Способ управления групповым вождением машинПатент на изобретение №: 2172085 Автор: Суздальцев А.И., Загородних А.Н., Бочаров В.С., Загородних Н.А. Патентообладатель: Орловский государственный технический университет Дата публикации: 20 Августа, 2001 Начало действия патента: 12 Ноября, 1999 Адрес для переписки: 302020, г.Орел, Наугорское ш., 29, Орловский государственный технический университет Изображения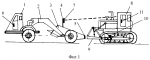 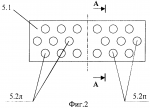 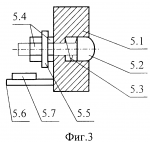 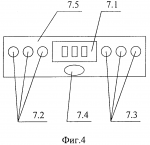 Способ заключается в том, что ведущая машина излучает сигнал, а ведомая машина принимает сигнал. Ведущая машина излучает постоянный визуальный сигнал о скорости и переменный визуальный сигнал о положении ведомой машины относительно линии симметрии ведущей машины через соответствующие элементы индикации, которые располагают на задней стенке ковша ведущей машины. Ведомая машина по визуальному сигналу о скорости ведущей машины изменяет свою скорость, а по визуальному и звуковому переменному сигналу ведущей машины ориентирует свое движение в направлении, перпендикулярном основному движению ведущей машины. Ведущая машина переменный визуальный и звуковой сигналы формирует путем логической обработки сигналов с датчиков соприкосновения, которые располагают в теле ее буфера, от момента начального соприкосновения ведомой машины с буфером ведущей машины до их полного соприкосновения. Упрощается процесс управления при сближении и стыковке машин, расширяются функциональные возможности управления в полевых условиях и сокращается время стыковки. 2 з.п.ф-лы, 7 ил. Способ управления групповым вождением машин относится к области автоматизации процессов совместной работы движущихся друг за другом машин и может быть использован для ориентации движения двух транспортных средств, в частности при совместной работе скрепера и толкача. Известны способы для группового управления вождением самоходных сельскохозяйственных машин, например описанный в SU А.С. N 743612 от 30.06.80, включающий ведущую и ведомые машины, заключающийся в том, что ведущая машина излучает электромагнитные волны через радиопередатчик и излучатель, а ведомая принимает их через антенны и приемники, преобразовывает в соотношение амплитуд, обрабатывает, формирует сигналы коррекции, преобразовывает их в текущие координаты исполнительных органов. Излучение и прием электромагнитных волн осуществляют в двух взаимно перпендикулярных направлениях с помощью вибраторов. Недостатками описанного способа являются: наличие "мертвых" зон, не возможность вхождения машин в синхронизм в исходном положении машин, сложность системы управления и сложность ее обслуживания в реальных по левых условиях. Более надежным в управлении известен способ, реализация которого описана в SU А.С. N 835319 и который заключается в том, что ведущая и ведомая машины излучают сигналы в виде электромагнитных волн через радиопередатчик и излучатель, а принимают через антенны приемников с вибраторами, преобразовывают сигналы в соотношение амплитуд, обрабатывают, дополнительно интегрируют, формируют сигналы коррекции и преобразовывают их в текущие координаты исполнительных органов. Этот способ принят за прототип. Он имеет следующие недостатки: 1. реализация данного способа включает множество сложных операций, для выполнения которых требуются радиоприемники и радиопередатчики, смесители, гетеродин, фильтры, фазоизмерительные и сравнивающие устройства, интеграторы, коммутаторы и вычислители, что делает данный способ достаточно сложным и дорогим. 2. система, описанная в данном способе, осуществляет управление только скоростью движения группы самоходных машин и не учитывает их поперечное движение. Кроме того, способ не позволяет осуществлять синхронное сближение и стыковку, т.е. его функциональные возможности управления ограничены. Задача, решаемая изобретением, - упрощение процесса управления при сближении и стыковке машин, расширение функциональных возможностей управления в полевых условиях и сокращение времени стыковки. Это достигается тем, что в способе управления групповым вождением машин, заключающемся в том, что ведущая машина излучает сигнал, а ведомая принимает сигнал, ведущая машина излучает постоянный визуальный сигнал о скорости и переменный визуальный и звуковой сигнал о положении ведомой машины относительно линии симметрии ведущей машины через соответствующие элементы индикации, которые располагают на задней стенке ковша ведущей машины, при этом ведомая машина по визуальному сигналу о скорости ведущей машины изменяет свою скорость, а по переменному визуальному и звуковому сигналу ведущей машины ориентирует свое движение в направлении, перпендикулярном основному движению ведущей машины, причем ведущая машина переменный визуальный и звуковой сигналы формирует путем логической обработки сигналов с датчиков соприкосновения, которые располагают в теле его буфера, от момента начального соприкосновения ведомой машины с буфером ведущей машины до их полного соприкосновения. Постоянный визуальный сигнал о скорости ведущей машины формируют путем заполнения нечетных промежутков между импульсами, снимаемыми с датчика оборотов тросика спидометра, импульсами высокой частоты, их подсчета и преобразования в значение скорости в четных промежутках между первыми упомянутыми импульсами, запоминания и отображения на соответствующих индикаторах, при этом преобразование подсчитанного количества импульсов высокой частоты в значение скорости осуществляют в соответствии с выражением   где V - скорость в км/ч, n - количество подсчитанных импульсов высокой частоты с периодом T3, l0 - цена в линейных размерах одного импульса с датчика оборотов тросика спидометра, k1 и k2 - соответственно коэффициенты перевода линейных размеров l0 в километры и временного интервала T3 в часы. Логическую обработку сигналов с датчиков соприкосновения осуществляют путем оценки наличия сигналов от каждой группы рядом стоящих датчиков соприкосновения и включения соответствующего индикатора на пульсирующее мигание, а при наличии сигналов от всех групп датчиков соприкосновения переводят индикаторы на постоянное свечение и формируют прерывистый звуковой сигнал на заданное время, после истечения которого звуковой сигнал снимают. Реализация способа управления групповым вождением машин рассматривается ниже на примере работы системы управления групповым вождением машин скрепер - толкач и поясняется чертежами, приведенными на фиг. 1-7, при этом скрепер выступает в качестве ведущей машины, а толкач - в качестве ведомой машины. На фиг. 1 - приведена общая схема системы скрепер - толкач, включающая скрепер 1, раму 2, ковш 3, заднюю стенку ковша 4, буфер ковша 5, устройство управления 6, панель управления 7, толкач (бульдозер) 8, толкающие брусья с отвалом 9. датчик движения толкача 10, указатель скорости толкача 11. На фиг. 2 показан вид сзади на буфер ковша скрепера с датчиками соприкосновения (5.2л - левая группа, 5.2п - правая группа). На фиг. 3 приведено сечение по А-А фиг. 2, где показана конструкция датчика соприкосновения и его крепление в теле буфера 5.1, где: 5.2 - болт, 5.3 - пружина, 5.4 - гайка, 5.5 - магнитная шайба, 5.6 - кронштейн, 5.7 - магнитоуправляемый контакт (геркон). На фиг. 4 показан основной вид панели индикации 7 с цифровыми индикаторами скорости скрепера 7.1, с группой левых 7.2 и правых 7.3. индикаторов положения толкача, со звуковым излучателем 7.4 (динамик), установленных на панели 7.5. На фиг. 5 приведена блок-схема системы управления ориентировки движения совместно работающих скрепера и толкача (бульдозера), где обозначены: 5.2л, 5.2п - левая и правая группы датчиков соприкосновения, 6.1 - датчик оборотов тросика спидометра скрепера, 6.2 - блок определения скорости скрепера, 6.3; 6.4 - блоки формирования переменного визуального сигнала о положении толкача относительно линии симметрии скрепера, 6.5 - блок формирования переменного звукового сигнала, 10 - датчик движения толкача, 11 - указатель скорости толкача с преобразователем движения в скорость 11.1 и индикатором скорости 11.2. На фиг. 6 - показана функциональная схема логической обработки сигналов с датчиков соприкосновения и формирования переменного визуального и звукового сигнала. Блок 6.3 формирования переменного визуального сигнала от левой группы датчиков соприкосновения содержит три схемы совпадения на три входа, подключенных к трем группам по три датчика соприкосновения 5.2л, и три схемы совпадения на два входа, первыми входами связанными с входами соответствующих схем совпадения, вторыми - с управляющим входом блока, а выходами через усилители с левой группой индикаторов положения толкача. Аналогично построен блок 6.4 формирования переменного визуального сигнала от правой группы датчиков соприкосновения. Блок 6.5 формирования переменного звукового сигнала содержит шестивходовую схему И-НЕ, входами связанную с выходами блоков 6.3 и 6.4, двухвходовую схему И-НЕ, входами связанную с выходами предыдущей схемой И-НЕ и первым выходом f1 генератора импульсов G, а выходом с управляющим входом блоков 6.3 и 6.4. Блок 6.5 также содержит триггер, связанный первым входом через формирователь F, а вторым входом через линию задержки ЛЗ и формирователь F с выходом упомянутой шестивходовой схемы И-НЕ, причем выход триггера через трехвходовую схему И и усилитель У связан со звукоизлучателем 7.4, а второй и третий входы трехвходовой схемы И подключены соответственно к первому и второму выходам генератора импульсов G, третий выход которого f3 связан с блоком 6.2. На фиг. 7 приведена функциональная схема блока определения скорости скрепера, где обозначены: Тсч - одноразрядный двоичный счетчик, схема совпадения &, делитель Д, двоичный счетчик ST, преобразователь кода скорости в численное значение скорости с запоминанием P, одновибраторы F1 и F2, f0(T0) - частота (период) импульсов с датчика оборотов тросика спидометра, f3(T3) - частота (период) импульсов высокой частоты, n - количество импульсов высокой частоты, прошедшее за нечетный промежуток между импульсами с частотой f0. Преобразователь кода P (к/n) в численное значение скорости построен в виде постоянного запоминающего устройства (ПЗУ), на выходе которого подключен регистр, адресными входами ПЗУ являются входы счетчика ST, а сигналом чтения - сигнал с одновибратора F1. После запоминания численного значения скорости по коду со счетчика ST последний гасится сигналом с одновибратора F2. Управление вождением машин на примере скрепера с толкачом предлагаемым способом осуществляется следующим образом. Скрепер 1 (фиг. 1), врезаясь в грунт ковшом 3, излучает постоянный визуальный сигнал о скорости с индикаторов 7.1 индикаторной панели 7. Водитель толкача 8 воспринимает информацию о скорости скрепера, снижает свою скорость, контролируя ее по указателю скорости 11. При начальном соприкосновении отвала 9 с буфером ковша 5 скрепера срабатывает одна или несколько групп, например, левых датчиков соприкосновения 5.2л, которые, преодолевая сопротивление пружины 5.3 (фиг. 2,3), перемещают магнитную шайбу в осевом направлении, отчего замыкается магнитоуправляемый контакт 5.7 соответствующего датчика, срабатывает одна или несколько трехвходовых схем И в блоке 6.3 и соответственно одна или несколько двухвходовых схем. И в этом блоке и соответствующие индикаторные лампы блока 7.2 переходят в режим пульсирующего мигания, управляемые сигналом f1 на входе блока 6.3, т.е. скрепер излучает переменный визуальный сигнал о положении толкача относительно линии симметрии ведущей машины (скрепера). По миганию индикаторных ламп водитель толкача ориентирует его движение в направлении, перпендикулярном основному движению, до момента полного соприкосновения. Этот момент фиксируется шестивходовой схемой И-НЕ в блоке 6.5 (фиг. 6), и через двухвходовую схему И-НЕ на управляющий вход блоков 6.3 и 6.4 поступает постоянный сигнал, отчего индикаторные лампы переходят на постоянное свечение. Одновременно через формирователь F срабатывает триггер Т (фиг. 6), отчего открывается трехвходовая схема И-НЕ и на звуковой излучатель поступает смесь двух частот с генератора импульса G (f1 и f2), что вызывает прерывистые звуковые сигналы с излучателя 7.4. Через время, определяемое линией задержки ЛЗ, триггер Т устанавливается в первоначальное положение и работа излучателя 7.4 прекращается. Ведущая машина и ведомая машина начинают работать при полном соприкосновении, при постоянном контроле скорости скрепера по ее визуальной индикации на индикаторном табло. Постоянный визуальный сигнал о скорости скрепера формируют путем заполнения нечетных промежутков между импульсами (фиг. 7), снимаемых с датчика оборотов тросика спидометра G1, импульсами высокой частоты f3(T3), их подсчета (элементы Tсч, схема И, делитель Д, счетчик ST) и преобразования в значение скорости в четных промежутках между упомянутыми импульсами, запоминания [элементы F1, F2, P(к/n)] и отображения на соответствующих индикаторах. Преобразование подсчитанного количества импульсов высокой частоты в значение скорости осуществляют в соответствии с выражением где V - скорость в км/ч, n - количество подсчитанных импульсов высокой частоты с периодом T3, l0 - цена в линейных размерах одного импульса с датчика оборотов тросика спидометра, k1 и k2 - соответственно коэффициенты перевода линейных размеров l0 в километры и временного интервала T3 в часы. Логическую обработку сигналов с датчиков соприкосновения осуществляют путем оценки наличия сигналов от каждой группы рядом стоящих датчиков соприкосновения и включения соответствующего индикатора на пульсирующее мигание, а при наличии сигналов от всех групп датчиков соприкосновения переводят индикаторы на постоянное свечение и формируют прерывистый звуковой сигнал на заданное время, после истечения которого звуковой сигнал снимают. Реализация способа управления групповым вождением машин рассматривается ниже на примере работы системы управления групповым вождением машин скрепер - толкач и поясняется чертежами, приведенными на фиг. 1-7, при этом скрепер выступает в качестве ведущей машины, а толкач - в качестве ведомой машины. На фиг. 1 - приведена общая схема системы скрепер - толкач, включающая скрепер 1, раму 2, ковш 3, заднюю стенку ковша 4, буфер ковша 5, устройство управления 6, панель управления 7, толкач (бульдозер) 8, толкающие брусья с отвалом 9. датчик движения толкача 10, указатель скорости толкача 11. На фиг. 2 показан вид сзади на буфер ковша скрепера с датчиками соприкосновения (5.2л - левая группа, 5.2п - правая группа). На фиг. 3 приведено сечение по А-А фиг. 2, где показана конструкция датчика соприкосновения и его крепление в теле буфера 5.1, где: 5.2 - болт, 5.3 - пружина, 5.4 - гайка, 5.5 - магнитная шайба, 5.6 - кронштейн, 5.7 - магнитоуправляемый контакт (геркон). На фиг. 4 показан основной вид панели индикации 7 с цифровыми индикаторами скорости скрепера 7.1, с группой левых 7.2 и правых 7.3. индикаторов положения толкача, со звуковым излучателем 7.4 (динамик), установленных на панели 7.5. На фиг. 5 приведена блок-схема системы управления ориентировки движения совместно работающих скрепера и толкача (бульдозера), где обозначены: 5.2л, 5.2п - левая и правая группы датчиков соприкосновения, 6.1 - датчик оборотов тросика спидометра скрепера, 6.2 - блок определения скорости скрепера, 6.3; 6.4 - блоки формирования переменного визуального сигнала о положении толкача относительно линии симметрии скрепера, 6.5 - блок формирования переменного звукового сигнала, 10 - датчик движения толкача, 11 - указатель скорости толкача с преобразователем движения в скорость 11.1 и индикатором скорости 11.2. На фиг. 6 - показана функциональная схема логической обработки сигналов с датчиков соприкосновения и формирования переменного визуального и звукового сигнала. Блок 6.3 формирования переменного визуального сигнала от левой группы датчиков соприкосновения содержит три схемы совпадения на три входа, подключенных к трем группам по три датчика соприкосновения 5.2л, и три схемы совпадения на два входа, первыми входами связанными с входами соответствующих схем совпадения, вторыми - с управляющим входом блока, а выходами через усилители с левой группой индикаторов положения толкача. Аналогично построен блок 6.4 формирования переменного визуального сигнала от правой группы датчиков соприкосновения. Блок 6.5 формирования переменного звукового сигнала содержит шестивходовую схему И-НЕ, входами связанную с выходами блоков 6.3 и 6.4, двухвходовую схему И-НЕ, входами связанную с выходами предыдущей схемой И-НЕ и первым выходом f1 генератора импульсов G, а выходом с управляющим входом блоков 6.3 и 6.4. Блок 6.5 также содержит триггер, связанный первым входом через формирователь F, а вторым входом через линию задержки ЛЗ и формирователь F с выходом упомянутой шестивходовой схемы И-НЕ, причем выход триггера через трехвходовую схему И и усилитель У связан со звукоизлучателем 7.4, а второй и третий входы трехвходовой схемы И подключены соответственно к первому и второму выходам генератора импульсов G, третий выход которого f3 связан с блоком 6.2. На фиг. 7 приведена функциональная схема блока определения скорости скрепера, где обозначены: Тсч - одноразрядный двоичный счетчик, схема совпадения &, делитель Д, двоичный счетчик ST, преобразователь кода скорости в численное значение скорости с запоминанием P, одновибраторы F1 и F2, f0(T0) - частота (период) импульсов с датчика оборотов тросика спидометра, f3(T3) - частота (период) импульсов высокой частоты, n - количество импульсов высокой частоты, прошедшее за нечетный промежуток между импульсами с частотой f0. Преобразователь кода P (к/n) в численное значение скорости построен в виде постоянного запоминающего устройства (ПЗУ), на выходе которого подключен регистр, адресными входами ПЗУ являются входы счетчика ST, а сигналом чтения - сигнал с одновибратора F1. После запоминания численного значения скорости по коду со счетчика ST последний гасится сигналом с одновибратора F2. Управление вождением машин на примере скрепера с толкачом предлагаемым способом осуществляется следующим образом. Скрепер 1 (фиг. 1), врезаясь в грунт ковшом 3, излучает постоянный визуальный сигнал о скорости с индикаторов 7.1 индикаторной панели 7. Водитель толкача 8 воспринимает информацию о скорости скрепера, снижает свою скорость, контролируя ее по указателю скорости 11. При начальном соприкосновении отвала 9 с буфером ковша 5 скрепера срабатывает одна или несколько групп, например, левых датчиков соприкосновения 5.2л, которые, преодолевая сопротивление пружины 5.3 (фиг. 2,3), перемещают магнитную шайбу в осевом направлении, отчего замыкается магнитоуправляемый контакт 5.7 соответствующего датчика, срабатывает одна или несколько трехвходовых схем И в блоке 6.3 и соответственно одна или несколько двухвходовых схем. И в этом блоке и соответствующие индикаторные лампы блока 7.2 переходят в режим пульсирующего мигания, управляемые сигналом f1 на входе блока 6.3, т.е. скрепер излучает переменный визуальный сигнал о положении толкача относительно линии симметрии ведущей машины (скрепера). По миганию индикаторных ламп водитель толкача ориентирует его движение в направлении, перпендикулярном основному движению, до момента полного соприкосновения. Этот момент фиксируется шестивходовой схемой И-НЕ в блоке 6.5 (фиг. 6), и через двухвходовую схему И-НЕ на управляющий вход блоков 6.3 и 6.4 поступает постоянный сигнал, отчего индикаторные лампы переходят на постоянное свечение. Одновременно через формирователь F срабатывает триггер Т (фиг. 6), отчего открывается трехвходовая схема И-НЕ и на звуковой излучатель поступает смесь двух частот с генератора импульса G (f1 и f2), что вызывает прерывистые звуковые сигналы с излучателя 7.4. Через время, определяемое линией задержки ЛЗ, триггер Т устанавливается в первоначальное положение и работа излучателя 7.4 прекращается. Ведущая машина и ведомая машина начинают работать при полном соприкосновении, при постоянном контроле скорости скрепера по ее визуальной индикации на индикаторном табло. Постоянный визуальный сигнал о скорости скрепера формируют путем заполнения нечетных промежутков между импульсами (фиг. 7), снимаемых с датчика оборотов тросика спидометра G1, импульсами высокой частоты f3(T3), их подсчета (элементы Tсч, схема И, делитель Д, счетчик ST) и преобразования в значение скорости в четных промежутках между упомянутыми импульсами, запоминания [элементы F1, F2, P(к/n)] и отображения на соответствующих индикаторах. Преобразование подсчитанного количества импульсов высокой частоты в значение скорости осуществляют в соответствии с выражением   где V - скорость в км/ч, n - количество подсчитанных импульсов высокой частоты с периодом T3, l0 - цена в линейных размерах одного импульса с датчика оборотов тросика спидометра, k1 и k2 - соответственно коэффициенты перевода линейных размеров l0 в километры и временного интервала T3 в часы. В каждом нечетном интервале между импульсами f0 в счетчике ST (фиг. 7) записывают код скорости (величина n/k), а численное значение скорости равно k/n. Поэтому в преобразователе P(k/n) осуществляется обратное преобразование кода n/k путем обращения к таблице, записанной в постоянном запоминающем устройстве ПЗУ, где каждому значению n/k есть соответствующее значение k/n. За счет того, что ведущая машина дополнительно излучает переменный визуальный и звуковой сигналы о положении ведомой машины относительно линии симметрии ведущей машины через соответствующие элементы индикации, а ведомая машина ориентирует по дополнительно полученным сигналам свое движение в направлении, перпендикулярном основному движению ведущей машины до полного их соприкосновения, сокращается время стыковки, упрощается процесс управления вождением машин и расширяются функциональные возможности управления в полевых условиях. где V - скорость в км/ч, n - количество подсчитанных импульсов высокой частоты с периодом T3, l0 - цена в линейных размерах одного импульса с датчика оборотов тросика спидометра, k1 и k2 - соответственно коэффициенты перевода линейных размеров l0 в километры и временного интервала T3 в часы. В каждом нечетном интервале между импульсами f0 в счетчике ST (фиг. 7) записывают код скорости (величина n/k), а численное значение скорости равно k/n. Поэтому в преобразователе P(k/n) осуществляется обратное преобразование кода n/k путем обращения к таблице, записанной в постоянном запоминающем устройстве ПЗУ, где каждому значению n/k есть соответствующее значение k/n. За счет того, что ведущая машина дополнительно излучает переменный визуальный и звуковой сигналы о положении ведомой машины относительно линии симметрии ведущей машины через соответствующие элементы индикации, а ведомая машина ориентирует по дополнительно полученным сигналам свое движение в направлении, перпендикулярном основному движению ведущей машины до полного их соприкосновения, сокращается время стыковки, упрощается процесс управления вождением машин и расширяются функциональные возможности управления в полевых условиях.
Формула изобретения1. Способ управления групповым вождением машин, заключающийся в том, что ведущая машина излучает сигнал, а ведомая машина принимает сигнал, отличающийся тем, что ведущая машина излучает постоянный визуальный сигнал о скорости и переменный визуальный сигнал о положении ведомой машины относительно линии симметрии ведущей машины через соответствующие элементы индикации, которые располагают на задней стенке ковша ведущей машины, при этом ведомая машина по визуальному сигналу о скорости ведущей машины изменяет свою скорость, а по визуальному и звуковому переменному сигналу ведущей машины ориентирует свое движение в направлении, перпендикулярном основному движению ведущей машины, причем ведущая машина переменный визуальный и звуковой сигналы формирует путем логической обработки сигналов с датчиков соприкосновения, которые располагают в теле ее буфера, от момента начального соприкосновения ведомой машины с буфером ведущей машины до их полного соприкосновения. 2. Способ по п.1, отличающийся тем, что постоянный визуальный сигнал о скорости ведущей машины формируют путем заполнения нечетных промежутков между импульсами, снимаемыми с датчика оборотов тросика спидометра, импульсами высокой частоты, их подсчета и преобразования в значение скорости в четных промежутках между упомянутыми импульсами, запоминания и отображения на соответствующих индикаторах, при этом преобразование подсчитанного количества импульсов высокой частоты в значение скорости осуществляют в соответствии с выражением где где  где V - скорость, км/ч; n - количество подсчитанных импульсов высокой частоты с периодом T3; l0 - цена в линейных размерах одного импульса с датчика оборотов тросика спидометра; k1 и k2 - соответственно коэффициенты перевода линейных размеров l0 в километры и временного интервала T3 в часы. 3. Способ по п.1, отличающийся тем, что логическую обработку сигналов с датчиков соприкосновения осуществляют путем оценки наличия сигналов от каждой группы рядом стоящих датчиков соприкосновения и включения соответствующего индикатора на пульсирующее мигание, а при наличии сигнала от всех групп датчиков соприкосновения переводят соответствующие индикаторы на постоянное свечение и формируют прерывистый звуковой сигнал на заданное время, после истечения которого звуковой сигнал снимают. где V - скорость, км/ч; n - количество подсчитанных импульсов высокой частоты с периодом T3; l0 - цена в линейных размерах одного импульса с датчика оборотов тросика спидометра; k1 и k2 - соответственно коэффициенты перевода линейных размеров l0 в километры и временного интервала T3 в часы. 3. Способ по п.1, отличающийся тем, что логическую обработку сигналов с датчиков соприкосновения осуществляют путем оценки наличия сигналов от каждой группы рядом стоящих датчиков соприкосновения и включения соответствующего индикатора на пульсирующее мигание, а при наличии сигнала от всех групп датчиков соприкосновения переводят соответствующие индикаторы на постоянное свечение и формируют прерывистый звуковой сигнал на заданное время, после истечения которого звуковой сигнал снимают.
MM4A Досрочное прекращение действия патента Российской Федерации на изобретение из-за неуплаты в установленный срок пошлины за поддержание патента в силе Дата прекращения действия патента: 12.11.2001 Номер и год публикации бюллетеня: 19-2003 Извещение опубликовано: 10.07.2003 Популярные патенты: 2437864 Способ микробиологической переработки птичьего помета ... Candida utilis Y-2441 в равных соотношениях и в количестве 1·108-1·10 9 клеток в 1 мл на 1 т птичьего помета.Таким образом, заявляемый способ позволяет получить более дешевое высокоэффективное удобрение путем снижения расходов на его переработку за счет упрощения технологического процесса и уменьшения расхода вносимого консорциума штаммов.Продукты жизнедеятельности эффективных микроорганизмов (ЭМ) были использованы для создания различных биопрепаратов, направленных на быструю, эффективную переработку органических отходов в качественное органическое удобрение; для смыва нечистот, опрыскивания оборудования и помещений стойлового содержания сельскохозяйственных животных и ... 2141182 Культиватор ... механического уничтожения сорняков. Влажность почвы в верхнем ее слое не оказывает существенного влияния на выполнение технологического процесса - механического подавления сорной растительности. При демонтаже сменных секций 7-11 рабочих органов с катками 25 и барабанами 26 с рамы 1, культиватор можно использовать со стрельчатыми лапами шириной захвата 270 и 330 мм как паровой культиватор для обработки незасоренных полей. Изложенные сведения свидетельствуют о возможности выполнения заявленного изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ Культиватор, содержащий раму с установленными на ней секциями, каждая из которых образована последовательно расположенными рабочими органами, оси ... 2177226 Способ защиты растений от болезней, регулирования их роста и защитно-стимулирующий комплекс для его осуществления ... "Полиазофос-К" из расчета 0,25 кг/т, оксигумат - 0,2 л/т и другие вещества, например янтарную кислоту 0,00002 кг/т, фунгицид ТЕКТО из расчета 0,09-0,12 кг/т и т.д. В этом случае соотношение оксигумата и защитно-стимулирующего комплекса будет близким к 1:1,7-1,85. После введения всех компонентов защитно-стимулирующего комплекса, включая "Полиазофос-К", бак оборудования ОПС-1АК полностью заполняют водой при постоянном перемешивании рабочей жидкости и производят нанесение рабочей жидкости на поверхность семенных клубной с нормой расхода 1-2 л/т. Защитно-стимулирующий комплекс "Полиазофос-К" используют в виде пасты или измельченных и смешанных твердых компонентов в ... 2449809 Дезинфицирующее средство ... к области дезинфекции и может быть использовано в качестве антисептического и дезинфицирующего средства в медицине, ветеринарии, микробиологической, пищевой и других отраслях промышленности.Известно дезинфицирующее средство на основе смеси перекиси водорода и четвертичного аммониевого соединения [А.С. СССР N 1253015, МПК A61L 2/16, 1984 г.]. Но данное средство обладает сравнительно низкой бактерицидной и фунгицидной активностью. Кроме того, имеет малый срок хранения. Известно дезинфицирующее средство под названием "Грилен" -жидкость, содержит 9-25 мас.% пероксида водорода и 18-25 мас.% N-алканоиламинопропилдиметилбензиламмоний хлорида (Перечень новых дез. средств, ... 2432394 Ингибирование образования биогенного сульфида посредством комбинации биоцида и метаболического ингибитора ... сульфидов во многих жидкостях является следствием восстановления сульфатов в сульфиды восстанавливающими сульфат бактериями (SRB). SRB обычно обнаруживаются в воде, связанной с устройствами для продукции нефти, и их можно обнаружить по существу при всех промышленных водных процессах, включая, например, устройства водного охлаждения, устройства изготовления пульпы и бумаги, химическое производство и нефтепереработку.Требования к активности и росту SRB включают по существу анаэробную водную среду, содержащую соответствующие питательные вещества, донор электронов и акцептор электронов. Типичный акцептор электронов представляет собой сульфат, который при восстановлении продуцирует ... |
Еще из этого раздела: 2123784 Сетное каскадное устройство для промысла поверхностных объектов лова 2239993 Устройство для комбинированного охлаждения сельскохозяйственной продукции естественным и искусственным холодом 2108700 Способ оценки горных сенокосов и пастбищ 2485762 Ракета для активного воздействия на облака 2254705 Способ уплотнения и герметизации консервируемых кормов в рулонах 2210910 Способ обработки растений и используемая в нём композиция для защиты растений 2421965 Способ возделывания зерновых колосовых культур 2228588 Копатель корнеклубнеплодов 2160981 Способ создания плантаций солодки голой на обесструктуренных почвах в орошаемом земледелии 2086081 Рабочий орган культиватора |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||