Автоматизированный комплекс устройств для ухода за плантацией растений и способ ухода за плантацией растенийПатент на изобретение №: 2477037 Автор: Заммоев Аслан Узеирович (RU) Патентообладатель: Заммоев Аслан Узеирович (RU) Дата публикации: 20 Декабря, 2012 Начало действия патента: 1 Июня, 2011 Адрес для переписки: 360000, Кабардино-Балкарская республика, г.Нальчик, ул. Лермонтова, 27, кв.2, А.У.Заммоеву Изображения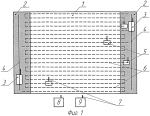  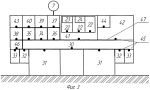 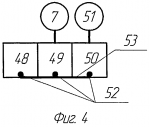 Комплекс состоит из хотя бы одной рабочей платформы и хотя бы одной сервисной платформы. Каждая из платформ включает в себя несущую платформу, движитель с приводом, узел изменения направления движения платформы, энергетический узел, топливный узел и коммуникации между ними. В платформы введены узел управления, узел информационной связи с другими устройствами комплекса, датчик количества энергии, датчик количества топлива, узел хранения и обмена технологическими грузами, стыковочно-обменный узел для обмена с пристыкованными устройствами энергией, топливом, материалами и сменными модулями с рабочими органами, датчик для определения положения платформы относительно плантации, датчик количества технологических грузов, датчик состояния сменных модулей. Рабочие и сервисные платформы отличаются между собой тем, что рабочая платформа дополнительно включает в себя хотя бы один узел для крепления сменных модулей, содержащих технологические рабочие органы или вспомогательные узлы, к несущей платформе хотя бы один сменный модуль. Сменная модель содержит технологический рабочий орган. Сервисная платформа дополнительно включает узел хранения и замены сменных модулей с набором сменных модулей, содержащих технологические рабочие органы или вспомогательные технологические узлы и узел подъема-опускания рабочей платформы. Дополнительно комплекс может оснащаться контрольно-управляющим устройством и устройством мониторинга состояния плантации. Каждое из дополнительных устройств включает в себя узел управления и узел связи. Устройство мониторинга состояния плантации дополнительно включает в себя датчики состояния плантации. Способ включает выполнение технологических операций по уходу за растениями комплексом устройств, описанных выше. Такое конструктивное выполнение и технология позволят максимально автоматизировать процесс ухода за плантацией растений при минимальных затратах ресурсов, снижении удельного давления на почву в процессе ухода при максимальном коэффициенте использования земельной площади. 2 н. и 5 з.п. ф-лы, 5 ил. Изобретение относится к области сельского хозяйства и может быть использовано при создании новых способов ведения сельского хозяйства и средств механизации и автоматизации для их осуществления. Известен способ ведения сельского хозяйства [1], который включает в себя использование мобильных машинно-тракторных агрегатов (МТА), состоящих из трактора с присоединенной сельскохозяйственной машиной. Основными недостатками этого способа ведения сельского хозяйства являются: - большие массогабаритные характеристики МТА, которые вызывают увеличение удельного давления на почву или требуют усложнения конструкции опорных поверхностей, а также усложняют автоматизацию управления движением МТА; - сложность конструкции и процесса комплектации МТА требует затрат времени и ресурсов для их создания и обслуживания в пунктах сервиса, находящихся на удалении от плантации. Известны системы мостового земледелия [2]. Среди их недостатков следует отметить: - сложность конструкции и большие массогабаритные характеристики агромостов, что также требует больших материальных затрат и затрат времени на их создание и обслуживание; - необходимость строительства сооружений на всей территории плантации (например, укладка железобетонных плит, шпал, рельсов, забивание свай и столбов, натяжение тросов), что требует больших материальных затрат и затрат времени на их сооружение; - усложнение конструкции агромоста или его рабочих органов либо выделение земельной площади большой ширины для выполнения разворотов агромоста при обработке растений при обратном проходе с разворотом рабочих органов на 180 градусов; - необходимость выравнивания поверхности почвы; - сложность демонтажа систем и их переноса на другие плантации. Известны конструкции мостовых (портальных) тракторов [3]. Основными их недостатками являются те же недостатки, которые свойственны МТА и агромостам, а именно: - сложность конструкции и процесса комплектации мостового трактора требует затрат времени и ресурсов для его создания и обслуживания в пунктах сервиса, находящихся на удалении от плантации; - усложнение конструкции мостового МТА или его рабочих органов либо выделение земельной площади большой ширины для выполнения разворотов при обработке растений при обратном проходе с разворотом рабочих органов на 180 градусов; - требуется выравнивание поверхности почвы; - сложность перемещения мостового трактора по дорогам. Известны конструкции сельскохозяйственных роботов [4]. Следует отметить наличие у них следующих недостатков: - количества энергии и топлива робота достаточно для обработки малых площадей плантаций; - роботы работают автономно или управляются вручную, что не позволяет автоматически оптимально управлять группой роботов, т.е. затруднена автоматизация процесса ухода за плантацией; - обслуживание роботов осуществляется за пределами поля вручную. Технической задачей, на решение которой направлено изобретение, является создание комплекса устройств по уходу за плантацией растений и способа ухода за растениями с помощью этого комплекса, позволяющих максимально механизировать и автоматизировать технологический процесс ухода за плантацией растений при максимальном коэффициенте использования земельной площади плантации, минимальных затратах ресурсов и минимальном удельном давлении на почву устройств, обрабатывающих насаждения растений. Указанная задача решается тем, что уход за плантацией растений осуществляется автоматизированным комплексом, состоящим из рабочих и сервисных самоходных платформ, или в другом исполнении, дополненным контрольно-управляющим устройством и устройством мониторинга состояния плантации. При этом земельная площадь плантации делится на участки двух видов: рабочие для размещения растений и передвижения по ним рабочих платформ и сервисные для размещения и передвижения по ним рабочих и сервисных платформ, причем сервисные участки выполняются преимущественно примыкающими к краям плантации. Заявленный автоматизированный комплекс для ухода за плантацией и способ ухода за плантацией растений представлены на чертежах, где: Фиг.1 - один из вариантов исполнения плантации растений для выполнения ухода за ней заявленным комплексом устройств. Фиг.2 - структурная схема рабочей самоходной платформы. Фиг.3 - структурная схема сервисной самоходной платформы. Фиг.4 - структурная схема контрольно-управляющего устройства. Фиг.5 - структурная схема устройства мониторинга состояния плантации. Плантация содержит (фиг.1) участки 1, на которых произрастают растения, сервисные участки 2, на которых размещаются и передвигаются сервисные платформы 3 по расчетным траекториям движения 4, и рабочие платформы 5, которые размещаются и передвигаются по всей площади плантации по расчетным траекториям движения 6. По каналу связи 7 между собой связаны рабочие 5 и сервисные 3 платформы плантации, контрольно-управляющее устройство 8 и устройство мониторинга состояния плантации 9. Рабочая платформа (фиг.2) содержит несущую платформу 10, хотя бы один движитель 11 с приводом 12, узел изменения направления движения платформы 13, энергетический 14 и топливный 15 узлы, узел управления платформой 16, узел информационной связи с другими устройствами 17 по каналу связи 7, стыковочно-обменный узел 18, датчики количества энергии 19 и топлива 20, хотя бы один узел крепления 21 к несущей платформе хотя бы одного сменного модуля 22, содержащего технологический рабочий орган 23 или вспомогательный узел 24, узел хранения и обмена технологическими грузами 25, датчик для определения положения платформы относительно плантации 26, датчик количества технологических грузов 27, датчики состояния узлов и сменных модулей 28 и коммуникации между перечисленными составляющими рабочей платформы 29. Сервисная платформа (фиг.3) содержит несущую платформу 30, хотя бы один движитель 31 с приводом 32, узел изменения направления движения платформы 33, энергетический 34 и топливный 35 узлы, узел управления платформой 36, узел информационной связи с другими устройствами 37 по каналу связи 7, стыковочно-обменный узел 38, датчики количества энергии 39 и топлива 40, узел хранения и замены сменных модулей 41 с набором сменных модулей 22, содержащих технологические рабочие органы 23 или вспомогательные технологические узлы 24, узел хранения и обмена технологическими грузами 42, датчик для определения положения платформы относительно плантации 43, датчик количества технологических грузов 44, датчики состояния узлов и сменных модулей 45, узел подъема-опускания пристыкованной к сервисной платформе рабочей платформы 46 и коммуникации между перечисленными составляющими сервисной платформы 47. Контрольно-управляющее устройство (фиг.4) содержит узел управления 48, узел информационной связи с другими устройствами 49 по каналу связи 7, энергетический узел 50, связанный с энергетическим каналом 51, датчики состояния узлов 52 и коммуникации 53 между узлами устройства. Устройство мониторинга состояния плантации (фиг.5) содержит узел управления 54, узел информационной связи с другими устройствами 55 по каналу связи 7, датчики состояния плантации 56, энергетический узел 57, связанный с энергетическим каналом 51, датчики состояния узлов 58 и коммуникации 59 между узлами устройства. Рабочие и сервисные платформы плантации могут быть снабжены сменными модулями, которые могут снимать сменные модули платформ, самостоятельно использовать их и устанавливать на эту же или другую платформу. Все узлы платформ, кроме несущих платформ 10 и 30, могут быть выполнены в виде сменных модулей. Комплекс устройств может быть исполнен в варианте, при котором функции устройства мониторинга состояния плантации может выполнять одна из рабочих или сервисных платформ со специальным сменным модулем, осуществляющим мониторинг состояния плантации. При этом отдельное устройство мониторинга состояния плантации не требуется. В другом варианте исполнения комплекса устройств устройство мониторинга состояния плантации 9 может одновременно выполнять функции контрольно-управляющего устройства 8. При этом отдельное контрольно-управляющее устройство не требуется. Заявленный комплекс устройств осуществляет уход за плантацией растений следующим способом. Автоматическое управление комплексом осуществляется контрольно-управляющим устройством, функции которого может выполнять или один из узлов управления 16, 36 и 54 сервисной 3, рабочей 5 платформ и устройства мониторинга состояния плантации 9, или отдельное контрольно-управляющее устройство 8. Информацию о состоянии плантации передает управляющему устройству по каналу связи 7 устройство мониторинга, функции которого может выполнять или один из рабочих или сервисных платформ, оснащенный хотя бы одним сменным модулем мониторинга состояния плантации, или отдельное устройство мониторинга состояния плантации 9. Далее управление комплексом будем рассматривать в случае осуществления этой функции отдельным контрольно-управляющим устройством плантации 8. Контрольно-управляющее устройство плантации 8, получив информацию от устройства мониторинга состояния плантации 9 и информацию о состоянии всех платформ (сервисных 3 и рабочих 5), автоматически рассчитывает оптимальный алгоритм согласованной работы по уходу за плантацией растений рабочими 5 и сервисными 3 платформами, включающий расчет алгоритмов работы рабочих и сервисных платформ плантации, автоматически рассчитывает траектории передвижения 4 и 6 рабочих и сервисных платформ. Данные, передаваемые по каналу связи 7 контрольно-управляющим устройством плантации 8 рабочим 5 и сервисным 3 платформам, содержит команды и технологические режимы, включающие информацию об изменении состояния платформ плантации, координаты расчетных траекторий и алгоритмов работы. В исходном положении за счет внешних объектов, обслуживающих плантацию, сервисная платформа 3 содержит достаточное для осуществления технологического процесса ухода за плантацией растений количество сменных модулей 22, технологических средств (топлива, энергии, технологических материалов) и рабочих платформ 5. Рабочая 5 платформа движется по плантации при помощи движителей 11 с приводами 12, управление которыми осуществляет узел управления платформы 16 согласно полученному расчетному алгоритму. Сервисная платформа 3 осуществляет движение аналогичным способом при помощи узлов 31, 32 и 36. Автоматическое управление направлением движения рабочей платформы 5 осуществляется узлом управления платформы 1 6 посредством соответствующего управления им узлом изменения направления движения платформы 13 на величину, определяемую по расчетам узла управления 16 с целью минимизации разницы между текущими координатами платформы, получаемыми по данным датчика положения платформы относительно плантации 26, и координатами расчетной траектории движения 6. Автоматическое управление направлением движения сервисной платформы 3 осуществляется аналогичным способом согласно полученному заданию с помощью узлов 36, 33 и 43 по расчетной траектории движения 4 сервисной платформы. Датчики количества энергии 19, количества топлива 20, количества технологических грузов 27, состояния узлов и сменных модулей 28 рабочей платформы 5 передают информацию узлу управления 16, который по ней формирует информацию о состоянии рабочей платформы и передает ее с помощью узла связи 17 по каналу связи 7 контрольно-управляющему устройству плантации 8. Аналогично при помощи датчиков 39, 40, 44, 45, узла управления 36 и узла связи 37 формируется и передается контрольно-управляющему устройству плантации 8 информация о состоянии сервисной платформы 3. Получив координаты расчетной траектории движения 4 и команду на передвижение, сервисная платформа 3 перемещается по сервисному участку 2 к расчетной точке спуска рабочей платформы 5. При этом одновременно в зависимости от состояния рабочей платформы контрольно-управляющим устройством 8 могут быть переданы рабочей 5 и сервисной 3 платформе данные, включающие пересчитанные алгоритмы работы и координаты траектории передвижения рабочей платформы 5. Замена сменных модулей происходит при состыкованных стыковочно-обменных узлах 18 и 38 сервисной 3 и рабочей 5 платформ под управлением узлов 16 и 36. При этом по коммуникациям 29 рабочей платформы 5 его стыковочно-обменный узел 18 снимает с узла крепления 21 сменный модуль 22 и передает его стыковочно-обменному узлу 38 сервисной платформы 3, который в свою очередь по коммуникациям сервисной платформы 50 помещает полученный сменный модуль 22 в свободное место узла хранения сменных модулей 41 сервисной платформы 3. Далее по коммуникации сервисной платформы 50 из узла хранения сменных модулей 41 его стыковочно-обменный узел 38 передает выбранный из имеющегося множества необходимый сменный модуль стыковочно-обменному узлу 18 рабочей платформы 5, который в свою очередь по коммуникациям рабочей платформы 29 устанавливает полученный сменный модуль на соответствующий свободный узел крепления 21. Заполнение рабочей платформы топливом и энергией осуществляется при состыкованных стыковочно-обменных узлах 18 и 38 сервисной 3 и рабочей 5 платформ. При этом энергетический 34 и топливный 35 узлы по коммуникациям 50 сервисной платформы 3 через стыковочно-обменные узлы 38 и 18 передают энергию и топливо по коммуникациям 29 рабочей платформы 5 ее энергетическому 14 и топливному 15 узлам. Аналогичным образом осуществляется обмен технологическими материалами между рабочей 5 и сервисной 3 платформами. При достижении сервисной платформой 3 расчетной точки траектории движения по сервисному участку плантации происходит остановка и по команде производится спуск рабочей платформы 5. Далее при готовности рабочей платформы 5 по команде расчетного алгоритма происходит ее отстыковка от сервисной платформы 3. Рабочая платформа 5 по команде автоматически движется по расчетной траектории 6, проходящей через рабочий участок плантации 1. В зависимости от положения на расчетной траектории 6 и расчетного алгоритма работы рабочая платформа 5 рабочим органом 23 установленного на нем сменного модуля 22 выполняет технологическую операцию ухода за растениями плантации. В зависимости от информации о состоянии рабочей платформы 5 контрольно-управляющим устройством 8 плантации может быть произведен перерасчет алгоритма работы и траектории движения. Так, например, в случае прогнозирования исчерпания энергии или топлива на рабочей платформе ее расчетная траектория 6 формируется с целью перемещения платформы к ближайшему сервисному участку 2, на котором находится готовая обслужить ее сервисная платформа 3. Такие же действия могут потребоваться в случае прогнозирования исчерпания технологических материалов либо, наоборот, переполнения их хранилища (например, требуется разгрузка урожая), а также в случаях аварийного состояния сменных модулей. Сервисная платформа 3, получив команду на приближение к расчетной точке траектории движения для обслуживания рабочей платформы 5, движется к ней, останавливается и ожидает приближения рабочей платформы. При достижении стыковочно-обменных узлов 18 и 38 сервисной 3 и рабочей 5 платформ друг друга происходит остановка рабочей платформы и по команде или автоматически осуществляется стыковка платформ. По информации о состоянии состыкованных рабочей 5 и сервисной 3 платформ контрольно-управляющим устройством плантации 8 производится перерасчет алгоритма согласованной работы по уходу за плантацией растений рабочими и сервисными платформами плантации и траекторий передвижения 4 и 6 рабочих и сервисных платформ, после чего эти данные передаются по каналу связи 7 рабочим 5 и сервисным 3 платформам плантации. Сервисная платформа 3 по полученным данным производит замену сменных модулей 22 рабочей платформы 5, заполнение ее топливом и энергией, обмен технологическими грузами, после чего рабочая платформа 5 с обновленным алгоритмом работы и траекторией движения по команде отстыковывается и продолжает выполнение технологической операции обработки растений. По информации о состоянии сервисной платформы 3 контрольно-управляющее устройство плантации 8 прогнозирует исчерпание топлива или энергии, исчерпание или переполнение хранилища технологических материалов, а также в случае наличия аварийных сменных модулей 22 рассчитывает траекторию движения и подает команду на передвижение сервисной платформы 3 к точке обслуживания внешних объектов, где она останавливается. Контрольно-управляющее устройство плантации 8 будет удерживать сервисную платформу 3 в режиме ожидания до тех пор, пока по информации о состоянии сервисной платформы не установит состояние ее готовности к работе, т.е. заполнения топливом и/или энергией, загрузки и/или выгрузки хранилища технологических материалов, замены аварийных сменных модулей в их хранилище на работоспособные. По завершении обработки плантации каждая рабочая платформа 5 согласно расчетным алгоритмам и траекториям движения 6 стыкуется с сервисной платформой 3. Далее контрольно-управляющим устройством плантации 8 подается команда сервисной платформе 3 на подъем рабочей платформы 5 с помощью узла подъема-опускания 49 и на дальнейшее перемещение сервисной платформы 3 в исходное положение, которое было перед началом работы комплекса. Автоматический расчет алгоритма согласованной работы по уходу за плантацией растений рабочими 5 и сервисными 3 платформами и автоматический расчет траекторий передвижения 6 и 4 рабочих 5 и сервисных 3 платформ комплекса может осуществляться с использованием распределенной вычислительной сети, образованной узлами связи 17, 37, 49 и 55 и узлами управления 16, 36, 48 и 54 рабочих 5 и сервисных 3 платформ, контрольно-управляющего устройства 8, и устройства мониторинга состояния плантации 9, а управление работой вычислительной сети осуществляется одним из узлов управления устройств комплекса. Описанный способ ухода за плантацией растений заявленным автоматизированным комплексом устройств позволяет за счет оптимального распределения энергии и массы между рабочими и сервисными платформами плантации снизить вес и габаритные размеры рабочих платформ, перенести нагрузку на сервисные участки плантации и тем самым сократить затраты ресурсов, снизить удельное давление рабочей платформы на поверхность почвы и увеличить коэффициент использования земельной площади плантации, а заявленный автоматизированный комплекс устройств позволяет максимально механизировать и автоматизировать технологический процесс ухода за плантацией растений. Использованные источники 1. Карпенко А.Н., Халанский В.М. Сельскохозяйственные машины. - М.: Агропромиздат, 1989, с.3-10. 2. Жалнин Э.В., Муфтеев Р.С. История развития и перспективы внедрения мостового растениеводства. // Тракторы и сельхозмашины, 2002, 3. Chamen W.C.T., Dowler D., Leede P.R., Longstaff D.J. Design, operation and performance of a gantry system: experience in arable cropping. // Journal of Agricultural Engineering Research, 1994, 59. р.45-60. 4. http://www.membrana.ru/particle/2985 Формула изобретения1. Автоматизированный комплекс устройств для ухода за плантацией растений, состоящий из хотя бы одной рабочей платформы и хотя бы одной сервисной платформы, каждая из которых включает в себя несущую платформу, движитель с приводом, узел изменения направления движения платформы, энергетический узел, топливный узел и коммуникации между ними, отличающийся тем, что в платформы введены узел управления, узел информационной связи с другими устройствами комплекса, датчик количества энергии, датчик количества топлива, узел хранения и обмена технологическими грузами, стыковочно-обменный узел для обмена с пристыкованными устройствами энергией, топливом, материалами и сменными модулями с рабочими органами, датчик для определения положения платформы относительно плантации, датчик количества технологических грузов, датчик состояния сменных модулей, а рабочие и сервисные платформы отличаются между собой тем, что рабочая платформа дополнительно включает в себя хотя бы один узел для крепления сменных модулей, содержащих технологические рабочие органы или вспомогательные узлы, к несущей платформе хотя бы один сменный модуль, содержащий технологический рабочий орган, а сервисная платформа дополнительно включает узел хранения и замены сменных модулей с набором сменных модулей, содержащих технологические рабочие органы или вспомогательные технологические узлы и узел подъема-опускания рабочей платформы, дополнительно комплекс может оснащаться контрольно-управляющим устройством и устройством мониторинга состояния плантации, каждый из которых включает в себя узел управления и узел связи, а устройство мониторинга состояния плантации дополнительно включает в себя датчики состояния плантации. 2. Комплекс по п.1, отличающийся тем, что сменные модули с рабочими органами платформ могут быть сняты с платформы, использованы и установлены сменными модулями для снятия и установки сменных модулей с рабочими органами на эту же или другую платформу. 3. Комплекс по п.1, отличающийся тем, что у платформ все узлы, кроме несущей платформы, могут быть выполнены в виде сменных модулей. 4. Комплекс по п.1, отличающийся тем, что функции устройства мониторинга состояния плантации выполняет одна из рабочих или сервисных платформ со сменным модулем мониторинга состояния плантации. 5. Комплекс по п.1, отличающийся тем, что функции контрольно-управляющего устройства выполняет устройство мониторинга состояния плантации. 6. Способ ухода за плантацией растений, включающий выполнение технологических операций по уходу за растениями, отличающийся тем, что выполнение технологических операций по уходу за растениями осуществляют автоматизированным комплексом устройств по п.1. 7. Способ по п.6, отличающийся тем, что автоматический расчет алгоритма согласованной работы по уходу за плантацией растений рабочими и сервисными платформами и автоматический расчет траекторий передвижения рабочих и сервисных платформ осуществляется с использованием распределенной вычислительной сети, образованной узлами связи и управления рабочих и сервисных платформ, контрольно-управляющего устройства и устройства мониторинга состояния плантации, а управление работой вычислительной сети осуществляется одним из перечисленных узлов управления. Популярные патенты: 2162635 Устройство для аэрозольного распыления (варианты) ... распыление, включают выбор диаметра клапана или тарелки таким образом, чтобы обеспечить нужное распыление, а также регулировку давления распыления. Может быть выбрано любое средство, обеспечивающее вышеописанное интенсивное распыление. Влияние объемного газа-вытеснителя к основному раствору, количества распыленного раствора и типа устройства для распыления (т.е. интенсивное распыление или нет) на вышеописанную эффективность 5-го варианта устройства по изобретению продемонстрированы ниже со ссылкой на конкретные примеры. (А) Устройство аэрозольного распыления интенсивного типа, содержащее аэрозоль, состоящий из 50 мл основного раствора, содержащего 0,5 г компонента для борьбы с ... 2312500 Способ защиты смородины от вредителей и болезней ... на смородину в массовом порядке от сорной и дикой растительности. Задачей, на решение которой направлено изобретению, являются минимизация и исключение попадания на насаждения особо опасных вредных организмов, обеспечение экологической чистоты производимой диетической продукции, создание условий для активизации полезной фауны, широкое применение экологически безопасных способов, биологических агентов борьбы и повышение урожайности растений.Поставленная задача достигается тем, что в способе защиты смородины от вредителей и болезней, включающем отмывку почвы с корней саженцев перед посадкой, омолаживающую срезку растений без оставления пеньков на 6-8 год эксплуатации насаждений, ... 2112337 Рабочий орган культиватора ... технических культур с шириной междурядий 45 см используют лапу в направлениях движения НД6 или НД3 с шириной захвата B2, равной 95 мм. Таким образом, одна и та же лапа 2 соответствует 5 типам рабочих органов для поверхностной обработки почвы по ГОСТ 1343-76 (действующего и в настоящее время). Для переустановки лапы 2 в новое положение, соответствующее требованиям обработки почвы или междурядных уходов при возделывании пропашных культиваторов, поступают следующим образом. Болт 19 вывинчивают из резьбовой бонки 15 до тех пор, пока штифты 17 окажутся вне пары технологических отверстий 18. Затем лапу 2 поворачивают таким образом, чтобы одно или два лезвия 4-6 были установлены в ... 2192734 Устройство для производства прессованных кип из корней лекарственных растений ... в виде разновеликих полых цилиндров. Опорное кольцо 40 верхней подвижной части 37 камеры 7 размещено на нижнем срезе на внешней поверхности полого цилиндра. Опорное кольцо 43 нижней подвижной части 39 смонтировано на верхнем срезе на внутренней поверхности полого цилиндра наибольшего диаметра. Опорные кольца 41 и 42 средней подвижной части 38 камеры прессования 7 закреплены крепежными элементами на верхнем срезе на внутренней поверхности среднего полого цилиндра и на нижнем срезе на его внешней поверхности. Верхняя подвижная часть 37 снабжена парой ребер жесткости 44. Между ребрами жесткости 44 смонтирована пара втулок 45. Втулки 45 снабжены подшипниками скольжения. Втулки 45 ... 2420060 Способ генетической трансформации растений селекционно-ценных образцов клевера лугового ... с 2,0 мг/л 6-бензиламинопурина, а эпикотильную часть проростков сохраняют путем культивирования на среде Гамборга B5 без гормонов или путем микроразмножения на среде того же состава с добавлением 2 мг/л 6-бензиламинопурина. Морфогенные культуры в процессе генетической трансформации сохраняют способность к регенерации растений и ризогенезу до 24-го пассажа и более на питательной среде Гамборга B5 с 50 мг/л канамицина. Полученные из гипокотильных эксплантов морфогенные культуры по генетическим и морфологическим признакам не отличаются от исходных генотипов.К недостаткам способа относится то, что он ограничен описанием особенностей регенерации растений при генетической ... |
Еще из этого раздела: 2145478 Гранулированное либо пеллетированное средство для защиты растений, способ его получения и способ борьбы с грибами 2165137 Машина для уборки корней лекарственных растений 2228588 Копатель корнеклубнеплодов 2161402 Способ акселерационного содержания и разведения кроликов 2164741 Устройство для заготовки древесины 2114528 Устройство для клеточного содержания мелких животных 2269243 Капсулированный посадочный материал с регулируемыми свойствами и способ его получения 2253239 Способ производства средства для обработки растений (варианты) 2305931 Способ регенерации растений клевера лугового при генетической трансформации 2310308 Способ определения выполненности семян сельскохозяйственных культур и устройство для его осуществления |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||
 5, с.23-30.
5, с.23-30.