Способ уборки плодов и ягод и устройство для его осуществленияПатент на изобретение №: 2104631 Автор: Гаджимурадов Исин Мевлютович Патентообладатель: Гаджимурадов Исин Мевлютович Дата публикации: 20 Февраля, 1998 Адрес для переписки: подача заявки12.04.1993 публикация патента20.02.1998 Изображения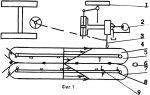 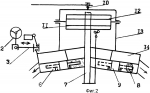 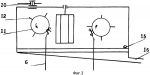 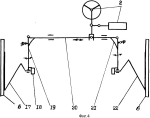 Способ уборки плодов и ягод и устройство для его осуществления предназначены для повышения уровня адаптивного управления и роботизации технологий и техники. В способе уборки плодов и ягод усилие для перемещения улавливателя назад и в сторону создают от его взаимодействия с растениями с возможностью копирования улавливателем рядка растений и формирования траектории движения агрегата. В устройстве механизм поворота соединен с улавливателем плодов и ягод, который может быть выполнен в виде упругогибких ножей. 2 с. и 3 з.п. ф-лы, 5 ил. , , , , ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУИзобретение относится к способу уборки плодов и ягод преимущественно рядовой посадки и устройству для его осуществления. Известен способ отделения плодов и ягод от растений, улавливания и перемещения и устройство для его осуществления. Недостатками известного способа и устройства являются трудности улавливания, копирования растений, отсутствие совмещения функций и догоровизна. Цель изобретения - устранение недостатков и повышение уровня адаптивного управления и роботизации технологий и техники. Поставленная цель достигается тем, что усилие для перемещения улавливателя и управления создают от взаимодействия с растениями с возможностью копирования улавливателем рядка растений и формирования траектории движения агрегата. Улавливатель соединен с механизмом поворота. Отделитель плодов и ягод выполнен в виде упругогибких ножей. Поверхность контакта улавливателя с растениями выполнена из упругоэластичного пенопласта. Отделитель и улавливатель плодов и ягод установлены на раме подвижно, с возможностью работы в качестве копира датчика отклонения от рядка растений и транспортера. Совмещением функций технологических, транспортных, управляющих и защищающих снижают металлоемкость и стоимость процессов. Основой изобретения является адаптивное изменение параметров, очувствление - открытость рабочих органов к внешним условиям, совмещение функций и процессов. Процессы копирования растений, вождения, уборки, улавливания, сбора, транспортирования, а также функции рабочих органов, копиров, датчиков автовождения, регулятора и объекта управления совмещают и согласовывают так, что при отклонении от заданного направления изменяют положение, дают сигнал и действуют в сторону устранения отклонения и ошибки. В графической части на фиг. 1 изображена схема агрегата для реализации способа управления при уборке плодов и ягод, вид сверху, с наложением эпюры скоростей, на фиг. 2 - схема устройства и связи с рулевым управлением, вид сзади, на фиг. 3 - схема уборочного модуля, вид сбоку, на фиг. 4 - схема рабочих органов (ножей) для уборки урожая, листьев и обрезков лозы, связанных с механизмом поворота в варианте слежения за двумя рядами, вид сверху, на фиг. 5 - схема ножей копира-датчика слежения за одним рядом. Устройство для реализации способа содержит энергетическое средство 1 (фиг. 1), рулевое управление 2 которого связано тягой 3 с улавливателем-транспортером 4 из упругодеформирующих копиров 5 рядка 6 растений и аналогичных копиров 7 с другой стороны рядка. Копиры могут быть изготовлены из упругой губки с носителем 8 и стержнями 9. Рабочие органы установлены на оси 10 (фиг. 2) с возможностью поворота и перемещения отделителей-встряхивателей 11, гребенки или лопатки 12 которых взаимодействуют с растениями в камере 13, на дне которого расположены копиры-улавливатели-транспортеры для отвода ягод 14 (фиг. 3) к желобкам 16 или другим транспортерам для перемещения урожая к накопителю (таре, бункеру). В качестве отделителя урожая и средства для уборки листьев, гроздей и обрезки лозы можно использовать упругогибкие ножи 17 (фиг. 4, 5) с приводом 18 на рычагах 19, связанных с ползунком 20 и пружинами 21 с возможностью копирования рядков и резания биомассы лезвием (заточкой) на внешней поверхности. В вертикальной плоскости положение ножей 17 и рычагов можно 19 фиксировать или изменять по высоте, а в горизонтальной плоскости их положение может определяться рядком, т.е. очувствлены к рядкам и являются датчиками сигнала для поворота. Улавливающие транспортеры 4, 5, 7, отделители, встряхиватели и ножи установлены с возможностью копирования рядов 6, выполнения функций датчика, регулятора и объекта управления, поворота и перемещения в сторону для получения и устранения сигнала. Транспортеры-улавливатели наклонены от рядка и могут приводиться силой реакции растений - влекомы толкающей силой энергосредства, деформироваться упругой силой, огибать растения вокруг шкивов или звездочек гибкими носителями 8 и стержнями сохранять форму, прижиматься друг к другу и к растениям без зазора и просвета и исключить потери урожая ягод на землю. Режущий аппарат 17 имеет форму конусной спирали и лезвие (заточку) на внешней поверхности. Конусная спираль 17 изготовлена в виде упругой спирали и может изменять форму в некоторых пределах. Два ножа в междурядии составляют копир рядков, датчик курса может чувствовать отклонение от стеблей рядка 6, изменять форму, деформироваться и перемещать ползунок 20 и ввести сигнал в механизм управления 2 для поворота в сторону совмещения осей агрегата и междурядия. В варианте исполнения для копирования одного рядка пружина 21 соединена с рычагом 19 и рамой с возможностью слежения за силами ножа 17 и пружины 21 (фиг. 5), приведенными к ползунку 20, для перемещения золотника пропорционально различию сил. Устройство работает следующим образом. При движении агрегата по междурядиям улавливающие транспортеры 4 катятся по рядку с двух сторон, приводятся в движение стволами, стеблями, столбами и преобразуют движение в противодвижение. Поступательное движение агрегата создает толкающую силу по стволам и растениям, транспортер катится аналогично гусенице трактора по земле при буксировке с той разницей, что опорой лент является рядок, и высокая упругость губки (пенопласта) двух транспортеров заполняет все пустоты между стволами. При отсутствии растений транспортеры не приводятся. Такие влекомые транспортеры-улавливатели не нуждаются в синхронном приводе от мотора и согласовании скоростей с учетом микрорельефа. Другие рабочие органы приводятся от двигателя. Отделители-встряхиватели 11 лопатками и гребенками 12 при вращении в одну или разные стороны отделяют плоды и ягоды от растений, транспортеры-улавливатели 4, 5, 7 улавливают и перемещают их и подают через желобок 16 в тару. Стенки камеры 13 исключают выход в сторону и направляют плоды и ягоды в тару или в транспортер, бункер и т.д. Отклонение агрегата от рядка вызывает различие деформаций упругих улавливателей-транспортеров, возникает сила-сигнал, перемещается золотник усилителя руля, направляется поток жидкости в цилиндр поворота агрегата в сторону снижения сигнала. При уводе агрегата вправо сигнал устраняется поворотом агрегата влево, а при уводе влево агрегат поворачивается вправо, в каждом случае выходной сигнал обратным знаком подается на вход управления, и формируется траектория движения по сигналу транспортера-улавливателя так, что силы взаимодействия улавливателей-транспортеров и рядков растений выравнивают, а изменение воспринимается как ошибка и устраняется поворотом агрегата. Технологическая машина реагирует на отклонение от рядка - базовой линии, как датчик выдает два сигнала: угол поворота в шарнире 10 в вертикальной плоскости свидетельствует об отклонении и накопленной ошибке, а угол поворота в горизонтальной плоскости характеризует ошибку курса. Слежение за двумя параметрами и их изменение в сторону устранения отклонений от заданных значений формирует траекторию. При этом совмещаются функции датчиков, регуляторов и объектов управления, улавливателей, транспортеров и технологического модуля. При отклонении улавливателя-транспортера от рядка растений вправо возникают разности сил и деформаций. Эта разность сил перемещает золотник, направляет рабочую жидкость в механизм поворота, и агрегат поворачивается влево до устранения сигнала. При отклонении влево от заданного направления агрегат поворачивается вправо до устранения ошибки и выравнивания сил и деформаций улавливателя с двух сторон рядка. В каждом случае сигнал об отклонении осей рядка и улавливателя вначале вызывает поворот и перемещение относительно шарнира 10, за пределами допустимой деформации упругого улавливателя-транспортера сигнал отрабатывается механизмом поворота. Поворот в сторону выравнивания деформации заканчивается совмещением осей рядка и улавливателей - устранением ошибки за счет чувствительности улавливателя и механизма поворота. Очувствление улавливателя-копира, перемещение и поворот относительно трактора и с трактором дают совмещение осей, выравнивание сил и деформаций упругого улавливателя-транспортера, сигнал отрабатывается механизмом поворота. Поворот в сторону выравнивания деформаций заканчивается совмещением осей рядка и улавливателей - устранением ошибки за счет чувствительности улавливателя и механизма поворота. Очувствление улавливателя-копира, перемещение и поворот относительно трактора и с трактором дают совмещение осей, выравнивание сил и деформаций, совмещение функций датчика и объекта управления. Улавливатели-транспортеры копируют рядок с двух сторон, причем скорость качения их по рядку близка к нулю, а нерабочие ветви имеют двойную скорость без привода внутри машины, следовательно, наводка рабочих органов на рядок без усилителя и с ним происходит в квазистатичесом состоянии. Упругость, эластичность мягкого улавливателя из губки, деформация до компенсации неточности взаимодействий машины и среды, адаптивное управление технологическим процессом дает совмещение функций датчика и объекта управления. При обрезке лозы и уборке гроздей и листьев ножи рабочих органов 17, 22 вращаются приводом 18, например гидромотором, урожай подается в тару или к рабочим органам для переработки. При отклонении осей агрегата и рядков рабочие органы изменяют форму в заданных пределах, после этого дают сигнал и изменяют свое положение исполнительным элементом агрегата, т.е. управляют собой, агрегатом и через него опять собой. Сигнал возникает в виде различия форм ножей, их деформаций и сил перемещения ползунка 20 и золотника усилителя механизма поворота. Исполнительные элементы поворачивают агрегат в сторону устранения сигнала. При уходе агрегата вправо или влево процессы управления дают сигнал, реализуют его и устраняют так же, как по сигналу улавливателя с той лишь разницей, что сигналы подаются ножами 17 и пружинами 21. Возможно прижатие двух рабочих органов к рядкам одной пружиной. При копировании одного рядка одним рабочим органом 17 (фиг. 5) сигнал характеризует отклонение сил ножа 17 и пружины 21 от некоторого заданного значения равновесия сил. Нож убирает урожай ягод, листьев, плодов и т.д. в зависимости от культуры и управляет собой и агрегатом. Общим для всех способов и средств является то, что при нежелательном отклонении от курса, например, вправо возникает различие деформаций рабочих органов, перемещается орган управления, агрегат поворачивается влево до снижения отклонения. В результате любого воздействия рабочего органа на рулевое управление агрегат поворачивается в обратном направлении. Такие взаимодействия изменяют форму рабочего органа, а затем формируют сигнал, устраняют его и поддерживают траекторию. Отсутствие разницы деформаций свидетельствует о нормальном положении. Отклонение осей агрегата и ряда приводит к некоторому повороту и смещению рабочих органов в допустимых пределах деформации, после чего исполнительный элемент механизма поворота устраняет рассогласование, т.е. процесс включает самоприспособление рабочих органов, управление агрегатом по угловому и линейному отклонениям - совмещение функций щупа, датчика, объекта управления и регулятора и согласование действий в некоторых заданных настроечных пределах. Рабочие органы-щупы-датчики-копиры изменяют положение, являются объектами управления. Их положение задается в реальной среде по одному сигналу, т.е. два рабочих органа не могут ввести два неоднозначных сигнала, не требуют сложных систем обработки информации. Таким образом, совмещая процессы копирования ряда, уборки или ухода, улавливания и перемещения материала, выравнивая силы воздействия на ряд, повышая чувствительность к среде, совмещая функции ножа, улавливателя, датчика, объекта управления и транспортера и регулятора при выполнении технологических процессов, повышают чувствительность к внешней среде, обеспечивают адаптивное управление. При использовании способа и устройства снижаются стоимость изготовления и эксплуатации, металлоемкость, экологическая опасность стряхивания корней и отклонения рабочих органов от ряда при уборке урожая ягод, плодов, гроздей, листьев, веток, лозы, а также потери урожая, включая листья винограда - продукта питания и лечения.ФОРМУЛА ИЗОБРЕТЕНИЯ1. Способ уборки плодов и ягод, включающий отделение их от растений, улавливание и перемещение, отличающийся тем, что усилие для перемещения улавливателя и управления создают от взаимодействия с растениями с возможностью копирования улавливателем рядка растений и формирования траектории движения агрегата. 2. Устройство уборки плодов и ягод, содержащее отделитель плодов и ягод от растений и улавливатель, отличающееся тем, что улавливатель соединен с механизмом поворота. 3. Устройство по п. 2, отличающееся тем, что отделитель плодов и ягод выполнен в виде упругогибких ножей. 4. Устройство по п.2, отличающееся тем, что поверхность контакта улавливателя с растениями выполнена из упругоэластичного пенопласта. 5. Устройство по п.2, отличающееся тем, что отделитель и улавливатель плодов и ягод установлены на раме агрегата подвижно с возможностью работы в качестве копира, датчика курса и отклонения от рядка растений, транспортера и объекта управления.Популярные патенты: 2245013 Устройство для обмолота легкоповрежденных культур на примере нута (варианты) ... формы, каждая пара обмолачивающих вальцов смонтирована таким образом, что в месте их наибольшего сближения впадина одного вальца расположена без контакта напротив выступа другого вальца, при этом все пары вальцов, включая приемные, установлены с возможностью взаимного дискретного смещения, и размещенную под молотильно-сепарирующим устройством деку, согласно изобретению оно снабжено сепаратором в виде взаимно вращающихся двухлопастных битеров, размещенных за парой обмолачивающих вальцов, и лотком, дека выполнена в виде гибкой бесконечной ленты с приводными барабанами по краям, огибающим барабаном между ними и натяжным барабаном под огибающим, внешняя поверхность ленты образована ... 2282959 Устройство для крепления навесного оборудования к транспортному средству ... которым используется гидроцилиндры управления нижними тягами трехточечного механизма навески.Предлагаемое техническое решение поясняется чертежами, где на фиг.1 изображен общий вид устройства, вид сбоку; на фиг.2 - общий вид устройства, вид сверху; на фиг.3 изображена дополнительная рама, вид сбоку; на фиг.4 - дополнительная рама, вид спереди; на фиг.5 - разрез по А-А на фиг.1; на фиг.6 - разрез по Б-Б на фиг.2; на фиг.7 изображен трехточечный механизм передней навески в рабочем положении, вид сверху; на фиг.8 изображен трехточечный механизм навески в нерабочем положении, вид сбоку; на фиг.9 - разрез по В-В на фиг.8; на фиг.10 - вид Г на фиг.2.Устройство для крепления навесного ... 2493697 Технологическая линия для подготовки к скармливанию пророщенного зерна ... Недостатком замочного аппарата является невозможность ежесуточного проращивания новой порции солода (порционность работы).Известна сушильная установка непрерывного действия [RU 2371651 C2, F26B17/04 (2006.01), 27.10.2009], состоящая из загрузочного бункера и разгрузочного бункера, замкнутого скребкового сетчатого ленточного транспортера, ведущего и ведомого барабанов, газораспределительного короба, вентиляторов.Недостатком сушильной установки является невозможность ворошения материала и низкая производительность, т.к. на транспортере высушиваемый материал лежит тонким слоем. Известна конвейерная многозонная сушилка для сушки сыпучих и плохосыпучих материалов [RU 2176059 С2, 7 ... 2141182 Культиватор ... указанный выше технический результат. Изобретение поясняется чертежами. На фиг.1 изображен культиватор для механического уничтожения переросших сорняков на паровых полях, вид в плане. На фиг. 2 - то же, вид слева. На фиг. 3 - вид А на фиг.1, H-образная рама секции рабочих органов. Сведения, подтверждающие возможность осуществления изобретения, заключаются в следующем. Культиватор (см. фиг. 1) содержит раму 1 с установленными на ней секциями. Кроме этого, культиватор снабжен прицепным устройством 2, опорными колесами 3 и 4 с винтовыми механизмами 5, механизмом 6 перевода рамы 1 в рабочее и транспортное положения с установленными на раме 1 секциями рабочих органов 7 и 8 переднего ... 2161400 Способ определения активности агентов ... 9) количество междоузлий, шт.; 10) количество листьев, шт.; 11) площадь листовой поверхности, мм2; 12) степень тургора растений (визуально); 13) цвет корней, стеблей, листьев (визуально); 14) наличие повреждений патогенами (визуально); 15) состояние листовых пластинок (изменение цвета, пятнистость, усыхание секторов, полное усыхание) - визуально; 16) масса листьев, мг; 17) развитие спящих почек (под листьями или между листочками) для укореняющихся растений); 18) состояние черешков листьев (визуально); 19) соотношение массы стеблей, мг и массы корней, мг; 20) соотношение массы листьев и массы стеблей, мг. Исследования проводят следующим образом. Материал для исследований помещают в ... |
Еще из этого раздела: 2310308 Способ определения выполненности семян сельскохозяйственных культур и устройство для его осуществления 2159721 Способ и устройство для крепления двигателя мотокультиватора 2200377 Сельскохозяйственный агрегат 2182420 Устройство для перерезания стволов деревьев 2093022 Устройство для выпаивания животных 2094986 Гербицидный состав 2235450 Малогабаритная машина для обескрыливания, очистки и сортирования лесных семян 2254705 Способ уплотнения и герметизации консервируемых кормов в рулонах 2474105 Плодосъемник шолина 2403703 Способ интенсификации роста растений |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||