Способ автовождения сельхозагрегатаПатент на изобретение №: 2025924 Автор: Черняков Феликс Аронович[UA] Патентообладатель: Черняков Феликс Аронович[UA] Дата публикации: 9 Января, 1995 Изображения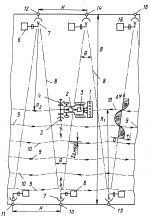 Использование: в сельском хозяйстве, в частности в способах автовождения с/х агрегатами. Сущность изобретения: способ включает размещение на местности ориентиров, определение положения с/х агрегата по разности фаз, излучаемых с него и переизлучаемых от ориентиров сигналов, формирование управляющих сигналов следящей системы автовождения и корректирование по ним курса с/х агрегата. Ориентиры размещают на противоположных сторонах по краям плантации одинарными рядами четными и нечетными с продольным смещением на половину интервала противоположного ряда. С/х агрегат направляют по эквидистантным квазипрямым линиям, соединенным внешними сопряжениями дуг окружностей, центры которых совпадают с ориентирами на противоположных сторонах плантации поочередно по ходу движения с/х агрегата. Переизлучают сигналы волны поочередно ориентирами противоположных сторон плантации и последовательно по ходу движения с/х агрегата. 1 з.п. ф-лы, 1 ил. Изобретение относится к сельскохозяйственному производству, в частности к способам автоматического вождения сельхозагрегатов на плантации, снабженной ориентирами, например ретрансляторами, переизлучающими электромагнитные волны к сельхозагрегату. Известны способы вождения сельхозагрегата вдоль изофаз электромагнитного поля, формируемых радионавигационными системами, при которых автовождение по изофазам осуществляют с существенным нарушением эквидистантности смежных проходов, их прямолинейности или точности и простоты определения положения квазипрямолинейных траекторий из-за значительного удаления ретрансляторов от границ плантации и необходимости дистанционно (из сельхозагрегата) изменять на точно рассчитанную величину частоту одного из удаленных ретрансляторов при каждом новом проходе сельхозагрегата по смежной эквидистантной траектории и для каждого прохода отличающуюся от предыдущей. Известен также способ автовождения сельхозагрегата, включающий размещение на местности ориентиров, определение положения на плантации движущегося сельхозагрегата по разности фаз излучаемых с него и переизлучаемых от ориентиров электромагнитных волн, формирование в соответствии с этим управляющих сигналов следящей системы автовождения и корректирования по ним курса сельхозагрегата на круговых эквидистантных траекториях, который целесообразно принять за прототип. По этому способу определяют расстояния от центра дуг окружностей до сельхозагрегата на очередном рабочем проходе по соответствующей дуге фазовым методом. Фаза  распространяющейся в пространстве электромагнитной волны пропорциональна пройденному ею расстоянию r и изменяется по периодическому закону. Измеряя изменение (запаздывание) фазы напряженности электрического (магнитного) поля волны, прошедшей путь от ведущей станции на сельхозагрегате до переизлучающего ориентира и обратно, относительно фазы излучаемой волны, определяют соответствующее ей расстояние r (без раскpытия неопpеделенности пеpиодической функции) r = распространяющейся в пространстве электромагнитной волны пропорциональна пройденному ею расстоянию r и изменяется по периодическому закону. Измеряя изменение (запаздывание) фазы напряженности электрического (магнитного) поля волны, прошедшей путь от ведущей станции на сельхозагрегате до переизлучающего ориентира и обратно, относительно фазы излучаемой волны, определяют соответствующее ей расстояние r (без раскpытия неопpеделенности пеpиодической функции) r =  , (1) где , (1) где  - длина волны электpомагнитного излучения; l - запаздывание фаз. При этом заданные траектории соответствуют дугам окружностей, радиусы R которых равны R = N - длина волны электpомагнитного излучения; l - запаздывание фаз. При этом заданные траектории соответствуют дугам окружностей, радиусы R которых равны R = N  = const, (2) где N - число целых циклов запаздывания фазы l, Недостаток такого способа заключается в том, что при размещении переизлучающего ориентира на краю плантации или близко от него траектории сельхозагрегата представляют собой явно выраженные дуги окружностей, что не согласуется с технологиями возделывания многих, прежде всего пропашных, культур, по которым посев производят поперек направления пахоты на прямоугольных, как правило, плантациях. При значительном удалении переизлучающего ориентира от плантации изофазная дуга в пределах длины плантации приближается к прямой линии и ее радиус R определяется формулой R = = const, (2) где N - число целых циклов запаздывания фазы l, Недостаток такого способа заключается в том, что при размещении переизлучающего ориентира на краю плантации или близко от него траектории сельхозагрегата представляют собой явно выраженные дуги окружностей, что не согласуется с технологиями возделывания многих, прежде всего пропашных, культур, по которым посев производят поперек направления пахоты на прямоугольных, как правило, плантациях. При значительном удалении переизлучающего ориентира от плантации изофазная дуга в пределах длины плантации приближается к прямой линии и ее радиус R определяется формулой R =  + +  , (3) где L - длина гона на плантациях, например сахарной свеклы составляет в сpеднем 900 м; - отклонение рядков культуры от прямой линии. Вычисления по формуле (3) показывают, что для отклонения, например, , (3) где L - длина гона на плантациях, например сахарной свеклы составляет в сpеднем 900 м; - отклонение рядков культуры от прямой линии. Вычисления по формуле (3) показывают, что для отклонения, например,  1 м при автоматическом вождении по принятому за прототип способу R 1 м при автоматическом вождении по принятому за прототип способу R  50,6 км. На такой дальности существенно уменьшается точность ее измерения, тем более измерение прямым лучом в условиях агрозоны (лесополосы, постройки, макрорельеф) практически невозможно. Но именно повышение точности измерений - необходимое условие экономической целесообразности применения дополнительного оборудования для автоматизации вождения сельхозагрегата и, прежде всего, на возделывании таких требовательных к точности технологии культур, как сахарная свекла. Пока же (из-за низкой точности ручного вождения культиваторного агрегата) оставляют необработанной защитную зону рядка шириной не менее 20...18 см, а сорняки вырезают всего на 45-55% площади междурядий и не добирают поэтому в среднем по Союзу 124 ц сахарной свеклы с гектара или 1,5 т сахара. Целью изобретения является повышение точности автовождения по квазипрямым траекториям. Достигают цель тем, что размещают ориентиры с противоположных сторон по краям плантации одинарными рядами с продольным смещением на половину интервала противоположного ряда и направляют сельхозагрегат по эквидистантным линиям соединенных внешними сопряжениями дуг окружностей, центры которых совпадают с ориентирами на противоположных сторонах плантации поочередно по ходу движения сельхозагрегата. Достигают цель еще и тем, что переизлучают электромагнитные волны поочередно от ориентиров противоположных сторон плантации и последовательно по ходу движения сельхозагрегата. Сущность изобретения заключается в том, что излучением электромагнитных волн с движущегося сельхозагрегата и переизлучением их поочередно от рядков ориентиров противоположных сторон плантации формируют эквидистантные изофазные линии, представляющие собой изодальние от ориентиров последовательности дуг окружностей, соединенных друг с другом внешними сопряжениями в квазипрямые траектории сельхозагрегата, отклоняющиеся от идеальной прямой линии не более чем на заданную величину max . Анализ показывает, что max= 0,5B 50,6 км. На такой дальности существенно уменьшается точность ее измерения, тем более измерение прямым лучом в условиях агрозоны (лесополосы, постройки, макрорельеф) практически невозможно. Но именно повышение точности измерений - необходимое условие экономической целесообразности применения дополнительного оборудования для автоматизации вождения сельхозагрегата и, прежде всего, на возделывании таких требовательных к точности технологии культур, как сахарная свекла. Пока же (из-за низкой точности ручного вождения культиваторного агрегата) оставляют необработанной защитную зону рядка шириной не менее 20...18 см, а сорняки вырезают всего на 45-55% площади междурядий и не добирают поэтому в среднем по Союзу 124 ц сахарной свеклы с гектара или 1,5 т сахара. Целью изобретения является повышение точности автовождения по квазипрямым траекториям. Достигают цель тем, что размещают ориентиры с противоположных сторон по краям плантации одинарными рядами с продольным смещением на половину интервала противоположного ряда и направляют сельхозагрегат по эквидистантным линиям соединенных внешними сопряжениями дуг окружностей, центры которых совпадают с ориентирами на противоположных сторонах плантации поочередно по ходу движения сельхозагрегата. Достигают цель еще и тем, что переизлучают электромагнитные волны поочередно от ориентиров противоположных сторон плантации и последовательно по ходу движения сельхозагрегата. Сущность изобретения заключается в том, что излучением электромагнитных волн с движущегося сельхозагрегата и переизлучением их поочередно от рядков ориентиров противоположных сторон плантации формируют эквидистантные изофазные линии, представляющие собой изодальние от ориентиров последовательности дуг окружностей, соединенных друг с другом внешними сопряжениями в квазипрямые траектории сельхозагрегата, отклоняющиеся от идеальной прямой линии не более чем на заданную величину max . Анализ показывает, что max= 0,5B  1- cosarctg 1- cosarctg  , (4) где В - ширина плантации; Н - расстояние между ориентирами в ряду. Поэтому, например, при В = 1000 м и Н = 125 м - max = 0,97 м < 1,0 м, что соизмеримо с отклонениями рядков сахарной свеклы от прямой линии при ручном вождении посевного агрегата и вполне приемлемо по затратам на обустройство плантации ориентирами. Положительный эффект получают за счет точного повторения при междурядной обработке, например, сахарной свеклы, траекторий посевного агрегата при автовождении на посеве и культивациях, что позволяет в несколько раз уменьшить защитную зону и довести обрабатываемую площадь междурядий при культивациях до 80-90%, и, следовательно, повысить урожай свеклы и сбор сахара. Известно устройство для измерения дальности до управляемого машинно-тракторного агрегата вполне подходит для осуществления заявляемого способа, а т. к. принцип работы его в части измерения разницы фаз электромагнитного излучения аналогичен современным радиодальномерам, то и точность его такая же и вполне достаточна для соответствующего уменьшения защитной зоны при культивации. Так, радиодальномер "Теллурометр МРА-4" (ЮАР) имеет среднеквадратическую погрешность , (4) где В - ширина плантации; Н - расстояние между ориентирами в ряду. Поэтому, например, при В = 1000 м и Н = 125 м - max = 0,97 м < 1,0 м, что соизмеримо с отклонениями рядков сахарной свеклы от прямой линии при ручном вождении посевного агрегата и вполне приемлемо по затратам на обустройство плантации ориентирами. Положительный эффект получают за счет точного повторения при междурядной обработке, например, сахарной свеклы, траекторий посевного агрегата при автовождении на посеве и культивациях, что позволяет в несколько раз уменьшить защитную зону и довести обрабатываемую площадь междурядий при культивациях до 80-90%, и, следовательно, повысить урожай свеклы и сбор сахара. Известно устройство для измерения дальности до управляемого машинно-тракторного агрегата вполне подходит для осуществления заявляемого способа, а т. к. принцип работы его в части измерения разницы фаз электромагнитного излучения аналогичен современным радиодальномерам, то и точность его такая же и вполне достаточна для соответствующего уменьшения защитной зоны при культивации. Так, радиодальномер "Теллурометр МРА-4" (ЮАР) имеет среднеквадратическую погрешность  измерения дальности S на длине в 1 км всего 0,6 см ( = 0,3 + 3 измерения дальности S на длине в 1 км всего 0,6 см ( = 0,3 + 3  10-6S = 0,6 см). Максимальная же погрешность определения дальности 3 = 3 0,6 = 1,8 см, при среднеквадратической = 0,6 см, что на порядок точнее визуальной оценки трактористом положения культиваторного агрегата относительно рядков обрабатываемой культуры. На чертеже изображена схема движения сельхозагрегата при автовождении на плантации и размещение ретрансляторов с двух ее сторон. Условные обозначения. 1 - сельхозагрегат в составе трактора и рабочей машины, 2 - приемопередатчик устройства по а.с. N 1279549, 3 - левая антенна с облучателем (Кассегрен) и волноводом к приемопередатчику, 4 - правая антенна с облучателем (Кассегрен) и волноводом к приемопередатчику, 5 - блок логики управления и рулевое устройство системы автовождения типа САУ-1М, 6 - ретранслятор устройства по а.с. N 1279549, 7 - антенна с облучателем и волноводом к ретранслятору, 8 - граница ширины диаграммы направленности антенны ретранслятора, 9 - траектория движения сельхозагрегата на нечетных проходах; стрелкой указано направление движения, 10 - траектория движения сельхозагрегата на четных проходах; стрелкой указано направление движения, 11, 13, 15 ... - нечетные ориентиры в первом ряду, 12, 14, 16 ... - четные ориентиры во втором ряду, В - ширина плантации между первым и вторым рядами ориентиров, Н - расстояние между ориентирами в ряду, R1 - нечетный радиус дуги траектории, R2 - четный радиус дуги траектории, 10-6S = 0,6 см). Максимальная же погрешность определения дальности 3 = 3 0,6 = 1,8 см, при среднеквадратической = 0,6 см, что на порядок точнее визуальной оценки трактористом положения культиваторного агрегата относительно рядков обрабатываемой культуры. На чертеже изображена схема движения сельхозагрегата при автовождении на плантации и размещение ретрансляторов с двух ее сторон. Условные обозначения. 1 - сельхозагрегат в составе трактора и рабочей машины, 2 - приемопередатчик устройства по а.с. N 1279549, 3 - левая антенна с облучателем (Кассегрен) и волноводом к приемопередатчику, 4 - правая антенна с облучателем (Кассегрен) и волноводом к приемопередатчику, 5 - блок логики управления и рулевое устройство системы автовождения типа САУ-1М, 6 - ретранслятор устройства по а.с. N 1279549, 7 - антенна с облучателем и волноводом к ретранслятору, 8 - граница ширины диаграммы направленности антенны ретранслятора, 9 - траектория движения сельхозагрегата на нечетных проходах; стрелкой указано направление движения, 10 - траектория движения сельхозагрегата на четных проходах; стрелкой указано направление движения, 11, 13, 15 ... - нечетные ориентиры в первом ряду, 12, 14, 16 ... - четные ориентиры во втором ряду, В - ширина плантации между первым и вторым рядами ориентиров, Н - расстояние между ориентирами в ряду, R1 - нечетный радиус дуги траектории, R2 - четный радиус дуги траектории,  - ширина диаграммы направленности антенны ретранслятора, 2max - расстояние между крайними точками одной и той же линии траектории в поперечном направлении, - разница фаз, определяемая на выходе приемопередатчика, i - ток на выходе приемопередатчика, зависящий от разницы фаз между принимаемым и излучаемым сигналом. Осуществляют способ, например, следующим образом. Пусть ширина плантации равна В. На сельскохозяйственный агрегат 1 в составе трактора и, например, свекловичной сеялки с междурядьями 45 см устанавливают приемопередатчик 2 устройства определения дальности и две параболические антенны Кассегрен 3 и 4, волноводы которых через тройник Н-типа соединены с приемопередатчиком. Антенны установлены в передней части трактора с двух сторон от его продольной оси, направлены перпендикулярно к ней и в противоположные стороны с возможностью раздвижения, а их волноводы, например, гибкие, неизменной длины. Выход приемопередатчика соединен со входом блока 5 логики управления и рулевым устройством системы автовождения типа САУ-1М кукурузоуборочного комбайна "Херсонец-200". С противоположных сторон плантации по ее бокам размещены ориентиры 11, 13, 15 . .. с одной стороны и 12, 14, 16 ... - с другой. Расстояния между ориентирами равны величине Н. Четные ориентиры смещены относительно нечетных на 0,5Н. Ориентиры выполнены в виде забитых в землю свайных столбиков с гнездами в верхней части для установки параболической антенны 7 и ретранслятора 6, соединенных волноводом. Размещают ориентиры с соблюдением высокоточного равенства расстояний 11-12, 12-13, 13-14, 14-15, 15-16 ..., которое контролируют по электрическим центрам антенны 7, например, отечественным дальномером "Квант", измеряющим расстояние в 1 км с точностью 0,25 мм. Размещают свайные столбики с высокоточным положением гнезд раз и навсегда. Антенны с ретрансляторами устанавливают в гнезда перед выполнением очередной технологической операции. Диаметр d параболической антенны 7 подбирают в соответствии с известной формулой d = - ширина диаграммы направленности антенны ретранслятора, 2max - расстояние между крайними точками одной и той же линии траектории в поперечном направлении, - разница фаз, определяемая на выходе приемопередатчика, i - ток на выходе приемопередатчика, зависящий от разницы фаз между принимаемым и излучаемым сигналом. Осуществляют способ, например, следующим образом. Пусть ширина плантации равна В. На сельскохозяйственный агрегат 1 в составе трактора и, например, свекловичной сеялки с междурядьями 45 см устанавливают приемопередатчик 2 устройства определения дальности и две параболические антенны Кассегрен 3 и 4, волноводы которых через тройник Н-типа соединены с приемопередатчиком. Антенны установлены в передней части трактора с двух сторон от его продольной оси, направлены перпендикулярно к ней и в противоположные стороны с возможностью раздвижения, а их волноводы, например, гибкие, неизменной длины. Выход приемопередатчика соединен со входом блока 5 логики управления и рулевым устройством системы автовождения типа САУ-1М кукурузоуборочного комбайна "Херсонец-200". С противоположных сторон плантации по ее бокам размещены ориентиры 11, 13, 15 . .. с одной стороны и 12, 14, 16 ... - с другой. Расстояния между ориентирами равны величине Н. Четные ориентиры смещены относительно нечетных на 0,5Н. Ориентиры выполнены в виде забитых в землю свайных столбиков с гнездами в верхней части для установки параболической антенны 7 и ретранслятора 6, соединенных волноводом. Размещают ориентиры с соблюдением высокоточного равенства расстояний 11-12, 12-13, 13-14, 14-15, 15-16 ..., которое контролируют по электрическим центрам антенны 7, например, отечественным дальномером "Квант", измеряющим расстояние в 1 км с точностью 0,25 мм. Размещают свайные столбики с высокоточным положением гнезд раз и навсегда. Антенны с ретрансляторами устанавливают в гнезда перед выполнением очередной технологической операции. Диаметр d параболической антенны 7 подбирают в соответствии с известной формулой d =  , (5) где - длина волны несущей частоты передатчика ретранслятора, - необходимая ширина диаграммы направленности антенны, причем = 2 arctg 0,5 , (5) где - длина волны несущей частоты передатчика ретранслятора, - необходимая ширина диаграммы направленности антенны, причем = 2 arctg 0,5  . (6) В таком случае диаграммы направленности антенн 7 четных и нечетных ориентиров будут стыковаться по линиям 8, образующим угол раствора диаграммы направленности. Пpиемопередатчиком 2 и ретранслятором 6 устройства определяют дальность до ориентира (электрического центра антенны 7 ретранслятора 6) как периодическую функцию с длиной полупериода равным ширине захвата рабочей машины сельхозагрегата 1 (и, следовательно, расстоянию между смежными проходами сельхозагрегата) соответствующую периодической разнице фаз принимаемой ретранслированной и излучаемой масштабной частоты, модулирующей несущие, и определяемую по соответствующему току i на выходе приемопередатчика 2, что отображено на эпюре выходного тока i, наложенной на линию 8 фиг. в координатах i 0 В основу способа автовождения сельхозагрегата 1 положено использование функции по выходному току i приемопередатчика 2, как сигнала рассогласования пропорционального отклонению антенны 3 (4) от антенны 7 ретранслятора 6 нечетного (четного) ориентира, который подают на вход системы автовождения 5, например, типа САУ-1М. Тем самым автоматически направляют сельхозагрегат по изодальней от ориентиров траекторной линии, например, 10 в виде сопряженных внешними сопряжениями дуг окружностей с радиусами R1 и R2, центры которых совпадают с ориентирами на противоположных сторонах плантации поочередно по ходу движения сельхозагрегата 1. В начале сезона проводят настройку системы автовождения. Для этого перед первой технологической операцией в новом сезоне по возделыванию сахарной свеклы, например, перед ранневесенней культивацией, сельхозагрегат 1 устанавливают в начале первого гона так, чтобы антенны 3 и 4 оказались примерно на линии 8 и были направлены в сторону ретрансляторов на ее концах. Антенну 4 отклоняют вверх, чтобы ее луч пришел заведомо выше четных ретрансляторов. Включают приемопередатчик 2 и ручкой фазовращателя 11 устанавливают нулевое значение тока i, контролируя его по стрелочному индикатору 13 (там же). Тем самым, смещают эпюру тока i относительно сельхозагрегата 1 вдоль линии 8 в положение, изображенное на чертеже в координатах iO , при котором нулевое значение тока i совпадает с линией траектории, проходящей через продольную ось исходного положения сельхозагрегата. Затем антенну 4 возвращают в горизонтальное положение, а антенну 3 отклоняют вверх, чтобы ее луч прошел заведомо выше нечетных ретрансляторов. Перемещением антенны 4 перпендикулярно продольной оси сельхозагрегата 1 снова устанавливают нулевое значение тока i, контролируемое также по стрелочному индикатору, следя за тем, чтобы стрелка подошла к нулю с той же стороны, что и в первом случае. Этим эпюру i при ретрансляции сигнала от четных ориентиров совмещают с эпюрой i от нечетных ориентиров. Для уменьшения величины необходимого перемещения антенны 4 при совмещении эпюр i длину периода дальности устанавливают в несколько раз меньшей, чем описано выше, для чего длину волны масштабной частоты определяют по формуле: = . (6) В таком случае диаграммы направленности антенн 7 четных и нечетных ориентиров будут стыковаться по линиям 8, образующим угол раствора диаграммы направленности. Пpиемопередатчиком 2 и ретранслятором 6 устройства определяют дальность до ориентира (электрического центра антенны 7 ретранслятора 6) как периодическую функцию с длиной полупериода равным ширине захвата рабочей машины сельхозагрегата 1 (и, следовательно, расстоянию между смежными проходами сельхозагрегата) соответствующую периодической разнице фаз принимаемой ретранслированной и излучаемой масштабной частоты, модулирующей несущие, и определяемую по соответствующему току i на выходе приемопередатчика 2, что отображено на эпюре выходного тока i, наложенной на линию 8 фиг. в координатах i 0 В основу способа автовождения сельхозагрегата 1 положено использование функции по выходному току i приемопередатчика 2, как сигнала рассогласования пропорционального отклонению антенны 3 (4) от антенны 7 ретранслятора 6 нечетного (четного) ориентира, который подают на вход системы автовождения 5, например, типа САУ-1М. Тем самым автоматически направляют сельхозагрегат по изодальней от ориентиров траекторной линии, например, 10 в виде сопряженных внешними сопряжениями дуг окружностей с радиусами R1 и R2, центры которых совпадают с ориентирами на противоположных сторонах плантации поочередно по ходу движения сельхозагрегата 1. В начале сезона проводят настройку системы автовождения. Для этого перед первой технологической операцией в новом сезоне по возделыванию сахарной свеклы, например, перед ранневесенней культивацией, сельхозагрегат 1 устанавливают в начале первого гона так, чтобы антенны 3 и 4 оказались примерно на линии 8 и были направлены в сторону ретрансляторов на ее концах. Антенну 4 отклоняют вверх, чтобы ее луч пришел заведомо выше четных ретрансляторов. Включают приемопередатчик 2 и ручкой фазовращателя 11 устанавливают нулевое значение тока i, контролируя его по стрелочному индикатору 13 (там же). Тем самым, смещают эпюру тока i относительно сельхозагрегата 1 вдоль линии 8 в положение, изображенное на чертеже в координатах iO , при котором нулевое значение тока i совпадает с линией траектории, проходящей через продольную ось исходного положения сельхозагрегата. Затем антенну 4 возвращают в горизонтальное положение, а антенну 3 отклоняют вверх, чтобы ее луч прошел заведомо выше нечетных ретрансляторов. Перемещением антенны 4 перпендикулярно продольной оси сельхозагрегата 1 снова устанавливают нулевое значение тока i, контролируемое также по стрелочному индикатору, следя за тем, чтобы стрелка подошла к нулю с той же стороны, что и в первом случае. Этим эпюру i при ретрансляции сигнала от четных ориентиров совмещают с эпюрой i от нечетных ориентиров. Для уменьшения величины необходимого перемещения антенны 4 при совмещении эпюр i длину периода дальности устанавливают в несколько раз меньшей, чем описано выше, для чего длину волны масштабной частоты определяют по формуле: =  , (7) где b - ширина захвата рабочей машины; n - 0, 1, 2, 3 ... - целое число. Так, для 12-ти рядного комплекса серийных свекловичных сеялок и культиваторов с шириной захвата b = 5,4 м n принимают, например 4. Тогда = 240 см, а соответствующая ей масштабная частота модуляции f = 125000000 Гц (т. е. 125 МГц ровно), которую получают при помощи соответствующего кварцевого генератора 5. Этим эпюру i сжимают по оси до длины одного периода дальности равного 0,5 = 120 см. Поэтому антенну 4 при совмещении эпюр i достаточно перемещать не более, чем на 60 см, т.е. (максимум) на пол периода дальности. В другом варианте n принимают, например, 13. Тогда = 80 см, f= 375000000 Гц (т.е. 375 МГц ровно), период дальности равен 40 см, а антенну 4 при настройке перемещают не более, чем на 20 см, что вполне приемлемо конструктивно. При n = 0 получают исходный вариант, изображенный на чертеже эпюрой i в кооpдинатах i0. Однако он менее констpуктивен, так как для совмещения эпюр i при настройке необходимое перемещение антенны 4 может достигать величины b = 5,4 м, если совмещение эпюр не выполнить другим образом. Соблюдение соотношений по формуле 7 необходимо для того, чтобы с каждой стороны (правой, левой) траекторных линий 9 и 10 по ходу движения сельхозагрегата 1 неизменно располагалась эпюра тока i своего знака , (7) где b - ширина захвата рабочей машины; n - 0, 1, 2, 3 ... - целое число. Так, для 12-ти рядного комплекса серийных свекловичных сеялок и культиваторов с шириной захвата b = 5,4 м n принимают, например 4. Тогда = 240 см, а соответствующая ей масштабная частота модуляции f = 125000000 Гц (т. е. 125 МГц ровно), которую получают при помощи соответствующего кварцевого генератора 5. Этим эпюру i сжимают по оси до длины одного периода дальности равного 0,5 = 120 см. Поэтому антенну 4 при совмещении эпюр i достаточно перемещать не более, чем на 60 см, т.е. (максимум) на пол периода дальности. В другом варианте n принимают, например, 13. Тогда = 80 см, f= 375000000 Гц (т.е. 375 МГц ровно), период дальности равен 40 см, а антенну 4 при настройке перемещают не более, чем на 20 см, что вполне приемлемо конструктивно. При n = 0 получают исходный вариант, изображенный на чертеже эпюрой i в кооpдинатах i0. Однако он менее констpуктивен, так как для совмещения эпюр i при настройке необходимое перемещение антенны 4 может достигать величины b = 5,4 м, если совмещение эпюр не выполнить другим образом. Соблюдение соотношений по формуле 7 необходимо для того, чтобы с каждой стороны (правой, левой) траекторных линий 9 и 10 по ходу движения сельхозагрегата 1 неизменно располагалась эпюра тока i своего знака  или или  . В таком случае при отклонении сельхозагрегата, например, вправо, (влево) по ходу от любой траекторной линии на выходе приемопередатчика 2 направление тока i всегда одно и то же - ( ), а при отклонении влево (вправо) - всегда противоположное (). После настройки включают ход сельхозагрегата. При небольшом отклонении сельхозагрегата, например, вправо (влево) с выхода приемопередатчика 2 на вход блока 5 логики управления и рулевого устройства идет ток i прямого (обратного ) направления почти пропорционально величине этого отклонения. Срабатывает блок 5 логики управления и рулевого устройства, которым автоматически поворачивают управляемые колеса трактора влево (вправо) пропорционально отклонению и, тем самым, направляют сельхозагрегат вдоль траекторной линии. При этом сельхозагрегат проходит через секторы направленного приема и излучения антенн 7 ретрансляторов 6 поочередно нечетных и четных ориентиров по ходу своего движения, связь с которыми осуществляют поочередно то через правую 4, то через левую 3 антенны имеющими игольчатую диаграмму направленности шириной не менее флуктуации курса сельхозагрегата при автовождении, т.е. имеющими ширину диаграммы направленности в пределах 2-4о. На концах гонов сельхозагрегат разворачивают и заводят в загонку для нового прохода с помощью ручного управления визуально с погрешностью не более половины периода дальности. Например, в варианте n = 13 - до 20 см, а далее сельхозагрегат ведут автоматически. При проведении последующих технологических операций, включая посев и довсходовые обработки вдоль рядков, способ автовождения сельхозагрегата осуществляют описанным выше способом, но настройку системы автовождения повторять не требуется. При появлении всходов способ осуществляют так же, как и ранее, но заезд в рядки после поворотов облегчается, так как они видны. Положительный эффект получают за счет точного повторения при междурядной обработке, например, сахарной свеклы, траекторий посевного агрегата, что позволяет увеличить обрабатываемую площадь междурядий до 80-90% с соответствующим уменьшением сорняков и повышением урожая в среднем на 79-96 ц/га, произвести дополнительно примерно тонну сахара с гектара свекловичной плантации. . В таком случае при отклонении сельхозагрегата, например, вправо, (влево) по ходу от любой траекторной линии на выходе приемопередатчика 2 направление тока i всегда одно и то же - ( ), а при отклонении влево (вправо) - всегда противоположное (). После настройки включают ход сельхозагрегата. При небольшом отклонении сельхозагрегата, например, вправо (влево) с выхода приемопередатчика 2 на вход блока 5 логики управления и рулевого устройства идет ток i прямого (обратного ) направления почти пропорционально величине этого отклонения. Срабатывает блок 5 логики управления и рулевого устройства, которым автоматически поворачивают управляемые колеса трактора влево (вправо) пропорционально отклонению и, тем самым, направляют сельхозагрегат вдоль траекторной линии. При этом сельхозагрегат проходит через секторы направленного приема и излучения антенн 7 ретрансляторов 6 поочередно нечетных и четных ориентиров по ходу своего движения, связь с которыми осуществляют поочередно то через правую 4, то через левую 3 антенны имеющими игольчатую диаграмму направленности шириной не менее флуктуации курса сельхозагрегата при автовождении, т.е. имеющими ширину диаграммы направленности в пределах 2-4о. На концах гонов сельхозагрегат разворачивают и заводят в загонку для нового прохода с помощью ручного управления визуально с погрешностью не более половины периода дальности. Например, в варианте n = 13 - до 20 см, а далее сельхозагрегат ведут автоматически. При проведении последующих технологических операций, включая посев и довсходовые обработки вдоль рядков, способ автовождения сельхозагрегата осуществляют описанным выше способом, но настройку системы автовождения повторять не требуется. При появлении всходов способ осуществляют так же, как и ранее, но заезд в рядки после поворотов облегчается, так как они видны. Положительный эффект получают за счет точного повторения при междурядной обработке, например, сахарной свеклы, траекторий посевного агрегата, что позволяет увеличить обрабатываемую площадь междурядий до 80-90% с соответствующим уменьшением сорняков и повышением урожая в среднем на 79-96 ц/га, произвести дополнительно примерно тонну сахара с гектара свекловичной плантации.
Формула изобретения1. СПОСОБ АВТОВОЖДЕНИЯ СЕЛЬХОЗАГРЕГАТА, включающий размещение ориентиров вне обрабатываемой плантации, излучение зафиксированного по фазе сигнала, причем переизлученного ориентиром сигнала и измерение его фазы, определение текущих координат движущегося сельхозагрегата по разности фаз прямого и переизлученного сигналов и корректирование курса сельхозагрегата, отличающийся тем, что, с целью повышения точности автовождения по эквидистантным квазипрямым траекториям, размещают отдельно четные и отдельно нечетные ориентиры соответственно вдоль каждой из боковых сторон обрабатываемой плантации одинарными рядами с продольным смещением ориентиров одного ряда относительно другого ряда на половину интервала между ориентирами и направляют сельхозагрегат по траекториям, соответствующим эквидистантным квазипрямым линиям, соединяющим внешними сопряжениями дуги окружностей, центры которых расположены в месте размещения ориентиров, установленных напротив друг друга на противоположных сторонах плантации поочередно по ходу движения сельхозагрегата. 2. Способ по п.1, отличающийся тем, что переизлучение сигнала осуществляют от ориентиров, расположенных на противоположных сторонах плантации последовательно по ходу движения сельхозагрегата, при этом чередуют четные и нечетные ориентиры.MM4A Досрочное прекращение действия патента Российской Федерации на изобретение из-за неуплаты в установленный срок пошлины за поддержание патента в силе Номер и год публикации бюллетеня: 27-2000 Извещение опубликовано: 27.09.2000 Популярные патенты: 2007081 Способ биологической борьбы с вредителями капусты ... - капустной совки, капустной белянки и капустной моли. В этом источнике однако дается только общая характеристика применяемых нектароносов ("семенники зонтичных, крестоцветных, лука и других нектароносов"), что не позволяет осуществить способ на практике без указания на конкретные виды нектароносных растений. Кроме того, на крестоцветных растениях питаются и вредители, что в несколько раз повышает их плодовитость, а значит и численность, и вредоносность в последующем. Наиболее близким техническим решением к предложенному способу являются работы, проведенные ранее и описанные в источнике [1] . Здесь даются конкретные рекомендации по применению различных видов нектароносных растений ... 2452165 Высевающий аппарат зерновой сеялки с централизованным дозированием семян ... дозирующего устройства, включающего установленные на приводном валу 5 две пары цилиндров 6 и 7. Основания внешних цилиндров 8 пар цилиндров 6 и 7 надеты на концевые части приемных камер 1 и 2. Внутренние цилиндры 9 пар цилиндров 6 и 7 закреплены на приводном валу 5. Между внешними 8 и внутренними 9 цилиндрами пар 6 и 7 равномерно по окружности размещены по винтовой линии многозаходные плоские витки 10, при этом в паре цилиндров 6 витки с левосторонней навивкой, а в паре цилиндров 7 - с правосторонней (фиг.2). Количество заходов плоских витков 10 зависит от требуемой производительности высевающего аппарата. Приводной вал 5 опирается на подшипниковый узел 11, на котором расположена ... 2083070 Способ предпосевной обработки семян и устройство для его осуществления ... управления открывает ключевой блок и происходит разряд конденсаторного накопителя на соленоид, что создает импульс магнитного поля в излучателе. 2 с. п. ф-лы. 2 ил., 3 табл. , , ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУ Изобретение относится к сельскому хозяйству, а именно к предпосевной обработке семян сельскохозяйственных культур, и может быть использовано для обработки семян в магнитном поле. Известен способ предпосевной обработки семян в магнитном поле 1,5 5 Э, частотой 2 20 кГц, при длительности обработки 5 10 мин. Устройство для реализации этого способа представляет собой излучатель магнитного поля, выполненный в виде катушки индуктивности, входящей в колебательный ... 2241322 Навесное устройство трактора ... из поворотного вала с закрепленными на нем рычагами, связанными раскосами с нижними продольными тягами, которые снабжены упругим подвесом с жестко закрепленным на основе трактора корпусом, а поворотный вал механизма подъема выполнен в виде торсиона (SU, авторское свидетельство №677698, М.Кл. 2 А 01 В 59/04. Навесное устройство трактора / С.Ф.Орлов, В.А.Александров и А.Ф.Харитонов (СССР). - Заявлено 12.12.1977, Заявка №554315/ 30-15; Опубл. 05.08.1978, Бюл.№29).Недостатком представленного устройства является отсутствие возможности регулирования направления силы тяги и условий копирования орудием микрорельефа поверхности поля.Известно сцепное устройство для присоединения ... 2250583 Агрегат дернинный комбинированный ... дисков, формирующих вертикальные стенки полосы и расположенных по ширине друг от друга на расстоянии, равном ширине обрабатываемой полосы фрезерных рабочих органов дернинной сеялки, и смещенных относительно друг друга в направлении движения агрегата на расстояние не менее радиуса диска, а перед подпружиненными секциями рабочих органов по середине полосы установлены щелерезы-камнеудалители.2. Агрегат дернинный комбинированный по п.1, отличающийся тем, что на щелерезах-камнеудалителях закреплены туконаправители с возможностью осевых перемещений. MM4A - Досрочное прекращение действия патента СССР или патента Российской Федерации на изобретение из-за неуплаты в установленный срок ... |
Еще из этого раздела: 2215407 Способ создания исходного материала для селекции растений 2464780 Способ, устройство и компьютерный программный продукт для управления группой молочного скота 2197817 Поплавок для рыболовных удочек и снастей 2420060 Способ генетической трансформации растений селекционно-ценных образцов клевера лугового 2245013 Устройство для обмолота легкоповрежденных культур на примере нута (варианты) 2084104 Ручная сеялка для разбросного посева семян травосмесей 2245614 Устройство для очистки вороха в зерноуборочном комбайне 2296457 Устройство для магнитно-импульсной обработки растений 2102853 Питательное устройство для растений 2062564 Способ оценки устойчивости растений к засухе северного и южного типа на ранних этапах онтогенеза |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||