Способ составления карт измеренных величинПатент на изобретение №: 2207750 Автор: БЁТТИНГЕР Стефан (DE) Патентообладатель: КЛААС ЗЕЛЬБСТФАРЕНДЕ ЭРНТЕМАШИНЕН ГМБХ (DE) Дата публикации: 10 Июля, 2003 Начало действия патента: 25 Сентября, 1998 Адрес для переписки: 191186, Санкт-Петербург, а/я 230, "АРС-ПАТЕНТ", пат. пов. В.М. Рыбакову Изображения 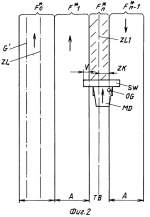 Изобретение относится к способу автоматизированного составления карт измеренных величин с привязкой к географическим координатам местности, в частности к сельскохозяйственным данным урожайности. Способ автоматизированного составления карт измеренных величин с привязкой к географическим координатам местности, в котором величины измеряют в отдельных измерительных позициях. Для каждой пары смежных измерительных позиций с помощью тестовых кругов проводят проверку того, что в них не попадает ни одна другая измерительная позиция. Все такие измерительные позиции, которые удовлетворяют указанному проверочному критерию, назначаются пограничными измерительными позициями. Для пограничных измерительных позиций определяют внутреннее и внешнее положение и по последовательности пограничных позиций определяют прохождение линии границы. Технический результат состоит в повышении точности и достоверности определения прохождения линий границ участков. 8 з.п. ф-лы, 2 ил. , ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУОбласть техники Изобретение относится к способу автоматизированного составления карт измеренных величин с привязкой к географическим координатам местности, в частности к сельскохозяйственным данным урожайности, которые измеряют на некотором участке, в частности вдоль полос движения в отдельных измерительных позициях с помощью устройства для измерений, например, уборочной машины, причем по измерительным позициям определяют наилучшее возможное приближение к прохождению границ участка и затем с учетом этого приближения соответственно назначают измеренные величины в качестве репрезентативных величин в узловых точках координатной сетки. Уровень техники Известен способ составления карт измеренных величин с привязкой к площади без специального ввода линий прохождения границ участков определением методом приближения по огибающей. Однако при этом имеют место неточности измерений у линий внешних границ и не учитываются линии внутренних границ в недоступных для измерений областях. Известны способы сбора измеряемых величин на подлежащих составлению карт площадях с привязкой к координатам отдельных измерительных позиций, в котором величины измеряют на некотором участке и на базе этих измерений автоматизированным методом с помощью компьютера составляют карту распределения измеренных величин с привязкой к географическим координатам, причем на подлежащую обработке поверхность распространяют разработанную координатную сетку "х-у", и к узловым точкам координатной сетки привязывают величины, представляющие измеренные величины в смежных измерительных позициях (см. международную публикацию WO 86/05353, заявку ФРГ 19544112 и др.). Для этого применяют по отдельности или в комбинации различные методы, такие как метод средней величины, интерполяцию или экстраполяцию, или геостатический метод, такой как метод Кригинга. Адекватное применение данного способа требует того, чтобы границы участка были известны настолько, чтобы была известной принадлежность отдельных узловых точек координатной сетки к участку или к внешней области. Ввод линий прохождения границ участка в компьютер осуществляют, например, путем изображения вручную на графическом устройстве ввода, что, прежде всего, при больших участках требует значительного времени и тщательности, или с помощью сложных и дорогостоящих компьютерных систем. Для снижения трудоемкости часто используют данные о линиях границ участков, ранее записанные в банке данных, как, например, это описано в патенте США 5666793, МПК5 A 01 D 41/12, A 01 F 12/00, опубл. 16.09.1997г. В этом способе измеренные величины, в частности сельскохозяйственные данные, например, об урожайности, измеряют на некотором участке, вдоль полос движения в отдельных измерительных позициях с помощью устройства или машины для измерений, например, уборочной машины, причем по измерительным позициям определяют наилучшее возможное приближение к прохождению границ участка и затем с учетом этого приближения соответственно назначают измеренные величины в качестве репрезентативных величин в узловых точках координатной сетки. Этот способ принят в качестве прототипа. Однако и в этом способе требуется уточнение границ, так как возможны изменения границ участков по агротехническим причинам, например, из-за трудностей обработки по несущей способности почвы или вследствие недостаточной урожайности. Это также требует больших профессиональных знаний и знаний местности от персонала, производящего измерения и составление карты. Поэтому предлагается использовать дорогостоящие системы определения координат, такие как спутниковые системы глобального определения местонахождения (GPS) и другие. Это приводит к резкому удорожанию работ, но не обеспечивает необходимую точность и достоверность данных. Сущность изобретения Задачей, на решение которой направлено изобретение, является значительно более точное и достоверное определение прохождения линий границ участков. Решение поставленной задачи достигается за счет того, что в способе составления карт измеряемых величин, в особенности сельскохозяйственных величин урожайности, привязанных к географическим координатам, которые измеряют на некотором участке, в частности, вдоль полос движения в отдельных измерительных позициях устройства или машины для измерений, причем по указанным измерительным позициям вычисляют прохождение линии границы участка и затем с учетом этого прохождения измеренные величины соответственно назначают в качестве репрезентативных величин в узловых точках координатной сетки, согласно изобретению для всех пар смежных измерительных позиций по окружающим их тестовым зонам, в частности тестовым кругам, расчетным путем проводят проверку того, что в них не попадает ни одна другая измерительная позиция, или для всех измерительных позиций на полосах движения по окружающим указанные измерительные позиции тестовым зонам, в частности тестовым кругам, расчетным путем проводят проверку того, что они по меньшей мере с одной стороны не пересекают никакую другую полосу движения, причем указанные тестовые зоны имеют тестовые размеры, в частности тестовые радиусы, которые превышают величину удаления между смежными измерительными позициями или смежными полосами движения на предусмотренную величину допуска Т, и все указанные измерительные позиции, удовлетворяющие упомянутому тестовому критерию, объявляют пограничными позициями, а пограничную сторону определяют в соответствии с тестом и по последовательности смежных пограничных позиций с учетом рабочей ширины измерительного устройства определяют прохождение линии внешней или, соответственно, внутренней границы. Дающие дополнительные преимущества варианты выполнения приведены в зависимых пунктах формулы изобретения. Изобретение основывается на исходной посылке, что измерение величин с привязкой к географическим координатам производят для всей площади участка. Так, например, при измерении урожайности производят сбор урожая на всей площади участка до его границ и при этом в процессе движения машины, например, уборочного комбайна, в отдельных измерительных позициях регистрируют величины собранного урожая на последнем участке движения в привязке к измеренным на нем координатным точкам. Также и при вспашке или обработке участка с движением по полосам движения можно производить измерение величин в соответствующих измерительных позициях до тех пор, пока участок обработки полностью не покрывается. По зарегистрированным в процессе движения местным координатам измерительных позиций определяют линию прохождения смежного отрезка движения, по нему определяют удаление, то есть рабочую ширину, и путем сравнения с предельной величиной удаления определяют приграничные отрезки полосы движения, а тем самым и прохождения линии границы или наилучшее приближение к ней. Способ позволяет не только точно установить линии внешних границ, но также и определять путем анализа схождения и расхождения смежных отрезков движения расположение внутренних границ зон, не подлежащих обработке. После определения линии границ участка или наилучшего приближения к ней осуществляют привязку измеренных величин к узловым точкам координатной сетки с учетом прохождения границ и составляют карту. Усовершенствование настоящего способа может быть осуществлено тем, что производят измерения текущей рабочей ширины сельскохозяйственной машины в соответствии с удалением от смежной полосы движения посредством либо ввода данных водителем машины, либо постоянного измерения, так что локальная рабочая ширина вводится в качестве еще одной известной величины в вычисления для определения предельной величины удаления и линии прохождения границы или наилучшего возможного приближения к ней. Предельную величину удаления, которая служит для проверки того, является ли полоса движения пограничной полосой движения, выбирают несколько большей величины рабочей ширины, с тем, чтобы лежащие в допускаемых пределах отклонения от курса движения по полю по искривленным колеям не приводили к ошибочной индикации положения границ. Для одной полосы движения предусматривают допуск на отклонения в 20%, а для двух смежных полос общий допуск в 40% рабочей ширины. Так, когда рабочим агрегатом является зерноуборочный комбайн с шириной захвата 9 м, предельную величину принимают равной примерно 12,5 м. Таким образом, если измерительная позиция отстоит больше чем на 12,5 м от смежной полосы, образованной последовательным рядом измерительных позиций, то данная измерительная позиция является позицией пограничной полосы. Ввиду того, что участки по своей ширине не кратны рабочей ширине, а обычно имеют косые границы, рабочая ширина на пограничной полосе движения часто бывает неполной. Соответственно этому предусмотрено усовершенствование способа, в котором при сборе данных по измеряемым величинам, в частности урожайности, замеряют также текущую локальную рабочую ширину и на ее основе вычисляют предельную величину удаления, в частности вычисляют прохождение линии границы в пограничных измерительных позициях с учетом локальной рабочей ширины. Дальнейшее повышение точности определения прохождения линий границ достигается при условии, когда учитывают положение локаторного устройства, то есть приемной антенны, по отношению к положению рабочей области и рабочей ширины на машине для измерения величин. Это имеет значение как при определении предельных значений удаления, так и при определении прохождения границ. Если антенна расположена с эксцентриситетом по отношению к рабочей области устройства для измерений, то при движении во встречных направлениях по участку имеет место уменьшение или увеличение величины удаления между линиями измерительных позиций поочередно на двукратную величину эксцентриситета. Соответственно этому для полос встречного движения предельная величина удаления должна быть установлена меньше или больше предусмотренной рабочей ширины с добавлением величины допуска в зависимости от положения эксцентриситета по отношению к направлению движения. Кроме того, при приближенном расчете прохождения границ необходимо учитывать величину эксцентриситета относительно направления движения. Целесообразно учитывать эксцентриситет локации, т.е. положение антенны по отношению к рабочей области устройства для измерений непосредственно при получении координат и измеряемых величин, таким образом, чтобы определяющие местонахождение координаты были записаны в память в отцентрированном по отношению к рабочей зоне виде, т.е. были откорректированы с учетом ширины и расположения рабочей области по отношению к антенне. Если корректировку положения измерительных позиций произвести сразу же, то отпадает необходимость записывать в память данные положения рабочих областей при сборе величин измерения, данных координат и величин рабочей ширины. Тогда предельная величина удаления для определения линий границ получается в виде суммы половин рабочей ширины, записанных в памяти смежных рядов измерительных позиций с добавлением величин допуска. Для определения приближенной линии границы учитывается половина рабочей ширины, записанной в памяти пограничной линий измерительных позиций. На практике обработка поля уборочным комбайном, который предпочтительно служит для измерения величин и определения координат, обычно начинается с одного или нескольких проходов по периметру, при которых часть режущего аппарата выступает за границу и работает вхолостую. Это учитывается посредством текущего определения положения рабочей области и рабочей ширины. В этом случае последние полосы движения часто косо врезаются в уже обработанную окружную область, или появляются более малые величины рабочей ширины, и рабочая область отстоит от крайних кромок режущего аппарата. Все эти данные замеряются на месте и учитываются при сборе измеренных величин, а в тех случаях, когда в этой области лежит или к ней примыкает необрабатываемая зона, посредством тестового способа определения границ определяются также внутренние границы участка. В альтернативной модификации вместо проверки на предельную величину удаления смежных полос движения осуществляют проверку предельной величины удаления между координатными точками измерительных позиций в любой последовательности, причем для каждой пары смежных позиций проверяют, охватывает ли проведенный через них тестовый круг по меньшей мере еще одну измерительную позицию. Если нет, то эти две измерительные позиции и связанный с ними тестовый круг являются пограничными. Радиус тестового круга выбирают равным обычной величине удаления между позициями измерения, которое примерно равно номинальной рабочей ширине. Далее, за основу принято положение, что удаление измерительных позиций друг от друга примерно одинаково во всех направлениях, иначе необходимо было бы соответственно выбирать величину дополнительного допуска или выбирать подходящую форму тестовой зоны, например эллипс с длиной осей соответственно величине удаления измерительных позиций в обоих направлениях с добавлением допуска, причем оси должны быть ориентированы согласно расположению измерительных позиций. Величина удаления между измерительными позициями обычно зависит от скорости машины, поскольку сигналы координат передаются с фиксированной частотой по времени. В связи с тем, что процедуры проверки по удалению линий измерительных позиций или полос движения ограничивают снаружи или внутри также и территории, для которых не могут быть записаны значения координат по техническим причинам, например по условиям приема сигналов, предусмотрено чтобы либо оператор вводил соответствующие пометки, либо они записывались автоматически, либо передавалось промежуточное сообщение о таких островах сбора измеренных величин и о решении оператора включить или исключить эти области из общего процесса обработки. Прохождение границы участка предпочтительно определять посредством алгоритма сворачивания Грэма или методом приближения по огибающей с пограничными координатными точками и соответствующими величинами рабочей ширины. Описание вычислительной операции проверки с помощью тестовых зон, тестовых кругов или тестовых эллипсов служит для наглядности; могут быть использованы и другие, не кругообразные и не эллипсовидные формы, и удаления между смежными позициями могут быть вычислены и проверены также с помощью функций круга или треугольника. Перечень фигур чертежей Фиг.1 изображает пограничную область участка, фиг.2 изображает другую область участка с полосами движения. Примеры осуществления изобретения На фиг. 1 показаны полосы F1-F4 движения в пограничной области участка. Смежные полосы движения имеют противоположные направления R1-R4 движения. Измерительные позиции М11-М15 - М41-М45 нанесены на фактические точки определения координат. Ввиду того, что антенна на машине для измерений установлена с эксцентриситетом Е от ее центральной оси, оптимально корректировать записываемые в память координатные точки (К11-К15; К31-К35) с приведением к центру машины для измерений, так как на удаленных от границы полосах F1-F3 движения используется полная рабочая ширина А. Полоса F4 движения вдоль границы имеет уменьшенную, переменную локальную ширину А41-А-45, которая, кроме того, проходит эксцентрично, так как машина для измерений обрабатывает остаточную часть полосы вдоль границы G. Здесь записываемые в память координаты точек К41-К45 записываются приведенными к середине фактической области обработки. Проверка того, не проходит ли здесь граница участка, производится по записываемым в память координатам точек К41-К45 с учетом относящихся к ним записываемых в память величин половины локальной рабочей ширины А41-А45 и половины максимальной рабочей ширины А с дополнительным допуском Т. Соответственно этому вычисляют локальный тестовый радиус и вокруг записанных в памяти координатных точек К41-К45 очерчивают тестовые круги Т1-Т5 с локальным тестовым радиусом, которые только с одной стороны пересекают смежную полосу F3 движения, что указывает на их пограничное положение с расположением границы на другой стороне. Наилучшее возможное приближение к прохождению линии границы G определяют с помощью соответствующего алгоритма по записанным в памяти пограничным координатным точкам К41-К45 и по относящимся к ним записываемым в память половинным величинам локальной рабочей ширины А41-А45 с добавлением допуска. Определение величин локальной рабочей ширины А41-А45 осуществляют на месте либо автоматически, при использовании сигнала датчиков наличия границы, который имеется на машине для измерений и часто служит для автоматического вождения транспортных средств и/или для регулирования производительности, либо текущим вводом данных оператором при изменениях. Предпочтительно кроме рабочей ширины постоянно определяют также положение рабочей области в пределах полосы движения. Существует особо простой метод учета этой информации о положении для целей дальнейшей обработки, когда положение измеренных координат записывается в память с корректировкой, которая заключается в наложении на рабочую область. Корректировку осуществляют в поперечном направлении по отношению к направлению движения. Тогда не нужно записывать в память дополнительные величины. В альтернативном варианте, когда величины рабочей ширины А41-А45 не поддаются замеру, их рассчитывают по схождению смежных полос движения. В этом случае в память записывают вспомогательные координатные точки Н41-Н45, центрированные по полной рабочей ширине. Рассчитывают удаление А*41-А*45 между вспомогательными координатными точками и смежной полосой F3 движения; оно соответствует величинам локальной рабочей ширины А41-А45 в пределах допусков измерений и расчета. Соответственно этому по возможности наилучшее приближение к прохождению линии границы G определяют как линию, проходящую на удалении, равном половине максимальной рабочей ширины А, вдоль последовательных пограничных вспомогательных координатных точек Н41-Н45. Другой способ расчета пограничных координатных точек К11-К15 поясняется тестовыми кругами Т*1-Т*5; Т"1-Т"5. Эти тестовые круги проводят в данном примере через две смежные координатные точки, и круг, занимающий внешнее положение, является пустым и тем самым указывает на пограничное положение точки и сторону прохождения линии границы G*. Когда измерительные позиции расположены на полосах движения, проверку по тестовым кругам практически проводят по парам точек от одной к другой, так что круг как бы перекатывается по точкам. Если на одной стороне полосы движения уже в ходе прохода смежной полосы выявляется явное соседство, то этого достаточно для переноса тестирования на другую сторону. После того как наконец получено наилучшее возможное приближение к прохождению линии границы, можно пересчитать пограничные измеренные величины путем учета по координатной сетке тех частей площади, которые фактически лежат в пределах границы. На фиг.2 показан другой пример полос F*0-F*n движения вблизи границы G" участка, по которому проходит зерноуборочный комбайн MD в процессе уборки урожая. Первоначальная полоса движения F*0 перекрывает границу G" и имеет только частичную рабочую ширину. Из-за этого измеряемые координаты точек записываются в память в пересчете на центральную линию ZL фактически обрабатываемой рабочей области. После того как вокруг участка вдоль границы будет пройдена следующая полоса F*1 движения, остальные полосы проходят как обычно, со встречными направлениями движения, причем предпоследняя полоса F*n-1 движения еще имеет полную рабочую ширину А, а последняя полоса F*n движения имеет только частичную рабочую ширину ТВ. Она расположена с поперечным отступом V от боковой кромки режущего аппарата SW. Поэтому позиции измерений регистрируются по месту действительного положения центральной оси локатора OG с корректировкой на величину ZK корректировки с приведением к центру, причем эта величина представляет параллельное смещение относительно теоретической центральной линии фактической рабочей области с одновременной записью локальной частичной рабочей ширины ТВ и величины, являющейся объектом измерения.ФОРМУЛА ИЗОБРЕТЕНИЯ1. Способ составления карт измеряемых величин, в особенности сельскохозяйственных величин урожайности, привязанных к географическим координатам, которые измеряют на некотором участке, в частности, вдоль полос движения в отдельных измерительных позициях устройства для измерений, причем по указанным измерительным позициям вычисляют прохождение линии границы участка, и затем с учетом этого прохождения измеренные величины соответственно назначают в качестве репрезентативных величин в узловых точках координатной сетки, отличающийся тем, что для всех пар смежных измерительных позиций по окружающим их тестовым зонам, в частности, тестовым кругам, расчетным путем проводят проверку того, что в них не попадает ни одна другая измерительная позиция, или для всех измерительных позиций на полосах движения по окружающим указанные измерительные позиции тестовым зонам, в частности, тестовым кругам, расчетным путем проводят проверку того, что они по меньшей мере с одной стороны не пересекают никакую другую полосу движения, причем указанные тестовые зоны имеют тестовые размеры, в частности, тестовые радиусы, которые превышают величину удаления между смежными измерительными позициями или смежными полосами движения на предусмотренную величину допуска Т, и все указанные измерительные позиции, удовлетворяющие упомянутому тестовому критерию, объявляют пограничными позициями, а пограничную сторону определяют в соответствии с тестом и по последовательности смежных пограничных позиций с учетом рабочей ширины измерительного устройства определяют прохождение линии внешней или соответственно внутренней границы. 2. Способ по п. 1, отличающийся тем, что заданный тестовый радиус для проверки удалений между смежными полосами движения вычисляют по рабочей ширине А устройства для измерений с добавлением допуска Т или по удалению между последовательными измерительными позициями с добавлением указанного допуска Т. 3. Способ по п.2, отличающийся тем, что локальную рабочую ширину А измеряют путем текущего измерения или она вводится оператором устройства для измерений, эти локальные величины рабочей ширины записываются в память с привязкой к измерительным позициям и по этим записанным в память локальным величинам рабочей ширины вычисляют локальный тестовый радиус. 4. Способ по п.2, отличающийся тем, что прохождение границы участка определяют вдоль пограничной полосы движения с учетом локальной рабочей ширины. 5. Способ по одному из предыдущих пунктов, отличающийся тем, что тестовый радиус задают таким, что локально учитывается эксцентричное положение устройства для определения координат измерительных позиций на измерительном устройстве по отношению к полосе движения при наличии смежных полос и их ориентирование по отношению друг к другу. 6. Способ по п.5, отличающийся тем, что для измерительных позиций с замеренными координатами эксцентричное положение устройства для определения координат измерительных позиций на измерительном устройстве по отношению к полосе при необходимости записывают в память в зависимости от направления движения в виде откорректированной измерительной позиции. 7. Способ по одному из пп.4-6, отличающийся тем, что записывают в память и обрабатывают данные положения устройства для определения координат измерительных позиций по отношению к текущему положению рабочей области. 8. Способ по п.7, отличающийся тем, что измерительные позиции с замеренными координатами записывают в память и обрабатывают в отцентрированном виде относительно положения текущей рабочей области. 9. Способ по одному из предыдущих пунктов, отличающийся тем, что прохождение границы участка определяют посредством алгоритма сворачивания Грэма или методом приближения по огибающей с пограничными координатными точками и соответствующими величинами рабочей ширины.Популярные патенты: 2020793 Способ выращивания растений и стаканчик для его осуществления ... Предложено каркас стаканчика выполнять разборным. Возможны следующие варианты способа стаканчика и его деталей. Стаканчик может иметь форму трехгранной, четырехгранной и шестигранной пустотелой призм, открытых с одного конца. Стаканчик может быть неперфорированным и перфорированным. В первом случае растение томата должно быть при посадке в почву освобождено от стаканчика и каркаса. Во втором случае растение высаживается в почву в стаканчике с целым или разобранным каркасом. Каркас в этом случае не снабжается пластинкой, перекрывающей поперечное сечение стаканчика. В качестве материала для стаканчика может быть взята толстая бумага, покрытая пластмассовой пленкой, как в ... 2490869 Способ направленного изменения циркуляции воздушных масс и связанных с ней погодных условий ... - длительность работы включенного блока. Блоки ионизаторов могут включаться по направлению вращения или против направления вращения часовой стрелки.(iv) Примеры реализации изобретенияНа фиг.1 представлена схема ионизаторов, посредством которой осуществляют однополярную ионизацию приземного воздуха и инжекцию ионов. На фиг.2А представлена схема расположения ионизаторов по прямой линии, ориентированной по направлению ветра.На фиг.2В - схема расположения ионизаторов по прямой линии, ориентированной перпендикулярно по отношению к направлению ветра. На фиг.3 представлена схема расположения одного из ионизаторов, входящего в блок на высоте, обеспечивающей ограничение высоты подъема ... 2477599 Жатка зерноуборочного комбайна ... фиг.5 - взаимодействие свободного конца пружинного пальца с полкой соседней гребенки транспортера, в аксонометрии.Жатка зерноуборочного комбайна (фиг.1, фиг.2) содержит мотовило 1 с закрепленными на нем лопастями 2, режущий аппарат 3, установленный на корпусе 4 жатки 5, устройство для отвода срезанной хлебной массы, выполненной в виде двух транспортеров 6, размещенных по обе стороны продольной оси жатки 5 параллельно режущему аппарату 3, подающий битер 7, наклонную камеру 8 с транспортером 9, опорный лист 10 и привод рабочих органов 11, при этом транспортеры 6 устройства для отвода срезанной хлебной массы снабжены гребенками 12 (фиг.3), выступающие части которых расположены на ... 2272840 Способ молекулярного маркирования пола хмеля обыкновенного (humulus lupulus l) ... растений фрагмента ДНК, который выявляется с помощью электрофореза в агарозном геле. В указанной статье авторы приводят следующие методики: Выделение ДНК:1. 9 г свежих листьев хмеля замораживали в жидком азоте и измельчали до порошкообразного состояния. 2. Добавляли к измельченным листьям 19 мл экстрагирующего буфера (Буфер содержит 100 мМ ацетата натрия, 50 мМ ЭДТА, 500 мМ NaCl, 2% поливинил пиролидона, 1,4% SDS, 60 мМ цистеина, рН 5,5).3. Смесь инкубировали 30 мин при 65°С. 4. Дважды проводили очистку смесью хлороформ / изоамиловый спирт (24:1).5. Преципитация ДНК этанолом.6. Осажденную ДНК растворяли в буфере, содержащем 10 мМ Tris и 1 мМ ЭДТА рН 8.Условия проведения ... 2477044 Искусственная рыболовная приманка (варианты) ... приманки, который выполнен в виде гибкого элемента, расположенного как влитая деталь внутри корпуса приманки вдоль головной и хвостовой части, причем гибкий элемент представляет собой цепочку, или поводок, или пластинку с отверстиями, окантованными металлом или твердым пластиком, комбинированную с цепочкой и/или поводком, а крючок продет через какую-либо часть гибкого элемента. Согласно изобретению:- корпус приманки выполнен в виде виброхвоста или риппера, или твистера, или лягушки; - хвостовая часть корпуса имеет вид хвоста рыбки, или спиралевидного хвоста, или двойного спиралевидного хвоста, или лапок лягушки;- гибкий элемент содержит дополнительные звенья, например колечки, ... |
Еще из этого раздела: 2265314 Устройство системы зашторивания теплиц с регулируемым ходом 2254705 Способ уплотнения и герметизации консервируемых кормов в рулонах 2235464 Гербицидно-действующее средство 2048767 Способ отбора самок норок для воспроизводства 2492623 Портативный электроинструмент с управлением спусковым механизмом 2269243 Капсулированный посадочный материал с регулируемыми свойствами и способ его получения 2414114 Зерноуборочный комбайн 2239993 Устройство для комбинированного охлаждения сельскохозяйственной продукции естественным и искусственным холодом 2010519 Способ биологической борьбы с вредителями растений 2148319 Растительное средство для борьбы с пресноводными моллюсками |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||