Приводное устройство и способ приведения в действие сельскохозяйственного рабочего механизмаПатент на изобретение №: 2497335 Автор: ЭЛЬ Себастьен (FR), БИЗЬОРЕК Стефан (FR) Патентообладатель: ДИР ЭНД КОМПАНИ (US) Дата публикации: 27 Января, 2011 Начало действия патента: 24 Июля, 2009 Адрес для переписки: 129090, Москва, ул. Б. Спасская, 25, стр.3, ООО "Юридическая фирма Городисский и Партнеры", пат.пов. А.В. Мицу, рег. 364 Изображения 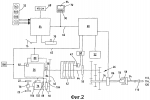  Группа изобретений относится к приводному устройству и способу для приведения в действие сельскохозяйственного рабочего механизма, а также к комбинации из транспортного средства и заявленного приводного устройства. Приводное устройство содержит двигатель, трансмиссию рабочего механизма с предохранительной муфтой, управляющее устройство. Управляющее устройство соединено с датчиком для определения момента вращения вала отбора мощности. Двигатель может связываться с выходом вала отбора мощности через разъемную муфту. Способ заключается в том, что приводят в действие двигатель и трансмиссию. Осуществляют размыкание трансмиссии, когда превышен момент отключения. Определяют момент вращения вала отбора мощности. Осуществляют размыкание муфты вала отбора мощности, когда момент вращения достигнет порогового значения или превысит его. Управляющее устройство применяет в нормальном режиме работы первое пороговое значение. Первое пороговое значение соответствует моменту вращения, который меньше момента отключения предохранительной муфты. Управляющее устройство после превышения первого порогового значения побуждает исполнительный элемент замыкать муфту вала отбора мощности. Управляющее устройство при замкнутой муфте допускает больший момент вращения на выходе вала отбора мощности, чем момент отключения предохранительной муфты. Заявленное устройство и транспортное средство представляют собой комбинацию этих устройств. Технический результат заключается в предотвращении перегрузки рабочих механизмов. 2 н. и 10 з.п. ф-лы, 3 ил. Изобретение относится к приводному устройству и к способу приведения в действие сельскохозяйственного рабочего механизма, включающему в себя: приводной двигатель, который через разъемную муфту вала отбора мощности связан с выходом вала отбора мощности приводным соединением, соединенную или соединяемую с выходом вала отбора мощности трансмиссию рабочего механизма, которая имеет предохранительную муфту, которая размыкает трансмиссию, когда превышен момент отключения, и управляющее устройство, которое соединено с датчиком, установленным на выходе вала отбора мощности для определения момента вращения, и приводится в действие, чтобы побуждать исполнительный элемент размыкать муфту вала отбора мощности, как только определенный датчиком момент вращения достигнет предварительно определенного порогового значения или превысит его. Уровень техники В случае сельскохозяйственных рабочих механизмов существует опасность того, что на основе перегрузок возникают повреждения трансмиссии или приводимых в действие элементов. Так, в пакетировочных прессах или навесных или буксируемых косилках-измельчителях скопление собираемой сельскохозяйственной продукции может привести к остановке элементов, служащих для приема и/или дальнейшей транспортировки сельскохозяйственной продукции, что вновь может привести к перегрузке трансмиссии. Другими примерами являются вращающиеся почвообрабатывающие рабочие органы, которые при слишком большой глубине обработки или тяжелой почве могут испытывать перегрузку, или косилки, которые предназначены для слишком толстых частей растений. Поэтому обычно защищают трансмиссию сельскохозяйственного рабочего механизма посредством предохранительных муфт, которые отключают трансмиссию, если превышен момент отключения. Здесь можно сослаться на уровень техники согласно DE 29504531 U1 и DE 19538370 C1. Кроме того, тягачи или несущие транспортные средства, которые перемещают сельскохозяйственный рабочий механизм по полю и содержат приводной двигатель, который через разъемную муфту вала отбора мощности связан с выходом вала отбора мощности для подключения трансмиссии рабочего механизма, обычно оснащены датчиком для определения момента вращения на выходе вала отбора мощности, который соединен с управляющим устройством, которое при превышении порогового значения отключает муфту вала отбора мощности, чтобы предотвратить повреждение в приводе вала отбора мощности (см. DE 1045588 А1). При подобных конфигурациях момент выключения может также зависеть от рабочего механизма и его рабочего состояния (DE 3434825 А1). Как правило, предохранительная муфта отключает рабочий механизм при вращающих моментах, которые еще не привели к отключению муфты вала отбора мощности. Водитель несущего транспортного средства или тягача тогда не имеет никакой другой возможности, кроме как вручную устранить причину перегрузки, то есть, например, в случае уборочной машины (пакетировочного пресса, косилки-измельчителя), выйти из своей кабины, устранить затор на элементах, служащих приему или дальнейшей транспортировке сельскохозяйственной продукции, и затем вновь вернуться в кабину, чтобы продолжить работу по уборке урожая, так как причина для перегрузки (то есть, в случае уборочной машины, затор) и после повторного включения вала отбора мощности еще имеется (если он не устранил ее перед этим) и приводит к тому, что предохранительная муфта и впредь срабатывает. Описанный процесс является затратным по времени, затруднительным и неудобным. В DE 19932272 А1 для преодоления этого недостатка предложено рабочие элементы пакетировочного пресса приводить в действие через предохранительные муфты, момент отключения которых может увеличиваться посредством увеличения рабочего давления. Если посредством датчика числа оборотов определяется пик нагрузки на одной из предохранительных муфт, то ее рабочее давление самостоятельно кратковременно повышается для преодоления пика нагрузки. Если это повышение имеет следствием устранение причины пика нагрузки, то снова устанавливается нормальный рабочий режим, в противном случае рабочее давление предохранительной муфты еще далее повышается, и предпринимаются дальнейшие меры для устранения причины перегрузки, такие как увеличение пропускной способности каналов транспортировки. В качестве недостатка здесь можно усмотреть относительно высокие затраты на предохранительные муфты с изменяемым моментом отключения. Задача Проблема, лежащая в основе изобретения, усматривается в том, чтобы предоставить приводное устройство и способ приведения в действие сельскохозяйственного рабочего механизма, которые простым способом обеспечивают возможность устранения причины перегрузки приводимых в действие элементов рабочего механизма. Решение Указанная проблема в соответствии с изобретением решается посредством решения по пунктам 1 и 13 формулы изобретения, причем в других пунктах формулы изобретения приведены признаки, которые далее развивают решение предпочтительным образом. Приводное устройство содержит приводной двигатель, который может представлять собой двигатель внутреннего сгорания или электродвигатель, который через разъемную муфту вала отбора мощности имеет возможность соединения с выходом вала отбора мощности. Рабочий механизм имеет трансмиссию, которая соединена или может быть соединена с выходом вала отбора мощности, и содержит предохранительную муфту, которая при превышении момента отключения размыкается. Электронное управляющее устройство соединено с исполнительным элементом для муфты вала отбора мощности и с датчиком, который определяет момент вращения на выходе вала отбора мощности. При нормальном режиме работы управляющее устройство сравнивает измеренное значение датчика с первым пороговым значением, которое соответствует моменту вращения, который меньше, чем момент отключения предохранительной муфты. Как только измеренное значение датчика превысит первое пороговое значение, управляющий элемент побуждает исполнительный элемент размыкать муфту вала отбора мощности, чтобы отключать трансмиссию рабочего механизма и защищать его от перегрузки. Затем управляющее устройство побуждает выполнить замыкание муфты вала отбора мощности и допускает при этом момент вращения на выходе вала отбора мощности, который больше, чем момент отключения предохранительной муфты. Таким способом происходит отключение выхода вала отбора мощности уже при моменте вращения, при котором предохранительная муфта рабочего механизма еще не срабатывает. Приводимые в действие элементы рабочего механизма при отключении выхода отбора мощности в соответствии с этим еще перегружены не в такой степени, чтобы отключалась их предохранительная муфта. Вторая попытка устранения причины перегрузки, например, затор в элементах приема сельскохозяйственной продукции уборочной машины, осуществляется затем с более высоким достижимым моментом вращения, чем при нормальном режиме работы, который больше, чем момент отключения предохранительной муфты. При последующем пуске в действие выхода вала отбора мощности можно в соответствии с этим в большинстве случаев устранить причину для перегрузки посредством приводных элементов рабочего механизма. Таким образом, относительно простыми средствами реализуется эффективная защита трансмиссии рабочего механизма и устранение причины возможной перегрузки. Управляющее устройство может самостоятельно вызывать включение муфты вала отбора мощности после превышения первого порогового значения и вызванного этим размыкания муфты вала отбора мощности или ожидать соответствующего управляющего ввода в подходящее устройство ввода. Аналогичным образом, более высокий допустимый момент вращения (который может быть не ограниченным по высоте или ограниченным), после превышения первого порогового значения и вызванного тем самым размыкания муфты вала отбора мощности, может выбираться самостоятельно управляющим устройством или осуществляться посредством управляющего ввода в подходящее устройство ввода. Предпочтительным образом управляющее устройство после превышения первого порогового значения и вызванного этим размыкания муфты вала отбора мощности сравнивает измеренное значение датчика со вторым пороговым значением, которое соответствует моменту вращения, который больше, чем момент отключения предохранительной муфты, и отключает предохранительную муфту только тогда, когда измеренное значение датчика равно или больше, чем второе пороговое значение. Второе пороговое значение может быть выбрано таким, что защищается только привод вала отбора мощности до выхода вала отбора мощности, или может быть согласовано с рабочим механизмом. Первое пороговое значение зависит в предпочтительной форме выполнения изобретения от рабочего состояния рабочего механизма, информация о котором подается на управляющее устройство. Тем самым может учитываться то обстоятельство, что некоторые не приводимые в действие или приводимые в действие с выхода муфты вала отбора мощности элементы рабочего механизма могут приводиться в различные положения, отключаться или приводиться в действие с различными скоростями и оказывать влияние на момент вращения, необходимый для приведения в действие рабочего механизма. Примером является резательное устройство пакетировочного пресса, которое приводит к более высокому потребному моменту вращения. Если элемент находится в рабочем состоянии, которое имеет следствием меньший рабочий момент всего рабочего механизма, то выгодным образом также первое пороговое значение снижается по отношению к другому рабочему состоянию элемента, которое обуславливает более высокий приводной момент рабочего механизма. Тем самым первое пороговое значение можно оптимально согласовать с защищаемыми элементами рабочего механизма. Определенный датчиком момент вращения может также применяться для ограничения или регулирования скорости тяги связанного с рабочим механизмом, являющегося его носителем или буксирующего его несущего транспортного средства или тягача. Скорость тяги посредством управляющего устройства самостоятельно ограничивается или приводится на значение, при котором определенный датчиком момент вращения соответствует номинальному значению, которое меньше, чем первое пороговое значение. Подобное ограничение или регулирование имеет смысл, например, в случае пакетировочных прессов, у которых ножи установлены в питающем канале. Если ножи установлены вне питающего канала, то предпочтительно происходит только вышеописанное ограничение момента вращения вала отбора мощности, но не регулирование или ограничение скорости тяги. В другой форме выполнения и в случае ножей, установленных вне питающего канала, возможно регулирование или ограничение скорости тяги. В случае, когда измеренное значение датчика во время нормального режима работы достигает или превышает первое пороговое значение, и муфта вала отбора мощности посредством исполнительного элемента размыкается, представляется возможным с помощью управления самостоятельно останавливать связанное с рабочим механизмом, являющееся его носителем или буксирующее его несущее транспортное средство или тягач. Тем самым достигается то, что рабочий механизм останавливается, и расположенное перед ним поле не остается необработанным. Предложенное изобретение подходит для любых рабочих механизмов, таких как пакетировочные прессы для прямоугольных или круглых тюков с постоянной или переменной величиной тюков, навесные или буксируемые косилки-измельчители, почвообрабатывающие механизмы, косилки и т.д. Приводной двигатель может находиться на несущем транспортном средстве или тягаче, в случае которого речь может идти о тракторе, и который несет на себе или буксирует рабочий механизм, или на самоходном движущемся рабочем механизме, например, на самоходной уборочной машине, такой как косилка-измельчитель, хлопкоуборочная машина, зерноуборочный комбайн или самоходный пакетировочный пресс, причем рабочий механизм может быть уборочной насадкой или другим механизмом для обработки сельскохозяйственной продукции, таким как стебле- или соломорезка. Пример выполнения Далее более подробно описан пример выполнения изобретения, представленный на чертежах, на которых представлено следующее: фиг.1 - вид сбоку сельскохозяйственного тягача в форме трактора с прикрепленным к нему рабочим механизмом в форме рулонного пресс-подборщика, фиг.2 - схематичное представление приводного устройства рабочего механизма, фиг.3 - блок-схема программы, согласно которой управляющее устройство работает при ограничении момента вращения на валу отбора мощности и при ограничении скорости тяги тягача. На фиг.1 показан вид сбоку сельскохозяйственного тягача 10 в форме трактора и связанного посредством дышла 14 со сцепным устройством (не показано) тягача 10 рабочего механизма в форме известного как такового (см. EP 0316506 А) рулонного пресс-подборщика 12 с переменной величиной камеры прессования. Тягач 10 установлен на несущей раме 18, которая опирается на ведомые передние колеса 20 и приводимые задние колеса 22 и несет кабину 24, в которой находится рабочее место 26 оператора. Рабочее место 26 оператора включает в себя сиденье 28, рулевое колесо 30, педаль 16 газа и другие педали для торможения и сцепления (не показано) и некоторые размещенные в зоне доступности оператора, находящегося на рабочем месте 26 оператора, элементы ввода для задания выбираемых функций рабочей машины 10. К последним относится устройство 32 выбора для ступени коробки 46 передач вала отбора мощности, рычаг 70 ручного управления подачей топлива, переключатель 68 вала отбора мощности и виртуальный терминал 72 системы шины, работающий согласно ISO 11783, с клавиатурой 90 и индикаторным устройством 94. Устройство 32 выбора для ступени коробки передач и/или переключатель 68 вала отбора мощности могут также быть реализованы как пункты меню на терминале 72. Вместо терминала 72 могут также применяться любые другие устройства ввода и индикации. Педаль 16 газа снабжена датчиком, который передает логике 64 интерфейса управления электрические сигналы, которые содержат информацию о соответствующем положении педали 16 газа. На фиг.2 схематично показано приводное устройство тягача 10 для приведения в действие задних колес 22 и вала 34 отбора мощности, который служит для приведения в действие приводимых элементов рабочего механизма 12. Приводной двигатель 36, как правило, дизельный мотор, приводит в действие вал 38, который служит для приведения в действие через зубчатое колесо 40 задних колес 22 и предпочтительно также передних колес 20 и, при необходимости, других приводимых в действие устройств тягача 10, таких как компрессор кондиционера и генератор тока. Задние колеса 22 и, при необходимости, передние колеса 20 приводятся в действие от зубчатого колеса 40 через муфту 88 и редуктор ходового механизма с бесступенчато или ступенями выбираемым передаточным отношением, постоянным в отдельных ступенях коробки передачи, и дифференциальную передачу 78. В представленной форме выполнения коробка передач содержит переключаемую под нагрузкой коробку 92 передач, которая содержит блок планетарных шестерен со сцеплениями и тормозами, которые обеспечивают возможность переключения ступеней коробки передач под нагрузкой, и включенную последовательно синхронно переключаемую коробку 76 передач. Переключаемая под нагрузкой коробка 92 передач и синхронно переключаемая коробка 76 передач выключаются соответствующим исполнительным элементом 104 или 106 для выбора ступени передачи. В трансмиссию между переключаемой под нагрузкой коробкой 92 передач и синхронно переключаемой коробкой 76 передач добавлена муфта (сцепление) 88, которая перемещается посредством исполнительного элемента 102 муфты между положением замыкания и размыкания. Вал 38 также связан с гидравлически приводимой в действие муфтой 42 вала отбора мощности, которая со стороны выхода соединена с входным валом 44 коробки 46 передач вала отбора мощности. Муфта 42 вала отбора мощности приводится в действие исполнительным элементом 47, который управляется посредством вентильного узла 48, который также соединен с тормозом 50, размещенным на входном валу 44. Коробка 46 передач вала отбора мощности имеет три различные выбираемые ступени передач и поэтому содержит три находящихся в зацеплении пары зубчатых колес. Ступень коробки передач выбирается посредством электрогидравлически (или электрически) приводимого в действие внешним усилием исполнительного элемента 52, который посредством смещаемых элементов муфты устанавливает, какое из трех размещенных на приводном валу 54 коробки 46 передач вала отбора мощности зубчатых колес находится в соединении замыкания по моменту вращения с приводным валом 54. Исполнительный элемент 52 обеспечивает возможность выбора из трех ступеней коробки передач, из которых первая в предложенной форме выполнения при номинальном числе оборотов приводного двигателя 36, равном 2100 в минуту, обеспечивает число оборотов приводного вала 54, равное 1000 в минуту, вторая при пониженном числе оборотов приводного двигателя 36, равном 1800 в минуту, обеспечивает число оборотов приводного вала 54, равное 540 в минуту, и третья при номинальном числе оборотов приводного двигателя 36, равном 2100 в минуту, обеспечивает число оборотов приводного вала 54, равное 540 в минуту. Кроме того, имеется возможность не связывать никакое зубчатое колесо коробки 46 передач вала отбора мощности с входным валом 44 или приводным валом 54, чтобы перевести коробку 46 передач вала отбора мощности в нейтральное положение, в котором приводной вал 54 и при активном тормозе 50 является свободно вращающимся. Приводной вал 54 связан с выходом 56 вала отбора мощности в форме хвостовика вала отбора мощности, на который может насаживаться снабженный пустотелым участком 58 вал 34 отбора мощности рабочего механизма 12. Вал 34 отбора мощности, как правило, выполнен как карданный вал. Управляющее устройство 60 связано с вентильным узлом 48 и с исполнительным элементом 52. Через приборную шину 62 (например, CAN-шину) оно также связано с логикой 64 интерфейса обслуживания, которая, со своей стороны, связана с устройством 32 выбора, педалью 16 газа, рычагом 70 ручного управления подачей топлива и переключателем 68 вала отбора мощности. Через шину 62 управляющее устройство 60, кроме того, связано с виртуальным терминалом 72, исполнительными элементами 104 и 106 и исполнительным элементом 102 сцепления 88. Устройство 32 выбора позволяет оператору посредством приведения в действие вручную одной из четырех клавиш выбрать любую из трех ступеней коробки 46 передач вала отбора мощности или нейтральное положение. Логика 64 интерфейса обслуживания передает информацию о задании оператором через шину 62 на управляющее устройство 60, которое, со своей стороны, управляет исполнительным элементом 52 соответственно полученной информации. Если оператор устанавливает переключатель 68 вала отбора мощности в рабочее положение, то логика 64 интерфейса обслуживания передает соответствующую информацию по шине 62 на управляющее устройство 60, которое, со своей стороны, побуждает вентильный узел 48 отпустить тормоз 50 и через исполнительный элемент 47 замкнуть муфту 42 вала отбора мощности. Если оператор переводит переключатель 68 вала отбора мощности в нерабочее положение, то логика 64 интерфейса обслуживания аналогичным образом передает соответствующую информацию через шину 62 на управляющее устройство 60, которое, со своей стороны, предписывает вентильному узлу 48 обеспечить размыкание исполнительным элементом 47 муфты 42 вала отбора мощности и активировать тормоз 50. Управляющее устройство 60, кроме того, соединено через шину 62 с системой 80 управления двигателем, которая управляет установкой 82 впрыска приводного двигателя 36, и на которую от датчика 84 числа оборотов подается информация о соответствующем числе оборотов вала 38. Связанный с управляющим устройством 60 датчик 86 определяет передаваемый приводным валом 54 момент вращения. Датчик 84 числа оборотов может взаимодействовать с соответствующим валом 38, например, оптически (посредством связанного с валом 38 кодирующего диска с отверстиями, который взаимодействует со световыми барьерами) или магнитным способом (посредством связанного с валом 38 магнита, который взаимодействует с индукционными катушками, реле с герметично закрытыми магнитоуправляемыми контактами или датчиками Холла), или определять число оборотов любым другим способом. Датчик 86 содержит размещенный на приводном валу 54 тензометрический датчик, выводы которого через скользящие контакты соединены с управляющим устройством 60, чтобы определять обусловленное передаваемым моментом вращения упругое кручение приводного вала 54. Могут также применяться любые другие формы выполнения для датчика 86, например, лазерные датчики для определения кручения приводного вала 54. Измерение момента вращения может осуществляться таким образом, что посредством датчиков (не показаны) на входе и выходе муфты 42 вала отбора мощности осуществляется определение числа оборотов, причем пробуксовка сцепления определяется из чисел оборотов, имеющих место перед и после муфты 42 вала отбора мощности, при этом пробуксовка сцепления постоянно устанавливается и поддерживается на постоянном значении, и из постоянной пробуксовки сцепления и значения, соответствующего давлению сцепления, определяется момент вращения, передаваемый через муфту 42 вала отбора мощности. На борту рабочего механизма 12 момент вращения передается от вала 34 отбора мощности через предохранительную муфту 110, которая может представлять собой любую муфту, которая при превышении определенного момента вращения размыкается, например, предохранительную фрикционную муфту или кулачковую переключающую муфту, на приводимые элементы рабочего механизма 12. При этом речь может идти, например, о подборщике 112 для сельскохозяйственной продукции, транспортирующем роторе 114, размещенном в питающем канале 118 выше подборщика 112, и о приводимых валках 120, которые окружают камеру 122 формирования тюков. Рабочий механизм 12 включает в себя, кроме того, гидравлически приводимые исполнительные элементы, такие как гидравлические цилиндры для открывания задней двери 124, которые связаны с бортовой гидравликой тягача 10. Резательное устройство 126, оснащенное размещенными рядом друг с другом ножами 126, может посредством исполнительного элемента 128 в форме гидравлического цилиндра, который через связанный с приборной шиной 62 вентиль (не показан) связан с бортовой гидравликой тягача 10, по выбору вводиться в питающий канал 118 ниже транспортирующего ротора 114 или выводиться из питающего канала 118 (или иным образом перемещаться, сдвигаться) при управлении оператором через виртуальный терминал 72 и приборную шину 62 и вентиль. Запоминающее устройство 108 на борту рабочего механизма 12 связано с приборной шиной 62. Во время рабочего режима (уборки) управляющее устройство 60 действует согласно блок-схеме последовательности операций по фиг.3. После запуска на этапе 200 на этапе 202 опрашивается, находится ли нож 126 в питающем канале 118. Если это не имеет места, то осуществляется этап 204, на котором управляющее устройство 60 предписывает системе 80 управления двигателем управлять приводным двигателем 36 с числом оборотов, которое соответствует действительному вводу устройства 32 выбора, т.е., в зависимости от нажатой клавиши устройства 32 выбора, с постоянным числом оборотов, равным 2100 в минуту или 1800 в минуту, в то время как ступень коробки 46 передач вала отбора мощности установлена на подходящее для рабочего механизма 12 значение. В предпочтительной форме выполнения число оборотов приводного двигателя 36 и ступень коробки 46 передач вала отбора мощности устанавливаются на основе данных в запоминающем устройстве 108 самостоятельно посредством управляющего устройства 60. Кроме того, на этапе 204 скорость тяги тягача 10 задается оператором посредством педали 16 газа или рычага 70 ручного управления подачей топлива. Управляющее устройство 60 управляет исполнительными элементами 104 и 106, перед и после приведения в действие исполнительного элемента 106 исполнительным элементом 102 муфты для размыкания и замыкания сцепления 88, так что коробка передач приводит в действие колеса 22 с желательной скоростью. Момент вращения на приводном валу 54, измеренный датчиком 86, сравнивается на этапе 206 с первым пороговым значением. Первое пороговое значение меньше, чем момент отключения предохранительной муфты 110. Оно может вводиться как абсолютное значение или величина в процентах момента отключения предохранительной муфты 110 оператором через виртуальный терминал 72 или считываться из запоминающего устройства 108, причем во втором случае также момент отключения предохранительной муфты 110 считывается из запоминающего устройства 108. Если момент вращения приводного вала 54 и, тем самым, на валу 34 отбора мощности меньше, чем первое пороговое значение, то можно исходить из нормального режима работы рабочего механизма 12, и снова следует этап 202. В противном случае следует исходить из того, что имеет место скопление собранного материала в подборщике 112 или в транспортирующем канале 116 или другая помеха в рабочем механизме 12. На этапе 208 управляющее устройство способствует тому, что исполнительный элемент 47 размыкает муфту 42 вала отбора мощности, чтобы прервать приведение в действие приводимых элементов рабочего механизма 12. Кроме того, может активироваться тормоз 50. Кроме того, также останавливается тягач 10, например, путем размыкания сцепления 88, и активируется стояночный тормоз тягача 10 и, при необходимости, рабочего механизма 12. Затем следует этап 210, на котором управляющее устройство самостоятельно или в ответ на управляющий ввод через виртуальный терминал 72 побуждает исполнительный элемент 47 вновь замкнуть муфту 42 вала отбора мощности, при необходимости с последующим отпусканием тормоза 50. Приводной двигатель вновь работает с выбранным числом оборотов. В соответствии с этим пытаются устранить помеху с помощью момента вращения, который больше, чем момент отключения предохранительной муфты 110. Управляющее устройство 60 сравнивает на следующем этапе 212 значение момента вращения датчика 86 со вторым пороговым значением, которое больше, чем момент отключения предохранительной муфты 110. Это второе пороговое значение может задаваться мощностью приводного двигателя 36 и коробки 46 передач вала отбора мощности и постоянно храниться в управляющем устройстве 60. В качестве альтернативы, оно как абсолютное значение или значение, кратное первому пороговому значению или моменту отключения предохранительной муфты 110, вводится оператором через виртуальный терминал 72 или считывается из запоминающего устройства 108. Если на этапе 212 момент вращения на приводном валу 54 и, следовательно, на валу 34 отбора мощности равен или больше, чем второе пороговое значение, то помеха продолжает действовать (возможно, на предохранительной муфте 110, которая не размыкается при желательном моменте вращения, или на датчике 86), так что затем следует этап 214, на котором муфта 42 вновь размыкается, и тормоз 50 включается. Таким образом, этап 212 служит, в первую очередь, защите приводных элементов на борту тягача 10. Оператор должен затем покинуть свое рабочее место и попытаться устранить помеху. В случае успешного исхода затем вновь следует этап 202. В случае если на этапе 212 момент вращения, определенный датчиком 86, меньше, чем второе пороговое значение, то осуществляется этап 216, на котором управляющее устройство 60 проверяет, была ли устранена помеха. Об устранении помехи можно, например, заключить, если момент вращения на датчике 86 был сначала относительно высок (вблизи момента отключения предохранительной муфты 110) и затем снова снижается на меньшее значение, которое, однако, больше нуля, так как тогда можно сделать вывод, что имеет место затор в подборщике 112 или в транспортирующем канале 116, который сначала привел к повышению момента вращения выше первого порогового значения и затем при его устранении обусловил более высокое значение момента вращения. Чтобы проверить, действительно ли помеха была устранена, может также осуществляться управляющий ввод, например, в виртуальный терминал 72, которым устранение помехи подтверждается, или определяется, вращается ли предохранительная муфта на стороне выхода. Если на этапе 216 помеха не устранена, то осуществляется этап 214, в противном случае этап 218, на котором управляющее устройство 60 обеспечивает то, что тягач вновь приводится в движение за счет того, что исполнительный элемент 102 сцепления замыкает сцепление 88, и последовательно применяются подходяще ступени коробок передач 76 и 92, чтобы тягачу 10 с рабочим механизмом 12 придать достаточно плавное ускорение. Затем следует этап 202. Если же на этапе 202 оказывается, что ножи 126 находятся в питающем канале 118, то следует этап 220. На этом этапе 220 задается скорость тяги тягача 10 либо оператором через рычаг 70 ручного управления подачей топлива, либо посредством педали 16 газа и некоторым способом при ограничении посредством управляющего устройства 60, чтобы определенный датчиком 86 момент вращения был меньше или равен номинальному значению, либо скорость тяги самостоятельно регулируется управляющим устройством 60 таким образом, чтобы определенный датчиком 86 момент вращения был, по меньшей мере, примерно равен номинальному значению. Это номинальное значение меньше, чем первое пороговое значение, и может вводиться как абсолютное значение или величина в процентах (например, 75%) момента отключения предохранительной муфты 110 оператором через виртуальный терминал 72 или считываться из запоминающего устройства 108. Относительно деталей подобного регулирования скорости, при котором также может приниматься во внимание величина соответствующего непосредственно выработанного тюка, можно сослаться на публикацию DE 102005029405 А1, которая посредством ссылки включена в настоящий документ. Тягач 10 в соответствии с этим непрерывно приводится в действие со скоростью, которая имеет следствием скорость уборки сельскохозяйственной продукции, при которой на валу 54 отбора мощности имеет место момент вращения, который меньше, чем первое пороговое значение. Если вдруг потребуется убирать большие количества собираемого материала, или собираемый материал будет более трудно транспортировать, например, ввиду повышенной влажности, то управляющее устройство 60 может без проблем обнаруживать намечающуюся перегрузку и реагировать на нее, без срабатывания предохранительной муфты 110. После этапа 220 следует этап 222, который соответствует этапу 206, и за ним снова следует этап 202, если измеренный датчиком 86 момент вращения меньше, чем первое пороговое значение. В противном случае следует этап 224, который соответствует этапу 208, за которым следует этап 226, который соответствует этапу 210, за которым вновь следует этап 228, который соответствует этапу 212. Если определенный датчиком 86 момент вращения на этапе 228 равен или больше, чем второе пороговое значение, то также следует этап 214, а в противном случае следует этап 230, который соответствует этапу 216. Если этап 230 указывает на то, что помеха была устранена, то следует этап 232, соответствующий этапу 218, а в противном случае следует этап 214. На основании изложенного можно подытожить способ действия управления 72 таким образом, что в нормальном режиме работы муфта 42 вала отбора мощности отключается, если датчиком 86 определен момент вращения, который больше, чем момент отключения предохранительной муфты 110. После отключения на валу 34 отбора мощности допускается больший момент вращения, чтобы посредством еще имеющегося резерва момента вращения устранить помеху или перегрузку. Формула изобретения1. Приводное устройство для приведения в действие сельскохозяйственного рабочего механизма (12), включающее в себя приводной двигатель (36), который через разъемную муфту (42) вала отбора мощности связан с выходом (56) вала отбора мощности приводным соединением, соединенную или соединяемую с выходом (56) вала отбора мощности трансмиссию рабочего механизма (12), которая имеет предохранительную муфту (110), которая размыкает трансмиссию, когда превышен момент выключения, и управляющее устройство (60), которое соединено с датчиком (86), установленным на выходе (56) вала отбора мощности для определения момента вращения, и приводится в действие, чтобы побуждать исполнительный элемент (47) размыкать муфту (42) вала отбора мощности, как только определенный датчиком (86) момент вращения достигнет предварительно определенного порогового значения или превысит его, отличающееся тем, что управляющее устройство (60) приводится в действие, чтобы в нормальном рабочем режиме применять первое пороговое значение, которое соответствует моменту вращения, который меньше, чем момент отключения предохранительной муфты (110), и управляющее устройство (60) приводится в действие после превышения первого порогового значения и обусловленного этим размыкания муфты (42) вала отбора мощности, чтобы побуждать исполнительный элемент (47) замыкать муфту (42) вала отбора мощности и при замкнутой муфте (42) вала отбора мощности допускать момент вращения на выходе (56) вала отбора мощности, который больше, чем момент отключения предохранительной муфты (110). 2. Приводное устройство по п.1, отличающееся тем, что управляющее устройство (60) приводится в действие, чтобы повторное подсоединение муфты (42) вала отбора мощности после превышения первого порогового значения проводить самостоятельно или согласно вводу оператора. 3. Приводное устройство по п.1 или 2, отличающееся тем, что управляющее устройство (60) приводится в действие, чтобы после превышения первого порогового значения и вызванного тем самым размыкания муфты (42) вала отбора мощности побуждать исполнительный элемент (47) замыкать муфту (42) вала отбора мощности и затем побуждать исполнительный элемент (47) размыкать муфту (42) вала отбора мощности, как только определенный датчиком (86) момент вращения достигнет или превысит второе пороговое значение, которое соответствует моменту вращения, который больше, чем момент отключения предохранительной муфты (110). 4. Приводное устройство по п.1, отличающееся тем, что управляющее устройство (60) приводится в действие, чтобы после превышения первого порогового значения самостоятельно или согласно вводу оператора допускать на валу (56) отбора мощности момент вращения, который больше, чем момент отключения предохранительной муфты (110). 5. Приводное устройство по п.1, отличающееся тем, что на управляющее устройство (60) подается информация относительно рабочего состояния рабочего механизма (12), и что управляющее устройство (60) приводится в действие, чтобы выбирать первое пороговое значение в зависимости от рабочего состояния. 6. Приводное устройство по п.1, отличающееся тем, что управляющее устройство (60) приводится в действие, чтобы скорость тяги связанного с рабочим механизмом (12) несущего транспортного средства или тягача (10) самостоятельно ограничивать или задавать, чтобы определенный датчиком (86) момент вращения не превышал или достигал номинального значения, которое меньше, чем первое пороговое значение. 7. Приводное устройство по п.1, отличающееся тем, что первое и/или второе пороговое значение может вводиться оператором в устройство (72) ввода или считываться из запоминающего устройства (108), которое находится на рабочем механизме (12). 8. Приводное устройство по п.1, отличающееся тем, что управляющее устройство (60) приводится в действие, чтобы самостоятельно останавливать связанное с рабочим механизмом (12) несущее транспортное средство или тягач (10), если определенный датчиком (86) момент вращения достигает или превышает первое пороговое значение. 9. Комбинация из несущего транспортного средства или тягача (10), рабочего механизма (12) и приводного устройства по любому из предыдущих пунктов. 10. Комбинация по п.9, отличающаяся тем, что рабочий механизм (12) является пакетировочным прессом. 11. Комбинация по п.10, отличающаяся тем, что рабочее состояние рабочего механизма (12) представляет положение ножей (126), которые по выбору могут вводиться в транспортирующий канал (118). 12. Комбинация по п.11, отличающаяся тем, что управляющее устройство (60) приводится в действие, чтобы только при помещенных в транспортировочный канал ножах (126) скорость тяги ограничивать или задавать таким образом, чтобы определенный датчиком (86) момент вращения не превышал или не достигал номинального значения. 13. Способ для приведения в действие сельскохозяйственного рабочего механизма (12), содержащий следующие этапы: приведение в действие приводного двигателя (36), который через разъемную муфту (42) вала отбора мощности связан с выходом (56) вала отбора мощности приводным соединением, приведение в действие соединенной с выходом (56) вала отбора мощности трансмиссии рабочего механизма (12), которая имеет предохранительную муфту (110), которая размыкает трансмиссию, когда превышен момент отключения, и приведение в действие управляющего устройства (60), которое соединено с датчиком (86), установленным на выходе (56) вала отбора мощности для определения момента вращения, и побуждает исполнительный элемент (47) размыкать муфту (42) вала отбора мощности, как только определенный датчиком (86) момент вращения достигнет предварительно определенного порогового значения или превысит его, отличающийся тем, что управляющее устройство (60) применяет в нормальном режиме работы первое пороговое значение, которое соответствует моменту вращения, который меньше, чем момент отключения предохранительной муфты (110), и управляющее устройство (60) после превышения первого порогового значения и вызванного этим размыкания муфты (42) вала отбора мощности побуждает исполнительный элемент (47) замыкать муфту (42) вала отбора мощности и при замкнутой муфте (42) вала отбора мощности допускает момент вращения на выходе (56) вала отбора мощности, который больше, чем момент отключения предохранительной муфты (110). Популярные патенты: 2055465 Система приготовления и подачи питательного раствора в теплице ... многоярусные узкостеллажные гидропонные установки 4 с лотками 5, коллекторы 6 для распределения раствора трубопровод 7 коллекторов, источники 8 оптического излучения, расположенные между гидропонными установками, подводящий трубопровод 9, емкость для питательного раствора 10. В емкость 10 для питательного раствора вмонтирован теплообменник 11, обраэующий эамкнутый контур с теплообменником 12, расположенным вне емкости. Контур из теплообменников 10 и 12 содержит насос 13 для перекачки жидкости, управляемый выключателем 14, электрически связанным со шкафом управления 15. В качестве шкафа управления 15 может быть выбран любой программируемый контроллер. С емкостью 10 посредством ... 2124820 Устройство для изменения объемного заряда в атмосфере ... Скрэйзу, равно 1,12 10-9 а/м, так что заряд на поверхности земли был бы нейтрализован за (3,23 / 1,12) 103 с, т.е. примерно за 48 мин. По расчетам, в тех местах на земле, где градиент потенциала меньше, а ток атмосфера - земля больше, заряд нейтрализуется за более короткие промежутки времени, чем в Кью; для океанов это время составляет примерно 6 мин. Объяснения требует тот факт, что проводимость земли в Кью по прошествии 48 мин все еще имеет заряд, равный -3,23 10-9 Кл/м2, хотя заряд, равный +3,23 10-9 Кл/м2, уже поступил на поверхность земли за счет проводимости атмосферы. Объясняется это тем, что земля - проводник и соответствующий отрицательный заряд поступил в некоторой ... 2462016 Устройство для протравливания семян ... помощью лопаток подает их в бункер, из которого семена через открытую шиберную заслонку поступают в камеру, где обрабатываются суспензией ядохимикатов из распылителя. В шнековом смесителе семена перемешиваются с ядохимикатами и выгружаются в мешки через выгрузную горловину. При помощи шиберной заслонки осуществляется дозирование поступления семян из бункера в камеру. Датчик управляет подачей ядохимикатов в распылитель. При заполнении бункера до уровня датчика привод ходовой части отключается.Недостаток устройства - машина узкоспециализированная, выполняет только протравливание, нет универсальности, в связи с чем загруженность протравливателя в течение года незначительная.Технической ... 2115638 Способ переработки органических отходов животного происхождения в кормовой белок и биогумус ... течение 14 - 21 сут. Для извлечения отработавших срок червей-производителей используют травяную муку с влажностью 50 - 90%. Для создания условий парникового эффекта температуру жидкости в поддонах под емкостью для компостирования поддерживают на 1-6oC выше температуры стенок емкости. После отделения коконов и червей от биогумуса его разделяют на три фракции: первую с размером частиц менее 0,5 мм используют в качестве подстилки при содержании домашних птиц для поглощения запаха помета, вторую фракцию с размером частиц более 2 мм возвращают на первичное смешение, третью фракцию с размером частиц 0,5-2 мм используют в качестве удобрения. Необходимо использовать фиксированный состав ... 2175177 Агромост с оснасткой для прокладки и уплотнения постоянных грунтовых колей ... тележек, причем агромост имеет редукторы, приподнимающие катки над колеей, при этом агромост имеет визирное устройство для управления движением агромоста по колеям; - при этом устройство для управления движением агромоста состоит из двух трубчатых штанг, шарнирно закрепленных концами на обеих сторонах фермы, а вторые концы штанг фиксированы вантами, закрепленными на концах самоходных тележек; - при этом катки выполнены полыми и каждый из них имеет два отверстия, разнесенные по диаметру, запирающиеся пробками с резьбой. На фиг. 1 - схематическое изображение агромоста, вид сверху; пунктиром показана одна из (подвижных платформ) агромоста с сельхозагрегатами, навешенными на боковые ... |
Еще из этого раздела: 2160533 Способ профилактики и коррекции транспортного стресса у крупного рогатого скота 2488437 Способ получения микрокапсул пестицидов методом осаждения нерастворителем 2067798 Агромостовой комплекс 2414114 Зерноуборочный комбайн 2144756 Селекционная сеялка для посева семян в кассеты 2151493 Установка для гидропонного выращивания растений 2293463 Способ разработки лесосек 2056743 Установка для выращивания пушных зверей 2452155 Лапа культиватора 2016512 Средство для борьбы против стресса у рыб и способ борьбы со стрессом у рыб |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||