Электрогидравлическая система управления навесными орудиямиПатент на изобретение №: 2021653 Автор: Строк Евгений Яковлевич[BY], Бельчик Леонид Демьянович[BY] Патентообладатель: Институт надежности машин АН Беларуси (BY) Дата публикации: 30 Октября, 1994 Изображения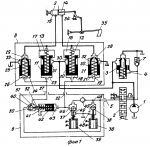 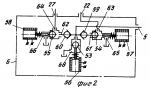 Использование: в сельскохозяйственном машиностроении. Сущность изобретения: при подъеме и принудительном опускании навесного орудия применяются уравновешенные двухпозиционные однолинейные клапаны совместно с управляемыми обратными клапанами. Это позволяет обеспечить нулевое перекрытие в гидрорасределителе силового гидроцилиндра уменьшить запаздывание в системе. 2 з.п. ф-лы, 2 ил. Изобретение относится к сельскохозяйственному и дорожностроительному машиностроению, в частности к гидронавесным устройствам мобильных машин, и может быть использовано для управления навесными рабочими органами этих машин. Известна электрогидравлическая система трактора, позволяющая управлять основным и дополнительным гидроцилиндрами с помощью сервозолотника, гидрораспределителя и двух электромагнитных золотников. Недостаток системы - запаздывание при ее работе из-за наличия положительного перекрытия у гидроэлеметов, распределяющих поток рабочей жидкости от насоса к гидроцилиндрам. Из известных систем управления наиболее близкой к предлагаемой по технической сущности является электрогидравлическая система управления навесными орудиями, которая содержит гидравлически соединенные насос, распределитель выносного гидроцилиндра, перепускной и выпускной клапаны, электромагнитные серводатчики, управляемые двухпозиционные двух- и четырехлинейный гидрораспределители, силовой гидроцилиндр. Система позволяет реализовать такие функции управления силовым гидроцилиндром, как фиксирование в заданном положении, подъем, опускание навесного орудия под собственным весом и под давлением рабочей жидкости от насоса. Из условия обеспечения приоритета управления выносным гидроцилиндром по отношению к силовому золотник двухлинейного гидрораспределителя имеет соответствующее положительное перекрытие. Недостаток системы - запаздывание при подъеме и принудительном опускании навесного орудия из-за положительного перекрытия. Цель изобретения - уменьшение запаздывания срабатывания путем реализации нулевого перекрытия в гидрораспределителе силового гидроцилиндра. Поставленная цель достигается тем, что в электрогидравлической системе управления навесными орудиями, содержащей насос, силовой гидроцилиндр, гидравлически связанные посредством перепускного и выпускного клапанов со сливом, гидрораспределитель выносного гидроцилиндра, гидрораспределитель силового гидроцилиндра, установленный в напорной линии насоса параллельно гидрораспределителю выносного гидроцилиндра, блок сервоуправления, первый вход которого связан с заклапанной полостью перепускного клапана посредством гидрораспределителя выносного гидроцилиндра, а второй вход - с управляющей полостью упомянутого выпускного клапана, гидрораспределитель силового гидроцилиндра выполнен в виде пары уравновешенных двухпозиционных однолинейных впускных клапанов, установленных параллельно между насосом и полостями подъема и опускания силового гидроцилиндра. Последняя полость связана со сливом через дополнительно введенный выпускной клапан, управляющая полость которого соединена с управляющей полостью впускного клапана со стороны полости опускания силового гидроцилиндра и с третьим входом блока сервоуправления. Сопоставительный анализ с прототипом показывает, что заявляемая электрогидравлическая система управления навесными орудиями отличается тем, что гидрораспределитель силового гидроцилиндра выполнен в виде пары уравновешенных двухпозиционных однолинейных впускных клапанов, установленных параллельно между насосом и полостями подъема и опускания силового гидроцилиндра. Это позволяет уменьшить запаздывание срабатывания гидрораспределителя при подъеме и принудительном опускании навесного орудия за счет уменьшения перекрытий. Впускные клапаны обеспечивают надежное разобщение полостей силового гидроцилиндра при фиксировании навесного орудия в заданном положении с разгруженной по давлению напорной линией насоса. Полость опускания гидроцилиндра связана со сливом через дополнительно введенный выпускной клапан, управляющая полость которого соединена с управляющей полостью впускного клапана со стороны полости опускания силового гидроцилиндра и с третьим входом блока сервоуправления. За счет этого осуществляется надежное фиксирование навесного орудия в заданном положении и выпуск рабочей жидкости из полости опускания силового гидроцилиндра при подъеме навесного орудия. Таким образом, заявляемая электрогидравлическая система управления навесными орудиями соответствует критерию изобретения "новизна". Сравнение заявляемого решения с другими техническими решениями показывает, что уравновешенные двухпозиционные однолинейные впускные и выполненные в виде управляемых обратных клапанов выпускные клапаны известны. Однако при введении таких клапанов в указанной связи с остальными элементами схемы в заявляемую систему управления для обеспечения нулевого перекрытия в гидрораспределителе силового гидроцилиндра система проявляет новые свойства, что приводит к уменьшению запаздывания ее срабатывания при подъеме и принудительном опускании навесного орудия. Это позволяет сделать вывод о соответствии технического решения критерию "существенные отличия". На фиг.1 изображена электрогидравлическая система управления навесными орудиями, обеспечивающая их подвижность при фиксировании в заданном положении в сторону подъема. Электрогидравлическая система содержит насос 1, гидрораспределитель 2 для управления выносным гидроцилиндром (не показан), перепускной клапан 3, заклапанная полость 4 которого связана через гидрораспределитель 2 с первым входом 5 блока 6 сервоуправления, предохранительный клапан 7, установленный между заклапанной полостью 4 перепускного клапана 3 и сливом, гидрораспределитель 8 силового гидроцилиндра 9 с уравновешенными двухпозиционными однолинейными впускными клапанами 10 и 11, подпружиненными пружинами 12 и 13 и установленными соответственно со стороны полостей подъема 14 и опускания 15 силового гидроцилиндра 9. Полости соединены с соответствующими заклапанными полостями 16 и 17 этих впускных клапанов. Управляющая полость 18 впускного клапана 10 соединена с управляющей полостью 19 выпускного клапана 20, подпружиненного пружиной 21, и со вторым входом 22 блока 6 сервоуправления, а управляющая полость 23 впускного клапана 11 - с управляющей полостью 24 выпускного клапана 25, подпружиненного пружиной 26, и с третьим входом 27 блока сервоуправления. Доклапанные полости 28 и 29 выпускных клапанов 20 и 25 соединены соответственно с полостями подъема 14 и опускания 15 силового гидроцилиндра 9 и посредством дроссельных отверстий, выполненных в клапанах, - с их управляющими полостями 19 и 24. Доклапанные полости 30 и 31 впускных клапанов 10 и 11 соединены между собой и с насосом 1, а заклапанные полости 32 и 33 выпускных клапанов 20 и 25 - со сливом. Шток 34 силового гидроцилиндра 9 кинематически связан с навесным орудием 35. Блок 6 сервоуправления содержит односедельный 36 и двухседельный 37 датчики сервоуправления, кинематически связанные соответственно с электромагнитами 38 и 39, клапан ИЛИ 40, кинематически связанный с подпружиненным пружиной 41 плунжером 42, управляющая полость 43 которого соединена с межседельной полостью 44 двухседельного датчика 37 сервоуправления и со вторым входом 22 блока 6 сервоуправления, обратный клапан 45, посредством которого доклапанная полость 46 односедельного датчика 36 сервоуправления связана с одноименной полостью 47 двухседельного датчика 37 сервоуправления. Заклапанные полости 48 и 49 датчиков сервоуправления соединен со сливом. Доклапанные полости 46 и 50 односедельного датчика 36 сервоуправления и клапана ИЛИ 40 соединены с первым входом 5 блока 6 сервоуправления, а межседельная 51 и заклапанная 52 полости клапана ИЛИ соединены соответственно с третьим входом 27 блока 6 сервоуправления и со сливом. Электромагниты 38 и 39 подключны к источнику питания (не показан) с возможностью одновременного включения. На фиг.2 изображена электрогидравлическая система управления навесными орудиями, исключающая их подвижность при фиксировании в заданном положении как в сторону подъема, так и в сторону опускания, фрагмент. Указанная электрогидравлическая система в отличие от системы, обеспечивающей подвижность навесного орудия в сторону подъема (фиг.1), включает в себя блок 6 сервоуправления, который содержит односедельный 53 и пару двухседельных 54 и 55 датчиков сервоуправления, кинематически связанных соответственно с электромагнитами 56, 57 и 58, а также обратные клапаны 59 и 60, посредством которых первый вход 5 блока 6 сервоуправления связан соответственно с доклапанными полостями 61 и 62 двухседельных датчиков 54 и 55 сервоуправления. Межседельные полости 63 и 64 этих датчиков соединены соответственно со вторым 22 и третьим 27 входами упомянутого блока сервоуправления, а их заклапанные полости 65 и 66 - со сливом. Первый вход 5 соединен с доклапанной полостью 67 односедельного датчика 53 сервоуправления, заклапанная полость 68 которого соединена со сливом. Электромагниты 56, 57 и 58 подключены к источнику питания (не показан) с возможностью одновременного включения. Электрогидравлическая система управления навесными орудиями, обеспечивающая их подвижность при фиксировании в заданном положении в сторону подъема (фиг.1), работает следующим образом. Для управления навесным орудием 35, кинематически связанным с силовым гидроцилиндром 9, распределитель 2 установлен в нейтральное положение. Установка распределителя 2 в любое другое положение обеспечивает управление выносным гидроцилиндром (не показан). Фиксирование навесного орудия 35 в заданном положении от самоопускания осуществляется при одновременном обесточивании электромагнитов 38 и 39. При обесточенном электромагните 38 датчик 36 сервоуправления соединяет доклапанную полость 46, первый вход 5 блока 6 сервоуправления и заклапанную полость 4 перепускного клапана 3 со сливом, что обеспечивает его открытие и сообщение со сливом насоса 1. Полость 14 подъема силового гидроцилиндра 9, заклапанная 16 и доклапанная 28 полости впускного 10 и выпускного 20 клапанов, а посредством дроссельного отверстия последнего и управляющие полости 18 и 19 этих клапанов, а также благодаря второму входу 22 блока 6 сервоуправления межседелльная 44 и управляющая 43 полости датчика 37 сервоуправления и плунжера 42 находятся под давлением рабочей жидкости, создаваемым весом навесного орудия 35. Под действием указанного давления при обесточенном электромагните 39 датчик 37 сервоуправления смещен в сторону заклапанной полости 49, а плунжер 42 смещен в сторону пружины 41. Межседельная 44 и доклапанная 47 полости датчика 37 сервоуправления соединены между собой, и обратный клапан 45 закрыт. Клапан ИЛИ 40 благодаря кинематической связи с плунжером 42 смещен в сторону доклапанной полости 50, соединяя третий вход 27 блока 6 сервоуправления, управляющие полости 23 и 24 впускного 11 и выпускного 25 клапанов, а также через дроссельное отверстие последнего заклапанную полость 17 и полость 15 опускания впускного клапана 11 и силового гидроцилиндра 9 со сливом. Вследствие этого впускной клапан смещен под действием пружины 13 в сторону управляющей полости 23 и отсоединяет доклапанную полость 31 и насос 1 от заклапанной полости 17 и полости 15 опускания. Выпускной клапан 25 под действием давления рабочей жидкости от веса навесного орудия 35 и пружины 26 смещен в сторону доклапанной полости 29, отсоединяя ее и полость 15 опускания от заклапанной полости 33 и слива. Впускной клапан 10 смещен под действием пружины 12 в сторону управляющей полости 18, отсоединяя доклапанную полость 30 и насос 1 от заклапанной полости 16 и полости 14 подъема, а выпускной клапан 20 смещен под действием давления рабочей жидкости, создаваемого весом навесного орудия 35 в сторону доклапанной полости 28, отсоединяя ее и полость 14 подъема от заклапанной полости 32 и слива. Так осуществляется фиксирование в заданном положении от самоопукания навесного орудия 35, которое при этом сохраняет подвижность в сторону подъема. В этом случае при перемещении навесного орудия 35 вверх кинематически связанный с ним поршень 34 силового гидроцилиндра 9 перемещается в сторону полости 15 опускания, и в этой полости создается давление рабочей жидкости. Под действием перепада давлений, возникающего на дроссельном отверстии, выпускной клапан 25, сжимая пружину 26, перемещается в сторону управляющей полости 24, соединяя доклапанную полость 29 и полость 15 опускания с заклапанной полостью 33 и сливом. Рабочая жидкость вытесняется из полости опускания на слив. В то же время поршень 34 втягивает за собой рабочую жидкость из заклапанной 16 и доклапанной 28 полостей впускного 10 и выпускного 20 клапанов, из управляющих полостей 18 и 19 этих клапанов, из управляющей полости 43 плунжера 42, а также из межседельной 44 и доклапанной 47 полостей датчика 37 сервоуправления. Обратный клапан 45 открывается и связывает указанные полости через первый вход 5, гидрораспределитель 2 и перепускной клапан 3 со сливом. Под действием перепада давлений, возникающего на дроссельном отверстии выпускного клапана 20, впускной клапан 10 перемещается в сторону заклапанной полости 16, сжимая пружину 12. Указанная полость и полость 14 подъема соединяются с доклапанной полостью 30 и насосом 1, который связан посредством перепускного клапана 3 со сливом, и рабочая жидкость поступает в полость 14 подъема. Выпускной клапан 20 в это время под действием упомянутого перепада давлений и пружины 21 смещен в сторону доклапанной полости 28 и отсоединяет ее и полость 14 подъема от заклапанной полости 32 и от слива. Для осуществления подъема навесного орудия 35 возбуждается электромагнит 38. Датчик 36 сервоуправления перемещается в сторону доклапанной полости 46 и отсоединяет ее, а также первый вход 5 блока 6 сервоуправления и заклапанную полость 4 перепускного клапана 3 от слива. Это вызывает закрытие перепускного клапана 3 и отсоединение насоса 1 от слива. Поток рабочей жидкости от насоса 1 через заклапанную полость 4 и гидрораспределитель 2 поступает к первому входу 5 и к доклапанной полости 50 клапана ИЛИ 40, а также через обратный клапан 45 - к доклапанной полости 47 датчика 37 сервоуправления. В случае отсутствия весового воздействия со стороны навесного орудия 35 упомянутый датчик перемещается под действием давления рабочей жидкости из заклапанной полости 4 в сторону заклапанной полости 49, отсоединяя межседельную полость 44 от слива и соединяя ее с доклапанной полостью 47. При весовом воздействии со стороны навесного орудия 35 датчик 37 сервоуправления смещен в сторону заклапанной полости 49 под действием давления рабочей жидкости, создаваемого весом этого навесного орудия. Поток рабочей жидкости из заклапанной полости 4 через межседельную полость 44 поступает в управляющую полость 43 плунжера 42 и через второй вход 22 - в управляющие полости 18 и 19 впускного 10 и выпускного 20 клапанов, а также через дроссельное отверстие последнего - в заклапанную 16, в доклапанную 28 полости этих клапанов и в полость 14 подъема. Под действием перепада давлений, возникающего на дроссельном отверстии выпускного клапана 20, впускной клапан 10 перемещается, сжимая пружину 12, в сторону заклапанной полости 16, соединяя ее полость 14 подъема с доклапанной полостью 30 и насосом 1. Выпускной клапан 20 при этом смещен перепадом давлений и пружиной 21 в сторону доклапанной полости 28 и отсоединяет ее и полость 14 подъема от слива. Давление рабочей жидкости из заклапанной полости 4 благодаря выбранному соотношению активных площадей плунжера 42 и доклапанной полости 50 клапана ИЛИ 40 перемещает упомянутый плунжер в сторону пружины 41, сжимая ее. Клапан ИЛИ 40 при этом перемещается в сторону доклапанной полости 50, отсоединяя ее от межседельной полости 51, которая соединяется с заклапанной полостью 52 и сливом. Посредством третьего входа 27 со сливом также связываются управляющие полости 23 и 24 впускного 11 и выпускного 25 клапанов, через дроссельное отверстие последнего - заклапанная 17 и доклапанная 29 полости этих клапанов, а также полость 15 опускания. В то же время поток рабочей жидкости от насоса 1 поступает в полость 14 подъема, и поршень 34 перемещается в сторону полости 15 опускания, вытесняя из нее рабочую жидкость, которая подводится к заклапанной 17 и доклапанной 29 полостям впускного 11 и выпускного 25 клапанов. Под действием перепада давлений, возникающего на дроссельном отверстии, выпускной клапан 25, сжимая пружину 26, перемещается в сторону управляющей полости 24, соединяя доклапанную полость 29 и полость 15 опускания с заклапанной полостью 33 и сливом. Рабочая жидкость из полости 15 опускания отводится на слив, и происходит подъем навесного орудия 35. Впускной клапан 11 под действием перепада давлений и пружины 13 смещен в сторону управляющей полости 23 и отсоединяет заклапанную полость 17 и полость 15 опускания от доклапанной полости 31 и насоса 1. Опускание навесного орудия 35 под действием собственного веса осуществляется при возбуждении электромагнита 39, который перемещает датчик 37 сервоуправления в сторону доклапаннй полости 47. Межседельная 44 и управляющая 43 полости упомянутого датчика сервоуправления и плунжера 42, второй вход 22 блока 6 сервоуправления, управляющие полости 18 и 19 впускного 10 и выпускного 20 клапанов, а через дроссельное отверстие последнего заклапанная 16 и доклапанная 28 полости этих клапанов, а также полость 14 подъема соединяются с заклапанной полостью датчика 37 сервоуправления и со сливом. Под действием веса навесного орудия рабочая жидкость вытесняется из полости 14 подъема. На дроссельном отверстии выпускного клапана 20 создается перепад давлений, и клапан перемещается, сжимая пружину 21, в сторону управляющей полости 19. Вследствие этого, доклапанная полость 28 и полость 14 подъема сообщаются с заклапанной полостью 32 и сливом. Рабочая жидкость из полости 14 подъема отводится на слив, и происходит опускание навесного орудия 35 под действием собственного веса. Впускной клапан 10 под действием упомянутого перепада давлений и пружины 12 смещен в это время в сторону управляющей полости 18 и отсоединяет заклапанную полость 16 и полость 14 подъема от доклапанной полости 30 и насоса 1, который при обесточенном электромагните 38 посредством перепускного клапана 3 связан со сливом. Посредством датчика 36 сервоуправления со сливом также связаны первый вход 5 и доклапанная полость 50 клапана ИЛИ 40. Поэтому под действием пружины 41 плунжер 42 смещен в сторону управляющей полости 43. Поршень 34 при своем движении в сторону полости 14 подъема втягивает за собой рабочую жидкость из клапанной 17 и доклапанной 29 полостей впускного 11 и выпускного 25 клапанов, из управляющих полостей 23 и 24 этих клапанов и через третий вход 27 из межседельной полости 51, которая соединена с доклапанной полостью 50 и сливом. Под действием перепада давлений, возникающего на дроссельном отверстии выпускного клапана 25, впускной клапан 11 перемещается в сторону заклапанной полости 17, сжимая пружину 13. Указанная полость и полость 15 опускания соединяются с доклапанной полостью 31 и сливом. Благодаря этому рабочая жидкость поступает в полость 15 опускания. Принудительное опускание навесного орудия 35 под действием давления рабочей жидкости, создаваемого насосом 1, происходит при одновременном возбуждении электромагнитов 38 и 39. Датчик 36 сервоуправления перемещается в сторону доклапанной полости 46 и отсоединяет ее, а также первый вход 5 блока 6 сервоуправления и заклапанную полость 4 перепускного клапана 3 от слива. Это вызывает закрытие перепускного клапана 3 и отсоединение насоса 1 от слива. Поток рабочей жидкости от насоса 1 через заклапанную полость 4 и гидрораспределитель 2 поступает к первому входу 5, к доклапанной полости 50 клапана ИЛИ 40, а также через обратный клапан 45 к доклапанной полости 47 датчика 37 сервоуправления. Указанный датчик под действием электромагнита 39 перемещается в сторону доклапанной полости 47, перекрывая упомянутый поток рабочей жидкости. При этом межседельная полость 44 датчика 37 и управляющая полость 43 плунжера 42, второй вход 22 блока 6 сервоуправления, управляющие полости 18 и 19 впускного 10 и выпускного 20 клапанов, а через дроссельное отверстие последнего заклапанная 16 и доклапанная 28 полости этих клапанов и полость 14 подъема соединяются со сливом. Плунжер 42 под действием пружины 41 смещается в сторону управляющей полости 43, а клапан ИЛИ 40 перемещается давлением рабочей жидкости из заклапанной полости 4 в сторону заклапанной полости 52, отсоединяя межседельную полость 51 от слива. Доклапанная полость 50 соединяется с упомянутой межседельной полостью, а через третий вход 27 - с управляющими полостями 23 и 24 впускного 11 и выпускного 25 клапанов, а также через дроссельное отверстие последнего - с доклапанной 29 и заклапанной 17 полостями этих клапанов и с полостью 15 опускания. Поток рабочей жидкости из заклапанной полости 4 через межседельную полость 51 клапана ИЛИ 40, третий вход 27 поступает в управляющие полости 23 и 24 впускного 11 и выпускного 25 клапанов, а также через дроссельное отверстие последнего - в заклапанную 17 и доклапанную 29 полости этих клапанов и в полость 15 опускания, которые разгружены по давлению. Под действием перепада давлений, возникающего на упомянутом дроссельном отверстии, впускной клапан 11 перемещается, сжимая пружину 13, в сторону заклапанной полости 17 и соединяет последнюю и полость 15 опускания с доклапанной полостью 31 и насосом 1. Выпускной клапан 25 в это время смещен упомянутым перепадом давлений и пружиной 26 в сторону доклапанной полости 29 и отсоединяет ее и полость 15 опускания от слива. Поток рабочей жидкости от насоса 1 поступает в полость 15 опускания, и поршень 34 перемещается в сторону полости 14 подъема, вытесняя из нее рабочую жидкость. Поток рабочей жидкости из упомянутой полости подъема создает на дроссельном отверстии выпускного клапана 20 перепад давлений. Указанный клапан перемещается под действием этого перепада, сжимая пружину 21, в сторону управляющей полости 19 и соединяет доклапанную полость 28 и полость 14 подъема с заклапанной полостью 32 и сливом. Таким образом, рабочая жидкость из упомянутой полости отводится на слив и происходит принудительное опускание навесного орудия 35. Впускной клапан 10 под действием упомянутого перепада давлений и пружины 12 смещен в сторону управляющей полости 18 и отсоединяет заклапанную полость 16 и полость 14 подъема от доклапанной полости 30 и насоса 1. Электрогидравлическая система управления навесными орудиями, исключающая их подвижность при фиксировании в заданном положении как в сторону подъема, так и в сторону опускания работает следующим образом. Фиксирование навесного орудия 35 в заданном положении осуществляется при одновременном обесточивании электромагнитов 56, 57 и 58. На чертеже система изображена в указанном положении. При обесточенном электромагните 56 датчик 53 сервоуправления соединяет доклапанную полость 67, первый вход 5 блока 6 сервоуправления и заклапанную полость 4 перепускного клапана 3 со сливом, что обеспечивает его открытие и сообщение насоса 1 со сливом. Полость 14 подъема силового гидроцилиндра 9, заклапанная 16 и доклапанная 28 полости впускного 10 и выпускного 20 клапанов, а также посредством дроссельного отверстия последнего управляющие полости 18 и 19 этих клапанов и посредством второго входа 22 межседельная полость 63 датчика 54 сервоуправления находятся под давлением рабочей жидкости, создаваемым весом навесного орудия 35. Вследствие этого при обесточенном электромагните 57 датчик 54 сервоуправления смещен в сторону заклапанной полости 65 и соединяет межседельную 63 и доклапанную 61 полости. Обратный клапан 59 под действием упомянутого давления закрыт и отсоединяет указанную доклапанную полость от первого входа 5. Впускной клапан 20 смещен благодаря этому давлению и пружине 21 в сторону доклапанной полости 28 и отсоединяет ее и полость 14 подъема от заклапанной полости 32 и от слива, а впускной клапан 10 смещен пружиной 12 в сторону управляющей полости 18 и отсоединяет доклапанную полость 30 и насос 1 от заклапанной полости 16 и полости 14 подъема. При обесточенном электромагните 58 датчик 55 сервоуправления соединяет межседельную полость 64, третий вход 27 блока 6 сервоуправления, управляющие полости 23 и 24 впускного 11 и выпускного 25 клапанов, а через дроссельное отверстие последнего заклапанную 17 и доклапанную 29 полости этих клапанов, а также полость 15 опускания со сливом. Впускной клапан 11 при этом смещен пружиной 13 в сторону управляющей полости 23 и отсоединяет заклапанную полость 17 и полость 15 опускания от доклапанной полости 31 и от насоса 1, а выпускной клапан 25 смещен пружиной 26 в сторону доклапанной полости 29 и отсоединяет ее и полость 15 опускания от заклапанной полости 33 и от слива. Так исключается подвижность навесного орудия 35 в строну опускания. При внешнем силовом воздействии на навесное орудие 35 в сторону подъема в полости 15 опускания, заклапанной 17 и доклапанной 29 полостях впускного 11 и выпускного 25 клапанов, а также посредством дроссельного отверстия последнего в управляющих полостях 23 и 24 этих клапанов и посредством третьего входа 27 в межседельной полости 64 датчика 55 сервоуправления создается давление рабочей жидкости. Под действием этого давления при обесточенном электромагните 58 упомянутый датчик сервоуправления перемещается в сторону заклапанной полости 66 и соединяет межседельную 64 и доклапанную 62 полости. Обратный клапан 60 закрыт и отсоединяет доклапанную полость 62 от первого входа 5. Выпускной клапан 25 смещен под действием упомянутого давления и пружины 26 в сторону доклапанной полости 29 и отсоединяет ее и полость 15 опускания от заклапанной полости 33 и от слива, а впускной клапан 11 смещен пружиной 13 в сторону управляющей полости 23 и отсоединяет заклапанную полость 17 и полость 15 опускания от доклапанной полости 31 и от насоса 1. Так исключается подвижность навесного орудия 35 в сторону подъема. Поршень 34 и навесное орудие 35 сохраняют при этом заданное фиксированное положение. Для осуществления подъема навесного орудия 35 возбуждаются электромагниты 56 и 58. Датчик 53 сервоуправления перемещается в сторону доклапанной полости 67 и отсоединяет ее, а также первый вход 5 блока 6 сервоуправления и заклапанную полость 4 перепускного клапана 3 от слива. Это вызывает закрытие перепускного клапана 3 и отсоединения насоса 1 от слива. Поток рабочей жидкости от насоса 1 через заклапанную полость 4 и гидрораспределитель 2 поступает к первому входу 5 и через обратные клапаны 59 и 60 к доклапанным полостям 61 и 62 датчиков 54 и 55 сервоуправления. При возбужденном электромагните 58 датчик 55 сервоуправления перемещается в сторону доклапанной полости 62, отсоединяя ее от межседельной полости 64, которая соединяется с заклапанной полостью 66 и со сливом. При этом со сливом также соединяются третий вход 27 блока 6 сервоуправления, управляющие полости 23 и 24 впускного 11 и выпускного 25 клапанов, а через дроссельное отверстие последнего заклапанная полость 17 впускного клапана и полость 15 опускания. При обесточенном электромагните 57 в случае отсутствия весового воздействия со стороны навесного орудия 35 датчик 54 сервоуправления перемещается под действием давления рабочей жидкости из заклапанной полости 4 в сторону заклапанной полости 65, отсоединяя межседельную полость 63 от слива и соединяя ее с доклапанной полостью 61. При весовом воздействии со стороны навесного орудия 35 упомянутый датчик сервоуправления смещен в сторону заклапанной полости 65 под действием давления рабочей жидкости, создаваемого весом этого навесного орудия. Поток рабочей жидкости из заклапанной полости 4 через межседельную полость 63 и второй вход 22 поступает в управляющие полости 18 и 19 впускного 10 и выпускного 20 клапанов, а также через дроссельное отверстие последнего - в заклапанную 16 и доклапанную 28 полости этих клапанов и в полость 14 подъема. Последовательность перемещений и взаиморасположение элементов гидрораспределителя 8 силового гидроцилиндра 9 при этом соответствуют работе этих элементов (при подъеме навесного орудия 35) электрогидравлической системы управления навесными орудиями, обеспечивающей их подвижность в сторону подъема (фиг.1). Опускание навесного орудия 35 под действием собственного веса осуществляется при возбуждении электромагнитов 57 и 58. При возбуждении электромагнита 57 датчик 54 сервоуправления перемещается в сторону доклапанной полости 61. При этом межседельная полость 63, второй вход 22 блока 6 сервоуправления, управляющие полости 18 и 19 впускного 10 и выпускного 20 клапанов, а через дроссельное отверстие последнего заклапанная 16 и доклапанная 28 полости этих клапанов, а также полость 14 пдъема силового гидроцилиндра 9 соединяются с заклапанной полостью 65 датчика 54 сервоуправления и со сливом. При возбуждении электромагнита 58 датчик 55 сервоуправления перемещается в сторону доклапанной полости 62. Межседельная полость 64, третий вход 27 блока 6 сервоуправления, управляющие полости 23 и 24 впускного 11 и выпускного 25 клапанов, а через дроссельное отверстие последнего заклапанная 17 и доклапанная 29 полости этих клапанов, а также полость 15 опускания соединяются с заклапанной полостью 66 датчика 55 сервоуправления и со сливом. При обесточенном электромагните 56 датчик 53 сервоуправления соединяет доклапанную полость 67, первый вход 5 и заклапанную полость 4 перепускного клапана 3 со сливом, что обеспечивает его открытие и сообщение насоса 1 со сливом. Обратные клапаны 59 и 60 при этом закрыты и отсоединяют первый вход 5 соответственно от доклапанных полостей 61 и 62 датчиков сервоуправления. Последовательность перемещений и взаиморасположение элементов гидрораспределителя 8 силового гидроцилиндра 9 соответствуют работе этих элементов (при опускании навесного орудия 35 под действием собственного веса) электрогидравлической системы управления навесными орудиями, обеспечивающей их подвижность в сторону подъема (фиг.1). Принудительное опускание навесного орудия 35 под действием давления рабочей жидкости, создаваемого насосом 1, происходит при возбуждении электромагнитов 56 и 57. Датчик 53 сервоуправления перемещается в сторону доклапанной полости 67 и отсоединяет ее, а также первый вход 5 блока 6 сервоуправления и заклапанную полость 4 перепускного клапана 3 от слива. Это вызывает его закрытие и отсоединение насоса 1 от слива. Поток рабочей жидкости от насоса 1 через заклапанную полость 4 и гидрораспределитель 2 поступает к первому входу 5 и через обратные клапаны 59 и 60 к доклапанным полостям 61 и 62 датчиков 54 и 55 сервоуправления. При возбужденном электромагните 57 датчик 54 сервоуправления перемещается в сторону доклапанной полости 61, отсоединяя ее от межседельной полости 63, которая соединяется с заклапанной полостью 65 и со сливом. Со сливом также соединяются второй вход 22 блока 6 сервоуправления, управляющие полости 18 и 19 впускного 10 и выпускного 20 клапанов, а через дроссельное отверстие последнего - заклапанная 16 и доклапанная 28 полости этих клапанов и полость 14 подъема. Под действием давления рабочей жидкости из заклапанной полости 4 при обесточенном электромагните 58 датчик 55 сервоуправления перемещается в сторону заклапанной полости 66 и соединяет доклапанную полость 62 с межседельной 64. Поток рабочей жидкости из заклапанной полости 4 через межседельную полость 64, третий вход 27 поступает в управляющие полости 23 и 24 впускного 11 и выпускного 25 клапанов, а через дроссельное отверстие последнего - в заклапанную 17 и доклапанную 29 полости этих клапанов и в полость 15 опускания, которые разгружены по давлению. Последовательность перемещений и взаиморасположение элементов гидрораспределителя 8 силового гидроцилиндра 9 при этом соответствуют работе этих элементов (при принудительном опускании навесного орудия 35) электрогидравлической системы управления навесными орудиями, обеспечивающей их подвижность в сторону подъема (фиг.1). Формула изобретения1. ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ НАВЕСНЫМИ ОРУДИЯМИ, содержащая насос, силовой гидроцилиндр, гидравлически связанные посредством перепускного и выпускного клапанов со сливом, гидрораспределитель силового гидроцилиндра, установленный в напорной линии насоса, блок сервоуправления, первый вход которого связан с заклапанной полостью перепускного клапана, а второй вход - с управляющей полостью выпускного клапана, отличающаяся тем, что, с целью уменьшения запаздывания срабатывания путем реализации нулевого перекрытия в гидрораспределителе силового гидроцилиндра, упомянутый гидрораспределитель выполнен в виде пары уравновешенных двухпозиционных однолинейных впускных клапанов, установленных параллельно между насосом и полостями подъема и опускания силового гидроцилиндра, причем полость опускания силового гидроцилиндра связана со сливом через дополнительно введенный выпускной клапан, управляющая полость которого соединена с управляющей полостью впускного клапана со стороны полости опускания силового гидроцилиндра и с третьим входом блока сервоуправления. 2. Система по п.1, отличающаяся тем, что блок сервоуправления содержит одно- и двухседельный датчики сервоуправления, заклапанные полости которых соединены со сливом, при этом первый вход упомянутого блока является выходом доклапанной полости односедельного датчика сервоуправления, второй вход является выходом межседельной полости двухседельного датчика сервоуправления, а третий вход образован гидролинией, связанной с межседельной полостью дополнительно введенного клапана ИЛИ, кинематически связанного с плунжером, при этом управляющая полость последнего соединена с межседельной полостью двухседельного датчика сервоуправления и с вторым входом блока сервоуправления, первый вход которого, кроме того, соединен с доклапанной полостью клапана ИЛИ, а его заклапанная полость сообщена со сливом, причем доклапанная полость односедельного датчика сервоуправления связана через дополнительно введенный обратный клапан с одноименной полостью двухседельного датчика сервоуправления. 3. Система по п.1, отличающаяся тем, что блок сервоуправления снабжен парой двухседельных и односедельным серводатчиками, заклапанные полости которых соединены со сливом, при этом первый вход упомянутого блока связан через дополнительно введенные обратные клапаны с доклапанными полостями двухседелных серводатчиков и с доклапанной полостью односедельного серводатчика, а второй и третий входы - соответственно с межседельными полостями этих серводатчиков.MM4A Досрочное прекращение действия патента Российской Федерации на изобретение из-за неуплаты в установленный срок пошлины за поддержание патента в силе Номер и год публикации бюллетеня: 27-2000 Извещение опубликовано: 27.09.2000 Популярные патенты: 2057432 Биологический состав кузнецова для подсочки деревьев, в том числе каучуконосов (варианты), и способ его приготовления ... имели различные диаметры стволов. В табл. 1 приведены три варианта основного состава, в табл. 2 полученные результаты округленные до целых величин. Проверка проводилась во второй половине июля, в лучшее время сезона подсочки по выходу живицы. Для научной проверки был взят ряд составов, являющихся отдельными фрагментами предлагаемого состава или фрагментами в качестве добавок к базовым стимуляторам смолообразования и смоловыделения при подсочке сосны. В табл. 3 приведены составы, в табл. 4 результаты проверки этих составов в сезонах 1983-1985 гг. цикл нанесения карроподнов 5 суток. Выводы. Сульфитно-дрожжевая бражка (СДБ) как стимулятор приемлема для подсочки только в период первой ... 2165701 Фунгицидная композиция и способ обработки культур для борьбы или профилактики грибковых заболеваний ... весовое соотношение между бромуконазолом и тебуконазолом составляло 1; 1,5; 2; 2,5; 3. Пшеницу (сорт "Talent") выращивали в горшочках. Растения, достигшие возраста 14 суток, что соответствует стадии Zadoks 11, обработали обрызгиванием каждой из указанных композиций. Шкала Задокса (Zadoks) описана в статье, опубликованной в Phytiatrie phytophamiacie, 1977 г., 26, стр. 129-140, и озаглавленной "Десятичный код для стадии роста хлебных злаков", авторы: Zadoks J.C., Chang Т.Т., Konzak C. F. Спустя 24 часа после обработки производили заражение каждого растения разбрызгиванием водной суспензии спор Puccinia recondita (100000 спор на 1 см3). После такого заражения растения пшеницы были ... 2492633 Устройство для автоматического полива ... воздушной камеры сообщается с верхней частью полости накопителя воды посредством трубопровода, в накопителе воды отверстие впускного конца сливного трубопровода расположено ниже отверстия выпускного конца всасывающего трубопровода, внешняя часть всасывающего трубопровода снабжена водо-воздушным затвором, представляющим собой отвесный участок, внешняя часть сливного трубопровода снабжена водо-воздушным затвором, представляющим собой U-образный прогиб.На фиг.1 представлен общий вид устройства, установленного на поверхности водоема с использованием плавучей опоры.Устройство содержит воздушную камеру 1, накопитель 2 воды, трубопровод 3, посредством которого полость камеры 1 ... 2288561 Устройство для предпосевной обработки семян растений ... из хлопка. Один из валков 6 приводится во вращение приводом (не показан). Над транспортерной лентой 7 размещен плоский электрод 8, а под лентой 7 установлен второй плоский электрод 9. Электроды 8 и 9 подключены к высокочастотному генератору 10. Держатель 11 электрода 8 пропущен через изолятор 12, а сам электрод 8 установлен с возможностью возвратно-поступательного перемещения в вертикальном направлении относительно поверхности транспортерной ленты 7, например, с помощью реверсивного привода 13. Электрод 8 выполнен длиной l и шириной b, удовлетворяющими соотношениям:l=(0,5-0,9)·L, мм;b=(0,5-0,7)·B, мми преимущественно устанавливается над транспортерной лентой 7 на ... 2154629 Производные оксима, способ их получения, фунгицидное средство и способ борьбы с грибковыми заболеваниями ... действие соединения примера 4. Оно составляет 100%. В данном опыте соединения примеров 2, 4 и 11 проявляют защитное действие, равное 100%. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Производные оксима общей формулы I где Ar - арилен; E - прямая связь, 2-аза-1-алкен-1,1-диил, имеющий в положении 2 радикал R1, 2-аза-1-алкен-1,1-диил, имеющий в положении 2 радикал R2, при этом R1 означает алкил, а R2 - водород, алкил или алкоксил; G - группа -O-CH2-, -C(R3)=N-O-CH2- или -CH2-O-N=C(R3)-, где R3 означает водород или алкил; X - группа -OX1, -SX1, -SOX1, -SO2X1 или -NX2X3, причем X1, X2 и X3 независимы и означают водород, низший алкил, или X2 и X3 вместе с атомом азота образуют гетероцикл с 1 - 2 ... |
Еще из этого раздела: 2415570 Искусственное роение и борьба с естественным роением пчелиных семей 2463776 Система и способ для массовой валки деревьев 2165141 Тепличный гидропонный комплекс 2053661 Устройство для сколачивания ульевых рамок 2248352 Замещенные бензоилциклогександионы, гербицидное средство на их основе, исходное соединение 2206985 Упряжь для собак 2230467 Добавка к пищевым продуктам, биоцидный препарат, 2-(1-окси- 4-гидроксифенилен)-бензохинон (варианты) и способ его получения 2387128 Система сбора отходов для отделения жидких отходов от твердых отходов 2228588 Копатель корнеклубнеплодов 2287923 Роторный энергосберегающий мостовой агрегат для сельскохозяйственных работ |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||