Машина для обработки почвыПатент на изобретение №: 2232490 Автор: Гаджимурадов И.М. (RU) Патентообладатель: Гаджимурадов Исин Мевлютович (RU) Дата публикации: 20 Июля, 2003 Начало действия патента: 24 Июля, 2001 Адрес для переписки: 362040, г. Владикавказ, 40-е отд, а/я 63, И.М.Гаджимурадову Изображения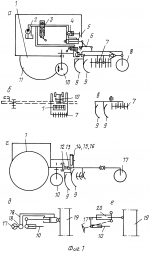 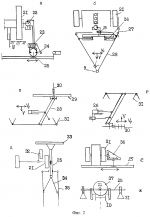 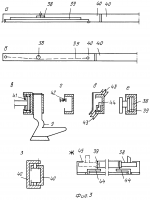 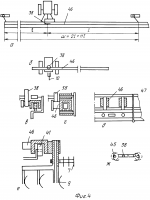 Изобретение относится к машиностроению, в частности к энергоресурсосберегающим агрегатам для земледелия. Машина содержит энергетический и технологический модули, связанные механизмом относительного поворота. Регулятор нагрузки двигателя связан с предохранителями с возможностью подачи вперед. Рабочие органы выполнены реверсивными и содержат самовращающиеся роторы для обработки почвы. Машина имеет рядное расположение рабочих органов, а также механические руки и рабочее оборудование для обработки поверхностей или перевозки и распределения материалов. Рабочие органы имеют механизм их догрузки и отрыва ходовой части от земли. Рабочие органы связаны с возможностью работы в тяговом, ведущем, толкающем, тормозном и нейтральном режимах, а также сочетания режимов с возможностью распределения энергии с учетом реакций земли, курса. Привод рабочих органов соединен с ведущим колесом с возможностью передачи энергии и отрыва колеса от земли. Диск-опора установлен с возможностью поворота и/или получения информации об отклонении от целевой траектории. Роторы-ролики смещены от лемеха в сторону залемешного пространства с возможностью вращения сопротивлением почвы или уравновешивания реакции почвы в режиме реактора-ролика заменителя полевой доски. Машина обеспечивает преобразование догружателей колес трактора в разгружатели колес и догружатели дисковых и катковых рабочих органов. Такое конструктивное выполнение позволяет повысить эффективность обработки почвы в любой зоне. 6 з.п. ф-лы, 129 ил. Изобретение относится к сельскохозяйственному машиностроению, к машинам для обработки почвы и грунтов, может быть использовано для реализации новых технологий и способов использования.Известна машина для обработки почвы, содержащая энергетический и технологический модули, механизмы реверсивного перемещения рабочих органов и управления /ЕА 199600069 А1, 30.04.1998/.Цель изобретения - повышение эффективности производства и применения с возможностью энергометаллопочвовлаго- и времясбережения в различных условиях.Поставленная цель достигается тем, что у энергетического модуля механизм навески имеет гидроцилиндр, насос, распределитель и регулятор давления в гидроцилиндре для обеспечения догрузки и разгрузки ведущих колес, при этом привод рабочих органов связан с ведущим колесом, а рабочие органы имеют разгружатель и догружатель для преобразования технологического веса и нагрузки ходовой части в технологическую силу рабочих органов.Машина имеет предохранительную муфту, выполненную с возможностью подачи сигнала механизму управления. Машина имеет объемную муфту для стабилизации нагрузки двигателя, выполненную с возможностью подачи сигнала механизму управления.Машина имеет рабочие органы, установленные с возможностью работы в ведущем, нейтральном и тормозном режимах. Машина дополнительно имеет механические руки и средства для перевозки и распределения материалов в виде сменных бункеров-контейнеров. Машина содержит диск-опору, установленный с возможностью поворота и/или подачи информации об отклонении от целевой траектории.Машина имеет роторы-ролики, смещенные относительно лемеха в сторону залемешного пространства и установленные с возможностью вращения сопротивлением почвы или уравновешивания реакции почвы в режиме реактора для выполнения функций полевой доски.Рабочие органы могут служить опорами и средствами передвижения в желаемом направлении. Сигнал предохранителя подается на вход управления с возможностью подъема, и/или подачи вперед, и/или остановки и реверса для обхода камня или иного препятствия.Энергетический и технологический модули соединены с возможностью автоматического растормаживания тяговой силой и облегчения управления. Датчик курса в виде диска связан с механизмами управления с возможностью учета курса, реакций почвы при движении в тяговом и тормозном режимах. Высокие сцепные возможности рабочих органов облегчают движение машины в различных условиях по целевой траектории.Ширину захвата машины определяют по длине хода и числу секций рабочих органов, а скорость движения задают по числу рабочих органов в секции, т.е. преобразуют принцип регулирования скорости по нагрузке в принцип технологической целесообразности.Машину используют при любой влажности почвы и в период, когда почва покрыта мерзлой коркой. При этом снижается зависимость проходимости и других эксплуатационных качеств от тягово-сцепных качеств ходовой системы энергетического модуля.Приближение энергетического модуля к технологическому и их слияние, приближение двигателя к рабочим органам - потребителям энергии и массы двигателя к опорам - рабочим органам полезно для производителя и пользователя машины, упрощает конструкцию трансмиссии, ходовой системы, привода и рабочих органов.Новизной метода использования машины в земледелии является то, что ширину захвата машин различной мощности и производительности берут одинаковой. Скорость движения машины увеличивают пропорционально числу рабочих органов секции без изменения ширины захвата. Ширину захвата берут по условиям рельефа и эксплуатации. Твердость мерзлой корки используют для повышения эффективности. Длина хода рабочих органов больше шага установки секций рабочих органов и перекрывает их. Параллельной установкой рабочих органов повышают ширину захвата и снижают скорость движения машины. Последовательной установкой рабочих органов /увеличением числа рабочих органов секции/ и скорости движения снижают ширину захвата без изменения мощности и производительности. Изменяют знак действия известного догружателя ведущих колес и массой трактора прижимают рабочие органы к земле и разгружают колеса. Движущие и тормозные силы регулируют с учетом сцепных возможностей и желаемой траектории движения преобразованием толкающей силы в тормозную и, наоборот, торможением пропорционально толкающей силе с возможностью ввода выходного сигнала обратным знаком на вход управления и движения в режиме полуагроробота применительно к внешним условиям. Качество оборота пласта при вспашке повышают снижением скорости или торможением движения вперед. Датчик курса в виде колеса или диска /дисковой батареи/ связан с механизмом управления с возможностью изменения скоростей бортов путем торможения забегающего борта или снижения торможения отстающего борта с возможностью устранения ошибки курса. Предохранители соединены с механизмом управления с возможностью обхода камня до устранения перегрузки, считая огрехи обозначением места нахождения камня. Предохранитель выполнен в виде датчика силового регулирования и стабилизации нагрузки двигателя. Предохранитель содержит указатель нагрузки и сигнализатор о перегрузке /на схеме не показано/.В графической части даны много вариантов средств: на фиг.1а - схема разгружателя колес, на фиг.1б - схема транспортного положения и догружателя колес, на фиг.1в - схема плуга и дисков-преобразователей веса в технологически полезную силу крошения комков, на фиг.1г - схема механического разгружателя колес, на фиг.1д - схема средства поворота, на фиг.1е - схема средства механической связи, на фиг.2а - схема гидропривода рабочих органов от колес энергосредства, на фиг.2б - схема гидропривода рабочих органов и колес для подачи вперед, на фиг.2в - схема привода рычагов и рабочих органов на заднем конце, на фиг.2г - схема привода рабочих органов на переднем конце, на фиг.2д - схема привода рабочих органов продольного и поперечного ходов от звездочки колеса, на фиг.2е - схема привода рабочих органов от редуктора колеса, на фиг.2ж - схема электропривода рабочих органов, на фиг.3а - схема цепного привода, вид сверху, на фиг.3б - схема привода, вид сзади, на фиг.3в - привод, вид сбоку, на фиг.3г - схема ролика-опоры, на фиг.3д - схема установки роликов и мостиков цепи, на фиг.3е - схема ролика и звездочки, на фиг.3ж - схема шарниров секций, на фиг.3з - положения роликов звездочки и мостиков для реверса, на фиг.4а - схема реечного привода, на фиг.4б - схема привода, вид сзади, на фиг.4в - схема реечного привода, вид сбоку, на фиг.4г - схема привода, вид сбоку, на фиг.4д - схема рейки, на фиг.4е - схема дисков, на фиг.5а - схема предохранителя - силового регулятора-стабилизатора нагрузки, на фиг.5б - схема объемной муфты - силового регулятора-подъемника рабочих органов, на фиг.5в - схема фиксатора защиты лап, на фиг.5г - схема фиксатора защиты плуга, на фиг.5д - схема фиксатора и пружины настройки, на фиг.5е - схема фиксатора секции плуга, на фиг.5ж - схема фиксатора культиватора, плоскореза, на фиг.5з - схема подъема силой тяги, на фиг.5и - схема секции плоскорезов, на фиг.5к - схема дисковой батареи, на фиг.5л - схема секции самоподъема и самозаглубления, на фиг.6а - схема ролика-отвала плуга, вид сбоку, на фиг.6б - схема ролика-отвала плуга, вид сверху, на фиг.6в - трубчатая стойка, на фиг.6г - схема наклона стойки, на фиг.6д - схема самовращающихся роликов за отвалом, вид сбоку, на фиг.6е - схема ролика, вид сверху, на фиг.6ж - схема ролика-ротора, вид сверху, на фиг.6з - схема вращения роторов, вид сбоку, на фиг.6и - схема реверсивного ролика, вид сбоку, на фиг.6к - схема ролика, вид сверху, на фиг.6л - схема сочетания плуга и сошников, на фиг.6м - схема плоскорезов, на фиг.6н - схема плоскорезов и ограничителей настройки, на фиг.7а - схема плуга с подплужником, на фиг.7б - схема подплужника, на фиг.7в - схема реверсивного плуга, на фиг.7г - схема плуга с диском, на фиг.7д - схема самоуравновешивания, на фиг.7е - схема самоуравновешивания при обратном ходе, на фиг.7ж - схема самоуравновешивания агрегата, на фиг.7и - схема уравновешивания оборотного плуга подплужниками, на фиг.7к - схема уравновешивания роликами, на фиг.7л - схема уравновешивания роликами в нетормозном режиме, на фиг.7м - схема уравновешивания при обратном ходе, на фиг.8а - схема ряда рабочих органов, на фиг.8б - схема подачи и реверса на краю прохода, на фиг.8в - схема самовращающегося ролика плуга, на фиг.8г - схема четырехлезвийного рабочего органа, на фиг.8д - схема четырехлезвийного рабочего органа при обратном ходе, на фиг.8е - сечение плужка-струга, на фиг.8ж - схема шарниров, на фиг.8з - схема ограничителей самоповорота, на фиг.8и - схема сочетания самоповоротных рабочих органов, на фиг.9а - схема подачи и реверса, на фиг.9б - схема реверса и подачи на другом конце, на фиг.9в - схема подачи и самоповорота, на фиг.9г - схема подачи ряда рабочих органов, на фиг.9д - схема сочетания и рядной подачи рабочих органов, на фиг.9е - схема подачи на узкой полосе, на фиг.9ж - схема подачи плуга и дисков, на фиг.10а - схема настройки плоскорезов /в - ведущий, Т - тормозной/, на фиг.10б - схема кинжала-плоскореза, на фиг.10в - схема секции кинжалов-плоскорезов, на фиг.10г - схема поворота плужка, на фиг.10д - схема шарниров плужка, вид сбоку, на фиг.10е - схема плуга с реактором, на фиг.10ж - схема реакторно-роликового плуга, на фиг.10з - схема положений реактора при обратном ходе, на фиг.10и - схема реактора, вид сбоку, на фиг.10к - схема плуга с самоповоротным и самопереставляемым роликом, на фиг.10л - схема плуга с двумя роликами самоуравновешивания, на фиг.10м - схема плуга реверсивного хода, на фиг.11а - схема экрана-камеры, на фиг.11б - схема ловителя жуков, на фиг.11в - схема огнемета и брандспойта огнетушителя, на фиг.11г - схема брандспойта, на фиг.11д - схема платформы, на фиг.11е - схема самосмещения колес и катков, на фиг.11ж - схема платформы из шин-утиля, на фиг.11з - схема привода тормозов, на фиг.11к - схема платформы на шинах из утиля без камер, на фиг.12а - схема контейнера, на фиг.12б - схема контейнера с шаговым транспортером, на фиг.12в - схема подъема контейнера руками, на фиг.12г - схема контейнера на опорах, на фиг.12д - схема контейнера, вид сзади, на фиг.12е - схема контейнера на санях, на фиг.13а - муфта - средство подачи, на фиг.13б - схема планетарного механизма подачи, на фиг.13в - схема планетарного редуктора с тормозами регулирования подачи, на фиг.13г - схема толкателя подачи, на фиг.13д - схема толкателя подачи, на фиг.13е - схема гидропривода подачи, на фиг.13ж - схема упоров подачи, на фиг.13з - схема изменения подачи упором, на фиг.13и - схема подачи колесом от орудия, на фиг.13к - схема подачи плугом, на фиг.13л - схема регулирования подачи гибкой тягой и упором, на фиг.13м - схема подачи гидромашиной, на фиг.13н - схема работы реакторов, на фиг.14 - показатель работы для выбора режимов, на фиг.15 - показатели для выбора режима преобразования массы/силы тяжести в технологически полезную силу догрузки рабочих органов, на фиг.16а - схемы закономерного изменения параметров работы в тормозном, холостом, тяговом и приводном режимах, на фиг.16б - закономерная зависимость сил, глубины и ширины, на фиг.16в - влияние сил торможения и толкания, на фиг.16г - схема влияния сопротивления на скорость подъема и работы, мощность и фрикциона, на фиг.16д - схема стабилизации нагрузки и защиты, силового регулирования, подъема и обхода препятствия, на фиг.16е - схема влияния скорости движения агрегата на производительность по площади и кратности повторения функций за один проход с выполнением многих операций до финишной обработки, на фиг.17 - схема выборов параметров агрегата в зависимости от ширины захвата, мощности одного рабочего органа ИI, числа рабочих органов П, на фиг.18а - номограмма выбора числа рабочих органов, ширины захвата и скорости движения агрегата по числу секций, по ходу и ширине, на фиг.18б - номограмма параметров ряда модулей различной мощности и производительности по мощности одного рабочего органа в зависимости от производственных условий, совмещения и повторения функций технических средств режимных реверсивных, самоустанавливающихся рабочих органов для выполнения и повторения различных технологических процессов и операций без дополнительных рабочих органов и проходов агрегата по полю. Схемы соответствуют решению проблем ширины захвата, скорости движения, защиты человека, техники и среды, экологии и эргономики. Все названия указывают на их работу, а буквы - на вариантность выполнения конструкции или выбора параметров.Машина содержит энергомодуль 1 /фиг.1, 2/, насос 2, распределитель 3, регулятор 4 давления в гидроцилиндре 5 механизма навески 6 и имеет режимы догрузки и разгрузки, по настройке, рабочих органов 7, катков 8, плугов 9 и дисков 10 для преобразования массы и нагрузки колес 11 в технологически полезное действие - уравновешивание сил и масс рабочими органами - полезную силу обработки земли. Энерго- и технологические модули шарнирами 12, 13 и приводом 14 рабочих органов 15 и их секций 16 сочленены с возможностью относительного поворота рулем 17, 18 или по сигналу диска 10 - датчика модуля 19 или тягой 20 в режиме полуагроробота - одноосного трактора.Привод рабочих органов от колеса 21 /фиг.2/ имеет насос 22, распределитель 23, гидромотор, цевочное зацепление 25 с рейкой перемещения рабочих органов. Гидропривод 26 толкателем 27 и рычагами 28 может толкать колеса 21. Толкатель 29 с диском 30 уравновешивателя сил рабочих органов 31, а также катки 32 разгрузки колес 1, 21 допускают отрыв их от земли, перемещение бульдозера 33, а рычагами 34, 35 и рабочих органов возвратно-поступательно.Механический отбор мощности от колеса редуктором 36 допускает привод рабочих органов от автомобиля без спецвала отбора мощности.Привод рабочих органов от электродвигателя 37 /фиг.2/ снижает или устраняет потребность в тракторах и сложных энергомодулях, но транспортировки на буксире или другими известными методами и привязка к линии усложняет применение.Энергосредства фиксируются и удерживаются в заданном положении на склонах стабилизирующим моментом широкозахватного технологического модуля. Относительный поворот модулей в режиме полуагроробота возможен рулем и по сигналу диска-датчика 10 с возможностью ввода выходного сигнала обратным знаком на вход управления.Звездочка 38 /фиг.3 а, б/ непрерывного вращения в одном направлении связана с цепью 39 секции 40 с рабочими органами на направляющих роликах 41, 42, 43 /фиг.3в,г,д,е,ж,з/ для реверсивного хода и прохода около мостиков 44 и упоров 45, огибания рейки 46 по направляющей 47 /фиг.3а,б,в,г,д,е,ж,з/ для изменения направления /реверса/ хода. Длину хода рейки можно регулировать установкой секции 47.Предохранительная муфта 48 /фиг.5а/ тягой 49 с пружиной составляют датчик нагрузки и через регулятор 50 может поднять рабочие органы 51 /опустить колеса 52/, стабилизировать нагрузку. Аналогично объемная муфта 53 /фиг.5б/ может регулировать высоту лопаты 54 и стабилизировать нагрузку двигателя, выглубляя при перегрузке, предохранить от поломки, подавая выходной сигнал обратным знаком на вход управления, автоматически управлять машиной по принципу силового регулятора без отбора энергии.Фиксаторы 55 /фиг.5/ защиты плоскорезов 56, плуга 9 с пружиной 57 и гайкой 58 настройки, регулятор 59 высоты приложения силы, зубья 60, ограничители 61 могут предохранить от перегрузки выглублением известным способом. Дисковая батарея 62 тягой 63 заглубляет плуг 9 после подъема около камня. Плуг 9 /фиг.6а, б/ имеет ролик-отвал 64 на самоповоротной между ограничителями оси. Трубчатая стойка 65 /фиг.6в,г,д,е,ж/, ролики 66 за лемехами 67, с зубьями 68 могут вносить материалы в почвы, выкапывать клубнеплоды при установке за копающими лемехами 69. Ролик 70 может вращать ротор 66. Плуги 71 /фиг.6и,к,л,м,н/ с роликами 72 автономно или с дисками 73 и сошниками 74, плоскорезами 75 на осях поворота между ограничителями 76 могут перемещаться в ведущем, тормозном и нейтральном режимах, как это обозначено буквами В,Т,Н. Избыточную движущую силу снижают самоуравновешиванием корпуса 77 с подплужниками 78 противодействия толкающей силе отвала /фиг.7а,в,г,д,е,ж/ при дистанционной работе и большой длине механической руки на опасных участках /в огне, воде/. Оборотный плуг /фиг.7и,к,л,м/ из корпусов 79 с подплужниками-почвоуглубителями на дышле 80 могут перемещаться и поворачиваться тягами 81 и гидроцилиндром 82 между ограничителями с возможностью работы в тормозном режиме при малой ширине захвата Шторм или перемещаться аналогично плугу 83 в различных режимах, уравновешивая силы роликами-реакторами 72 при поперечном перемещении вправо и влево, вперед и назад без подплужников и полевых досок.Рабочие органы 9 на рычаге 84 и тягой 85 /фиг.8/ реверсивного поворота, шарнир 86 и рычаг 87 могут поворачивать рабочие органы для действия лезвиями 88 с трех или четырех сторон при плоскопараллельном перемещении шарнирами 89 после поворота между ограничителями 90, 91 поворота рабочих органов 9 с роликом или без него. Ограничители 92 допускают поворот рабочего органа силой привода. Рядное расположение рабочих органов /фиг.9/ допускает подачу вперед по борозде или узкой полосой с возможностью снижения перекрытия обработок.В сухом земледелии для обработки почвы плоскорезами 31 и их заменителями 93 /фиг.10/ в ведущем В или тормозном Т и нейтральном Н, при их сочетании или отвалами 94, плугами 9 с роликами 95 - реакторами уравновешивания без полевых досок, с двумя роликами-реакторами 96 или самопереставляемым роликом в различных режимах возможно плоскорезами 31 с быстросъемными роликами 72.Машина содержит сменные рабочие органы 96, 97 - экран /фиг.11/ для крашения, побелок, химобработки, эластичные ролики 98 и встряхиватели 99 жуков; огнемет 100 против саранчи /огнетушитель/, брандспойт 100, катки с платформой 101 на колесах 102 и поворотных осях, руки - дышла 103 или гидроцилиндр 104, одинаково управляющих тормозной колодкой 105 колес. Здесь колеса 102 без камер /из утиля/ более прочны. Механические руки 106 могут перевозить контейнер 107 /фиг.12/ со штанговым транспортером или транспортер с граблинами 108 и ограничителями 109 для разгрузки материалов /удобрений и т.д./ гидроприводом 110 и гидроподъемником 111 контейнеров 112, цистерн с ногами 113 и санями 114 для зимней перевозки.Для подачи рабочих органов вперед в зависимости от типа энергосредства содержит какой-нибудь толкатель или муфта 115 /фиг.13/, планетарный механизм с тормозами 116, аналогичный механизму поворота, планетарный редуктор 117 с тормозами 118, гидроцилиндр 119 с толкателем 120, упорами 121, 122, 123, регуляторами подачи V по плечу X, тормозок 124, рейка 125 колеса 126, тросом-подтягивания 127 к трактору, гидропривод 2, ролики 96.Многообразие вариантов исполнения компонентов машины соответствует требованиям различных типов тракторов, автомобилей и других источников энергии, а также условиям работы с возможностью преобразования веса энергосредства в технологическую силу давления на диски и катки, предотвращения бокового протаскивания, сползания и опрокидывания очень легкого мощного энергомодуля в случае исполнения машины с одной рукой. Это допускает их работу в качестве почворуля, датчика курса, привод рабочих органов от механического или гидравлического средства и электропитание. Возможность привода рабочих органов от колес устраняет необходимость в вале отбора мощности /усложнении трансмиссии/ и тракторе при использовании любого автомобиля для обработки земли. Большое разнообразие сменных рабочих органов допускает выбор с учетом местности и сочетание в соответствии с совместимостью операций от вспашки до финишной обработки за один проход, а также многократное повторение работ за один проход без дополнительных рабочих органов многоследного типа. Многорежимность рабочих органов допускает получение и применение движущей силы без участия колес трактора, без трактора, с автомобилем и без него и установкой любого двигателя /теплового, электрического/ на технологическом модуле, транспортируемого до поля самоходной машиной или приводом колеса от привода рабочих органов для подачи и транспортировки по полям и дорогам. Машина содержит общеизвестные средства для привода рабочих органов, настройки хода, поворота, подачи вперед, подъема колес и управления.Машина работает следующим образом.От энергомодуля 1 /фиг.1 с подпунктами/ гидравлическим 2 или механическим 14 приводами перемещаются рабочие органы 7, 9, 31, 64, 72, 77, 88 (фиг.1-8 с подпунктами), выполняют соответствующие их назначению работы. В конце каждого хода в зависимости от настройки поворачиваются, подаются вперед и возвращаются обратно. Масса энергомодуля 1 дисками и катками передается почве и устраняется балласт. Цепная или реечная передача /фиг.3, 4 с их элементами по пунктам/ преобразует вращение звездочки 38 вала, колеса, мотора в зависимости от варианта исполнения в возвратно-поступательное перемещение рабочих органов. При перегрузке и встрече с камнем муфта 48, 53 или предохранители /фиг.5а,б,в,г,д,е,ж,з,и/ выглубляет, останавливает и защищает поломки и подает сигнал для обхода камня подъемом, подачей.Диски 10 около или под энергомодулем воспринимают массу и предотвращают боковое сползание и опрокидывание, обеспечивают относительный поворот модулей 1 и 19 при формировании траектории и использовании сигнала дисков-датчиков курса. Насос 22 отбора мощности от колеса и гидромотор 24 приводят рабочие органы 9, 31. Аналогичное действие гидроцилиндров 26, рейки 25 и шатунов 34 рычагов 35, редуктора 36 или электромотора 37, или звездочки 38 цепи 39, или рейки 46 предусматривает использование сигнала предохранительной муфты 48 для изменения гидроцилиндром 50 высоты рабочих органов 51 и колеса 52 силового регулирования. Объемная муфта 53 пропорционально нагрузке и давлению поднимает лопату 54, опуская колесо 52, стабилизирует нагрузку двигателя и защищает от поломки. Предохранение от перегрузки и поломки фиксаторами 55 или подъемной тягой 63 осуществляется с возможностью заглубления и подачи вперед - с возможностью обхода камня. Компоненты машины совершают работу, соответствующую их названию, роторы 64 - ролики служат отвалами и крошат почву лучше за счет их вращения сопротивлением почвы без дополнительного привода. Возможно вращение роликов 66 в почве сопротивлением и роликом 70.Рабочие органы 71 с роликами 72, плоскорезы 75 самоповорота между ограничителями 76, плуги 77 с подплужниками 78 в тормозном режиме на оборотном плуге 79 оборачиваются тягами 81 и гидроцилиндром 82 для получения ровной вспашки в тормозном режиме малой шириной захвата Шторм и в ведущем и нейтральном режимах /фиг.7/ с возможностью рядного расположения и подачи вперед, как это показано на фиг.8, 9. Сила привода в шарнире с люфтом 86 поворачивает рычаг 87 и рабочие органы 9 между ограничителями 91 и поочередно работает лезвиями 88 при перемещении вправо и влево, а в конце хода ряд рабочих органов легко подается вперед по борозде или следу первого в ряду рабочего органа, снижая потребность в увеличении перекрытия проходов. Это устраняет обезображивание края прохода. Пропорционально снижению подачи рабочих органов снижается производительность по площади, возрастает кратность /повторность/ обработки за один проход без дополнительных рабочих органов. Эту работу облегчают перемещения плоскорезов 31 и 93, а также плугов с роликами 72 в ведущем (В), тормозном (Т) и нейтральном (Н) режимах /фиг.6, 7, 10, 11/.При движении рабочих органов 97, 98, 99, 100, 101, 102, 103 с тормозами 104, 105 обрабатывается поверхность поля химическими веществами, собираются, смываются или сжигаются саранча и другие вредители, крошатся комки или перевозятся материалы и выгружаются транспортерами (фиг.12) с возможностью остановки бункера-контейнера на опорах 113 или перевозки на санях 114 /фиг.12а,б,в,г,д,ж,з,и,к/.Подача вперед в конце поперечного хода рабочих органов муфтой 115, планетарными механизмами 116, 117, гидроцилиндрами 119, толкателем 120, упорами 121, 122, 123, рейкой 125 и колесами 126, тросом подтягивания 127 происходит при работе без повторения операций и с повторением при движении с малой скоростью непрерывно путем включения ходоуменьшителя в зависимости от подпунктов фиг.8, 9, 13.Согласование движущих и тормозных сил облегчает подачу и работу.Рабочие органы 7, 10 дискового типа служат опорами и средствами передвижения в нужном направлении лучше, чем ходовая часть, преобразуют вес трактора в технологическую силу, устраняют балластоперевозку при лущении и других финишных операциях. Аналогичная разгрузка колес и гусениц трактора и догрузка лопаты грейдера или бульдозера снижает тяговую силу ходовой части до нуля, повысив технологическую силу. Такая функциональная противоположность устраняет вредное действие ходовой части, потребность в осушении почвы и ожидании образования твердой корки. В любой зоне на всех операциях почвообработки сцепление рабочих органов с почвой, включая глубину и ширину, многократно превосходит сцепление колес и гусениц, а возможность отрыва ходовой части от земли путем догрузки рабочих органов устраняет потребность в тракторах, многократно улучшает эксплуатационные качества машин /экономичность, производительность, проходимость, управляемость, устойчивость курса и положения, безопасность, экологичность, плавность хода, автоматизируемость вождения и управления режимами работы/.Рабочие органы и ходовая часть воздействуют на землю по закону распределения энергии с учетом реакций, сопротивлений, курса и ширины захвата. При этом избыточная движущая сила открывает новые возможности совмещения операций без ограничения ширины захвата.Защите рабочих органов от поломки при встрече с камнем способствуют:1. Снижение масс энергомодуля, скоростей, кинетической энергии, сил тяжести и тяги /фиг.14/.2. Муфты-датчики нагрузки и предохранители приводов путем остановки и выглубления гидролинии подъема рабочих органов при перегрузке.3. Установка фиксаторов, упругих ограничителей и стоек /фиг.5/.4. Преобразование сопротивления в подъемную силу /фиг.5, 16/.5. Остановка агрегата по сигналу натяжения нити контура защиты при встрече с препятствием и подача сигнала. Очень часто одна защита достаточна, но простота допускает сочетание методов защиты.Для минимизации запаздывания защиты рабочих органов от перегрузки и поломки, ускорения подъема и снижения потребности в регулировании нагрузки двигателя сопротивление перемещению рабочих органов согласована с подъемной силой муфтой объемной и предохранительной, регулятором высоты приложения силы. При этом команда или сигнал “подъем” реализуется за счет замедления рабочих органов малой массы /по сравнению с массой трактора и машины-тормоза/ и переключением потока энергии от привода /перемещения/ к подъему рабочих органов. Человек такой командой быстро подает воздействие на тормоз /фиг.16/.Нагрузка двигателя стабилизируется предохранительной и объемной муфтами /фиг.5/, сигнал или сила которых дает информацию о нагрузке для энергооценки машин и местности /мониторинга/. Этот сигнал и сила используются для регулирования сопротивления /силового регулирования машины с реверсивными рабочими органами/, а при перегрузке /встрече с камнем/ - для реверса и подачи вперед. Этому сопутствует остановка рабочих органов приводом поперечного хода. Все эти действия однозначно защищают рабочие органы и повышают эксплуатационную надежность. Снижение нагрузки колес в 10-20 раз соответственно повышает надежность и энергомодуля /фиг.13-16/.Улучшают динамику машины и реверсивность, оборотность, многорежимность, саморегулируемость положения и нагрузки, самовыглубляемость при встрече с камнем, преобразуемость массы в технологически полезную силу, повторность работы.В динамике реверсивные рабочие органы 7, 8, 10, 30, 50, 61, 62, 66, 70, 72, 73, 95, 102 с упорами 121, 122, 123, колесами 8, 21, 32, 50, 52, роликами 64, 66, 68, 70, 72 выполняют соответствующие названию функции и реализуют законы /фиг.14-18/ без сложных энергомодулей и склоноходов, снижают скорость в 10 раз.Диски 7, 10 преобразуют технологический вес машины и нагрузку ходовой части в технологическую силу рабочих органов.Разгрузка ходовой части, при большой ширине захвата и дистанционной работе, изменение ширины захвата пропорционально числу и ходу секций рабочих органов, возможность работы при высокой влажности, распределение энергии между потребителями с учетом реакций земли и курса преобразуют методы обработки рисового поля, работу в воде, под и над водой при очистке, добыче материалов, формировании дамбы и дорожного полотна, обработке склонов и неудобиц, снегозадержании, запашке снега при вспашке и другой обработке земли в засушливой зоне и изменении агросроков с учетом высоких показателей проходимости, управляемости и др. эксплуатационных качеств. Мерзлая корка почвы легко крошится подъемной силой нижнего слоя, где лемех работает в зоне спелости почвы /готовности к механической обработке/. Глубина промерзания и обработки почвы легко определяется. Это расширяет сроки обработки. В теплой зоне, где нет морозов, спелость регулируется поливом в период достатка и избытка воды. Совмещение полива с обработкой преобразует методы обработки земли и применения машины с возможностью совмещения борозд для полива с базовой линией автовождения при малой скорости движения. Снижение нагрузки колес облегчает автовождение по сигналу колеса-датчика.Различие свойств почвы до и после обработки, площадь и глубина характеризуют функции. При обработке спелой почвы кратность обработки многократно снижается. Разгрузка колес облегчает обработку “спелой” почвы даже без трактора, рано весной, когда испарение ниже и осушение не требуется, прохлада, отсутствие запыленности и факторов загрязнения, низкая напряженность управления рулем и трансмиссией, самозащита рабочих органов и их самоочистка в конце хода /на краю прохода/, воздействие шинами без камер /утилем/ на почву и другие качества приближают работу к режиму более полезного полуагроробота применительно к внешним условиям /фиг.12-16/.Силы трения и сцепления между частицами почвы, сопротивление сдвигу, плотность, осушенность, напряжения, деформация и другие свойства почвы как среды воздействия ходовой части не соответствуют требованиям растений и с повышением влажности и биоспелости почвы снижают проходимость до нуля. Функции почвы как места работы трактора отличаются от функций плодородия. Рабочие органы при очень малом уплотнении почвы в ведущем и нейтральном режимах могут создать условия для роста растений и улучшения плодородия почвы, комплексно решая сопутствующие проблемы металло-, энерго-, почво-, влаго- и времясбережения путем замены технологий почвоосушения обработкой влажной холодноспелой почвы. Это исключает осушение до выхода в поле /до повышения проходимости тракторов/, укладку сухой твердой корки на дно борозды, выворачивание нижнего влажного слоя вверх в теплое время и осушение его, крошение глыб дополнительной обработкой. Вспашка /осушающая/ в сухом земледелии поэтому заменяется плоскорезной обработкой, теряются достоинства оборота пласта.Вспашка влажной почвы в холодное время создает условия для энерго-, влаго-, почво-, ресурсо- и времясбережения путем запашки влажной, готовой к обработке почвы с кристалической влагой в виде снега и льда при малой твердости и липкости. Это снижает смыв почвы, температуру нижнего слоя, всхожесть сорняков, возможность их роста, а черная земля сверху больше нагревается, становится скважистее и быстрее достигается биоспелость. Такая влагосберегающая вспашка становится альтернативой плоскорезной обработке, а снижение тягового сопротивления /нагрузки колес/ ведущими рабочими органами решает задачу проходимости без потерь влаги и времени до образования твердой корки. Мерзлая корка при малой глубине промерзания и нагрузке колес в режиме подталкивания плугом и другими орудиями, сочетание холодоспелости или спелости после полива в теплой зоне с малой или нулевой силой тяги является прорывным путем /фиг.14/.Приближение ведущих и тормозных рабочих органов или их совмещение упрощает конструкцию и управление. При соединении энергомодуля с транспортным модулем для перевозки бункеров, контейнеров энергию нужно распределять между колесами и осями с учетом реакций и курса. Смещение точки приложения движущих сил вперед от центра сопротивления, точки приложения сил торможения назад от центра тяжести является условием безопасности. Замедления тягача и прицепа /технологической машины для транспортного процесса/ могут отличаться в случае изменения их относительного положения. В целом агрегате сила сжатия сцепки /дышла, руки/ пропорциональна толкающей силе, поворот пропорционален разности сил бортов, т.е. сцепка /фиг.11, 12/ /рука/ является датчиком сил взаимодействия и изменения курса. По сигналу сцепки регулируются силы тяги и торможения и разность скоростей бортов. При установке опор 113 - полупроводников движения /исключает откат назад, при заднем ходе нужно поднять/ сцепление колес теряет значение. Для устранения увода от целевой траектории при торможении, разгоне и движении-стабилизации курса энергию нужно распределять между колесами и другими движителями с учетом траектории. Такой закон распределения составляет основу согласования работы приводов колес и тормозов тягача и прицепа на транспорте или между рабочими органами при обработке земли. Здесь энергия торможения колеса пропорциональна силе воздействия на поверхности трения. Поэтому силы управления тормозами бортов должны соответствовать курсу. Одинаковое торможение бортов возможно при прямолинейном движении без крена и одинаковом нагружении бортов. Если тягач и прицеп имеют одинаковые ускорения и замедления, то сцепка-датчик дает нулевой сигнал. Это свидетельствует о нормальном их взаимодействии в тяговом и тормозном режимах. Если замедления отличаются в пределах люфта дышла /сцепки/, то дает сигнал для коррекции сил. Увод требует коррекцию сил торможения в сторону устранения его.Ширина захвата Ш (фиг.14, 17), буксование Б, вес агрегата G и ходовой части GX, производительность W, тяговый КПД  Т, число машин ПM, их сумма Т, число машин ПM, их сумма  , экономический и экологический ущерб Э в виде произведения веса G на буксование Б, кинетическая энергия Е, тормозной путь ST зависят от сил тяги трактора Р и рабочих органов РС. При переводе рабочих органов из тягово-тормозного режима в толкающий (фиг.15) массы трактора m и ходовой части mX снижаются соответственно до m’, m’X, скорости V до V’, количество движения mV, mVa до mVT, кинетическая энергия Е до Е1.Мощность двигателя Ne привода NBOM, расход топлива СT, силы тяги РC и торможения РT, передаточное число iT трансмиссии, сила подъема РП и сопротивления РC, глубина хода h регулируются по сигналу хода рейки Х насоса дизеля (фиг.16а,б,в) или ограничиваются для стабилизации. Ширина ШP и скорость рабочих органов VP и агрегата V, силы торможения трактора Р1T толкающей силой РT и скорость подъема VП сопротивлением РC влияют на стабилизацию нагрузки NBOM по сигналу предохранительной муфты МФ путем обхода, подъема и остановки рабочих органов. Стабилизация нагрузки, устраняя перегрузку, защищает привод и рабочие органы.Производительность по площади и кратности обработки WП, WКП настраиваются изменением подачи /скорости движения/. При этом глубина и ширина рабочих органов изменяются в сторону устранения перегрузки и недогрузки без сложных трансмиссий, а скорость настраивается с учетом технологической потребности и качества обработки без строгой корреляции с нагрузкой трансмиссии и ходовой части, как это принято в тягово-транспортном режиме.Число рабочих органов в секции i не влияет на ширину захвата Ш агрегата и имеет положительную корреляционную связь со скоростью движения (фиг.17, 18). Одинаковая ширина захвата при любом числе секций и рабочих органов П облегчает выбор энергомодулей и облегчает создание унифицированного ряда машин различной мощности.Реечный привод реверсивных рабочих органов от гидромеханического отличается тем, что при изготовлении и использовании необходимо соблюдать правила, требования и условия /фиг.2-5/:1. Рейки и направляющие ролики в вертикальной плоскости допускают привод от редуктора /вала отбора мощности/ без конических шестерен с вертикальным перемещением звездочки на величину диаметра.2. Направляющие планки реек смещаются до устранения контакта с роликами с двух сторон /блокировки вращения роликов/. Направляющие рейки из дерева и резины снижают шум качения роликов.3. Две опоры рейки допускают работу без колес-опор рабочих органов. Одна звездочка и две планки требуют опору /колесо, диск/ около рабочих органов.4. Одна звездочка перемещает рейку в обе стороны и реверсирует ход проходом через просвет, смещает агрегат без поворота /после подъема дисков/. Другая рейка в противофазе движется звездочкой.5. Активная длина рейки и ход рабочих органов регулируется при настройке изменением числа секций. Рейку можно сложить маневрированием и фиксировать стопорами при транспортировке и работе в поле.6. Ширину захвата можно регулировать поворотом рейки и изменением числа секций.7. Отбор мощности от двигателя или колес может быть механическим, гидравлическим и гидромеханическим. Приводом можно и агрегатировать.8. Машину в транспортное положение можно перевести гидроподъемником, приводом и упором, поворотником рабочих органов и рейки и другими средствами компактирования.9. Одна рейка с дисками противосползания достаточны для работы.10. Переключение догружателя ведущих колес в режим разгружателя устраняет потребность в колесах и уплотнение почвы в колее.11. Диски-опоры - датчики-уравновешиватели разгружаются подъемом.Технико-экономическая эффективность от применения машины для обработки земли заключается в повышении эффективности использования металла, энергии, земли, влаги, времени и человеческого фактора, а также защиты человека, техники и окружающей среды. Преобразование массы трактора или иного энергетического средства рабочими органами-опорами и средствами передвижения в нужном направлении, регулирование нагрузки и тягового класса без изменения массы, уменьшение функций ходовой части трактора, составляющей 60-80% материала, и теряющей много энергии и причиняющей ущерб почве буксованием и уплотнением, открывает новое направление решения проблем: экономики производства и применения машины, повышения производительности, экономичности, безопасности, управляемости, устойчивости против опрокидывания, работоспособности на пересеченной и влажной поверхностях, дистанционного выполнения работ в опасной зоне /фиг.14-18/, исключения потребности в тяговой силе и зависимости от влажности. Возможность работы в воде и повторения работ без дополнительных проходов в любое время года и другие достоинства позволяют комплексно решать задачи обработки грунтов и других материалов в многих отраслях.Возможность использования автомобиля, теплового и электрического двигателей и любого трактора на обработке почвы и грунтов без буксования устраняет потребность в дорогостоящих типажах тракторов и системах машин для различных зон и решает проблемы жизнеобеспечения и качества жизни всех производителей техники и продукции земледелия. , экономический и экологический ущерб Э в виде произведения веса G на буксование Б, кинетическая энергия Е, тормозной путь ST зависят от сил тяги трактора Р и рабочих органов РС. При переводе рабочих органов из тягово-тормозного режима в толкающий (фиг.15) массы трактора m и ходовой части mX снижаются соответственно до m’, m’X, скорости V до V’, количество движения mV, mVa до mVT, кинетическая энергия Е до Е1.Мощность двигателя Ne привода NBOM, расход топлива СT, силы тяги РC и торможения РT, передаточное число iT трансмиссии, сила подъема РП и сопротивления РC, глубина хода h регулируются по сигналу хода рейки Х насоса дизеля (фиг.16а,б,в) или ограничиваются для стабилизации. Ширина ШP и скорость рабочих органов VP и агрегата V, силы торможения трактора Р1T толкающей силой РT и скорость подъема VП сопротивлением РC влияют на стабилизацию нагрузки NBOM по сигналу предохранительной муфты МФ путем обхода, подъема и остановки рабочих органов. Стабилизация нагрузки, устраняя перегрузку, защищает привод и рабочие органы.Производительность по площади и кратности обработки WП, WКП настраиваются изменением подачи /скорости движения/. При этом глубина и ширина рабочих органов изменяются в сторону устранения перегрузки и недогрузки без сложных трансмиссий, а скорость настраивается с учетом технологической потребности и качества обработки без строгой корреляции с нагрузкой трансмиссии и ходовой части, как это принято в тягово-транспортном режиме.Число рабочих органов в секции i не влияет на ширину захвата Ш агрегата и имеет положительную корреляционную связь со скоростью движения (фиг.17, 18). Одинаковая ширина захвата при любом числе секций и рабочих органов П облегчает выбор энергомодулей и облегчает создание унифицированного ряда машин различной мощности.Реечный привод реверсивных рабочих органов от гидромеханического отличается тем, что при изготовлении и использовании необходимо соблюдать правила, требования и условия /фиг.2-5/:1. Рейки и направляющие ролики в вертикальной плоскости допускают привод от редуктора /вала отбора мощности/ без конических шестерен с вертикальным перемещением звездочки на величину диаметра.2. Направляющие планки реек смещаются до устранения контакта с роликами с двух сторон /блокировки вращения роликов/. Направляющие рейки из дерева и резины снижают шум качения роликов.3. Две опоры рейки допускают работу без колес-опор рабочих органов. Одна звездочка и две планки требуют опору /колесо, диск/ около рабочих органов.4. Одна звездочка перемещает рейку в обе стороны и реверсирует ход проходом через просвет, смещает агрегат без поворота /после подъема дисков/. Другая рейка в противофазе движется звездочкой.5. Активная длина рейки и ход рабочих органов регулируется при настройке изменением числа секций. Рейку можно сложить маневрированием и фиксировать стопорами при транспортировке и работе в поле.6. Ширину захвата можно регулировать поворотом рейки и изменением числа секций.7. Отбор мощности от двигателя или колес может быть механическим, гидравлическим и гидромеханическим. Приводом можно и агрегатировать.8. Машину в транспортное положение можно перевести гидроподъемником, приводом и упором, поворотником рабочих органов и рейки и другими средствами компактирования.9. Одна рейка с дисками противосползания достаточны для работы.10. Переключение догружателя ведущих колес в режим разгружателя устраняет потребность в колесах и уплотнение почвы в колее.11. Диски-опоры - датчики-уравновешиватели разгружаются подъемом.Технико-экономическая эффективность от применения машины для обработки земли заключается в повышении эффективности использования металла, энергии, земли, влаги, времени и человеческого фактора, а также защиты человека, техники и окружающей среды. Преобразование массы трактора или иного энергетического средства рабочими органами-опорами и средствами передвижения в нужном направлении, регулирование нагрузки и тягового класса без изменения массы, уменьшение функций ходовой части трактора, составляющей 60-80% материала, и теряющей много энергии и причиняющей ущерб почве буксованием и уплотнением, открывает новое направление решения проблем: экономики производства и применения машины, повышения производительности, экономичности, безопасности, управляемости, устойчивости против опрокидывания, работоспособности на пересеченной и влажной поверхностях, дистанционного выполнения работ в опасной зоне /фиг.14-18/, исключения потребности в тяговой силе и зависимости от влажности. Возможность работы в воде и повторения работ без дополнительных проходов в любое время года и другие достоинства позволяют комплексно решать задачи обработки грунтов и других материалов в многих отраслях.Возможность использования автомобиля, теплового и электрического двигателей и любого трактора на обработке почвы и грунтов без буксования устраняет потребность в дорогостоящих типажах тракторов и системах машин для различных зон и решает проблемы жизнеобеспечения и качества жизни всех производителей техники и продукции земледелия.
Формула изобретения1. Машина для обработки почвы, содержащая энергетический и технологический модули, механизмы реверсивного перемещения рабочих органов и управления, отличающаяся тем, что энергетический модуль с механизмом навески имеет гидроцилиндр, насос, распределитель и регулятор давления в гидроцилиндре для обеспечения догрузки и разгрузки ведущих колес, при этом привод рабочих органов связан с ведущим колесом, при этом рабочие органы имеют разгружатель и догружатель для преобразования технологического веса и нагрузки ходовой части в технологическую силу рабочих органов.2. Машина по п.1, отличающаяся тем, что она имеет предохранительную муфту, выполненную с возможностью подачи сигнала при перегрузке для остановки рабочих органов.3. Машина по п.1, отличающаяся тем, что она имеет объемную муфту для стабилизации нагрузки двигателя, выполненную с возможностью подачи сигнала механизму управления.4. Машина по п.1, отличающаяся тем, что рабочие органы установлены с возможностью работы в ведущем, тормозном и нейтральном режимах.5. Машина по п.1, отличающаяся тем, что она имеет механические руки и рабочие органы для обработки поверхностей или перевозки и распределения материалов в виде сменных бункеров-контейнеров.6. Машина по п.1, отличающаяся тем, что она содержит диск-опору, установленный с возможностью поворота и/или получения информации об отклонении целевой траектории.7. Машина по п.1, отличающаяся тем, что она имеет роторы-ролики, смещенные относительно лемеха в сторону залемешного пространства с возможностью вращения сопротивлением почвы или уравновешивания реакции почвы в режиме реактора для выполнения функции полевой доски.QA4A Сведения о заявлении обладателя патента Российской Федерации на изобретение о предоставлении любому лицу права на использование изобретения (открытая лицензия) (73) Патентообладатель: Гаджимурадов Исин Мевлютович Номер и год публикации бюллетеня: 20-2004 Адрес для переписки: 362020, г. Владикавказ, ул. Кесаева, 123, кв. 76 Извещение опубликовано: 10.02.2006 БИ: 04/2006 MM4A Досрочное прекращение действия патента из-за неуплаты в установленный срок пошлины за поддержание патента в силе Дата прекращения действия патента: 25.07.2009 Дата публикации: 10.12.2011 Популярные патенты: 2295848 Способ дезинсекции и дезинфекции материалов зернового происхождения и устройство для его осуществления ... в приосевой зоне и повышения равномерности обработки зерна и производительности.Введение внутрь узлов ввода и вывода продукта электродов также ведет к механическому повреждению пролетающих зерен, что вредно для продукта. К недостаткам известного устройства относится также размещение в плоскости верхнего днища камеры герметизирующего диэлектрического окна, которое находится под действием излучения плазмы и при использовании относительно дешевых материалов для этого окна быстро разрушается и требует замены. Решаемая предлагаемым изобретением техническая задача заключается в разработке устройства, способного обеспечивать высокую производительность и экономичность процесса ... 2075933 Композиция для иммунизации растений от различных фитопатогенов ... (таблетка) абсолютно стабильна, а это равносильно хранению композиции нескольким годам при комнатной температуре. Тогда как индивидуальные полиненасыщенные жирные кислоты, например, арахидоновая кислота подвержены окислению на 5-10% за три дня хранения при температуре 37oС (по данным каталога фирмы "Serva", 1991). При использовании таблетку растворяют в 100 мл чистой холодной воды в течение 30 мин. Полученный концентрат препарата (маточный раствор) смешивают с необходимым количеством воды в зависимости от проводимой обработки и культуры. Проведены испытания композиции, содержащей различные сочетания жирных кислот, их смесей и их алкиловых эфиров и известного аналога ... 2260943 Способ подращивания личинок осетровых рыб ... активности, что может способствовать образованию свободных радикалов и появлению патологических изменений в клетках [8], что и наблюдается в нашем случае.На фиг. 3 схематически представлен период раннего онтогенеза у осетра, являющийся наиболее благоприятным для корректирующего воздействия гормональным комплексом. Видно, что из всего периода предличиночного развития - от выклева (ст. 36) до перехода на питание внешним кормом (ст. 45) наиболее благоприятной является обработка в период нисходящей части базовой динамики тироксина (Т4, ст. 44).ЗаключениеТаким образом, способ подращивания личинок осетровых рыб является физиологически адекватным и способствует повышению выживаемости и ... 2265314 Устройство системы зашторивания теплиц с регулируемым ходом ... поводки (могут иметь ролики), поддерживающие дополнительные штанги. Это обеспечивает определенное взаимное расположение балки предыдущего пролета и дополнительной штанги при их взаимном перемещении, а также является опорой свободного конца дополнительной штанги. На дополнительных штангах по обе стороны от поводка закрепляются упоры так, чтобы расстояние между ними обеспечивало свободный ход поводка при движении балки зашторивания предыдущего пролета. Свободный ход настраивается перемещением упоров на дополнительных штангах и величина его должна обеспечивать уменьшение хода зашторивания уменьшенного пролета теплицы. Это обеспечивает создание надежного устройства ... 2271096 Способ прогнозирования урожайности озимых зерновых культур в условиях засушливого климата ... описанного способа применительно к решаемой нами проблеме относится то, что данный способ не учитывает фактическую норму высева, длительность посева в днях от начала рекомендуемых сроков, сортовые качества семян в накоплении зерновой массы, влияние температурного режима на формирование корневой системы растений, размещение растений на поверхности поля. Отсутствие учета указанных факторов в данном способе не позволяет получить достоверный прогноз урожайности озимых зерновых культур при возделывании в условиях острозасушливого климата.Сущность заявленного изобретения.Задача, на решение которой направленно изобретение, - получение достоверных данных при прогнозировании ... |
Еще из этого раздела: 2451442 Способ обогащения селеном овощей и злаков 2496298 Узел крепления пальцев подборщика 2065260 Гидравлическая система самоходной сельскохозяйственной машины 2140738 Производные n-арилгидразина, способ их получения, способ подавления насекомых и композиция для подавления насекомых 2201663 Устройство для ориентированной посадки лука 2406295 Способ экологического мониторинга лесов 2050099 Косилка с всасывающим устройством 2012206 Инсектицидная композиция для борьбы с тараканами 2121787 Устройство для регулирования температуры воздуха в теплице 2414114 Зерноуборочный комбайн |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||