Способ управления поведением морских млекопитающих при промысле рыбыПатент на изобретение №: 2276386 Автор: Бахарев Сергей Алексеевич (RU) Патентообладатель: Бахарев Сергей Алексеевич (RU) Дата публикации: 10 Мая, 2006 Начало действия патента: 1 Декабря, 2004 Адрес для переписки: 125414, Москва, ул. Фестивальная, 73, корп.2, кв.131, С.А. Бахареву Изображения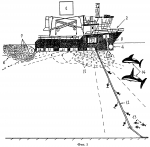  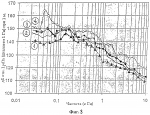 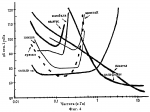 Изобретение относится к области гидроакустики и может быть использовано в рыбной промышленности для изменения поведенческих характеристик морских млекопитающих (ММ). Технический результат заключается в повышении эффективности процесса управления поведением морских млекопитающих (ММ). Способ основан на формировании, усилении и излучении сигналов, воздействии сигналов на морских млекопитающих и изменении их поведенческих характеристик, в качестве сигналов используют широкополосные гидроакустические сигналы (ГАС), излучаемые выбираемыми орудиями лова, корпусом рыбопромыслового судна, а также судовыми системами и механизмами, в том числе и выборочными устройствами рыбопромысловых судов, занятых другими видами промысла, причем упомянутые ШГАС, кроме того, излучаются при помощи пространственно разнесенных широкополосных гидроакустических излучателей, расположенных на корпусе рыбопромыслового судна, также излучаются три тональных ГАС ультразвукового диапазона частот и тональный электромагнитный сигнал ультразвукового диапазона частот, излучаемый в область кильватерного следа рыбопромыслового судна, и дополнительно осуществляется формирование под водой завесы пузырьков с диаметрами, близкими к резонансным частотам поглощения энергии гидроакустических сигналов, излучаемых выбираемым орудием лова и выборочными устройствами рыбопромыслового судна. 6 ил. Изобретение относится к области гидроакустики и может быть использовано в рыбной промышленности для изменения поведенческих характеристик морских млекопитающих (ММ) при промысле рыбы - отвлечение, вытеснение и (или) отпугивание от выбираемых орудий лова. Задача, которая решается изобретением, заключается в формировании, усилении и излучении сигналов для эффективного и длительного управления поведением ММ (включая ММ, не имеющих естественных В«хищниковВ») при промысле рыбы в диапазоне частот, снизу ограниченном верхней граничной частотой наибольшей акустической чувствительности рыб - объекта промысла (С.п., 6 ил.). Способ реализуется следующим образом. До подхода рыбопромыслового судна (РПС) к району промысла (и далее - до окончания промысла), в канале формирования, усиления и излучения широкополосных гидроакустических сигналов с помощью блока формирования осуществляется формирования широкополосных гидроакустических сигналов на частоте При этом основная задача РПС - акустическая маскировка наиболее распространенными широкополосными гидроакустическими сигналами судов, находящихся в районе промысла, но не занимающиеся непосредственно процессом промысла рыбы с помощью ярусов и т.д. В многоканальном (по числу гидроакустических излучателей) усилителе мощности осуществляется усиление данных сигналов до необходимого уровня, а с помощью излучателей, расположенных на корпусе РПС, слабонаправленное (вниз и во все стороны) излучение широкополосных гидроакустических сигналов на одной из частот Морские млекопитающие, имеющие дальность действия своего биологического шумопеленгатора ˜70 км и более (в зависимости от гидролого-акустических и помехо-сигнальных условиях данного географического района) и поджидающие на кромке района подходящие рыбопромысловые суда, не будут реагировать на гидроакустические сигналы (подводные шумы) данного РПС, акустически замаскированного (например) под тарнспортно-рефрежираторное судно. Таким образом, осуществляется дезориентация ММ в районе промысла и торможение ранее выработанного у них условного рефлекса: В«характерный звук РПС - легкодоступная пища, находящаяся в выбираемом с глубины орудии ловаВ». Перед подходом к выбираемому орудию лова в районе промысла во втором канале формирования, усиления и излучения гидроакустического сигнала ультразвукового диапазона (УЗД) частот при помощи генератора осуществляется формирование гидроакустического сигнала УЗД на частоте При этом осуществляется нелинейное перераспределение энергии шумоизлучения РПС из области инфразвуковых и звуковых частот Одновременно с этим, и также для уменьшения интегрального уровня гидроакустических сигналов Однако на промысле нередко возникает ситуация, при которой ММ выходят на РПС, занятое выборкой орудия лова с рыбой, случайно (не приманиваемые характерными звуками РПС) - в процессе своей естественной миграции по данному географическому району. В этом случае, для повышения эффективности управления поведением ММ, находящихся в непосредственной близости от РПС при выборке его орудия лова, в первом канале формирования, усиления и излучения гидроакустических сигналов УЗД частот с помощью блока осуществляется формирования гидроакустических сигналов УЗД частот Одновременно с этим в канале формирования, усиления и излучения электромагнитного сигнала УЗД частот с помощью блока формирование осуществляется формирования электромагнитного сигнала УЗД на частоте При этом осуществляется нелинейное перераспределение энергии шумоизлучения РПС Таким образом, уменьшается расстояние, с которого ММ обнаруживают РПС, занятое выборкой орудия лова с рыбой. Одновременно с этим акустический Также ММ не могут эффективно использовать приемный тракт биологического гидролокатора для приема биосигналов, отраженных от рыб, находящихся в выбираемом с глубины орудии лова. Блок управления обеспечивает последовательную работу всех указанных выше каналов бортовой системы РПС. Таким образом, осуществляется эффективное и длительное управление поведением ММ (включая косаток - ММ, не имеющих естественных В«хищниковВ») при промысле рыбы в диапазоне частот, снизу ограниченном верхней граничной частотой Известен способ управления поведением ММ при промысле рыбы, основанный на формировании, усилении, излучении информационных сигналов, воздействии информационных сигналов на ММ и изменении их поведенческих характеристик, при этом в качестве информационных сигналов используются сигналы В«конкурентаВ» и сигналы В«жертвыВ», модулированные доплеровскими сигналами, имитирующими движение В«конкурентаВ» и В«жертвыВ», информационные сигналы излучаются в течение определенных интервалов времени, а их диапазон снизу ограничен верхней граничной частотой диапазона частот наибольшей акустической чувствительности рыб - объекта промысла /1/. К недостаткам данного способа относится следующее. 1. Низкая эффективность из-за невозможности управления поведением всех ММ (например, косаток - не имеющих в природе В«хищниковВ»). 2. Низкая эффективность процесса управления поведением ММ из-за быстрой их адаптации к излучаемым сигналам. 3. Ограниченный объем водной среды, в котором осуществляется управление поведением ММ. 4. Невозможность управления поведением ММ, находящихся в непосредственной близости от РПС при выборке его орудия лова. Известен способ управления поведением ММ при промысле рыбы, основанный на формировании, усилении, излучении информационных и энергетических сигналов, воздействии информационных и энергетических сигналов на ММ и изменении их поведенческих характеристик; в качестве информационных сигналов используются гидроакустические сигналы, излучаемые выборочными устройствами, излучение информационных сигналов осуществляется непрерывно в период движения судна и в период постановки орудий лова в море, а энергетические сигналы излучаются в период подъема орудий лова на борт РПС при помощи пространственно разнесенных нескольких гидроакустических излучателей; в период подъема орудий лова на борт РПС информационные сигналы не излучаются, а энергетические сигналы излучаются непрерывно и маскируют гидроакустические сигналы, излучаемые выборочными устройствами; частотный диапазон информационных и энергетических сигналов снизу ограничен верхней граничной частотой диапазона частот наибольшей акустической чувствительности рыб - объекта промысла /2/. К недостаткам способа относится следующее. 1. Низкая эффективность процесса управления поведением ММ из-за быстрой их адаптации к излучаемым сигналам. 2. Низкая эффективность процесса управления поведением ММ из-за того, что не маскируются гидроакустические сигналы, излучаемые выбираемым орудием лова, судовыми системами, механизмами и др. 3. Ограниченный объем водной среды, в котором осуществляется управление поведением ММ. 4. Невозможность управления поведением ММ, находящихся в непосредственной близости от РПС при выборке его орудия лова. Наиболее близким по технической сущности к заявляемому относится способ (выбранный в качестве способа-прототипа) управления поведением ММ при промысле рыбы, основанный на формировании, усилении и излучении информационных и энергетических сигналов, воздействии информационных и энергетических сигналов на ММ и изменении их поведенческих характеристик; излучение информационных сигналов осуществляется непрерывно в период движения РПС и в период постановки орудий лова в море, а энергетические сигналы излучаются в период подъема орудий лова на борт РПС, при этом в период подъема орудий лова на борт РПС информационные сигналы не излучаются; частотный диапазон информационных и энергетических сигналов ограничен снизу верхней граничной частотой диапазона частот наибольшей акустической чувствительности рыб - объекта промысла; в качестве информационных сигналов используются гидроакустические сигналы, излучаемые выбираемыми орудиями лова, корпусом РПС, а также судовыми системами и механизмами, в том числе и выборочными устройствами; в качестве энергетических сигналов используются широкополосные гидроакустические сигналы, излучаемые при помощи пространственно разнесенных нескольких ненаправленных широкополосных гидроакустических излучателей и маскирующих гидроакустические сигналы, излучаемые выбираемыми орудиями лова, корпусом РПС, а также судовыми системами и механизмами, в том числе и выборочными устройствами, а также два тональных гидроакустических сигнала ультразвукового диапазона частот (УЗД) на близких частотах, излучаемых в сторону MM - объекта управления, в диапазоне частот максимальной акустической чувствительности ММ при помощи направленного излучателя УЗД частот, при этом разностная частота двух тональных гидроакустических сигналов УЗД диапазона частот находится в инфразвуковом диапазоне (ИЗД) частот, воздействует на внутренние органы ММ и дополнительно изменяет их поведенческие характеристики /3/. К недостаткам способа-прототипа относится следующее. 1. Недостаточная эффективность процесса управления поведением ММ из-за того, что подводные шумы РПС, занятого промыслом рыбы ярусами и ставными неводами, резко отличаются от подводных шумов других судов, находящихся в районе промысла и обитания ММ. 2. Недостаточная эффективность процесса управления поведением ММ из-за того, что демаскирующие РПС гидроакустические сигналы имеют высокий интегральный уровень. 3. Недостаточная эффективность управления поведением ММ, находящихся в непосредственной близости от РПС при выборке его орудия лова. Поставленная цель достигается тем, что в известном способе управления поведением ММ при промысле рыбы, основанном на формировании, усилении и излучении информационных сигналов, воздействии сигналов на ММ и изменении их поведенческих характеристик, при этом частотный диапазон сигналов ограничен снизу верхней граничной частотой диапазона частот наибольшей акустической чувствительности рыб - объекта промысла, а в качестве сигналов используются: широкополосные гидроакустические сигналы, излучаемые при помощи пространственно разнесенных нескольких широкополосных гидроакустических излучателей и маскирующие гидроакустические сигналы, излучаемые выбираемыми орудиями лова, корпусом РПС, а также судовыми системами и механизмами, в том числе и выборочными устройствами; два тональных гидроакустических сигнала УЗД частот на близких частотах, излучаемых в диапазоне частот максимальной акустической чувствительности MM при помощи направленного излучателя УЗД частот, при этом разностная частота двух тональных гидроакустических сигналов УЗД частот находится в инфразвуковом диапазоне частот, воздействует на внутренние органы ММ и дополнительно изменяет их поведенческие характеристики; в качестве широкополосных гидроакустических сигналов используются сигналы, излучаемые выбираемыми орудиями лова, корпусом РПС, а также судовыми системами и механизмами, в том числе и выборочными устройствами, рыбопромысловых судов, занятых другими видами промысла: промыслом беспозвоночных и донной - при помощи ловушек, промыслом пелагической и донной рыбы, а также беспозвоночных - при помощи трала, а также танкеров, транспортно-рефрежираторных и судов другого назначения, ранее переоборудованных рыбопромысловых судов; при этом происходит дезориентация ММ во всем районе промысла, они напрасно подходят к каждому судну, и у них тормозится ранее выработанный условный рефлекс: В«характерный звук судна - легкодоступная пища, находящаяся в выбираемом с глубины орудии ловаВ»; излучение широкополосных гидроакустических сигналов осуществляется при помощи излучателей, расположенных на корпусе РПС; два тональных гидроакустических сигнала УЗД частот излучаются в пространственном секторе выбираемого орудия лова: ярус, донная сеть и др.; дополнительно в качестве сигналов используются: третий тональный гидроакустический сигнал УЗД частот, излучаемый в сторону кильватерного следа РПС, в диапазоне частот звукоподводной связи ММ при помощи второго направленного излучателя УЗД частот, а также тональный электромагнитный сигнал УЗД частот, излучаемый в область кильватерного следа РПС, при этом осуществляется нелинейное перераспределение энергии шумоизлучения РПС из области инфразвуковых и звуковых частот в область частоты третьего тонального гидроакустического сигнала УЗД частот и тонального электромагнитного сигнала УЗД частот, происходит частичное уменьшение уровня гидроакустических сигналов, излучаемых выбираемыми орудиями лова, корпусом РПС, а также его судовыми системами и механизмами, в том числе и выборочными устройствами и соответственно уменьшается расстояние, с которого ММ обнаруживают РПС, занятое выборкой орудия лова с рыбой, а также осуществляется подавление канала звукоподводной связи MM - они не могут передать своим сородичам, находящимся на удалении до нескольких десятков километров, информацию о появлении легкодоступной пищи, находящейся в выбираемых с глубины орудиях лова; дополнительно в нижней носовой части рабочего борта РПС со стороны выбираемого орудия лова осуществляется формирование под водой завесы пузырьков с диаметрами, близкими к резонансным частотам поглощения энергии гидроакустических сигналов, излучаемых выбираемым орудием лова и выборочными устройствами РПС, при этом происходит частичное уменьшение уровня гидроакустических сигналов, излучаемых выбираемыми орудиями лова и выборочными устройствами и соответственно уменьшается расстояние, с которого ММ обнаруживают РПС, занятое выборкой орудия лова с рыбой. Для повышения эффективности процесса управления поведением ММ, гидроакустические сигналы РПС, занятого промыслом рыбы ярусами, ставными неводами др., и резко отличающиеся от гидроакустических сигналов других судов, находящихся в районе промысла с ММ, поочередно маскируются широкополосными гидроакустическими сигналами, излучаемыми выбираемыми орудиями лова, корпусом РПС, а также судовыми системами и механизмами, в том числе и выборочными устройствами, РПС, занятых другими видами промысла: промыслом беспозвоночных и донной - при помощи ловушек, промыслом пелагической и донной рыбы, а также беспозвоночных - при помощи трала, а также танкеров, транспортно-рефрежираторных и судов другого назначения, ранее переоборудованных рыбопромысловых судов. При этом происходит дезориентация ММ во всем районе промысла, они напрасно подходят к каждому судну, и у них тормозится ранее выработанный условный рефлекс: В«характерный звук РПС - легкодоступная пища, находящаяся в выбираемом с глубины орудии ловаВ». Для повышения эффективности процесса управления поведением ММ поочередное излучение широкополосных гидроакустических сигналов осуществляется уже на подходе к району промысла с ММ и продолжатся до окончания промысла при помощи гидроакустических излучателей, расположенных на корпусе РПС. Для повышения эффективности процесса управления поведением ММ путем уменьшения интегрального уровня гидроакустических сигналов, демаскирующих, перед ММ рыбопромысловое судно, используются: третий тональный гидроакустический сигнал УЗД частот, излучаемый в сторону кильватерного следа РПС, в диапазоне частот звукоподводной связи ММ при помощи второго направленного излучателя УЗД частот, а также тональный электромагнитный сигнал УЗД частот, излучаемый в область кильватерного следа РПС при помощи электромагнитного излучателя. При этом осуществляется нелинейное перераспределение энергии шумоизлучения РПС из области инфразвуковых и звуковых частот в область частоты третьего тонального гидроакустического сигнала УЗД частот и тонального электромагнитного сигнала УЗД частот, происходит частичное уменьшение уровня гидроакустических сигналов, излучаемых выбираемыми орудиями лова, корпусом РПС, а также его судовыми системами и механизмами, в том числе и выборочными устройствами. Таким образом, уменьшается расстояние, с которого ММ обнаруживают РПС, занятое выборкой орудия лова с рыбой. Для повышения эффективности процесса управления поведением ММ путем уменьшения интегрального уровня гидроакустических сигналов, демаскирующих, перед ММ рыбопромысловое судно, в нижней носовой части рабочего борта РПС со стороны выбираемого орудия лова осуществляется формирование путем нагнетания компрессором воздуха по трубе, заканчивающейся с противоположной стороны диспергатором, под водой завесы пузырьков с диаметрами, близкими к резонансным частотам поглощения энергии гидроакустических сигналов, излучаемых выбираемым орудием лова и выборочными устройствами РПС. При этом происходит частичное уменьшение уровня гидроакустических сигналов, излучаемых выбираемыми орудиями лова и выборочными устройствами. То есть уменьшается расстояние, с которого ММ обнаруживают РПС, занятое выборкой орудия лова с рыбой. Для повышения эффективности управления поведением ММ, находящихся в непосредственной близости от РПС при выборке его орудия лова, два тональных гидроакустических сигнала УЗД частот излучаются в пространственном секторе ±30 градусов в вертикальной и горизонтальной плоскостях от выбираемого орудия лова: ярус, ставной невод и др. Для повышения эффективности управления поведением ММ, находящихся в непосредственной близости от РПС при выборке его орудия лова, используются: третий тональный гидроакустический сигнал УЗД частот, излучаемый в сторону кильватерного следа РПС, в диапазоне частот звукоподводной связи ММ при помощи второго направленного излучателя УЗД частот, а также тональный электромагнитный сигнал УЗД диапазона частот, излучаемый в область кильватерного следа РПС при помощи электромагнитного излучателя. При этом осуществляется нелинейное перераспределение энергии шумоизлучения РПС из области инфразвуковых и звуковых частот в область частоты третьего тонального гидроакустического сигнала УЗД частот и тонального электромагнитного сигнала УЗД частот. Таким образом, осуществляется подавление канала звукоподводной связи MM - они не могут передать своим сородичам, находящимся на удалении до нескольких десятков километров, информацию о появлении легкодоступной пищи, находящейся в выбираемых с глубины орудиях лова. Отличительными признаками заявляемого способа являются следующие. 1. В качестве широкополосных гидроакустических сигналов используются сигналы, излучаемые выбираемыми орудиями лова, корпусом РПС, а также судовыми системами и механизмами, в том числе и выборочными устройствами, рыбопромысловых судов, занятых другими видами промысла: промыслом беспозвоночных и донной - при помощи ловушек, промыслом пелагической и донной рыбы, а также беспозвоночных - при помощи трала, а также танкеров, транспортно-рефрежираторных и судов другого назначения, ранее переоборудованных рыбопромысловых судов. 2. Излучение широкополосных гидроакустических сигналов осуществляется при помощи излучателей, расположенных на корпусе РПС. 3. Два тональных гидроакустических сигнала УЗД частот излучаются в пространственном секторе выбираемого орудия лова. 4. Дополнительно в качестве сигналов используются третий тональный гидроакустический сигнал УЗД частот, излучаемый в сторону кильватерного следа РПС, в диапазоне частот звукоподводной связи ММ при помощи второго направленного излучателя УЗД частот. 5. Дополнительно в качестве сигналов используются тональный электромагнитный сигнал УЗД частот, излучаемый в область кильватерного следа РПС при помощи излучателя. 6. Дополнительно в нижней носовой части рабочего борта РПС со стороны выбираемого орудия лова осуществляется формирование под водой завесы пузырьков с диаметрами, близкими к резонансным частотам поглощения энергии гидроакустических сигналов, излучаемых выбираемым орудием лова и выборочными устройствами РПС. Наличие отличительных от прототипа признаков позволяет сделать вывод о соответствии заявляемого способа критерию "новизна". Анализ известных технических решений с целью обнаружения в них указанных отличительных признаков, показал следующее. Признаки 5 является новыми и неизвестно их использование для управления поведением ММ, включая косаток, в процессе промысла рыбы. Признаки 1-4 и 6 является новыми и неизвестно их использование для управления поведением ММ, включая косаток, в процессе промысла рыбы. В то же время в прикладной гидроакустике известно использование признаков 1, 2, 4 и 6 - для акустической маскировки подводных шумов одного корабля подводными шумами другого корабля (признаки - 1 и 2); для искажения характера спектра подводных шумов судна - признак 4 и для уменьшения акустической заметности подводного корабля - признак 6. В нелинейной акустике известно использование признака 3 - для формирования низкочастотной волны разностной частоты. Таким образом, наличие новых существенных признаков, в совокупности с известными, обеспечивает появление у заявляемого решения нового свойства, не совпадающего со свойствами известных технических решений - в течение заданного интервала времени эффективно управлять поведением ММ, включая косаток, при промысле рыбы путем формирования, усиления и излучения сигналов в диапазоне частот, снизу ограниченном верхней граничной частотой диапазона частот наибольшей акустической чувствительности рыб - объекта промысла. В данном случае мы имеем новую совокупность признаков и их новую взаимосвязь, причем не простое объединение новых признаков и уже известных в гидроакустике, а именно выполнение операций в предложенной последовательности и приводит к качественно новому эффекту. Данное обстоятельство позволяет сделать вывод о соответствии разработанного способа критерию "существенные отличия". На фиг.1 и 2 представлены функциональная и структурная схемы, соответственно устройства, с помощью которого реализуется разработанный способ управления поведением ММ при промысле рыбы. Устройство содержит бортовую систему (1), расположенную на РПС (2). При этом РПС содержит: выборочное устройство (3), подруливающее устройство (4), гребной винт (5) формирующий кильватерный след (6), содержащий пузырьки воздуха (7) различного диаметра; компрессор (8), выход которого соединен с металлической трубой (9), имеющей, в свою очередь, на своем выходе диспергатор (10) для подачи пузырьков воздуха (11) заданного диаметра под воду в носовой части РПС (2). Кроме того, в состав устройства входят: орудие лова (12), рыба (13) - объект промысла и ММ (14) - объект управления. Бортовая система (1) включает в себя: канал формирования, усиления и излучения широкополосных гидроакустических сигналов (15), первый канал формирования, усиления и излучения гидроакустических сигналов УЗД частот (16), второй канал формирования, усиления и излучения гидроакустического сигнала УЗД частот (17), канал формирования, усиления и излучения электромагнитного сигнала УЗД частот (18), блок (19) управления работой указанных выше каналов бортовой системы (1). Канал формирования, усиления и излучения широкополосных гидроакустических сигналов (15) содержит последовательно электрически соединенные блок формирования широкополосных гидроакустических сигналов (20), многоканальный, по числу излучателей широкополосных гидроакустических сигналов, усилитель мощности (21) и излучатели (22) широкополосных гидроакустических сигналов, расположенные на корпусе РПС (2). Первый канал формирования, усиления и излучения гидроакустических сигналов УЗД частот (16) содержит последовательно электрически соединенные блок (20) формирования гидроакустических сигналов УЗД частот, двухканальный усилитель мощности (21) и направленный излучатель (22) гидроакустических сигналов УЗД частот, расположенный на корпусе РПС (2) в районе выборочного устройства (3). Второй канал формирования, усиления и излучения гидроакустического сигнала УЗД частот (17) содержит последовательно электрически соединенные генератор (26) гидроакустических сигналов УЗД частот, усилитель мощности (27) и направленный излучатель (28) гидроакустических сигналов УЗД частот, расположенный на корпусе РПС (2) в районе кормы. Канал (18) формирования, усиления и излучения электромагнитного сигнала УЗД частот содержит последовательно электрически соединенные блок (29) формирования электромагнитных сигналов УЗД частот, усилитель (30) электромагнитных сигналов и направленный излучатель (31) электромагнитных сигналов УЗД частот, расположенный на корпусе РПС (2) в его кормовой части. Блок управления (19) управляет работой указанных выше каналов бортовой системы (1) соединен своими соответствующими выходами с входом блока формирования широкополосных гидроакустических сигналов (20), с входом блока (20) формирования гидроакустических сигналов УЗД частот, с входом генератора (26) гидроакустических сигналов УЗД частот и с входом блока (29) формирования электромагнитных сигналов УЗД частот. Устройство функционирует следующим образом (фиг.1, 2). До подхода РПС (2) к району промысла (и далее - до окончания промысла), в канале формирования, усиления и излучения широкополосных гидроакустических сигналов (15) с помощью блока (20) осуществляется формирование широкополосных гидроакустических сигналов на частоте Морские млекопитающие, имеющие дальность действия своего биологического шумопеленгатора ˜70 км и более (в зависимости от гидролого-акустических и помехосигнальных условий данного географического района) и поджидающие на кромке района подходящие рыбопромысловые суда, не будут реагировать на гидроакустические сигналы (подводные шумы) данного РПС, акустически замаскированного (например) под тарнспортно-рефрежираторное судно. Таким образом, осуществляется дезориентация ММ в районе промысла и торможение ранее выработанного у них условного рефлекса: В«характерный звук РПС - легкодоступная пища, находящаяся в выбираемом с глубины орудии ловаВ». Перед подходом к выбираемому орудию лова в районе промысла во втором канале (17) формирования, усиления и излучения гидроакустического сигнала УЗД частот при помощи генератора (26) осуществляется формирование гидроакустического сигнала УЗД на частоте При этом осуществляется нелинейное перераспределение энергии шумоизлучения РПС из области инфразвуковых и звуковых частот Таким образом, уменьшается расстояние, с которого ММ обнаруживают РПС, занятое выборкой орудия лова с рыбой. Одновременно с этим, и также для уменьшения интегрального уровня гидроакустических сигналов Однако на промысле нередко возникает ситуация, при которой ММ выходят на РПС, занятое выборкой орудия лова с рыбой, случайно (не приманиваемые характерными звуками РПС) - в процессе своей естественной миграции по данному географическому району. В этом случае, для повышения эффективности управления поведением ММ, находящихся в непосредственной близости от РПС при выборке его орудия лова, в первом канале (16) формирования, усиления и излучения гидроакустических сигналов УЗД частот с помощью блока (20) осуществляется формирование гидроакустических сигналов УЗД частот Одновременно с этим в канале (18) формирования, усиления и излучения электромагнитного сигнала УЗД частот с помощью блока (29) осуществляется формирование электромагнитного сигнала УЗД на частоте При этом осуществляется нелинейное перераспределение энергии шумоизлучения РПС Таким образом, уменьшается расстояние, с которого ММ обнаруживают РПС, занятое выборкой орудия лова с рыбой. Одновременно с этим акустический Также ММ не могут эффективно использовать приемный тракт биологического гидролокатора для приема биосигналов, отраженных от рыб, находящихся в выбираемом с глубины орудии лова. Таким образом, осуществляется эффективное и длительное управление поведением ММ (включая косаток - ММ, не имеющих естественных В«хищниковВ») при промысле рыбы в диапазоне частот, снизу ограниченном верхней граничной частотой Для примера на фиг.3 индексами В«1В», В«2В», В«3В» и В«4В» обозначены интегральные уровни подводных шумов судна-ярусолова (индекс В«1В») в момент выборки орудия лова; судна, занятого промыслом беспозвоночных с помощью порядка ловушек (индекс В«2В»); транспортно-рефрежираторного судна (индекс В«3В») на типовой скорости движения и судна, занятого промыслом беспозвоночных с помощью трала (индекс В«4В»). Как видно из фиг.4, интегральный уровень подводных акустических шумов судна-ярусолова в момент выборки орудия лова (индекс В«1В») в диапазоне частот от 20 Гц до 10 кГц полностью перекрывается аналогичным параметром указанных выше судов. На фиг.4 представлены диапазоны частот наибольшей акустической чувствительности некоторых промысловых рыб /4, 5/. Как видно из фиг.4, частотный диапазон сигналов, используемых для в управления поведением ММ при промысле рыбы, должен быть ограничен частотами ˜20...30 Гц (сверху) и ˜500...600 Гц (снизу) - для трески, ˜20...30 Гц (сверху) и ˜3 кГц - для сельди и т.д. На фиг.4, для примера, приведены также нижние граничные частоты акустической чувствительности некоторых ММ (дельфина и косатки) - объекта управления /6, 7/. Из фиг.4 видно, что у косаток, в отличие от дельфинов, нижняя часть диапазона максимальной акустической чувствительности практически полностью перекрывает диапазоны акустической чувствительности указанных на фиг.4 рыб - объекта промысла. Это необходимо учитывать при формировании сигналов управления поведением конкретного вида ММ (косатки, дельфина, сивуча, нерпы и т.д.). На фиг.5 представлены спектрограммы подводных шумов РПС без излучения (индекс В«аВ») и с непрерывным излучением тонального гидроакустического сигнала УЗД на частоте Как видно из фиг.5, в спектрограммах можно выделить 5 условных участков, на которых наблюдается изменение (уменьшение или увеличение) интегрального уровня подводных шумов РПС. При этом на первом (индекс В«1В») и втором (индекс В«2В») участках происходит снижение (рис.5б) ˜ на 30-35 дБ и ˜ на 10-15 дБ соответственно, в то время как на четвертом (индекс В«4В») и пятом (индекс В«5В») участках происходит увеличение (рис.5а) ˜ на 10-15 дБ и ˜ на 20-25 дБ соответственно, интегрального уровня подводных шумов РПС при излучении сигнала на частоте Таким образом, осуществляется нелинейное перераспределение (транспониация спектра /8/) энергии шумоизлучения РПС из области инфразвуковых, низких звуковых и звуковых частот в область частоты третьего тонального гидроакустического сигнала УЗД диапазона частот и тонального электромагнитного сигнала УЗД частот. При этом происходило частичное уменьшение уровня гидроакустических сигналов, излучаемых выбираемыми орудиями лова и РПС. То есть уменьшалось расстояние, с которого ММ обнаруживают РПС, занятое выборкой орудия лова с рыбой. Повышение эффективности процесса управления поведением ММ достигнуто за счет того, что уменьшение интегрального уровня гидроакустических сигналов, демаскирующих перед ММ рыбопромысловое судно, в нижней носовой части рабочего борта РПС со стороны выбираемого орудия лова осуществляется формирование под водой завесы пузырьков с диаметрами, близкими к резонансным частотам поглощения энергии гидроакустических сигналов, излучаемых выбираемым орудием лова и выборочными устройствами РПС. Данный физический эффект известен в прикладной гидроакустике /10/ и океанологии /11/. Однако, как уже отмечалось ранее, ММ используют не только биологический шумопеленгатор, но и биологический гидролокатор - для поиска и идентификации рыб - объекта питания, а также для звукоподводной связи со своими сородичами /6, 7/. Для примера, на фиг.6 индексами В«аВ» и В«бВ» обозначены спектрограммы сигналов, зарегистрированные при общении косаток между собой (индекс В«аВ») и при питании с помощью орудия лова (индекс В«бВ»). В этой связи на практике могут возникнуть ситуации, когда ММ случайно (например, в процессе своей естественной миграции и т.д.) приблизятся к РПС в момент выборки его орудий лова и В«увидятВ» рыбу при помощи своего биологического гидролокатора на небольшом расстоянии от себя. Тогда акустическая маскировка РПС или снижение интегрального уровня его подводных шумов оказываются малоэффективным - ММ продолжат свое движение к рыбе, находящейся в орудии лова. Для решения этой задачи в процессе реализации разработанного способа управления поведением ММ предусмотрено, в частности, излучение тонального гидроакустического Как видно из фиг.6г, излученные на частотах Для еще большего повышения эффективности управления поведением ММ, находящихся в непосредственной близости от судна при выборке его орудия лова, излучаются два тональных гидроакустических сигнала УЗД на частотах Известно /9/, что гидроакустические сигналы ИЗД (от 1 Гц до ˜20 Гц) и НЗД диапазонов частот (от ˜20 Гц до ˜400 Гц) В«неблагоприятноВ» воздействуют на все биологические объекты (в том числе и на ММ). Поэтому, если излучать какие-то гидроакустические сигналы достаточной интенсивности именно в этом диапазоне частот, то они также будут вызывать, как минимум, дискомфорт у косаток (в данном случае) и ММ (косатки) покинут эту область водного пространства. Морские испытания разработанного способа проводились в 2003, 2004 годах в Охотском и Беренговом морях и показали его высокую эффективность. В качестве объекта промысла использовался палтус, а в качестве MM - косатки. Повышение эффективности процесса управления поведением ММ достигнуто за счет того, что: 1. Гидроакустические сигналы РПС поочередно маскировались широкополосными гидроакустическими сигналами, излучаемыми выбираемыми орудиями лова, корпусом судна, а также судовыми системами и механизмами, в том числе и выборочными устройствами, промысловых судов, занятых другими видами промысла, а также танкеров, транспортно-рефрежираторных и судов другого назначения, ранее переоборудованных из РПС. 2. Излучение широкополосных гидроакустических сигналов осуществлялось уже на подходе к району промысла с ММ и продолжатся до окончания промысла при помощи излучателей, расположенных на корпусе РПС. 3. Уменьшение интегрального уровня гидроакустических сигналов, демаскирующих, перед ММ рыбопромысловое судно, достигнуто за счет использования третьего тонального гидроакустического сигнала УЗД частот, излучаемого в сторону кильватерного следа РПС судна, в диапазоне частот звукоподводной связи ММ при помощи второго направленного излучателя УЗД частот, а также тонального электромагнитного сигнала УЗД частот, излучаемого в область кильватерного следа РПС при помощи электромагнитного излучателя. 4. Уменьшение интегрального уровня гидроакустических сигналов, демаскирующих перед ММ рыбопромысловое судно, в нижней носовой части рабочего борта РПС со стороны выбираемого орудия лова осуществляется формирование под водой завесы пузырьков с диаметрами, близкими к резонансным частотам поглощения энергии гидроакустических сигналов, излучаемых выбираемым орудием лова и выборочными устройствами РПС. При этом происходило частичное уменьшение уровня гидроакустических сигналов, излучаемых выбираемыми орудиями лова и выборочными устройствами. То есть уменьшалось расстояние, с которого ММ обнаруживают РПС, занятое выборкой орудия лова с рыбой. 5. Два тональных гидроакустических сигнала УЗД частот излучались в пространственном секторе ±30 градусов в вертикальной и горизонтальной плоскостях от выбираемого орудия лова. 6. Использовались третий тональный гидроакустический и тональный электромагнитный сигналы УЗД частот, излучаемые соответствующими излучателями в сторону кильватерного следа РПС в диапазоне частот звукоподводной связи ММ. При этом следует заметить, то некоторые, наиболее осторожные ММ (например, сивучи), подходят к РПС, занятому выборкой орудия лова с рыбой, исключительно с кормы. Литература 1. Бахарев С.А. Способ управления поведением морских животных в процессе промысла рыбы. - Патент РФ №2213357 (заявка №2002102035), приоритет 21.01.02 г. 2. Бахарев С.А. Способ управления поведением морских животных при промысле рыбы. - Патент РФ №2218583 (заявка №2002104655), приоритет 20.02.02 г. 3. Бахарев С.А. Способ управления поведением морских млекопитающих при промысле рыбы. - Решение ФИПС от 13.10.04 г. о выдаче патента РФ на изобретение по заявке №2003133245 от 17.11.03 г. 4. Сорокин М.А. Слуховые способности некоторых дальневосточных рыб // Автореферат диссертации к.б.н., - М.: ИЭМЭЖ, 1984, 28 с. 5. Шишкова Е.В. Физические основы промысловой гидроакустики. - М.: Пищевая промышленность, 1977, с.233-239. 6. Вуд Ф.Г. Морские млекопитающие и человек / Перевод с английского под ред. А.А.Щербакова. - Л.: Гидрометеоиздат, 1979, 262 с. 7. J.D.Hal, C.S.Johnson Auditory thresholds of a killer whale Orcinus orca Linneaus. - JASA, 1972, v.51, №2, Pt.2, pp.515-517. 8. Новиков Б.К., Руденко О.В., Тимошенко В.И. Нелинейная гидроакустика. - Л.: Судостроение, 1981, с.12. 9. Довгуша В.В., Тихонов М.Н.. Кудрин И.Д. Биологическое действие низкоинтенсивных экологических факторов. - Экологические системы и приборы. - №1, 2002, с.37-39/. 10. Р. Дж Урик Основы гидроакустики. - Л.: Судостроение, 1978, с.261. 11. Акустика океана / Под ред. Л.М.Бреховских. - М.: Наука, 1974, с.55, 56. Формула изобретенияСпособ управления поведением морских млекопитающих при промысле рыбы, основанный на формировании, усилении и излучении сигналов, воздействии сигналов на морских млекопитающих и изменении их поведенческих характеристик, при этом частотный диапазон сигналов ограничен снизу верхней граничной частотой диапазона частот наибольшей акустической чувствительности рыб, в качестве сигналов используют широкополосные гидроакустические сигналы, два тональных гидроакустических сигнала ультразвукового диапазона частот на частотах, излучаемых в диапазоне частот максимальной акустической чувствительности морских млекопитающих при помощи направленного излучателя ультразвукового диапазона частот, при этом разностная частота двух тональных гидроакустических сигналов ультразвукового диапазона частот находится в инфразвуковом диапазоне частот, которые воздействуют на внутренние органы морских млекопитающих и дополнительно изменяют их поведенческие характеристики, отличающийся тем, что в качестве широкополосных гидроакустических сигналов используют сигналы, излучаемые выбираемыми орудиями лова, корпусом рыбопромыслового судна, а также судовыми системами и механизмами, в том числе и выборочными устройствами рыбопромысловых судов, занятых другими видами промысла, причем упомянутые широкополосные гидроакустические сигналы, кроме того, излучаются при помощи пространственно разнесенных широкополосных гидроакустических излучателей, расположенных на корпусе рыбопромыслового судна, два тональных гидроакустических сигнала ультразвукового диапазона частот излучаются в пространственном секторе выбираемого орудия лова, дополнительно используется третий тональный гидроакустический сигнал ультразвукового диапазона частот, излучаемый в сторону кильватерного следа рыбопромыслового судна в диапазоне частот звукоподводной связи морских млекопитающих при помощи второго направленного излучателя ультразвукового диапазона частот, а также тональный электромагнитный сигнал ультразвукового диапазона частот, излучаемый в область кильватерного следа рыбопромыслового судна с помощью излучателя, расположенного на корпусе рыбопромыслового судна в его кормовой части, дополнительно в нижней носовой части рабочего борта рыбопромыслового судна со стороны выбираемого орудия лова осуществляется формирование под водой завесы пузырьков с диаметрами, близкими к резонансным частотам поглощения энергии гидроакустических сигналов, излучаемых выбираемым орудием лова и выборочными устройствами рыбопромыслового судна, причем изменение поведенческих характеристик морских млекопитающих заключается в том, что они уходят из данного пространственного сектора. MM4A Досрочное прекращение действия патента из-за неуплаты в установленный срок пошлины за поддержание патента в силе Дата прекращения действия патента: 02.12.2008 Дата публикации: 20.05.2011 Популярные патенты: 2275804 Способ повышения продуктивности птицы ... образом изменилась и динамика доступности энергии корма для обмена. Неизменные значения концентрации обменной энергии в рационе контрольной и II опытной группах 12,68-12,71 и 12,93-12,97 МДж/СВ отмечались нами на фоне хорошо выраженного роста данного показателя в I опытной группе в среднем на 0,44-0,48 МДж/кг.Таким образом, изменилась и динамика доступности энергии корма для обмена. Неизменные значения концентрации обменной энергии в рационе контрольной и II опытной группах 12,68-12,71 и 12,93-12,97 МДж/кг СВ отличались нами на фоне хорошо выраженного роста данного показателя в I опытной группе, в среднем на 0,44-0,48 МДж/кг.Объяснение данного факта на наш взгляд кроется в ... 2490869 Способ направленного изменения циркуляции воздушных масс и связанных с ней погодных условий ... n=3-4) ионизаторов 1, за несколько часов деформируется атмосферный фронт или рассеивается фронтальная облачная масса в радиусе до нескольких сотен км. При увеличении количества ионизаторов, входящих в блок, можно осуществить ионизацию атмосферного воздуха до более высокого значения, равного nH ед. в куб. см, т.е. пропорционального количеству n ионизаторов, входящих в блок, и добиться образования более мощного объемного заряда, и как показывает практика, большего по масштабу атмосферного возмущения, достигающего мезомасштабного значения. В этом случае концентрацию ионов в воздухе можно варьировать в большем диапазоне и достигать значений - 3.106 ед. в кв. см. и более.Располагая ... 2146444 Способ выявления и отбора стрессоустойчивых животных ... разведения являются животные с оценкой поведения 3-3. Недостатком прототипа является ограниченность объема использования только для одного вида животных - овец, а также достаточно низкая точность выявления стрессоустойчивых животных, так как тестирование в группе снижает у них мотивацию страха и оборонительное реагирование на человека (эффект "социальной фасилитации") [Boissy A. Fear and fearfulness in determining behaviour // In: "Genetics and the Behavior of Domestic Animals" Ed. T. Grandin. Academic Press. 1998. P. 113-144] и маскирует проявление генотипической изменчивости оборонительного поведения. Целью предлагаемого изобретения является повышение эффективности этологического ... 2248687 Способ весеннего боронования озимых культур и зубовая борона для его осуществления ... и увеличится его скорость. Если рабочая часть зуба изогнута относительно его вертикальной плоскости на угол, который менее 15°, то эта эффективность мало обнаруживается, а при угле более 30° скольжение будет излишним, а напряжения растяжения недостаточными для возникновения процесса крошения.Дальнейшее внедрение рабочей части зуба в почвенную корку вызовет ее деформацию в направлении снизу влево и снизу вправо благодаря конической боковой поверхности рабочей части зуба и расположению больших осей эллипсов стержневой и изогнутой рабочей частей по ходу движения бороны. Эта деформация постепенно увеличит количество мелких трещин в почве, а затем разрушит почвенные ... 2294617 Устройство для отрезания и погрузки силоса и сенажа ... - ручное изменение шага расстановки зубьев, что повышает трудозатраты и снижает эффективность работы погрузчика. Задачей предлагаемого изобретения является снижение трудозатрат и повышение эффективности работы погрузчика.Техническим результатом предлагаемого изобретения является снижение сопротивлений, возникающих при изменении шага расстановки зубьев вил, и обеспечение равномерного симметричного перемещения звеньев шарнирно-рычажного механизма.Поставленная задача достигается в устройстве для отрезания и погрузки силоса и сенажа, содержащем раму с горизонтальными вилами, П-образный нож, состоящий из жестко соединенных между собой фронтального и двух боковых режущих элементов, ... |
Еще из этого раздела: 2440708 Комбинированное устройство для ротационного внутрипочвенного рыхления 2475025 Средство для обработки семян зерновых и зернобобовых культур, пораженных фузариозом 2295848 Способ дезинсекции и дезинфекции материалов зернового происхождения и устройство для его осуществления 2192734 Устройство для производства прессованных кип из корней лекарственных растений 2201663 Устройство для ориентированной посадки лука 2453090 Способ минимальной обработки почвы 2154629 Производные оксима, способ их получения, фунгицидное средство и способ борьбы с грибковыми заболеваниями 2229213 Способ регулирования роста зерновых культур 2163071 Способ определения потенциальной соленостной толерантности водных беспозвоночных 2305931 Способ регенерации растений клевера лугового при генетической трансформации |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||
 i (i=1 - РПС, занятое промыслом беспозвоночных с помощью ловушек, i=2 - транспортно-рефрежираторное судно, i=3 - РПС, занятое промыслом беспозвоночных с помощью трала и т.д.), в зависимости от конкретной тактической обстановке в районе промысла.
i (i=1 - РПС, занятое промыслом беспозвоночных с помощью ловушек, i=2 - транспортно-рефрежираторное судно, i=3 - РПС, занятое промыслом беспозвоночных с помощью трала и т.д.), в зависимости от конкретной тактической обстановке в районе промысла. =
=