Манипулятор доенияПатент на изобретение №: 2186486 Автор: Кормановский Л.П., Пурецкий В.М., Соловьев Р.В., Макаров Э.Р., Соловьев В.Р. Патентообладатель: Научно-исследовательский институт сельского хозяйства центральных районов нечерноземной зоны Дата публикации: 10 Марта, 2002 Начало действия патента: 26 Апреля, 2000 Адрес для переписки: 143026, Московская обл., Одинцовский р-н, п/о Немчиновка-1, ул. Калинина, 1, НИИСХ Изображения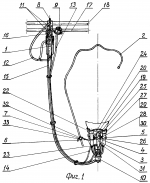 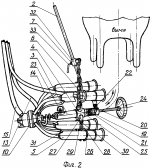 Изобретение относится к животноводству, в частности к манипуляторам доения коров. В переносном манипуляторе доения, включающем в качестве основных узлов автомат управления, исполнительный механизм, дугообразную подвеску и улавливатель доильных стаканов, исполнительный механизм выполнен в виде вертикально смонтированного на коллекторе доильного аппарата между стаканами пневмоцилиндра со штоком, верхний конец которого оборудован оголовком в виде эллипсоида с горизонтальной большой осью, а доильный аппарат центрирован в разрезных кольцах саморегулируемых телескопических связей улавливателя доильных стаканов, закрепленного на исполнительном механизме и соединенного с подвеской гибкой связью, регулируемой по высоте. Упрощает конструкцию, повышает удобство пользования. 4 з.п. ф-лы, 2 ил. Изобретение относится к сельскому хозяйству, в частности к манипуляторам доения. Известны манипуляторы доения, включающие в качестве основных узлов автомат управления, исполнительный механизм и гибкую подвеску (1). Указанные манипуляторы имеют ряд недостатков, главными из которых являются громоздкость и неудобство в эксплуатации, так как исполнительный механизм, выполненный в виде гофрированного шланга, прикрепляется одним концом к полу стойла или к боковым стойкам (разделителям) стойлового оборудования. Гибкую подвеску, также соединенную одним концом с коллектором доильного аппарата, другим приходится прикреплять к натянутой поперек стойл проволоке (тросу, струне и др. ). Закреплять же гибкую подвеску на теле животного, опоясывая ее вокруг тела последнего, тоже довольно сложно и неудобно. Кроме того, поплавковый пневмодатчик автомата управления, подвижный шток которого "загружен" подведенными к нему шлангами, снижает эксплуатационную надежность манипулятора. Ввиду указанных недостатков манипуляторы такого типа могут применяться для доения коров в основном на доильных площадках или доильных установках в качестве стационарных устройств. Наиболее близким по технической сущности и достигаемому результату к предлагаемому техническому решению - его прототипом является манипулятор доения, включающий автомат управления с "разгруженным" от шлангов штоком пневмодатчика, исполнительный механизм и подвеску и выполненный переносным (2). Недостатком указанного манипулятора является то, что исполнительный механизм, выполненный в виде гофрированной трубки, заключенной в ограждение, вмонтирован в подвеску, навешиваемую на круп животного, что делает подвеску более громоздкой и утяжеляет ее, а сам исполнительный механизм - уязвимым для повреждения или поломки. Кроме того, размещение исполнительного механизма в составе подвески обуславливает наличие U-образной направляющей для гибкой тяги и самой гибкой тяги, соединяющей исполнительный механизм с коллектором (для того чтобы доильный аппарат оттягивать вниз), что усложняет передачу команды (усилия) от исполнительного механизма к коллектору доильного аппарата. Целью изобретения является упрощение конструкции, повышение удобства и надежности в эксплуатации. Поставленная цель достигается тем, что в манипуляторе доения, включающем в качестве основных узлов автомат управления, исполнительный механизм, подвеску, выполненную в виде дуги с элементами копирования поперечного профиля тела животного, и улавливатель доильных стаканов, исполнительный механизм выполнен в виде пневмоцилиндра, вертикально смонтированного на коллекторе доильного аппарата между доильными стаканами и снабженного в верхней и нижней частях его корпуса отверстиями, с помощью которых верхняя часть корпуса пневмоцилиндра сообщается с пневмодатчиком автомата управления, а нижняя - с атмосферой, причем верхний свободный конец штока поршня пневмоцилиндра оборудован оголовком, а доильный аппарат в исходном положении удерживается улавливателем доильных стаканов, закрепленным на исполнительном механизме и соединенным с дугообразной подвеской посредством гибкой связи (цепочка, леска и др.). Для дополнительного регулирования установки доильного аппарата по высоте в случае выхода за принятые пределы высоты расположения вымени у животных и его размеров в силу таких факторов, как порода, возраст, молочная продуктивность и др. , гибкая связь дугообразной подвески и улавливателя доильных стаканов прикреплена к дугообразной подвеске посредством устройства для регулирования ее установки по высоте, при этом улавливатель доильных стаканов выполнен в виде охватывающего корпус пневмоцилиндра исполнительного механизма хомутика и жестко прикрепленных к нему саморегулируемых телескопических связей, крестообразно расположенных вокруг пневмоцилиндра и снабженных разрезными кольцами для свободного размещения в них доильных стаканов. Устройство для регулирования установки по высоте гибкой связи между улавливателем доильных стаканов и дугообразной подвеской состоит из выполненного прямолинейным конца дуги подвески и расположенной на нем с возможностью перемещения по нему втулки, снабженной фиксатором ее хода, выполненным в виде стопорного винта с поворотной ручкой, при этом один конец гибкой связи, соединяющей улавливатель доильных стаканов с дугообразной подвеской, прикреплен к охватывающему корпус пневмоцилиндра исполнительного механизма хомутику улавливателя доильных стаканов, а другой - к расположенной на прямолинейном конце дуги подвески втулке устройства для регулирования установки данной гибкой связи по высоте. Саморегулируемые телескопические связи улавливателя доильных стаканов включают неподвижную трубку и расположенный в ней с возможностью перемещения палец, причем один конец трубки жестко прикреплен к охватывающему корпус пневмоцилиндра исполнительного механизма хомутику, а другой выполнен в виде горловины с меньшим внутренним диаметром, при этом один конец пальца, находящийся в трубке, снабжен головкой, диаметр которой превышает внутренний диаметр горловины трубки, а другой (вне трубки) - разрезным кольцом с размещенным в нем с возможностью перемещения доильным стаканом, причем величина зазора в месте разреза кольца превышает толщину бокового вакуумштуцера доильного стакана. С целью избежания стрессов у животных от физических воздействий рабочего органа исполнительного механизма на вымя животного при работе пневмоцилиндра оголовок штока поршня выполнен в виде эллипсоида с горизонтально расположенной большой осью, размещенного в межсосковом пространстве вымени животного между головками сосковой резины на доильных стаканах, и в стартовом положении находится на одном с ними уровне. Для устранения негативного влияния температурных факторов на межсосковое пространство вымени животного при соприкосновении с ним оголовка штока поршня пневмоцилиндра оголовок штока покрыт эластичным материалом с низкой теплопроводностью, например губчатой резиной, кожей, фетром и др. Признаки заявляемого технического решения (например, исполнительный механизм манипулятора, выполненный в виде смонтированного на коллекторе доильного аппарата пневмоцилиндра со штоком, оборудованным оголовком в виде эллипсоида с горизонтальной большой осью, и центрирование доильного аппарата в разрезных кольцах саморегулируемых телескопических связей улавливателя доильных стаканов, соединенного с подвеской гибкой связью, регулируемой по высоте, в сравнении с признаками прототипа являются новыми, что позволяет сделать вывод о соответствии заявленного технического решения критерию "новизна". В то же время указанные признаки, отличающие предлагаемое техническое решение от прототипа, не выявлены в других технических решениях, что позволяет сделать вывод о его соответствии критерию "существенные отличия", так как именно они позволяют достичь поставленную цель. На фиг.1 изображен общий вид предложенного манипулятора. На фиг.2 - исполнительный механизм с доильным аппаратом и улавливателем доильных стаканов, гибкая связь подвески с исполнительным механизмом и улавливателем доильных стаканов, устройство для ручной регулировки установки гибкой связи по высоте (после автоматического снятия доильного аппарата с вымени). Манипулятор доения включает: автомат управления 1 (фиг.1), подвеску 2, исполнительный механизм 3 (фиг.1, 2), улавливатель 4 доильных стаканов 5, гибкую связь 6 исполнительного механизма 3 и улавливателя 4 доильных стаканов 5 с дугообразной подвеской 2 для удерживания доильного аппарата в исходном положении, устройство 7 для регулирования установки гибкой связи 6 по высоте и доильную аппаратуру, включающую ручку 8 (фиг.1), пульсатор 9, доильный аппарат с доильными стаканами 5 (фиг.1, 2) и коллектором 10 и соединительные вакуумные и молочные шланги: магистральный вакуумный шланг 11 (фиг.1), магистральный молочный шланг 12, шланг переменного вакуума 13 (фиг. 1, 2), шланг периодического вакуума 14 и молочный шланг 15. В состав узлов входят следующие детали: 16 - шток пневмодатчика автомата управления (фиг.1), 17 - вакуумпровод, 18 - молокопровод, 19 - пневмоцилиндр исполнительного механизма (фиг.1, 2), 20 - шток поршня пневмоцилиндра, 21 - поршень пневмоцилиндра (фиг.2), 22 - отверстие верхней части корпуса пневмоцилиндра над поршнем (фиг.1, 2), 23 - отверстие нижней части корпуса пневмоцилиндра под поршнем, оборудованное сапуном, 24 - оголовок штока поршня пневмоцилиндра, 25 - хомутик улавливателя доильных стаканов, 26 - разрезное кольцо для доильного стакана, 27 - неподвижная трубка саморегулируемой телескопической связи улавливателя доильных стаканов, 28 - подвижный палец саморегулируемой телескопической связи, 29 - горловина неподвижной трубки, 30 - головка подвижного пальца, 31 - боковой вакуумштуцер доильного стакана, 32 - втулка устройства для регулирования установки гибкой связи по высоте, 33 - фиксатор хода втулки (стопорный винт с поворотной ручкой). Автомат управления 1 (фиг. 1) состоит из поплавкового пневмодатчика с "разгруженным" от шлангов штоком 16, одна из вакуумных камер которого соединена с помощью магистрального вакуумного шланга 11 с вакуумпроводом 17, другая - с помощью шланга периодического вакуума 14 - с исполнительным механизмом 3, а молочные камеры пневмодатчика соединены посредством магистрального молочного шланга 12 с молокопроводом 18 и посредством молочного шланга 15 - с коллектором 10 доильного аппарата. Автомат управления смонтирован на ручке 8 доильной аппаратуры. Подвеска 2 выполнена в виде дуги с элементами копирования поперечного профиля тела животного. Свободный конец дугообразной подвески 2 соединен с исполнительным механизмом 3 и улавливателем 4 доильных стаканов 5 гибкой связью 6 (фиг. 1, 2), с помощью которой доильный аппарат вместе с исполнительным механизмом 3 и улавливателем 4 доильных стаканов 5 удерживается в исходном положении, регулируемом по высоте, для чего на свободном конце подвески, выполненном прямолинейным, смонтировано устройство 7 для регулирования установки данной гибкой связи 6 по высоте. Исполнительный механизм 3 состоит из пневмоцилиндра 19, вертикально смонтированного на коллекторе 10 доильного аппарата между доильными стаканами 5 и включающего шток 20 и поршень 21 (фиг.2). Верхняя часть корпуса пневмоцилиндра 19 (над поршнем 21) посредством отверстия 22, выполненного в ней, и шланга периодического вакуума 14 сообщается с пневмодатчиком автомата управления 1 (фиг.1), а нижняя - (под поршнем 21) посредством отверстия 23 - с атмосферой. Для предотвращения попадания под поршень 21 посторонних включений и засорения отверстия 23 при работе пневмоцилиндра 19, особенно при подъеме поршня 21 со штоком 20 вверх, отверстие 23, соединяющее нижнюю часть корпуса пневмоцилиндра 19 с атмосферой, оборудовано сапуном. Верхний (свободный) конец штока 20 поршня 21, выступающий над корпусом пневмоцилиндра 19, оборудован оголовком 24, выполненным в виде эллипсоида с горизонтально расположенной большой осью, размещенного в межсосковом пространстве вымени животного между головками сосковой резины на доильных стаканах 5, и в стартовом положении находится на одном с ними уровне, при этом эллипсоидный оголовок 24 штока 20 поршня 21 покрыт эластичным материалом с низкой теплопроводностью, например, губчатой резиной, кожей, фетром и др. Улавливатель 4 доильных стаканов 5 выполнен в виде охватывающего корпус пневмоцилиндра 19 исполнительного механизма 3 хомутика 25 и жестко прикрепленных к нему саморегулируемых телескопических связей, крестообразно расположенных вокруг пневмоцилиндра 19 и снабженных разрезными кольцами 26 для свободного размещения в них доильных стаканов 5. Саморегулируемые телескопические связи улавливателя 4 доильных стаканов 5 включают неподвижную трубку 27 и расположенный в ней с возможностью перемещения палец 28. Один конец трубки 27 жестко прикреплен к хомутику 25, охватывающему корпус пневмоцилиндра 19 исполнительного механизма 3, а другой выполнен в виде горловины 29 с меньшим внутренним диаметром. Один конец подвижного пальца 28, находящийся в трубке 27, снабжен головкой 30, диаметр которой превышает внутренний диаметр горловины 29 трубки 27, а другой (вне трубки 27) - разрезным кольцом 26 с размещенным в нем с возможностью перемещения доильным стаканом 5, причем величина зазора в месте разреза кольца 26 превышает толщину бокового вакуумштуцера 31 доильного стакана 5. Гибкая связь 6, соединяющая подвеску 2 с исполнительным механизмом 3 и смонтированным на нем улавливателем 4 доильных стаканов 5 и предназначенная для удерживания доильного аппарата в исходном положении, может быть выполнена в виде цепочки, лески и т.п. Длина гибкой связи 6 и высота ее закрепления на выполненном прямолинейным конце дуги подвески 2 зависит от размеров вымени и высоты его расположения у животных. В данном устройстве длина гибкой связи 6 принята по максимуму, а высота ее закрепления на прямолинейном конце подвески 2 - по оптимальному (среднему) значению этого показателя с возможностью регулирования ее установки по высоте. Однако в любом случае, даже при максимальной длине гибкой связи 6 и минимальной высоте ее закрепления на подвеске 2, конструкция устройства выполняет условие, когда доильный аппарат в исходном (нерабочем) положении находится на высоте не менее 5 см над уровнем пола стойла. Один конец гибкой связи 6 прикреплен к хомутику 25 улавливателя 4 доильных стаканов 5, охватывающему корпус пневмоцилиндра 19 исполнительного механизма 3, а другой - к расположенной на прямолинейном конце дуги подвески 2 втулке 32 устройства 7 для регулирования установки данной гибкой связи 6 по высоте. В исключительных случаях возможно дополнительное регулирование установки гибкой связи 6 по высоте за счет перемещения хомутика 25 (и, следовательно, улавливателя 4 доильных стаканов 5) на корпусе пневмоцилиндра 19 исполнительного механизма 3, но не в ущерб надежности удерживания доильного аппарата улавливателем 4 доильных стаканов 5. Устройство 7 для регулирования установки гибкой связи 6 по высоте состоит из выполненного прямолинейным конца дуги подвески 2 и расположенной на нем с возможностью перемещения по нему втулки 32, снабженной фиксатором 33 ее хода, выполненным в виде стопорного винта с поворотной ручкой. Наличие гибкой связи 6 между подвеской 2 и улавливателем 4 доильных стаканов 5 с возможностью регулирования ее установки по высоте, а при необходимости - и по длине позволяет оператору машинного доения быстро корректировать, в случае необходимости, высоту исходного положения доильного аппарата в зависимости от высоты расположения вымени животного, обусловленной такими факторами, как порода, возраст, молочная продуктивность и др. При правильно отрегулированной гибкой связи 6 необходимость в дополнительной ее регулировке возникает довольно редко. Технологический процесс доения животных с помощью предложенного манипулятора и его работа осуществляются следующим образом. Оператор, установив поршень 21 пневмоцилиндра 19 в крайнее нижнее положение легким нажатием руки на оголовок 24 штока 20 поршня 21, навешивает на круп животного в области пояснично-крестцовых выступов и впадин подвеску 2 (фиг.1), оснащенную доильным аппаратом с исполнительным механизмом 3 и улавливателем 4 доильных стаканов 5, закрепляет ручку 8 доильной аппаратуры с автоматом управления 1 на молочно-вакуумном кране, фиксирует шток 16 пневмодатчика автомата управления 1 в исходном положении и, установив с помощью регулируемой гибкой связи 6 посредством стопорного винта 33 доильный аппарат на оптимальной высоте (в случае необходимости), надевает его на подготовленное к доению вымя животного. В стартовом положении пневмодатчика, когда шток 16 находится в исходном положении, исполнительный механизм 3 манипулятора обеспечивает его работоспособность в начальный период процесса доения. При увеличении интенсивности молокоотдачи (до 400 мл/мин) шток 16 пневмодатчика переходит в плавающее положение, а пневмодатчик с исполнительным механизмом 3 - в режим автоматического контроля за процессом доения. При снижении потока молока, одной из причин которого может быть "наползание" доильных стаканов 5 на соски вымени и пережатие молочных протоков сосков вымени, шток 16 пневмодатчика опускается вниз и делает сообщающимися между собой вакуумные камеры автомата управления 1, соединенные посредством магистрального вакуумного шланга 11 с вакуумпроводом 17 с одной стороны и с помощью шланга периодического вакуума 14 и отверстия 22 в верхней части корпуса пневмоцилиндра 19 - с пространством над поршнем 21 исполнительного механизма 3 - с другой, вследствие чего поршень 21 под действием создавшегося над ним вакуума поднимается вместе со штоком 20 в пневмоцилиндре 19 вверх, и оголовок 24 штока 20 поршня 21, упираясь в межсосковое пространство вымени животного, передает толкательное усилие через корпус пневмоцилиндра 19 на коллектор 10 доильного аппарата, в результате чего доильный аппарат постепенно стягивается (с усилием 2,5-3,0 кг) с сосков вымени животного, устраняя пережатие молочных протоков сосков вымени и обеспечивая выполнение операции машинного додаивания. Следует отметить, что предложенная конструкция исполнительного механизма 3, рабочий орган которого (оголовок 24 штока 20 поршня 21) выполнен в виде эллипсоида с горизонтально расположенной большой осью, покрытого эластичным материалом с низкой теплопроводностью, при выполнении операции машинного додаивания имитирует действия теленка при сосании вымени коровы, который, инстинктивно тыкаясь носом в вымя коровы, вольно или невольно производит массаж ее вымени, стимулируя рефлекс молокоотдачи и способствуя большей полноте выдаивания вымени животного. Если поток молока возрастает, шток 16 пневмодатчика приподнимается вверх, благодаря чему вакуумные камеры автомата управления 1 разобщаются, усилие со стороны исполнительного механизма 3 ослабевает и доение происходит в обычном режиме. Когда поток молока снижается до 200 мл/мин, шток 16 пневмодатчика автомата управления 1 опускается вниз и разобщает между собой молочные камеры пневмодатчика, в результате чего подсосковые камеры доильных стаканов 5 отключаются от действия вакуума, одновременно с этим вакуумные камеры пневмодатчика становятся сообщающимися между собой и исполнительный механизм 3 под действием вакуума, создавшегося в пневмоцилиндре 19 над поршнем 21, опираясь оголовком 24 штока 21 о межсосковое пространство вымени животного, по мере снижения потока молока производит автоматизированную стимуляцию рефлекса молокоотдачи, а по завершении процесса доения легко снимает доильный аппарат с вымени коровы, который, спадая с вымени вместе с исполнительным механизмом 3 и улавливателем 4 доильных стаканов 5, удерживается в подвешенном состоянии над полом стойла на подвеске 2 посредством гибкой связи 6. В таком состоянии доильный аппарат может оставаться до подхода оператора. При выполнении операций машинного додаивания и завершения процесса доения, когда поршень 21 перемещается вместе со штоком 20 в пневмоцилиндре 19 вверх или вниз, воздух через отверстие 23 и сапун, соединяющие нижнюю часть корпуса пневмоцилиндра 19 с атмосферой, свободно заполняет и освобождает пространство под поршнем 21, облегчая работу пневмоцилиндра 19. После выдаивания первой коровы оператор, не снимая ручку доильной аппаратуры с молочно-вакуумного крана, перевешивает подвеску 2 с доильным аппаратом, исполнительным механизмом 3 и улавливателем 4 доильных стаканов 5 на соседнюю корову. Каждая последующая пара коров выдаивается по принятой оператором схеме очередности. При доении животных непосредственно в стойлах оператор имеет возможность работать с четырьмя переносными манипуляторами. В обычных доильных установках после завершения молокоотдачи при недосмотре оператора начинается холостое доение: молока нет, а такты сосания продолжаются, иногда до выделения крови, что ведет к заболеванию маститами. Или, случается, при неспокойном поведении животного работающий аппарат спадает с вымени на пол, засасывая в молочную магистраль подстилку или навозную жижу. Все это сразу отражается на качестве молока и здоровье животных. В данном манипуляторе все это исключено. Благодаря конструкции подвески 2, выполненной в виде дуги, копирующей в той или иной степени поперечный профиль тела животного, и способу монтажа на ней исполнительного механизма 3 с доильным аппаратом и улавливателем 4 доильных стаканов 5, подвеска 2 при установке ее на круп животного в области пояснично-крестцовых выступов и впадин входит с ними в "зацепление" и способствует правильной самоустановке манипулятора на теле животного. В предложенном манипуляторе автомат управления 1 процессом доения может быть применен, в принципе, любого типа: поплавкового, струйного, мембранного и др. и в зависимости от своих технических характеристик и функциональных особенностей, а также типа доильных установок и способов доения (в молокопровод, в доильное ведро или молочную флягу с последующей подачей молока в молокопровод или без нее - при отсутствии молокопровода) может быть смонтирован в другом месте системы. В связи с этим может измениться и компоновка других узлов и деталей системы, например, пульсатора 9, соединяемого посредством магистрального вакуумного шланга 11 с вакуумпроводом 17 с одной стороны и шланга переменного вакуума 13 с распределителем коллектора 10 - с другой. Одним из преимуществ предложенного манипулятора является то, что в конструкции исполнительного механизма 3, выполненного в виде пневмоцилиндра 19, вертикально смонтированного на коллекторе 10 доильного аппарата между доильными стаканами 5, рабочим органом которого служит шток 20 поршня 21, оборудованный оголовком 24, выполненным в виде эллипсоида с горизонтально расположенной большой осью, размещенного в межсосковом пространстве вымени животного между головками сосковой резины доильных стаканов 5 и покрытого эластичным материалом с низкой теплопроводностью, например губчатой резиной, кожей, фетром и др., при выполнении операций машинного додаивания и завершения процесса доения указанный рабочий орган, активно воздействуя оголовком 24 штока 20 на межсосковую часть вымени животного и оттягивая вниз доильный аппарат, имитирует действие теленка при сосании молока у коровы, когда он, инстинктивно тыкаясь своим носом в межсосковое пространство вымени коровы, производит толкающие усилия и вольно или невольно осуществляет тем самым массаж вымени коровы, стимулируя рефлекс молокоотдачи и способствуя большей полноте выдаивания вымени животного. Разница в данном случае состоит лишь в том, что все эти операции выполняются рабочим органом исполнительного механизма 3 автоматически. Кроме того, рабочий орган исполнительного механизма 3 при его работе отторгает доильный аппарат от вымени непосредственно вниз, исключая пережатие или переламывание молочных протоков сосков вымени, что также положительно влияет на полноту выдаивания вымени коров. При этом следует отметить, что конструкция исполнительного механизма 3, предусматривающая контакт оголовка 24 штока 20 поршня 21 с выменем в межсосковом пространстве сразу после одевания доильного аппарата на вымя животного, препятствует сколько-нибудь значительному "наползанию" доильных стаканов на соски вымени и пережатию молочных протоков последних при доении животного, так как доильные стаканы 5, "наползая" на соски вымени животного при доении, поднимают своими короткими молочными и вакуумными шлангами коллектор 10 доильного аппарата (а, значит, и сам доильный аппарат) вверх, при этом вместе с коллектором 10 на столько же должен подняться вверх и вертикально смонтированный на коллекторе 10 пневмоцилиндр 19, однако оголовок 24 штока 20 пневмоцилиндра 19, упираясь все сильнее в межсосковое пространство вымени, ограничивает дальнейший подъем коллектора 10 и доильных стаканов 5 вверх, повышая тем самым интенсивность молокоотдачи и скорость выдаивания. Этому способствует и дополнительный вес доильного аппарата, увеличенный за счет веса исполнительного механизма 3. В результате автоматизации операций стимуляции рефлекса молокоотдачи и снятия доильного аппарата с вымени животного повышается производительность доильной установки. Кроме того, автоматизированная стимуляция рефлекса молокоотдачи гарантирует припуск молока при недостаточном проведении этой операции перед доением, а своевременное автоматическое снятие доильного аппарата значительно снижает возможность заболевания вымени животного. Предложенный манипулятор доения может применяться как в переносном варианте, так и в стационарном, а также передвижном для доения животных соответственно в стойлах, летних лагерях и на пастбищах, на всех типах доильных установок, на общественных и семейных фермах, в крестьянских и фермерских хозяйствах непосредственно в молокопровод, а при соответствующей компоновке - и в доильные ведра или молочные фляги. Применение предложенного устройства, автоматизирующего работу доильных аппаратов, позволит полностью устранить передержки доильного аппарата на вымени животного, обеспечить качественное выполнение технологических операций доения, резко снизить заболеваемость коров маститом, значительно улучшить условия работы и повысить производительность труда операторов. Источники информации 1. "Манипулятор доения универсальный МДУ-1" проспект ВНИПТИМЭСХ, г. Зерноград, 1993 г. 2. Патент Российской Федерации 2127972, кл. A 01 J 7/00, 1999.1 Формула изобретения1. Манипулятор доения, включающий автомат управления, исполнительный механизм, подвеску, выполненную в виде дуги с элементами копирования поперечного профиля тела животного, и улавливатель доильных стаканов, отличающийся тем, что исполнительный механизм выполнен в виде пневмоцилиндра, вертикально смонтированного на коллекторе доильного аппарата между доильными стаканами и снабженного в верхней и нижней частях его корпуса отверстиями, с помощью которых верхняя часть корпуса пневмоцилиндра сообщается с пневмодатчиком автомата управления, а нижняя - с атмосферой, причем верхний, свободный, конец штока поршня пневмоцилиндра оборудован оголовком, а доильный аппарат в исходном положении удерживается улавливателем доильных станков, закрепленным на исполнительном механизме и соединенным с дугообразной подвеской посредством гибкой связи с устройством для регулирования ее установки по высоте, при этом улавливатель доильных стаканов выполнен в виде охватывающего корпус пневмоцилиндра исполнительного механизма хомутика и жестко прикрепленных к нему саморегулируемых телескопических связей, крестообразно расположенных вокруг пневмоцилиндра и снабженных разрезными кольцами для свободного размещения в них доильных стаканов. 2. Манипулятор доения по п.1, отличающийся тем, что устройство для регулирования установки по высоте гибкой связи между улавливателем доильных стаканов и дугообразной подвеской состоит из выполненного прямолинейным конца дуги подвески и расположенной на нем с возможностью перемещения по нему втулки, снабженной фиксатором ее хода, выполненным в виде стопорного винта с поворотной ручкой, при этом один конец гибкой связи, соединяющей улавливатель доильных стаканов с дугообразной подвеской, прикреплен к охватывающему корпус пневмоцилиндра исполнительного механизма хомутику, а другой - к расположенной на прямолинейном конце дуги подвески втулке устройства для регулирования установки данной гибкой связи по высоте. 3. Манипулятор доения по одному из п.1 или 2, отличающийся тем, что саморегулируемые телескопические связи улавливателя доильных стаканов включают неподвижную трубку и расположенный в ней с возможностью перемещения палец, причем один конец трубки жестко прикреплен к охватывающему корпус пневмоцилиндра исполнительного механизма хомутику, а другой - выполнен в виде горловины с меньшим внутренним диаметром, при этом один конец пальца, находящийся в трубке, снабжен головкой, диаметр которой превышает внутренний диаметр горловины трубки, а другой, вне трубки, - разрезным кольцом с размещенным в нем с возможностью перемещения доильным стаканом, причем величина зазора в месте разреза кольца превышает толщину бокового вакуум-штуцера доильного стакана. 4. Манипулятор доения по одному из пп.1 или 3, отличающийся тем, что оголовок штока поршня пневмоцилиндра выполнен в виде эллипсоида с горизонтально расположенной большой осью, размещенного в межсосковом пространстве вымени животного, между головками сосковой резины на доильных стаканах. 5. Манипулятор доения по п.1 или 4, отличающийся тем, что эллипсоидный оголовок штока поршня покрыт эластичным материалом с низкой теплопроводностью, например, губчатой резиной.MM4A Досрочное прекращение действия патента Российской Федерации на изобретение из-за неуплаты в установленный срок пошлины за поддержание патента в силе Дата прекращения действия патента: 26.04.2002 Номер и год публикации бюллетеня: 32-2003 Извещение опубликовано: 20.11.2003 Популярные патенты: 2270554 Сепарирующее устройство зерноуборочного комбайна (варианты) ... для сепарирования зерна из убранной массы, содержащее ротор и частично окружающий его с зазором сепарирующий короб, который снабжен по меньшей мере двумя дугообразными рамными элементами, соединенными между собой с помощью проходящих параллельно оси ротора профилей, которые снабжены образующими решето стойками, проходящими поперечно оси ротора на расстоянии друг от друга, отличающееся тем, что образующие решето стойки ступенчато изогнуты и выполнены в виде единых элементов в направлении вращения. 2. Устройство по п.1, отличающееся тем, что указанные стойки изогнуты с образованием нескольких ступеней.3. Устройство по п.1 или 2, отличающееся тем, что по меньшей мере два ... 2477599 Жатка зерноуборочного комбайна ... пружинных пальцев, выполненных в виде проволочного торсиона с загнутыми под прямым углом концами, позволяет исключить проникновение стеблей хлебной массы внутрь транспортера через пространство между гребенками, а также дополнительно воздействовать на хлебную массу при повороте транспортера в сторону подающего битера.Унификация гребенок транспортера, отводящего срезанную хлебную массу и гребенок транспортера наклонной камеры, сокращает номенклатуру деталей и создает удобства в эксплуатации жатки зерноуборочного комбайна.Наличие на каждой граблине эксцентрикового мотовила двух параллельных труб, жестко связанных между собой, на которых закреплены пружинные пальцы, позволяет ... 2423807 Культиватор (варианты) и фреза для него ... работы и управляемость культиватора.Таким образом, наклонное и ориентированное в направлении движения культиватора, в частности вперед, расположение фрез и соответственно их осей и выполнение их пальцев в виде направленной в направлении вращения фрезы винтовой линии исключает присущие известным из уровня техники культиваторам проблемы выскакивания и зарывания в почву, нестабильности обработки почвы, а также значительного веса и/или плохой управляемости. Стабильность и управляемость также повышается за счет противоположного вращения, по меньшей мере, двух из упомянутых фрез. Подобное вращение фрез компенсирует боковые усилия, создаваемые каждой фрезой в процессе ее вращения, и тем ... 2010519 Способ биологической борьбы с вредителями растений ... их обитания и одновременно вводят в рацион запахово-вкусовые вещества в течение времени периода кормления птенцов. 2. Способ по п. 1, отличающийся тем, что уменьшение количества естественного корма достигается путем изоляции птиц в зоне их гнездовий за счет создания пространственно-замкнутого объема. 3. Способ по пп. 1 и 2, отличающийся тем, что пространственно-замкнутый объем создается путем установки на шестах сетчатых покрытий. 4. Способ по пп. 1 - 3, отличающийся тем, что, с целью увеличения количества птиц, в замкнутом объеме устанавливают группу искусственных гнездовий. MM4A Досрочное прекращение действия патента Российской Федерации на изобретение из-за неуплаты в ... 2389173 Способ выращивания земляники садовой ... Проведение учетов осуществлялось по методике, изложенной в монографии (Программа и методика сортоизучения плодовых, ягодных и орехоплодных культур. Под ред. акад. РАСХН Седова Е.Н., д. с.-х. н. Огольцовой Т.П., Орел: изд-во ВНИИСПК, 1999. - 608 с.) и ГОСТ 6828-89.Результаты проведенных опытов систематизированы в табл.1. Таблица 1 Урожайность земляники в зависимости от факторов опыта Число импульсов магнитной индукции, "N" Частота импульсов магнитной индукции, Гц Среднее значение урожайности земляники садовой, ц/га Вектор магнитной индукции направлен вертикально вверх Вектор магнитной индукции направлен вертикально вниз 32 8,038,0 29,664 8,0 42,930,6 32 ... |
Еще из этого раздела: 2274986 Способ посева семян трав и кустарников для создания пастбищ на опустыненных землях и почвообрабатывающее орудие для его осуществления 2090040 Машина для возделывания корнеклубневых культур 2108700 Способ оценки горных сенокосов и пастбищ 2473366 Вещество, обладающее антимикробным действием 2407280 Устройство и способ для осушения воздуха в теплице и теплица 2496298 Узел крепления пальцев подборщика 2140738 Производные n-арилгидразина, способ их получения, способ подавления насекомых и композиция для подавления насекомых 2121787 Устройство для регулирования температуры воздуха в теплице 2140137 Универсальный способ получения проросших семян сельскохозяйственных культур 2229783 Способ посева семян трав и кустарников для создания пастбищ |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||