Мониторинг уровня заполнения бункера для сельскохозяйственного продуктаПатент на изобретение №: 2499381 Автор: ФИЛЭН Джеймс Джозеф (US), ШЛЯЙХЕР Тилер (US) Патентообладатель: ДИР ЭНД КОМПАНИ (US) Дата публикации: 10 Августа, 2012 Начало действия патента: 29 Июня, 2009 Адрес для переписки: 129090, Москва, ул. Б. Спасская, 25, стр.3, ООО "Юридическая фирма Городисский и Партнеры" Изображения 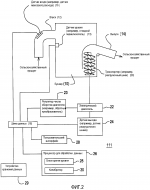  Группа изобретений относится к мониторингу уровня заполнения бункера. Система мониторинга включает датчик уровня, соединенный с бункером, для определения конкретного контрольного уровня сельскохозяйственного продукта в бункере и генерирования калибровочного показателя. Датчик входа определяет скорость впуска сельскохозяйственного продукта в бункер. Транспортер выполнен с возможностью перемещения сельскохозяйственного продукта из бункера. Датчик выхода обеспечивает индикатор состояния, который показывает, находится ли транспортер в активном состоянии или в неактивном состоянии во время одного или более оценочных временных интервалов. Процессор для обработки данных на основании индикатора состояния определяет скорость выпуска сельскохозяйственного продукта. Процессор для обработки данных содержит блок оценки уровня для оценки предполагаемого уровня заполнения бункера на основании скорости впуска и скорости выпуска. Группа изобретений обеспечивает высокую точность показаний уровня заполнения бункера. 2 н. и 21 з.п. ф-лы, 3 ил. Область техники, к которой относится изобретение Настоящее изобретение относится к мониторингу уровня заполнения бункера для сельскохозяйственного продукта, такого как зерно. Уровень техники Комбайн, уборочная машина или другое транспортное средство соединены с бункером для хранения зерна, семян масличных культур или другого сельскохозяйственного продукта. Некоторые бункеры могут быть снабжены одним или более переключателями для мониторинга уровня сельскохозяйственного продукта в бункере. Однако, если уровень заполнения бункера находится между двумя переключателями, разрешающая способность отсчета показаний уровня заполнения бункера может быть недостаточной. Кроме того, датчик уровня заполнения бункера со множеством переключателей может быть трудно обслуживать, по причине поломок переключателей от грязи, мусора или сельскохозяйственного продукта. Соответственно, существует необходимость в усовершенствованных способе и системе для мониторинга уровня заполнения бункера для сельскохозяйственного продукта. Раскрытие изобретения В соответствии с одним вариантом осуществления, система мониторинга для мониторинга уровня заполнения бункера для сельскохозяйственного продукта содержит бункер для хранения сельскохозяйственного продукта, имеющий впуск и выпуск. Датчик уровня, соединенный с бункером, определяет конкретный контрольный уровень сельскохозяйственного продукта и генерирует калибровочный показатель. Для определения скорости впуска сельскохозяйственного продукта во впуск бункера, с впуском соединен датчик входа (например, датчик массового расхода). Транспортер (например, разгрузочный шнек) выполнен с возможностью перемещения сельскохозяйственного продукта из выпуска или через него. С транспортером соединен датчик выхода. Датчик выхода обеспечивает индикатор состояния, который показывает, находится ли транспортер в активном состоянии или в неактивном состоянии во время одного или более оценочных временных интервалов. Процессор для обработки данных определяет скорость выпуска сельскохозяйственного продукта на основании индикатора состояния. Процессор для обработки данных содержит блок оценки уровня для оценки предполагаемого уровня заполнения бункера на основании скорости впуска и скорости выпуска. Процессор для обработки данных содержит калибратор для калибровки предполагаемого уровня заполнения бункера с учетом конкретного контрольного уровня в зависимости от калибровочного показателя. Краткое описание чертежей ФИГ.1 представляет собой схематичное изображение, которое иллюстрирует один вариант осуществления системы мониторинга для мониторинга уровня заполнения бункера для сельскохозяйственного продукта. ФИГ.2 представляет собой схематичное изображение, которое иллюстрирует один вариант осуществления системы мониторинга для мониторинга уровня заполнения бункера для сельскохозяйственного продукта. ФИГ.3 представляет собой блок-схему, которая иллюстрирует способ системы мониторинга для мониторинга уровня заполнения бункера для сельскохозяйственного продукта. Описание предпочтительного варианта осуществления изобретения В соответствии с ФИГ.1, один вариант осуществления системы 11 мониторинга включает процессор 26 для обработки данных, который принимает данные датчика или сигнал датчика от одного или более следующих устройств: датчика 16 входа (например, датчика массового расхода), датчика 13 уровня и датчика 24 выхода (например, датчика разгрузочного шнека). Процессор 26 для обработки данных может взаимодействовать с пользовательским интерфейсом 28 или устройством хранения данных через шину 18 данных. В одном варианте осуществления, датчик 16 входа, датчик 13 уровня, датчик 24 выхода, пользовательский интерфейс 28 и устройство 29 хранения данных соединены с шиной 18 данных. В свою очередь, шина 18 данных соединена с процессором 26 для обработки данных. Датчик 24 выхода может быть соединен с валом или ротором транспортера 20, вращательным приводным механизмом 122 или электрическим двигателем 22 (ФИГ.2). В одном варианте осуществления, процессор 26 для обработки данных содержит блок 28 оценки уровня и калибратор 30. Процессор для обработки данных может передавать на пользовательский интерфейс 28 выходные данные, данные уровня заполнения бункера или выходной сигнал. Как показано на ФИГ.1, система 11 мониторинга включает бункер 10, причем бункер 10 имеет вход 12 и выход 14. Бункер 10 может представлять собой любой контейнер, сосуд или емкость хранения для хранения сельскохозяйственного продукта. С впуском 12 соединен датчик 16 входа (например, датчик массового расхода). Для определения скорости впуска сельскохозяйственного продукта во впуск 12 бункера 10, с впуском 12 соединен датчик 16 входа. В одном варианте осуществления, датчик 16 входа может содержать пьезоэлектрический или пьезорезистивный элемент, соединенный с отражающим экраном. По мере того, как зерно или сельскохозяйственный продукт, проходящий через впуск 12, ударяет отражающий экран, отражающий экран отклоняется, смещается или подвергается действию силы, которая сдавливает или иным образом взаимодействует с пьезоэлектрическим или пьезорезистивным материалом. Пьезоэлектрический материал представляет собой материал, который изменяет электрическое свойство под действием применения усилия (например, сжимающего усилия). Пьезорезистивный материал представляет собой материал, который изменяет свое сопротивление под действием применения усилия (например, сжимающего усилия). В альтернативном варианте осуществления, датчик 16 входа может содержать радиометрический датчик расхода, микроволновый датчик расхода или любое другое подходящее устройство для определения или оценки расхода, объема в единицу времени, массы в единицу времени сельскохозяйственного материала, входящего в бункер 10 или перемещающегося через впуск 12 в бункер 10. Например, датчик 16 входа может обеспечить скорость впуска сельскохозяйственного продукта, которая измеряется в килограммах в секунду, фунтах в секунду, или бушелях в секунду. Датчик 13 уровня или детектор уровня соединен с внутренней частью бункера 10. Датчик 13 уровня может содержать откидной переключатель, переключатель, прикрепленный к подвижному или поворотному рычагу, который приводится в действие за счет массы или давления сельскохозяйственного продукта внутри бункера 10. Например, датчик 13 уровня может содержать переключатель, который активируется или деактивируется посредством подвижного рычага, который смещен упругим элементом (например, пружиной или эластомером). Несмотря на то, что датчик 13 уровня может быть расположен практически на любом известном уровне заполнения бункера, в одном варианте осуществления, датчик 13 уровня расположен на промежуточном уровне заполнения бункера (например, приблизительно наполовину полном или наполовину пустом) между уровнем пустого бункера и уровнем заполненного бункера. В альтернативном варианте осуществления, датчик 13 уровня может содержать приемопередатчик, который передает электромагнитный сигнал (например, импульс) в направлении отражающей поверхности внутри бункера 10 и приемник, который способен принимать отражение (например, отражение переданного импульса). Электромагнитный сигнал может представлять собой сигнал с частотой ближней инфракрасной области спектра, сигнал с частотой инфракрасной области, сигнал с частотой видимого излучения, сигнал с частотой ультрафиолетового излучения, сигнал с микроволновой частотой или сигнал в пределах другого подходящего частотного диапазона. Если приемник принимает отражение, можно считать, что сельскохозяйственный продукт отсутствует или находится ниже уровня приемопередатчика и отражающей поверхности. Однако, если приемнику не удается принять отражение, можно считать, что сельскохозяйственный продукт присутствует или находится выше уровня приемопередатчика и отражающей поверхности. Транспортер 20 (например, разгрузочный шнек) соединен с выпуском 14 бункера 10. Транспортер 20 выполнен с возможностью перемещения сельскохозяйственного продукта через выпуск 14. В одном варианте осуществления, транспортер 20 представляет собой разгрузочный шнек. Как проиллюстрировано на ФИГ.1, вращательный приводной механизм 122 приводит в действие транспортер 20 (например, разгрузочный шнек) таким образом, что транспортер перемещает или транспортирует сельскохозяйственный продукт из бункера 10 в выпуск 14 или через него. Вращательный приводной механизм 122 имеет вал. Датчик 24 выхода определяет скорость вращения вала или ротора вращательного приводного механизма 122. В одном варианте осуществления, вращательный приводной механизм 122 содержит шкив, колесо, зубчатое колесо или ротор, который принимает вращательное движение от вала двигателя внутреннего сгорания или другой вращательной двигательной установки. Несмотря на то, что скорость вращения или скорость транспортера 20 (например, разгрузочного шнека) может изменяться со скоростью двигателя внутреннего сгорания или другой вращательной двигательной установки, вращательный приводной механизм 122 может быть ограничен определенным диапазоном скоростей вращения, с ограничением нижней скорости вращения и верхней скорости вращения. В альтернативном варианте осуществления, транспортер 20 может содержать ременный, цепной или рычажный узел, который вращается между двумя шкивами, зубчатыми колесами или колесами, при этом к поворотному устройству прикреплено множество расположенных на расстоянии транспортирующих средств (например, ковшей), которые могут зачерпывать, перемещать и сваливать (или иным образом транспортировать) сельскохозяйственный продукт. Датчик 24 выхода соединен с одним или более из: вала или ротора транспортера 20 (например, разгрузочного шнека), вала или ротора вращательного приводного механизма 122, или вала или ротора электрического двигателя 22 (ФИГ.2). В одном варианте осуществления, датчик 24 выхода представляет собой датчик разгрузочного шнека. В еще одном варианте осуществления, датчик 24 выхода представляет собой магниторезистивный датчик, датчик на эффекте Холла или другой датчик магнитного поля и датчик времени для определения скорости вращения вала или ротора, при этом вал или ротор соединен с магнитом (например, постоянным магнитом). Однако, в альтернативном варианте осуществления скорость вращения может быть измерена с помощью механического датчика, который соединен с возможностью вращения (например, через зубчатое колесо или ремень) с валом или ротором. Датчик 24 выхода обеспечивает индикатор состояния, который показывает одно или более из следующего: (a) находится ли разгрузочный шнек в активном состоянии или в неактивном состоянии на протяжении одного или более оценочных временных интервалов, или (b) скорости вращения вала или ротора, соединенного с транспортером 20, вращательным приводным механизмом 122 или электрическим двигателем 22 (ФИГ.2). В одной иллюстративной конфигурации, датчик 24 выхода выполнен с возможностью измерения продолжительности времени (например, общего пройденного или накопленного времени), в течение которого вращательный приводной механизм 122 для приведения в движение транспортера 20 находится в активном состоянии или неактивном состоянии. В еще одной иллюстративной конфигурации, датчик 24 выхода выполнен с возможностью измерения продолжительности времени (например, общего пройденного или накопленного времени), в течение которого электрический двигатель 22 для приведения в движение транспортера 20 находится в активном состоянии или неактивном состоянии. Продолжительность времени может объединять активное состояние, связанное с дискретными или прерывающимися периодами времени или оценочными временными интервалами. В еще одной иллюстративной конфигурации, датчик 24 выхода выполнен с возможностью измерения скорости вращения вращательного приводного механизма 122 в зависимости от времени, при этом вращательный приводной механизм 122 выполнен с возможностью приведения в действие транспортера 20. В еще одной дополнительной иллюстративной конфигурации, датчик 24 выхода выполнен с возможностью измерения скорости вращения электрического двигателя 22 в зависимости от времени, при этом электрический двигатель 22 выполнен с возможностью приведения в действие транспортера 20. Скорость выпуска (выгружаемого сельскохозяйственного продукта через выпуск 14) может быть пропорциональна скорости вращения, средней скорости вращения, или колебаниям скорости вращения ротора или вала транспортера 20, вращательного устройство 122 или электрического двигателя 22 (ФИГ.2). Процессор 26 для обработки данных или блок 28 оценки уровня может оценивать скорость выпуска на основании уравнения или со ссылкой на справочную таблицу или данные, хранящиеся в устройстве 29 хранения данных, соединенном с процессором 26 для обработки данных. В одном примере, процессор 26 для обработки данных определяет скорость выпуска на основании индикатора состояния. В другом примере, процессор 26 для обработки данных определяет скорость выпуска на основании индикатора состояния и скорости вращения. В альтернативном варианте осуществления, пользователь может вводить скорость выпуска в пользовательский интерфейс 28, при этом датчик 24 выхода не передает или не предоставляет соответствующие данные для определения скорости выпуска сельскохозяйственного продукта. Пользователь может вводить скорость выпуска на основании, например, технических условий транспортера 20 (например, разгрузочного шнека) или истории измерений скорости выпуска для транспортера 20. В одном варианте осуществления, процессор 26 для обработки данных содержит блок 28 оценки уровня для оценки предполагаемого уровня заполнения бункера 10 на основании одного или более из следующего: (a) скорости впуска (сельскохозяйственного продукта в бункер 10 через впуск 12), (b) скорости выпуска (сельскохозяйственного продукта, выгружаемого из бункера 10 через выпуск 14), (c) начального уровня заполнения бункера (например, является ли уровень заполнения бункера незаполненным или частично заполненным с определенным объемом или массой сельскохозяйственного продукта). Процессор 26 для обработки данных или блок 28 оценки уровня оценивает скорость выпуска сельскохозяйственного продукта из выпуска 14 бункера 10 на основании, например, индикатора состояния и скорости вращения транспортера 20. Процессор 26 для обработки данных содержит калибратор 30 для отладки или калибровки предполагаемого уровня заполнения бункера с учетом конкретного контрольного уровня в зависимости от калибровочного показателя. Калибратор 30 приводится в действие каждый раз, когда фактический уровень заполнения бункера переключает датчик уровня, показывая, что достигнут или пересечен конкретный контрольный уровень заполнения бункера (например, известный уровень заполнения бункера). Калибратор 30 обеспечивает корректировку (например, корректировку объема или массы), которую добавляют или вычитают из наблюдаемого объема или массы сельскохозяйственного продукта в бункере 10, чтобы компенсировать погрешность измерения или расхождение установленного уровня заполнения бункера по сравнению с известным уровнем заполнения бункера. Соответственно, калибратор 30 может быть активирован на протяжении загрузки (например, наполнения) или разгрузки (например, опорожнения) бункера 10. Процессор 26 для обработки данных или калибратор калибрует или регулирует предполагаемый уровень заполнения бункера с учетом конкретного контрольного уровня заполнения бункера, который передается через калибровочный показатель. Например, если датчик 13 уровня показывает, что был достигнут конкретный контрольный уровень заполнения бункера 10, и если предполагаемый уровень заполнения бункера отличается от конкретного контрольного уровня заполнения бункера 10, процессор 26 для обработки данных или калибратор 30 может регулировать предполагаемый уровень до уровня заполнения бункера посредством корректировочного объема до приблизительно равного конкретному контрольному уровню. Если предполагаемый уровень заполнения бункера меньше, чем конкретный контрольный уровень заполнения бункера, процессор 26 для обработки данных или калибратор 30 добавляет корректировочный объем, чтобы компенсировать расхождение. Однако, если предполагаемый уровень заполнения бункера больше, чем конкретный контрольный уровень заполнения бункера, процессор 26 для обработки данных или калибратор 30, чтобы компенсировать расхождение вычитает корректировочный объем. Пользовательский интерфейс 28 может содержать дисплей, клавиатуру, клавишную панель, переключатель, консоль, координатно-указательное устройство (например, электронную мышь или шаровой манипулятор), звуковой аварийный сигнал, звуковой сигнализатор, измерительное устройство, светоизлучающий диод (LED), электролампу или другой индикатор). Процессор 26 для обработки данных может передавать или посылать данные уровня заполнения бункера или сигнал уровня заполнения бункера на пользовательский интерфейс 28 с равными интервалами, периодическими интервалами или на постоянной основе. Соответственно, пользователя или оператора непрерывно информируют об уровне заполнения бункера, и они могут эффективно планировать разгрузку бункера 10. Упреждающее уведомление и планирование, когда бункер будет наполнен или когда он наполнен, позволяет пользователю или оператору координировать работу транспортного средства (например, комбайна), на котором установлен бункер 10, с другими транспортными средствами, контейнерами, резервуарами или емкостями хранения (например, зерновозами, прицепами или грузовыми автомобилями) для приема груза сельскохозяйственного продукта внутрь бункера. Система 111 мониторинга по ФИГ.2 аналогична системе по ФИГ.1, за исключением того, что в системе 111 мониторинга по ФИГ.2 вращательный приводной механизм 122 по ФИГ.1 заменен электрическим двигателем 22 и регулятором 23 числа оборотов двигателя. Регулятор 23 числа оборотов двигателя соединен с электрическим двигателем 22. В одном варианте осуществления, электрический двигатель 22 приводит в действие вал или ротор транспортера 20 для перемещения или транспортировки сельскохозяйственного продукта из внутренней части бункера 10 для выгрузки сельскохозяйственного продукта в выпуск 14 или через него. Датчик 24 выхода определяет скорость вращения вала или электрического двигателя 22. Процессор 26 для обработки данных определяет скорость выпуска сельскохозяйственного продукта, выгружаемого из выпуска 14, на основании индикатора состояния и скорости вращения. Регулятор 23 числа оборотов двигателя может содержать обратный преобразователь, прерыватель, генератор сигналов, источник постоянного тока, источник переменного тока, источник постоянного напряжения, источник переменного напряжения, регулятор напряжения или регулятор тока для регулирования скорости вращения или управления валом для приведения в движение транспортера (например, разгрузочного шнека). Регулятор 23 числа оборотов двигателя может регулировать скорость вращения электрического двигателя независимо от числа оборотов в единицу времени (например, оборотов в минуту) двигателя внутреннего сгорания, который перемещает транспортное средство. В одном варианте осуществления, скорость вращения электрического двигателя 22 может быть связана с одной или более известными дискретными скоростями вращения. В одном примере, если электрический двигатель работает с единственной скоростью вращения, для оценки скорости выгрузки сельскохозяйственного продукта датчик разгрузочного шнека может определять только, является ли электрический двигатель активным или неактивным. В другом примере, датчик разгрузочного шнека может определять является ли электрический двигатель активным или неактивным для оценки скорости разгрузки наряду с дискретной скоростью вращения электрического двигателя, если электрический двигатель работает со многими скоростями вращения. В одном варианте осуществления, двигатель внутреннего сгорания выполнен с возможностью продвижения транспортного средства (например, комбайна или уборочной машины), на котором установлен бункер 10. Электрический двигатель 22 для приведения в действие транспортера 20 (например, разгрузочного шнека) приводит его в действие со скоростью вращения, независимой от скорости вращения выходного вала или коленчатого вала двигателя внутреннего сгорания. Команды на регулятор 23 числа оборотов двигателя можно подавать через пользовательский интерфейс 28 или процессор 26 для обработки данных для выбора, например скорости вращения для транспортера 20 с целью обеспечения определенной скорости выпуска, скорости разгрузки или пропускной способности сельскохозяйственного материала. Предпочтительно, скорость выпуска можно сохранять одинаковой или на запланированном уровне с помощью электрического двигателя 22 и контроллера 23 независимо от колебаний нагрузки на двигатель внутреннего сгорания. Кроме того, двигатель внутреннего сгорания транспортного средства (например, комбайна или уборочной машины) может испытывать колебания нагрузки в виду холмистой местности, локальных областей высокого урожая культуры или сельскохозяйственного продукта, областей с повышенной сыростью или влажностью культуры или сельскохозяйственного продукта. ФИГ.3 представляет собой способ мониторинга потока сельскохозяйственного продукта (например, зерна, кукурузы, сои или семян масличных культур). Способ по ФИГ.3 начинается на стадии S100. На стадии S100, сельскохозяйственный продукт (например, зерно, кукуруза, соя, пшеница, овес или семена масличных культур) хранится в бункере 10, имеющим впуск 12 и выпуск 14. Бункер 10 может быть установлен на транспортном средстве, например, таком как комбайн или уборочная машина. Транспортное средство может приводиться в движение посредством двигателя внутреннего сгорания, который перемещает ходовые колеса или гусеницы. На стадии S102, датчик 16 входа (например, датчик массового расхода) определяет скорость выпуска сельскохозяйственного продукта во впуск 12 бункера 10. По мере того, как сельскохозяйственный продукт входит в бункер через впуск 12, уровень заполнения бункера сельскохозяйственного продукта может увеличиваться, при условии смещения скорости выпуска сельскохозяйственного продукта из выпуска бункера 10. Например, скорость выпуска может быть нулевой, при этом транспортное средство, уборочная машина или комбайн убирает сельскохозяйственный продукт в поле, а бункер 10 не находится в режиме разгрузки. На стадии S104, датчик 13 уровня определяет конкретный контрольный уровень сельскохозяйственного продукта в бункере 10 и генерирует калибровочный показатель. Стадию S104 можно осуществлять в соответствии с различными методиками, которые можно выполнять по отдельности или вместе. Согласно первой методике, конкретный контрольный уровень может быть при частично заполненном или известном уровне заполнения бункера, связанном с известным объемом или массой сельскохозяйственного продукта. Согласно второй методике, датчик 13 уровня устанавливают в промежуточном положении (например, приблизительно наполовину заполненном или наполовину пустом) между заполненным уровнем заполнения бункера (например, верхняя часть бункера) и незаполненным уровнем заполнения бункера 10 (например, нижняя часть бункера). Согласно третьей методике, калибратор регулирует уровень заполнения бункера каждый раз при включении детектора уровня, связанного с известным уровнем заполнения бункера 10. Согласно четвертой методике, датчик уровня (например, переключатель) активируется или деактивируется посредством подвижного рычага, который смещен упругим элементом против веса или массы сельскохозяйственного продукта. Соответственно, когда сельскохозяйственный продукт достигает или превышает уровень подвижного рычага, масса или давление сельскохозяйственного продукта преодолевает силу смещения упругого элемента со включением или активацией датчика уровня (например, переключателя) в первое состояние (например, рабочее), в то время как, когда сельскохозяйственного продукта ниже, чем уровень подвижного рычага, подвижный рычаг смещается упругим элементом, при этом датчик уровня находится во втором состоянии (например, нерабочем). На стадии S106, транспортер 20 (например, разгрузочный шнек) перемещает сельскохозяйственный продукт через выпуск 14 или из него. Транспортер 20 перемещает сельскохозяйственный продукт через выпуск 14 для выгрузки его в контейнер или емкость для хранения (например, грузовой автомобиль или зерновоз). В одном примере, транспортер 20 включают или приводят в действие (например, с помощью электрического двигателя 22 или вращательного приводного механизма 122) со скоростью вращения, независимой от скорости вращения двигателя внутреннего сгорания для приведения в движение транспортного средства, на котором установлен бункер 10. На стадии S108, датчик 24 выхода обеспечивает индикатор состояния, который показывает одно или более из следующего: (a) находится ли транспортер 20 (например, разгрузочный шнек) в активном состоянии или в неактивном состоянии на протяжении одного или более оценочных временных интервалов, или (b) скорости вращения, связанной с валом или ротором транспортера 20, вращательным приводным механизмом 122 или электрическим двигателем 22 (ФИГ.2). Стадию S108 можно осуществлять в соответствии с различными методиками, которые можно применять по отдельности или вместе. В соответствии с первой методикой, датчик 24 выхода выполнен с возможностью измерения продолжительности времени (например, накопленного пройденного времени или объединенных дискретных оценочных временных интервалов), в течение которой вращательный приводной механизм 122 для приведения в действие транспортера 20 находится в активном состоянии или неактивном состоянии. В соответствии со второй методикой, датчик 24 выхода выполнен с возможностью измерения продолжительности времени (например, накопленного пройденного времени или объединенных дискретных оценочных временных интервалов), в течение которой электрический двигатель 22 для приведения в действие транспортера 20 находится в активном состоянии или неактивном состоянии. В соответствии с третьей методикой, датчик 24 выхода выполнен с возможностью измерения скорости вращения вращательного приводного механизма 122 в зависимости от времени, при этом вращательный приводной механизм 122 выполнен с возможностью приведения в действие транспортера 20. В соответствии с четвертой методикой, датчик 24 выхода выполнен с возможностью измерения скорости вращения электрического двигателя 22 в зависимости от времени, при этом электрический двигатель 22 выполнен с возможностью приведения в действие транспортера 20. На стадии S110, процессор 26 для обработки данных определяет скорость выпуска сельскохозяйственного продукта на основании одного или более из следующего: (a) индикатора состояния и (b) скорости вращения (или скорости вращения в зависимости от времени) вала или ротора, соединенного с транспортером 20, электрическим двигателем 22 или вращательным приводным механизмом 122. Кроме того, процессор 26 для обработки данных или блок 28 оценки уровня оценивает предполагаемый уровень заполнения бункера 10 на основании скорости впуска и скорости выпуска. На стадии S110, если процесс калибровки запущен посредством данных (например, калибровочного показателя) от датчика 13 уровня, процессор 26 для обработки данных или калибратор 30 калибрует предполагаемый уровень заполнения бункера с учетом конкретного контрольного уровня в зависимости от калибровочного показателя. Процессор 26 для обработки данных или калибратор 30 регулирует уровень заполнения бункера каждый раз при включении датчика 13 уровня, связанного с известным уровнем заполнения бункера 10. Датчик 13 уровня изменяет состояния (например, электрические состояния) на основании того, находится или нет уровень заполнения бункера на известном уровне заполнения бункера или ниже него (например, промежуточном уровне заполнения бункера), связанном с датчиком 13 уровня. При корректировке добавляют или вычитают корректировочный объем к установленному или предполагаемому уровню заполнения бункера, чтобы компенсировать погрешность измерения или расхождение в установленном уровне заполнения бункера в зависимости от известного уровня заполнения бункера, который может быть показан датчиком 13 уровня. Если бункер 10 соединен с комбайном, уборочной машиной или другим сельскохозяйственным оборудованием для уборки сельскохозяйственного продукта, скорость впуска сельскохозяйственного продукта может изменяться с выходом убираемого сельскохозяйственного продукта или культуры. Транспортер 20 (например, разгрузочный шнек) может быть бездействующим или выключенным до тех пор, пока бункер 10 не достигнет определенного порогового уровня (например, заполнится или почти заполнится). Когда бункер 10 заполнен или почти заполнен до определенного порогового уровня, зерновоз или другой сосуд или контейнер может быть приспособлен для приема выходного потока сельскохозяйственного продукта из выпуска 14 через разгрузочный лоток или иным образом. В процессе загрузки зерновоза, грузового автомобиля, прицепа или другой емкости или контейнера, транспортер 20, как правило, включен. Уровень заполнения бункера может быть связан с соответствующим объемом, массой, весом или показателем, отображаемым пользовательским интерфейсом 28. Согласно одной методике для определения уровня заполнения бункера, процессор 26 для обработки данных определяет текущий уровень заполнения бункера V(t)бункера в соответствии со следующим уравнением: V(t)бункера =V(t)впуска-V(t)выпуска+VКорректировки +Vисходный, где V(t)впуска зависит от скорости впуска, продолжительности времени впуска и какого-либо отклонения в единицу времени скорости впуска, V(t)выпуска зависит от скорости выпуска, продолжительности времени выпуска и какого-либо отклонения в единицу времени скорости выпуска, VКорректировки представляет собой положительное или отрицательное значение корректировки таким образом, чтобы известный уровень Vбункера 10 был приблизительно равен V(t)бункера , установленному за счет V(t)впуска, V(t)выпуска и заданного Vисходный. Vисходный равен нулю, если зерновой бункер 10 незаполнен. Объем или массу поступившего сельскохозяйственного продукта в бункер 10 можно установить за счет скорости впуска сельскохозяйственного продукта, интегрированной по продолжительности входа. Например, объем или массу поступившего сельскохозяйственного продукта в бункере 10 можно оценить посредством скорости впуска (например, среднего входящего потока), умноженной на продолжительность впуска. Поступивший объем или массу добавляют к начальному уровню заполнения бункера сельскохозяйственного продукта в бункере 10, при этом для незаполненного бункера начальный уровень заполнения бункера составляет ноль. Если транспортер 20 или разгрузочный шнек находится в активном состоянии (на что, например, указывает индикатор состояния), объем или масса сельскохозяйственного продукта в бункере 10 уменьшается за счет скорости выпуска сельскохозяйственного продукта, интегрированной по продолжительности работы транспортера 20. Например, объем или массу уменьшенного сельскохозяйственного продукта можно оценить посредством скорости выпуска (например, средней скорости впуска), умноженной на продолжительность входа. Способ и система для мониторинга уровня заполнения бункера сельскохозяйственного продукта хорошо подходит для непрерывного мониторинга уровня заполнения бункера или состояния, насколько бункер заполнен, как например бункер, установленный на комбайне, уборочной машине или другом транспортном средстве. Датчик (13) уровня и калибратор (30) обеспечивают разрешающую способность и точность для уровня заполнения бункера, которые невозможны иным образом. Например, если бы в альтернативном варианте осуществления способа и системы были исключены датчик (13) уровня и калибратор (30) или процесс калибровки с корректировкой уровня заполнения бункера сельскохозяйственного продукта, функциональные возможности могли бы быть достигнуты с меньшей разрешающей способностью или точностью мониторинга уровня заполнения бункера. После описания предпочтительного варианта осуществления становится понятно, что могут быть выполнены различные изменения, не выходящие за рамки объема изобретения, определенного в приложенной формуле изобретения. Формула изобретения1. Система мониторинга для мониторинга уровня заполнения бункера для сельскохозяйственного продукта, содержащая:бункер для хранения сельскохозяйственного продукта, имеющий впуск и выпуск;датчик уровня, соединенный с бункером для определения конкретного контрольного уровня сельскохозяйственного продукта и генерирования калибровочного показателя;датчик входа, соединенный с впуском для определения скорости впуска сельскохозяйственного продукта во впуск бункера;транспортер для перемещения сельскохозяйственного продукта через выпуск,датчик выхода, соединенный с транспортером и обеспечивающий индикатор состояния, который показывает, находится ли транспортер в активном состоянии или в неактивном состоянии во время одного или более оценочных временных интервалов; ипроцессор для обработки данных для определения скорости выпуска сельскохозяйственного продукта на основании индикатора состояния, содержащий блок оценки уровня для оценки предполагаемого уровня заполнения бункера на основании скорости впуска и скорости выпуска, и калибратор для калибровки предполагаемого уровня заполнения бункера с учетом конкретного контрольного уровня в зависимости от калибровочного показателя. 2. Система по п.1, в которой индикатор состояния дополнительно показывает скорость вращения вала или ротора, соединенного с транспортером. 3. Система по п.1, дополнительно содержащая: вращательный приводной механизм для приведения в действие транспортера, имеющий вал или ротор;датчик выхода, определяющий скорость вращения вала или ротора;процессор для обработки данных, определяющий скорость выпуска на основании индикатора состояния и скорости вращения. 4. Система по п.1, дополнительно содержащая:электрический двигатель для приведения в действие транспортера, имеющий вал или ротор;датчик выхода, определяющий скорость вращения вала или ротора; процессор для обработки данных, определяющий скорость выпуска на основании индикатора состояния и скорости вращения. 5. Система по п.1, в которой датчик входа представляет собой датчик массового расхода. 6. Система по п.1, в которой транспортер представляет собой разгрузочный шнек. 7. Система по п.1, дополнительно содержащая:двигатель внутреннего сгорания для продвижения транспортного средства, на котором установлен бункер; иэлектрический двигатель для приведения в действие транспортера со скоростью вращения, независимой от скорости вращения двигателя внутреннего сгорания. 8. Система по п.1, в которой датчик выхода выполнен с возможностью измерения продолжительности времени, в течение которого вращательный приводной механизм для приведения в действие транспортера находится в активном состоянии или неактивном состоянии. 9. Система по п.1, в которой датчик выхода выполнен с возможностью измерения продолжительности времени, в течение которого электрический двигатель для приведения в действие транспортера находится в активном состоянии или неактивном состоянии. 10. Система по п.1, в которой датчик выхода выполнен с возможностью измерения скорости вращения вращательного приводного механизма в зависимости от времени, при этом вращательный приводной механизм выполнен с возможностью приведения в действие транспортера. 11. Система по п.1, в которой датчик выхода выполнен с возможностью измерения скорости вращения электрического двигателя в зависимости от времени, при этом электрический двигатель выполнен с возможностью приведения в действие транспортера. 12. Система по п.1, в которой датчик уровня содержит переключатель, который активируется или деактивируется посредством подвижного рычага, который смещен упругим элементом. 13. Способ мониторинга уровня заполнения бункера для сельскохозяйственного продукта, включающий:хранение сельскохозяйственного продукта в бункере, имеющем впуск и выпуск;определение конкретного контрольного уровня сельскохозяйственного продукта в бункере и генерирование калибровочного показателя;определение скорости впуска сельскохозяйственного продукта во впуск бункера; перемещение сельскохозяйственного продукта через выпуск, обеспечение индикатора состояния, который показывает, находится ли транспортер в активном состоянии или в неактивном состоянии во время одного или более оценочных временных интервалов; и определение скорости выпуска сельскохозяйственного продукта на основании индикатора состояния, оценку предполагаемого уровня заполнения бункера на основании скорости впуска и скорости выпуска и калибровку предполагаемого уровня заполнения бункера с учетом конкретного контрольного уровня в зависимости от калибровочного показателя. 14. Способ по п.13, в котором индикатор состояния дополнительно показывает скорость вращения вала или ротора, соединенного с транспортером. 15. Способ по п.13, дополнительно включающий: определение скорости вращения ротора или вала, соединенного с транспортером, при этом процессор для обработки данных выполнен с возможностью определения скорости выпуска на основании индикатора состояния и скорости вращения. 16. Способ по п.13, дополнительно включающий приведение в действие транспортера со скоростью вращения, независимой от скорости вращения двигателя внутреннего сгорания для продвижения транспортного средства, на котором установлен бункер. 17. Способ по п.13, в котором датчик выхода выполнен с возможностью измерения продолжительности времени, в течение которого вращательный приводной механизм для приведения в действие транспортера находится в активном состоянии или неактивном состоянии. 18. Способ по п.13, в котором датчик выхода выполнен с возможностью измерения продолжительности времени, в течение которого электрический двигатель для приведения в действие транспортера находится в активном состоянии или неактивном состоянии. 19. Способ по п.13, в котором датчик выхода выполнен с возможностью измерения скорости вращения вращательного приводного механизма в зависимости от времени, при этом вращательный приводной механизм выполнен с возможностью приведения в действие транспортера. 20. Способ по п.13, в котором датчик выхода выполнен с возможностью измерения скорости вращения электрического двигателя в зависимости от времени, при этом электрический двигатель выполнен с возможностью приведения в действие транспортера. 21. Способ по п.13, в котором датчик уровня активируется или деактивируется посредством подвижного рычага, который смещен упругим элементом. 22. Способ по п.13, в котором калибратор регулирует уровень заполнения бункера каждый раз при включении датчика уровня, связанного с известным уровнем заполнения бункера. 23. Способ по п.13, в котором при корректировке добавляют или вычитают корректировочный объем, чтобы компенсировать погрешность измерения или расхождение установленного уровня заполнения бункера по сравнению с известным уровнем заполнения бункера, который может быть указан датчиком уровня. Популярные патенты: 2381650 Синергические фунгицидные комбинации биологически активных веществ и их применение для борьбы с нежелательными фитопатогенными грибами ... означает, что не происходит поражение растений.Если фактическая фунгицидная активность выше, чем рассчетная, то комбинация сверхаддитивна по своему действию, то есть присутствует синергический эффект. В этом случае фактически наблюдаемая эффективность должна быть выше ожидаемого значения эффективности (Е), рассчитанного по формуле, приведенной выше. Изобретение поясняется с помощью следующих примеров, в которых испытывают комбинации, содержащие карбоксамиды (1-1) или (1-4) формул и биологически активное вещество, которое выбирают из группы (2)-(17).Пример А Тест на Pyrenophora teres (ячмень)/лечебный Растворитель:50 вес. частей N,N-диметилацетамида. Эмульгатор:1 вес. часть ... 2012206 Инсектицидная композиция для борьбы с тараканами ... Если для испытания используют квартиры, то контрольные секции находятся в том же самом комплексе, но разделены так, чтобы избежать миграции. Комплексы являются идеальными секциями в отдельном здании на одной стороне стоянки автомашин для обработанной группы и то же самое число секций идентичной конструкции находится на другой стороне стоянки автомашин для контрольной группы. Принимают специальные предосторожности для того, чтобы гарантировать, что комплексы полностью отделены один от другого для предотвращения миграции тараканов. Характеристика условий испытаний. Для квалификации в качестве испытательного места требуется минимальное количество - 15 тараканов до обработки ежедневно ... 2056743 Установка для выращивания пушных зверей ... 7 для выращивания пушных зверей. Воздухоохладитель 6 связан с атмосферой через заборную трубу 8, а помещение 7 сообщено с атмосферой посредством выбросной трубы 9. Вихревая труба 1 состоит из корпуса 10, в котором выполнен диффузор 11 с тангенциальным соплом 12. Диффузор 11 фиксируется относительно корпуса 10 стержнями 13. В сопле 12 размещен рабочий орган 14 со штоком 15, установленный с возможностью возвратно-поступательного перемещения для регулировки проходного сечения сопла. На корпусе 10 смонтирован привод пневматического исполнительного механизма 16 (показан не полностью). Установка работает следующим образом. Из источников сжатого природного газа, которыми в данный ... 2140738 Производные n-арилгидразина, способ их получения, способ подавления насекомых и композиция для подавления насекомых ... ,, -трифтор-р-толил)гидразона Смесь 2,2-диметил-2-(2,6-дихлор- ,, -трифтор-р-толил)гидразид пропионовой кислоты (50,0 г, 0,152 ммоль) и тионилхлорида (53,8 г, 0,452 моль) в толуоле нагревали при температуре дефлегмации в течение 8 часов, охлаждали до комнатной температуры и выпаривали in vacuo с получением масляного остатка. Масло растворяли в гексанах и пропускали через осадок на фильтре из силикагеля. Осадок на фильтре промывали несколькими порциями гексанов. Фильтраты собирали и выпаривали in vacuo с получением указанного продукта в виде желтого масла. 47,2 г (90% выход), идентифицированного с помощью спектральных анализов 1H ЯМР, 13C ЯМР и ИК. Примеры 44-84 Получение ... 2039429 Линия производства молочных продуктов ... аппараты для производства творога и творожных изделий. Участок розлива и хранения готовой продукции снабжен дозировочно-фасовочным устройством, связанным с аппаратами для производства творога и творожных изделий. В линии может быть установлен сепаратор на участке приемки и переработки молока между устройством для опорожнения фляг и аппаратами для производства жидких молочных продуктов. Линия может комплектоваться холодильным прилавком для реализации готовой продукции. В линии может быть размещена установка для санитарной обработки аппаратов и технологических трубо-проводов линии. Предлагаемая линия решает проблему приемки и обработки тары, причем этот процесс максимально упрощен и ... |
Еще из этого раздела: 2261592 Ферма двухконсольного дождевального агрегата 2403708 Устройство для полива сельхозрастений 2267924 Способ стимулирования роста растений 2468582 Инсектицидно-фунгицидный состав и способ борьбы с вредителями и болезнями крестоцветных культур 2440721 Способ определения вредоносности насекомых комплекса "гнус" для крупного рогатого скота 2421965 Способ возделывания зерновых колосовых культур 2075926 Устройство для группового учета молока на доильных установках 2083070 Способ предпосевной обработки семян и устройство для его осуществления 2254705 Способ уплотнения и герметизации консервируемых кормов в рулонах 2384038 Устройство для посадки сеянцев, выращенных в контейнерах |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||