Двухдисковый центробежный разбрасыватель гранулированных минеральных удобренийПатент на изобретение №: 2058702 Автор: Якимов Ю.И. Патентообладатель: Якимов Юрий Иванович Дата публикации: 27 Апреля, 1996 Адрес для переписки: подача заявки22.04.1991 публикация патента27.04.1996 Изображения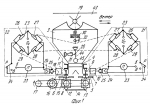 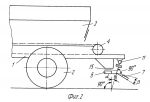 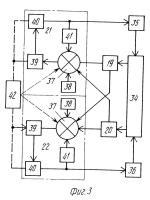 Сущность изобретения: устройство содержит раму 1, опорные колеса 2, технологическую емкость 3, питатель 4, диски 5 и 6 с лопатками 7 и механизмом 8 привода, двуплечий рычаг 9, редуктор 10, шарниры 11, 12, 13, стержень 14. 3 з. п. ф-лы, 3 ил. , , ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУИзобретение относится к сельскохозяйственному машиностроению, а именно к машинам для внесения минеральных удобрений. Цель изобретения более качественный рассев удобрений, достижение постоянства ширины захвата машины и уменьшение сноса боковым ветром удобрений, слетевших с дисков в сторону оси движения машины. На фиг. 1 дана принципиальная схема предлагаемого устройства; на фиг. 2 то же, вид сбоку; на фиг. 3 функциональная структурная схема устройства, отображающая взаимодействие его элементов автоматики в процессе работы. Двухдисковый центробежный разбрасыватель гранулированных минеральных удобрений содержит раму 1, опорные колеса 2, технологическую емкость 3, питатель 4, диски 5 и 6 с лопатками 7 и механизмом 8 привода. Один из дисков 5 установлен на раме 1 посредством двуплечего рычага 9 с возможностью поворота его в поперечно-вертикальной плоскости. Другой конец рычага 9 кинематически связан с редуктором 10. Второй диск 6 установлен на раме 1 с возможностью поворота его в поперечно-вертикальной плоскости вокруг шарнира 11. Кроме того, диск 6 соединен через шарниры 12 и 13 с первым диском 5 посредством стержня 14. Оси 15 вращения дисков 5 и 6 размещены в плоскости, отклоненной от вертикали на угол 5-10о. Механизм 8 привода дисков 5 и 6 последовательно связан через клиноременные передачи с вариатором 16 и ведущим шкивом 17, который получает вращение от вала отбора мощности трактора или гидромотора. Вариатор 16 кинематически связан с редуктором 18. Автоматический регулятор выполнен в виде первичного преобразователя 19 скорости и направления ветра, первичного преобразователя 20 угла крена рамы 1 машины и двух автономных блоков 21 и 22. Каждый из блоков 21 и 22 снабжен измерительным мостом 23 и последовательно соединенными с ним усилителем 24 постоянного тока и электродвигателем 25 с редуктором 10 и 18. Первичные преобразователи 19 и 20 соединены с измерительными мостами 23 обоих блоков. Редуктор 10 первого блока 21 кинематически связан с двуплечим рычагом 9, а редуктор 18 второго блока 22 с вариатором 16 механизма 8 привода дисков 5 и 6. Каждый измерительный мост 23 снабжен резистором-задатчиком 26. Плечи каждого моста 23 выполнены в виде потенциометров 27, 28 и 29 с движками. Движок каждого из потенциометров 27 соединен через индукционный датчик 30 с первичным преобразователем 19 скорости и направления ветра, а движок каждого потенциометра 28 с первичным преобразователем 20 угла крена рамы 1 машины. Движок потенциометра 29 в первом блоке 21 кинематически связан через редуктор 10 с электродвигателем 25, а во втором блоке 22 через редуктор 18. Для уменьшения колебания системы при работе устройства первичный преобразователь 20 и датчик 30 снабжены амортизаторами соответственно 31 и 32. Приборы 33, например гальванометры, каждого из блоков 21 и 22 предназначены для восприятия сигнала при балансировке соответствующего измерительного моста 23. Переключатели 34 служат для изменения рода работ, то есть или выполнения балансировки измерительного моста 23, или работы системы в режиме автоматической настройки рабочего органа, или разрыва электрической цепи после завершения балансировки моста 23 или работы устройства. В принципе, центробежный рабочий орган машины представляет собой объект управления 34 (см. фиг. 3). Он выполнен в виде дисков 5 и 6 с лопатками 7, механизма 8 привода и механизма поворота дисков 5 и 6 в поперечно-вертикальной плоскости, который включает шарниры 11, 12, 13, двуплечий рычаг 9 и стержень 14. Причем, механизм поворота дисков 5 и 6 и механизм 8 их привода оказывают непосредственное управляющее воздействие на объект управления 34 и поэтому являются регулирующими органами, соответственно 35 и 36. Объект управления 34 связан с автоматическим регулятором соответственно через регулирующие органы 35 и 36 и первичные преобразователи 19 и 20. Автоматический регулятор состоит из первичных преобразователей 19 и 20 и двух автономных блоков 21 и 22. Функциональная задача первого блока 21 состоит в поддержании симметричности распределения удобрений относительно оси движения машины, а второго блока 22 обеспечение неизменной ширины захвата. Каждый из блоков 21 и 22 включает последовательно соединенные друг с другом сравнивающий орган 37 с задатчиком 38, усилительный 39 и исполнительный 40 органы. Причем, сравнивающие органы 37 каждого блока соединены с первичными преобразователями 19 и 20. Функцию сравнивающего органа 37 выполняет измерительный мост 23, задатчика 38 резистор-задатчик 26, усилительного органа 39 усилитель 24 постоянного тока. Исполнительный орган 40 каждого блока выполнен в виде редуктора 10 или 18 с приводом от реверсивного электродвигателя 25, обмотка возбуждения которого соединена с усилителем 24 постоянного тока. Исполнительный орган 40 связан со сравнивающим органом 37 через обратную связь 41, а с объектом управления 34 через регулирующие органы 35 и 36. Обратная связь 41 между исполнительным 40 и сравнивающим 37 органами осуществляется через движок потенциометра 29, который кинематически связан с редуктором 10 или 18. Для питания исполнительного 40, усилительного 39 и сравнивающего 37 органов служит блок питания 42. Первичный преобразователь 19 скорости и направления ветра может быть выполнен в виде крыльчатого индукционного анемометра, который помещен в трубку 43, установленную горизонтально поперек продольной оси машины. Первичный преобразователь 20 угла крена рамы 1, может быть изготовлен, например, в виде шарнирно соединенного с рамой 1 поводка 44, на конце которого закреплен груз 45. К поводку 44 присоединен амортизатор 31. Для уменьшения сноса боковым ветром удобрений, слетевших в сторону оси движения машины, диски 5 и 6 следует выполнять плоскими или выпуклыми с углом конусности 5-10о. Механизм 8 привода дисков 5 и 6 последовательно связан через клиноременные передачи с вариатором 16 и ведущим шкивом 17, который получает вращение от вала отбора мощности трактора или гидромотора. Вариатор 16 кинематически связан с редуктором 18. Автоматический регулятор выполнен в виде первичного преобразователя 19 скорости и направления ветра, первичного преобразователя 20 угла крена рамы 1 машины и двух автономных блоков 21 и 22. Каждый из блоков 21 и 22 снабжен измерительным мостом 23 и последовательно соединенными с ним усилителем 24 постоянного тока и электродвигателем 25 с редуктором 10 и 18. Первичные преобразователи 19 и 20 соединены с измерительными мостами 23 обоих блоков. Редуктор 10 первого блока 21 кинематически связан с двуплечим рычагом 9, а редуктор 18 второго блока 22 с вариатором 16 механизма 8 привода дисков 5 и 6. Каждый измерительный мост 23 снабжен резистором-задатчиком 26. Плечи каждого моста 23 выполнены в виде потенциометров 27, 28 и 29 с движками. Движок каждого из потенциометров 27 соединен через индукционный датчик 30 с первичным преобразователем 19 скорости и направления ветра, а движок каждого потенциометра 28 с первичным преобразователем 20 угла крена рамы 1 машины. Движок потенциометра 29 в первом блоке 21 кинематически связан через редуктор 10 с электродвигателем 25, а во втором блоке 22 через редуктор 18. Для уменьшения колебания системы при работе устройства первичный преобразователь 20 и датчик 30 снабжены амортизаторами соответственно 31 и 32. Приборы 33, например гальванометры, каждого из блоков 21 и 22 предназначены для восприятия сигнала при балансировке соответствующего измерительного моста 23. Переключатели 34 служат для изменения рода работ, то есть или выполнения балансировки измерительного моста 23, или работы системы в режиме автоматической настройки рабочего органа, или разрыва электрической цепи после завершения балансировки моста 23 или работы устройства. В принципе, центробежный рабочий орган машины представляет собой объект управления 34 (см. фиг. 3). Он выполнен в виде дисков 5 и 6 с лопатками 7, механизма 8 привода и механизма поворота дисков 5 и 6 в поперечно-вертикальной плоскости, который включает шарниры 11, 12, 13, двуплечий рычаг 9 и стержень 14. Причем, механизм поворота дисков 5 и 6 и механизм 8 их привода оказывают непосредственное управляющее воздействие на объект управления 34 и поэтому являются регулирующими органами, соответственно 35 и 36. Объект управления 34 связан с автоматическим регулятором соответственно через регулирующие органы 35 и 36 и первичные преобразователи 19 и 20. Автоматический регулятор состоит из первичных преобразователей 19 и 20 и двух автономных блоков 21 и 22. Функциональная задача первого блока 21 состоит в поддержании симметричности распределения удобрений относительно оси движения машины, а второго блока 22 обеспечение неизменной ширины захвата. Каждый из блоков 21 и 22 включает последовательно соединенные друг с другом сравнивающий орган 37 с задатчиком 38, усилительный 39 и исполнительный 40 органы. Причем, сравнивающие органы 37 каждого блока соединены с первичными преобразователями 19 и 20. Функцию сравнивающего органа 37 выполняет измерительный мост 23, задатчика 38 резистор-задатчик 26, усилительного органа 39 усилитель 24 постоянного тока. Исполнительный орган 40 каждого блока выполнен в виде редуктора 10 или 18 с приводом от реверсивного электродвигателя 25, обмотка возбуждения которого соединена с усилителем 24 постоянного тока. Исполнительный орган 40 связан со сравнивающим органом 37 через обратную связь 41, а с объектом управления 34 через регулирующие органы 35 и 36. Обратная связь 41 между исполнительным 40 и сравнивающим 37 органами осуществляется через движок потенциометра 29, который кинематически связан с редуктором 10 или 18. Для питания исполнительного 40, усилительного 39 и сравнивающего 37 органов служит блок питания 42. Первичный преобразователь 19 скорости и направления ветра может быть выполнен в виде крыльчатого индукционного анемометра, который помещен в трубку 43, установленную горизонтально поперек продольной оси машины. Первичный преобразователь 20 угла крена рамы 1, может быть изготовлен, например, в виде шарнирно соединенного с рамой 1 поводка 44, на конце которого закреплен груз 45. К поводку 44 присоединен амортизатор 31. Для уменьшения сноса боковым ветром удобрений, слетевших в сторону оси движения машины, диски 5 и 6 следует выполнять плоскими или выпуклыми с углом конусности  0.-8о (см. фиг. 2). Применение вогнутых дисков приведет к резкому увеличению сноса удобрений боковым ветром, а выпуклых с большей конусностью к значительному уменьшению ширины захвата. Так, при расположении дисков 5 и 6 над почвой на высоте 0,7 м частицы удобрений, имеющие коэффициент парусности 0,1 1/м и слетающие с концов лопаток 7 со скоростью 21,7 м/с под углами к горизонту -5,0 и 5о распределяется на ширине захвата соотетственно равной 9,0; 12,7 и 16,7 м, но при этом сместятся боковым ветром на 0,29; 0,62 и 1,14 м. Если разместить оси 15 вращения дисков 5 и 6 в плоскости, отклоненной от вертикали на угол 9о, то (при той же ширине захвата) смещения частиц удобрений боковым ветром станут соответственно равными 0,09; 0,16 и 0,34 м. Отклонение осей 15 на угол менее 5о приводит к большому сносу удобрений боковым ветром, а на угол больший 10о, к ухудшению технологического процесса рассева удобрений, выражающемся в преждевременном их слете с лопаток 7 дисков 5 и 6 вблизи от оси движения машины. Это приводит к неравномерности распределения удобрений. Устройство работает следующим образом. Машину устанавливают на горизонтальную площадку и производят балансировку, то есть первоначальное уравновешивание в отдельности каждого измерительного моста 23. Для этого входное отверстия трубы 43 первичного преобразователя 19 закрывают заслонками (не показаны), переключатель 34 переводят в положение Б и, перемещая ползунок резистора-задатчика 26, добиваются отсутствия напряжения на выходе моста 23, регистрируемое прибором 33. После окончания балансировки измерительного моста 23 положение ползунка резистора-задатчика 26 стопорится, а переключатель 34 переводится в положение В. Перед выполнением работ входные отверстия трубы 43 первичного преобразователя 19 открывают, а переключатель 34 переводят в положение Р. Во время движения машины по полю гранулированные удобрения поступают из технологической емкости 3 через питатель 4 на вращающиеся диски 5 и 6 под действием центробежной силы слетают с концов лопаток 7, распределяясь по поверхности поля. При движении машины на ровном участке поля в безветренную погоду удобрения рассеваются вправо и влево от оси движения машины на одинаковые расстояния. При этом первичные преобразователи 19 и 20 не воспринимают возмущающих воздействий и не смещают движки потенциометров 27 и 28. Поэтому разбалансировки моста 23 не происходит, диски 5 и 6 находятся в одной плоскости, а частота их вращения близка к номинальной. При движении машины поперек склона переменной крутизны ее опорные колеса 2 обеспечивают копирование рельефа и рама 1 машины всегда занимает неизменное положение относительно поверхности склона. Но поводок 44, который шарнирно закреплен на раме 1 и под воздействием груза 45 занимает неизменно вертикальное положение, отклоняется на угол крена рамы 1, равный крутизне склона. Поворота поводка 44 относительно рамы 1 вызовет смещение движка потенциометра 28 и на выходе мостов 23 возникнет напряжение, которое усиливается усилителями 24 постоянного тока и подается на обмотки возбуждения реверсивных электродвигателей 25, кинематически связанных с соответствующими редукторами 10 и 18. От редуктора 10 движение передается двуплечему рычагу 9, который проворачивает диск 5 в поперечно-вертикальной плоскости. Это движение через шарнир 13, стержень 14 и шарнир 12 передается на диск 6, который смещается вокруг шарнира 11 в поперечно-вертикальной плоскости на тот же угол, что и диск 5. В результате диски 5 и 6 окажутся в параллельных плоскостях, то есть займут относительно рамы 1 новое одинаковое положение и удобрения слетят с них под большим углом к горизонту, чем угол крутизны склона. При этом симметричность распределения удобрений относительно оси движения машины достигается за счет одновременного увеличения дальности полета удобрений как вверх по склону, так и уменьшения ее вниз по склону. Но при ширине захвата машины оказывается всегда больше, чем при рассеве удобрений на горизонтальном участке поля. Для того, чтобы поддержать неизменной ширину захвата машины, одновременно с поворотом дисков 5 и 6 в поперечно-вертикальной плоскости, предусмотрено снижение их частоты вращения путем передачи силового воздействия через кинематическую связь от редуктора 18 на вариатор 16. В результате дальность полета удобрений в направлении, поперечном от оси вращения машины, становится равной дальности полета удобрений при движении машины по горизонтальному участку поля. При этом от редуктора 10 и 18 движение передается соответствующим движкам потенциометров 29, которые, смещаясь, способствуют уравновешиванию измерительных мостов 23. При отсутствии на выходе мостов 23 напряжения автоматическая система регулирования уравновешена, а положение дисков 5 и 6 относительно рамы 1 машины и их частота вращения зафиксированы до нового изменения крутизны склона. При рассеве удобрений в ветреную погоду крыльчатка первичного преобразователя 19 скорости и направления ветра начнет вращаться. Пропорционально ее частоте вращения провернется и на некоторый угол ось индукционного датчика 30 в соответствующем направлении. Это вызовет смещение движка каждого из потенциометров 27 и на выходе мостов 23 возникнет напряжение. Затем в блоках 21 и 22 автоматического регулятора происходят те же процессы, что и при движении машины по склону. В результате диски 5 и 6 займут относительно рамы 1 новое одинаковое положение и удобрения слетят с них против ветра под большим, а по ветру под меньшим углами к горизонту. За счет этого достигается симметричность распределения удобрений относительно оси движения машины. Но ширина захвата машины при этом всегда оказывается меньшей, чем при рассеве удобрений на горизонтальном участке поля в безветренную погоду. Для поддержания неизменной ширины захвата машины одновременно с поворотом дисков 5 и 6 (в поперечно-вертикальной плоскости) производится увеличение их частоты вращения. Оно выполняется автоматически принципиально таким же образом, как и при работе машины на склоне. В итоге автоматическая система регулирования уравновешивается до нового изменения скорости или направления ветра. При совместном воздействии ветра и крутизны склона, сигналы, поступающие от первичных преобразователей 19 и 20, алгебраически суммируются в соответствующих измерительных мостах 23, а усилительные 39, исполнительные 40 и регулирующие органы 35 и 36 воспринимают их. С применением предлагаемого изобретения достигается устойчивый качественный рассев удобрений при изменяющихся условиях работы машины, таких как склон переменной кривизны, скорость и направление ветра. 0.-8о (см. фиг. 2). Применение вогнутых дисков приведет к резкому увеличению сноса удобрений боковым ветром, а выпуклых с большей конусностью к значительному уменьшению ширины захвата. Так, при расположении дисков 5 и 6 над почвой на высоте 0,7 м частицы удобрений, имеющие коэффициент парусности 0,1 1/м и слетающие с концов лопаток 7 со скоростью 21,7 м/с под углами к горизонту -5,0 и 5о распределяется на ширине захвата соотетственно равной 9,0; 12,7 и 16,7 м, но при этом сместятся боковым ветром на 0,29; 0,62 и 1,14 м. Если разместить оси 15 вращения дисков 5 и 6 в плоскости, отклоненной от вертикали на угол 9о, то (при той же ширине захвата) смещения частиц удобрений боковым ветром станут соответственно равными 0,09; 0,16 и 0,34 м. Отклонение осей 15 на угол менее 5о приводит к большому сносу удобрений боковым ветром, а на угол больший 10о, к ухудшению технологического процесса рассева удобрений, выражающемся в преждевременном их слете с лопаток 7 дисков 5 и 6 вблизи от оси движения машины. Это приводит к неравномерности распределения удобрений. Устройство работает следующим образом. Машину устанавливают на горизонтальную площадку и производят балансировку, то есть первоначальное уравновешивание в отдельности каждого измерительного моста 23. Для этого входное отверстия трубы 43 первичного преобразователя 19 закрывают заслонками (не показаны), переключатель 34 переводят в положение Б и, перемещая ползунок резистора-задатчика 26, добиваются отсутствия напряжения на выходе моста 23, регистрируемое прибором 33. После окончания балансировки измерительного моста 23 положение ползунка резистора-задатчика 26 стопорится, а переключатель 34 переводится в положение В. Перед выполнением работ входные отверстия трубы 43 первичного преобразователя 19 открывают, а переключатель 34 переводят в положение Р. Во время движения машины по полю гранулированные удобрения поступают из технологической емкости 3 через питатель 4 на вращающиеся диски 5 и 6 под действием центробежной силы слетают с концов лопаток 7, распределяясь по поверхности поля. При движении машины на ровном участке поля в безветренную погоду удобрения рассеваются вправо и влево от оси движения машины на одинаковые расстояния. При этом первичные преобразователи 19 и 20 не воспринимают возмущающих воздействий и не смещают движки потенциометров 27 и 28. Поэтому разбалансировки моста 23 не происходит, диски 5 и 6 находятся в одной плоскости, а частота их вращения близка к номинальной. При движении машины поперек склона переменной крутизны ее опорные колеса 2 обеспечивают копирование рельефа и рама 1 машины всегда занимает неизменное положение относительно поверхности склона. Но поводок 44, который шарнирно закреплен на раме 1 и под воздействием груза 45 занимает неизменно вертикальное положение, отклоняется на угол крена рамы 1, равный крутизне склона. Поворота поводка 44 относительно рамы 1 вызовет смещение движка потенциометра 28 и на выходе мостов 23 возникнет напряжение, которое усиливается усилителями 24 постоянного тока и подается на обмотки возбуждения реверсивных электродвигателей 25, кинематически связанных с соответствующими редукторами 10 и 18. От редуктора 10 движение передается двуплечему рычагу 9, который проворачивает диск 5 в поперечно-вертикальной плоскости. Это движение через шарнир 13, стержень 14 и шарнир 12 передается на диск 6, который смещается вокруг шарнира 11 в поперечно-вертикальной плоскости на тот же угол, что и диск 5. В результате диски 5 и 6 окажутся в параллельных плоскостях, то есть займут относительно рамы 1 новое одинаковое положение и удобрения слетят с них под большим углом к горизонту, чем угол крутизны склона. При этом симметричность распределения удобрений относительно оси движения машины достигается за счет одновременного увеличения дальности полета удобрений как вверх по склону, так и уменьшения ее вниз по склону. Но при ширине захвата машины оказывается всегда больше, чем при рассеве удобрений на горизонтальном участке поля. Для того, чтобы поддержать неизменной ширину захвата машины, одновременно с поворотом дисков 5 и 6 в поперечно-вертикальной плоскости, предусмотрено снижение их частоты вращения путем передачи силового воздействия через кинематическую связь от редуктора 18 на вариатор 16. В результате дальность полета удобрений в направлении, поперечном от оси вращения машины, становится равной дальности полета удобрений при движении машины по горизонтальному участку поля. При этом от редуктора 10 и 18 движение передается соответствующим движкам потенциометров 29, которые, смещаясь, способствуют уравновешиванию измерительных мостов 23. При отсутствии на выходе мостов 23 напряжения автоматическая система регулирования уравновешена, а положение дисков 5 и 6 относительно рамы 1 машины и их частота вращения зафиксированы до нового изменения крутизны склона. При рассеве удобрений в ветреную погоду крыльчатка первичного преобразователя 19 скорости и направления ветра начнет вращаться. Пропорционально ее частоте вращения провернется и на некоторый угол ось индукционного датчика 30 в соответствующем направлении. Это вызовет смещение движка каждого из потенциометров 27 и на выходе мостов 23 возникнет напряжение. Затем в блоках 21 и 22 автоматического регулятора происходят те же процессы, что и при движении машины по склону. В результате диски 5 и 6 займут относительно рамы 1 новое одинаковое положение и удобрения слетят с них против ветра под большим, а по ветру под меньшим углами к горизонту. За счет этого достигается симметричность распределения удобрений относительно оси движения машины. Но ширина захвата машины при этом всегда оказывается меньшей, чем при рассеве удобрений на горизонтальном участке поля в безветренную погоду. Для поддержания неизменной ширины захвата машины одновременно с поворотом дисков 5 и 6 (в поперечно-вертикальной плоскости) производится увеличение их частоты вращения. Оно выполняется автоматически принципиально таким же образом, как и при работе машины на склоне. В итоге автоматическая система регулирования уравновешивается до нового изменения скорости или направления ветра. При совместном воздействии ветра и крутизны склона, сигналы, поступающие от первичных преобразователей 19 и 20, алгебраически суммируются в соответствующих измерительных мостах 23, а усилительные 39, исполнительные 40 и регулирующие органы 35 и 36 воспринимают их. С применением предлагаемого изобретения достигается устойчивый качественный рассев удобрений при изменяющихся условиях работы машины, таких как склон переменной кривизны, скорость и направление ветра.
ФОРМУЛА ИЗОБРЕТЕНИЯ1. ДВУХДИСКОВЫЙ ЦЕНТРОБЕЖНЫЙ РАЗБРАСЫВАТЕЛЬ ГРАНУЛИРОВАННЫХ МИНЕРАЛЬНЫХ УДОБРЕНИЙ, содержащий раму, опорные колеса, технологическую емкость, питатель, диски с лопатками и механизмом привода, причем один из дисков установлен на раме посредством двуплечего рычага с возможностью поворота его в поперечно-вертикальной плоскости, второй конец которого соединен с автоматическим регулятором, отличающийся тем, что, с целью более качественного рассева удобрений, второй диск установлен на раме с возможностью поворота его в поперечно-вертикальной плоскости и шарнирно соединен с первым диском посредством стержня. 2. Разбрасыватель по п.1, отличающийся тем, что, с целью достижения постоянства ширины захвата машины, механизм привода дисков соединен с автоматическим регулятором через вариатор. 3. Разбрасыватель по пп.1 и 2, отличающийся тем, что, с целью уменьшения сноса боковым ветром удобрений, слетевших с дисков в сторону оси движения машины, оси вращения дисков размещены в плоскости, отклоненной от вертикали на угол 5 10o. 4. Разбрасыватель по пп.1 и 2, отличающийся тем, что автоматический регулятор выполнен в виде первичного преобразователя скорости и направления ветра, первичного преобразователя угла крена рамы машины и двух автономных блоков, причем каждый из блоков снабжен соединенным с первичными преобразователями измерительным мостом и последовательно соединенными с ним усилителем постоянного тока и электродвигателем с редуктором, при этом редуктор первого блока кинематически связан с двуплечим рычагом, редуктор второго блока с вариатором механизма привода дисков, каждый измерительный мост снабжен резистором-задатчиком, плечи моста выполнены в виде потенциометров с движками, причем движки двух из них соединены с соответствующими первичными преобразователями, а движок третьего потенциометра кинематически связан через редуктор с электродвигателем соответствующего блока.Популярные патенты: 2487516 Почвообрабатывающая машина ... машины в транспортном положении.Это достигается тем, что почвообрабатывающая машина, содержащая раму с навесным устройством и опорными колесами, два симметрично установленных ротационных рабочих органа с эллиптическими плоскими, сферическими или коническими сплошными или вырезными дисками, концы которых при помощи тяг соединены с рамой, имеющие гидравлический привод от гидромоторов. Диски рабочих органов приварены к полому барабану и установлены с поворотом вокруг него по 45° относительно смежной лопасти, внутри которого на неподвижной опоре в виде швеллера с узкими полками установлен гидромотор с ведущей шестерней, находящей в зацеплении с зубчатым колесом с внутренними ... 2159526 Устройство для навешивания сельскохозяйственных орудий на трактор ... ... 2243658 Способ повышения урожайности картофеля и томатов ... формирования клубней) и в фазу пожелтения нижних листьев) опрыскивали водным раствором БАП из расчета 300-400 л/га.Для разработки технологии применения БАП проводили вегетационно-полевые опыты. В них варьировали концентрацию раствора БАП от 10-6 до 5·10 -4 М и количество обработок от трех в течение вегетации (в фазы бокового ветвления, в конце бутонизации - начале цветения (при переходе 50% растений к цветению, что совпадало с начальными этапами формирования клубней) и пожелтения нижних листьев) до еженедельной обработки. Контрольные растения обрабатывали аналогичным образом дистиллированной водой. В конце вегетации анализировали урожай товарных клубней. Воспроизведение ... 2121252 Агротранспортная система ... и каждая из них выполнена с продольной направляющей и перемещающимся по ней ползуном, подпружиненным упругим элементом и взаимосвязанным с путепроводом. 3. Система по п.2, отличающаяся тем, что связь ползуна с путепроводом выполнена в виде поперечных и диагональных перемычек. 4. Система по п.1, отличающаяся тем, что направляющие путепровода выполнены в виде двутавра, на его поверхности установлены токопроводы. 5. Система по п.1, отличающаяся тем, что колесное транспортное средство снабжено вертолетными винтами и выполнено с узлом сцепления приводных колес с путепроводом. 6. Система по п.5, отличающаяся тем, что узел сцепления выполнен в виде подпружиненных упругим элементом ... 2200377 Сельскохозяйственный агрегат ... отверстия для установки в них фиксирующей шпильки, при этом в центре хребтовой балки установлена механическая лебедка с храповым механизмом, а размещенный на раме плуга подвижный балласт - для уравновешивания изгибающего момента при значительном вылете переднего бруса, кроме того, передняя вертикальная стойка для крепления цепного модуля выполнена в виде плоского упругого элемента. 2. Сельскохозяйственный агрегат по п. 1, отличающийся тем, что механическая лебедка имеет свободный конец, оснащенный крюком для попеременной функциональной связи с каждой из двух проушин, закрепленных на противоположных концах переднего бруса, или с цепным модулем, или с подвижным балластом для ... |
Еще из этого раздела: 2460269 Малогабаритный картофелеуборочный комбайн 2140738 Производные n-арилгидразина, способ их получения, способ подавления насекомых и композиция для подавления насекомых 2197082 Установка для охлаждения молока с использованием естественного холода 2254705 Способ уплотнения и герметизации консервируемых кормов в рулонах 2492640 Способ выращивания рыбы в мелководных заморных озерах с применением глубокого водоема-спутника 2229127 Способ испытания растущих деревьев после рубок прореживания и проходных 2256318 Инъектор для капельного орошения 2154938 Способ охлаждения молока на животноводческих фермах и устройство для его осуществления 2166252 Способ удаления костного мозга из губчатых костных трансплантатов 2251837 Рабочий орган кустореза |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||