фиг.2 представляет кривые отклонения Если, невзирая на положения данного изобретения, использовать данный режим регулирования таким же образом при движении по склону, может создаться ситуация, показанная на фиг.3. В этом случае измеренное к началу процесса регулирования отклонение Согласно изобретению эта проблема решается за счет того, что модуль 14 определения угла поворота колес привлекает к расчету угла при этом угол
Коэффициент b пропорциональности выбран таким, что угол b Очевидно, что при исчезновении зависящих от отклонения членов уравнения углы поворота колес становятся равными, то есть Изобретение может с успехом использоваться также в транспортном средстве только с одной управляемой ходовой осью. Поскольку в этом случае угол На фиг.4 показано изменение в функции времени отклонения Согласно второму примеру осуществления датчик 6 окрестности и модуль 13 обработки изображений заменены навигационной системой 10 (см. фиг.1), например, на основе системы GPS (Global Positioning System - глобальная система навигации и определения местоположения), которая позволяет определять географическое положение трактора с высокой точностью, предпочтительно с точностью до 0,2 м и выше, и электронным записывающим устройством 15. За счет записи в записывающем устройстве 15 пути, пройденного трактором при окашивании (или любой другой обработке), модуль 14 определения угла поворота колес имеет возможность рассчитывать вытекающую из этой обработки линию кромки 7 обработки или заданный путь движения вдоль этой кромки 7 обработки, который обеспечивает экономичную обработку почвы без оставления необработанных мест. Направление трактора вдоль вычисленного таким образом пути осуществляется при использовании величины наклона В третьем примере осуществления изобретения используется навигационная система 10. Она дополнительно предназначена для того, чтобы определяемое ею географическое положение трактора увязывать с точкой на топографической карте, которая соответствует этому положению и записывается в электронном запоминающем устройстве, связанном с навигационной системой 10 и не показанном на фиг.1. На основе высотной информации, содержащейся в топографической карте, навигационная система 10 вычисляет поперечный наклон склона относительно заданного пути движения в месте нахождения трактора и передает его на вход 5' устройства 4 рулевого управления в виде сигнала, представляющего наклон Формула изобретения1. Сельскохозяйственное транспортное средство, содержащее по меньшей мере одну управляемую ходовую ось (1, 2), датчик (6, 13; 10, 13) колеи движения, предназначенный для восприятия отклонения между заданным путем движения транспортного средства и его действительным путем движения, и устройство (4) автоматического рулевого управления, выполненное с возможностью корректирующей регулировки управляемой ходовой оси (1, 2) в случае отклонения угла ( 2. Транспортное средство по п.1, отличающееся тем, что устройство (4) рулевого управления выполнено с возможностью вычислять и устанавливать угол ( 3. Транспортное средство по п 2, отличающееся тем, что содержит вторую управляемую ходовую ось (2), управляемую устройством (4) рулевого управления. 4. Транспортное средство по п.3, отличающееся тем, что устройство (4) рулевого управления выполнено с возможностью вычислять и устанавливать угол ( 5. Транспортное средство по пп.2-4, отличающееся тем, что зависящий от наклона член уравнения и угол ( 6. Транспортное средство по любому из пп.1-4, отличающееся тем, что снабжено датчиком (9) наклона, который обеспечивает сигнал, представляющий наклон ( 7. Транспортное средство по любому из пп.1-4, отличающееся тем, что датчик колеи движения содержит навигационную систему (10) для определения географического положения транспортного средства, запоминающее устройство (15) для описания заданного пути движения транспортного средства и средства (13) для восприятия отклонения между установленным положением и заданным путем движения. 8. Транспортное средство по любому из пп.1-4, отличающееся тем, что датчик колеи движения содержит датчик (6) окрестности, определяющий окрестность, и средства (13) для идентификации заданного пути движения в изображении окрестности, обеспечиваемом датчиком окрестности, и для определения положения транспортного средства относительно пути. 9. Способ рулевого управления транспортным средством, снабженным по меньшей мере одной управляемой ходовой осью (1, 2), содержащий следующие этапы:a) воспринимают отклонение ( 10. Способ по п.9, отличающийся тем, что на этапе с) угол ( 11. Способ по п.10, отличающийся тем, что угол поворота колес для второй управляемой ходовой оси (2) транспортного средства определяют в зависимости от воспринятого наклона ( 12. Способ по п.11, отличающийся тем, что угол поворота колес для второй управляемой ходовой оси (2) и член уравнения, зависящий от воспринятого наклона и независимый от воспринятого отклонения, устанавливают равными друг другу. Популярные патенты: 2279799 Балансир рыболовный ... по горизонтали и вертикали;- известное устройство дополнительно содержит металлическую штангу с петлей-застежкой для крепления крючка-тройника и фосфоресцирующими кольцами, укрепленную на корпусе.Следовательно, заявляемое устройство соответствует критерию "существенные отличия".Изобретение поясняется иллюстрациями (Фиг.1÷4). На Фиг.1 (вид сбоку) и Фиг.2 (вид сверху) показаны два вида выполнения балансира "а" и "б".1 - корпус2 - крылья3 - петля для крепления лески 4 - трейлер5 - скоба корпуса6 - скоба трейлера 7 - заводное кольцо8 - крючок-тройник9 - металлическая штанга с петлей-застежкой для крепления крючка-тройника 10 - ... 2272399 Зерноуборочный комбайн ... комбайнах способно вымолотить не более 75% зерна, поэтому для его дальнейшего выделения необходима установка длинного соломотряса, который существенно увеличивает массогабаритные характеристики комбайна и снижает его пропускную способность вследствие малой скорости движения через него обмолачиваемой массы. Комбайны аксиально-роторного типа имеют существенно меньшие массогабаритные характеристики и большую пропускную способность, однако эффективность вымолота зерна в их известных конструкциях остается недостаточно высокой, что приводит к повышенным потерям зерна.Наиболее близким по технической сущности является зерноуборочный комбайн, содержащий жатку, измельчитель и молотильное ... 2303347 Способ ведения виноградных кустов ... поврежденной морозами, ее удаляют. Основную нагрузку урожаем размещают на нижней резервной части. В то же время из сучка или порослевого побега восстанавливают первую группу структурных элементов.Недостатком известного способа формирования кустов является то, что в случае сильных зимних повреждений, он не обеспечивает быстрого восстановления поврежденных частей кустов. Формировка восстанавливается, как правило, на второй - третий год. Кроме того, значительная часть урожая в таких формировках размещена очень низко от земли, что не удовлетворяет требованиям вибрационных виноградоуборочных машин.Известен способ формирования кустов (Садоводство, виноградарство и виноделие Молдавии. ... 2446659 Способ и устройство для органического возделывания зерновых культур ... половины междурядья, с промежутком между полосами не более 10 см, или через рядок с междурядьем 20 23 см и с промежутком между полосами 20 30 см. Устройство для посева зерновых культур содержит емкости для посевного материала с двумя отделениями и двумя валами с высевающими аппаратами, общие подводящие устройства, соединенные семяпроводами сошники. При этом на одном валу установлены универсальные аппараты для высева семян зерновых культур и многолетних трав. Сошники установлены на поводках, закрепленных шарнирно на раме и подпружиненных к почве. Сошники для высева в полосу шириной не более половины междурядья установлены с междурядьем 12,5, 13, 14, 15, 16, 17, 18, 19, 20 и ... 2426302 Всепогодная теплица ... 20 могут быть изготовлены путем сборки из множества секционных частей. В ширину теплицы 1 в два ряда расположены подробно описанные далее опорные блоки 30, на которые опираются нижние концы периферийной стенки 10. Размер одной теплицы 1 составляет порядка, например, от 5 до 10 м в ширину (в поперечном направлении), от 20 до 50 м в глубину (в продольном направлении) и от 3 до 5 м в высоту. Каждая из секционных частей 11а-11с и 21 представляет собой формованное изделие из пенополистирола с 10-50-кратной степенью раздува и толщиной 10-50 см. Например, в местностях, где высота снежного покрова достигает почти 80 см, могут использоваться секционные части из пенополистирола с 20-кратной ... |
Еще из этого раздела: 2114555 Способ электродиагностики вымени крупного рогатого скота и устройство для его осуществления 2159526 Устройство для навешивания сельскохозяйственных орудий на трактор 2078495 Устройство для транспортирования кормов в хранилищах башенного типа 2232490 Машина для обработки почвы 2438304 Улей 2150193 Установка для бесфреонового охлаждения молока 2282959 Устройство для крепления навесного оборудования к транспортному средству 2444881 Конвейер для проращивания зерна 2236787 Способ испытаний опрыскивателей и устройство для его осуществления 2384052 Способ повышения эмбриональной жизнеспособности и естественной резистентности цыплят-бройлеров |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||
 ,
,  ) поворота колес управляемой ходовой оси, воспринятого датчиком колеи движения, чтобы уменьшить это отклонение. Устройство рулевого управления через вход получает сигнал, который представляет наклон (
) поворота колес управляемой ходовой оси, воспринятого датчиком колеи движения, чтобы уменьшить это отклонение. Устройство рулевого управления через вход получает сигнал, который представляет наклон ( ) поверхности, проходимой транспортным средством, в направлении поперечно заданному пути движения. Устройство рулевого управления выполнено с возможностью учета этого наклона (
) поверхности, проходимой транспортным средством, в направлении поперечно заданному пути движения. Устройство рулевого управления выполнено с возможностью учета этого наклона ( ) между заданным путем движения транспортного средства и его действительным путем движения. Воспринимают наклон (
) между заданным путем движения транспортного средства и его действительным путем движения. Воспринимают наклон (
 10208012 А1.
10208012 А1.

