Сельскохозяйственный виндроуэр (варианты) и жатка для уборки зерновыхПатент на изобретение №: 2480979 Автор: БОМЛЕНИ Дьюэйн М. (US), ХАЛСКЕР Джей Т. (US), БЬЮНД Трэвис Л. (US) Патентообладатель: ДИР ЭНД КОМПАНИ (US) Дата публикации: 10 Октября, 2009 Начало действия патента: 11 Марта, 2008 Адрес для переписки: 129090, Москва, ул. Б. Спасская, 25, стр.3, ООО "Юридическая фирма Городисский и Партнеры" Изображения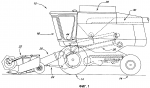 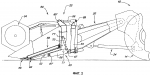 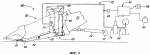 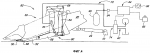 Группа изобретений относится к сельскохозяйственному машиностроению и может быть использована в уборочных машинах. Виндроуэр содержит шасси транспортного средства, подъемную раму и соединенную с ней жатку для уборки зерновых. Подъемная рама подвижно соединена с шасси транспортного средства. Жатка включает основную раму и встроенную плавающую систему, имеющую, по меньшей мере, один плавающий цилиндр, соединенный с основной рамой. На жатке расположен датчик, указывающий относительное положение плавающего цилиндра. Жатка включает подвеску, которая может быть избирательно установлена на одном из различным образом конфигурированных типов сельскохозяйственных уборочных машин. Группа изобретений обеспечивает поддержание низкой высоты резания относительно грунта и более полный сбор урожая. 3 н. и 15 з.п. ф-лы, 12 ил. Настоящее изобретение относится к сельскохозяйственнымуборочным машинам и, более конкретно, к плавающим системам, которые используются на жатках таких уборочных машин. Сельскохозяйственная уборочная машина, такая как комбайн или виндроуэр, является крупной машиной, которую используют для уборки с поля разнообразных зерновых культур. В случае комбайна во время операции уборки жатка, размещенная спереди комбайна, срезает с поля созревшие зерновые культуры. Приемная камера молотилки, поддерживающая жатку, передает зерновой материал в комбайн. Молотильный и разделительный агрегаты комбайна отделяют зерно от зернового материала и передают очищенное зерно в бункер для зерна для временного хранения. Убранный материал за исключением зерна покидает комбайн через заднюю часть. Разгрузочный шнек передает зерно из бункера для зерна в грузовик или другой прицеп для зерна с целью транспортировки, или в другой приемный бункер для хранения. В случае виндроуэра во время операции уборки жатка, размещенная спереди виндроуэра, срезает с поля созревшие зерновые культуры. Убранный зерновой материал транспортируется в заднюю часть жатки, где формовочные экраны образуют валки срезанных зерновых культур между колесами транспортного средства, предназначенные для естественного просушивания зернового материала. В ходе последующих полевых работ происходит подборка валков для дальнейшей обработки, такой как разделение и очистка в случае уборки зерновых культур, или пакетирование, или измельчение в случае уборки сена. Валковые жатки и полотенные жатки являются типами жаток, обычно применяемыми при уборке таких зерновых культур, как мелкозерные злаковые культуры, горох, чечевица и рис.Во время операции уборки урожая жатками этих типов желательно поддерживать высоту резания на как можно более низкой высоте относительно грунта, чтобы собрать с поля практически весь созревший урожай. Для выполнения этой задачи известно использование плавающей системы жатки или системы слежения за рельефом, позволяющей жатке следовать изменениям поверхности грунта, не зарываясь при этом в почву. Изготовители разработали ряд плавающих систем для жаток, предназначенных для использования на уборочных машинах, таких как комбайны, виндроуэры и т.д., в течение многих лет. В патентах США В технике существует необходимость в плавающей системе жатки, встроенной в жатку, и в жатке, которая может использоваться с различными типами уборочных машин. Согласно первому объекту настоящего изобретения создан сельскохозяйственный виндроуэр, содержащий шасси транспортного средства; подъемную раму, подвижно соединенную с шасси транспортного средства, и жатку для уборки зерновых, соединенную с подъемной рамой, причем жатка включает в себя основную раму и встроенную плавающую систему жатки, а плавающая система жатки имеет, по меньшей мере, один плавающий цилиндр, соединенный с основной рамой, и датчик положения на жатке, указывающий относительное положение упомянутого плавающего цилиндра. Предпочтительно, жатка включает в себя подвеску, подвижно поддерживающую основную раму на подъемной раме, причем каждый плавающий цилиндр присоединен между подвеской и основной рамой. Предпочтительно, подвеска включает в себя множество связующих звеньев, подвижно поддерживающих основную раму, причем плавающий цилиндр присоединен между основной рамой и соответствующим одним из множества связующих звеньев. Предпочтительно, сельскохозяйственный виндроуэр содержит два плавающих цилиндра. Предпочтительно, жатка включает в себя гидравлический плавающий контур, соединенный по текучей среде с каждым плавающим цилиндром. Предпочтительно, сельскохозяйственный виндроуэр включает в себя блок управления, обеспечивающий управляемое приведение в действие гидравлического плавающего контура. Предпочтительно, сельскохозяйственный виндроуэр включает в себя, по меньшей мере, один подъемный цилиндр, присоединенный между шасси транспортного средства и подъемной рамой, причем блок управления выполнен с возможностью работы со следованием рельефу грунта для управляемого приведения в действие каждого подъемного цилиндра для подъема и опускания жатки в зависимости от относительного расположения по вертикали основной рамы и подъемной рамы. Предпочтительно, сельскохозяйственный виндроуэр включает в себя кабину оператора, причем блок управления расположен в кабине оператора или на жатке. Предпочтительно, подъемная рама непосредственно соединяет жатку с шасси транспортного средства. Предпочтительно, подъемная рама шарнирно соединена с шасси транспортного средства. Согласно второму объекту настоящего изобретения создана жатка для уборки зерновых для использования в сельскохозяйственной уборочной машине, содержащая основную раму; подвеску, подвижно соединенную с основной рамой, причем подвеска выполнена с возможностью избирательной установки на одном из множества различным образом конфигурированных типов сельскохозяйственных уборочных машин; и плавающую систему жатки, встроенную в жатку, причем плавающая система жатки имеет, по меньшей мере, один плавающий цилиндр, присоединенный между основной рамой и подвеской, и датчик положения на жатке, указывающий относительное положение упомянутого плавающего цилиндра. Предпочтительно, подвеска включает в себя множество связующих звеньев, подвижно поддерживающих основную раму, причем множество связующих звеньев выполнено с возможностью избирательного соединения с одним из множества различным образом конфигурированных типов сельскохозяйственных уборочных машин. Предпочтительно, каждый плавающий цилиндр присоединен между основной рамой и соответствующим одним из множества связующих звеньев. Предпочтительно, подвеска выполнена с возможностью избирательной установки на виндроуэре или на комбайне. Предпочтительно, подвеска выполнена с возможностью избирательной установки на подъемной раме виндроуэра или на приемной камере молотилки комбайна. Предпочтительно, жатка содержит два плавающих цилиндра. Предпочтительно, жатка включает в себя гидравлический плавающий контур, соединенный по текучей среде с каждым плавающим цилиндром. Согласно третьему объекту настоящего изобретения создан сельскохозяйственный виндроуэр, содержащий шасси транспортного средства; подъемную раму, подвижно соединенную с шасси транспортного средства; жатку для уборки зерновых, соединенную с подъемной рамой, причем жатка включает в себя основную раму, встроенную плавающую систему жатки и гидравлический плавающий контур, соединенный по текучей среде с каждым плавающим цилиндром, при этом плавающая система жатки имеет, по меньшей мере, один плавающий цилиндр, соединенный с основной рамой; блок управления, обеспечивающий управляемое приведение в действие гидравлического плавающего контура; и, по меньшей мере, один подъемный цилиндр, присоединенный между шасси транспортного средства и подъемной рамой, причем блок управления выполнен с возможностью работы со следованием рельефу грунта для управляемого приведения в действие каждого подъемного цилиндра для подъема и опускания жатки в зависимости от относительного расположения по вертикали основной рамы и подъемной рамы. Далее настоящее изобретение будет описано более подробно со ссылкой на прилагаемые чертежи, на которых: фиг.1 - вид сбоку комбайна, демонстрирующий плавающую жатку, имеющую встроенную гидравлическую плавающую подвеску; фиг.2 - местный вид сбоку комбайна, демонстрирующий плавающую жатку, прикрепленную с передней стороны приемной камеры молотилки; фиг.3 - схематический вид динамической плавающей системы жатки, используемой в проиллюстрированной плавающей жатке; фиг.4 - схематический вид упругой плавающей системы жатки, используемой в проиллюстрированной плавающей жатке; фиг.5А - вид сбоку комбайна, работающего на ровном грунте с проиллюстрированной плавающей системой и плавающей жаткой; фиг.5В - вид сбоку комбайна, работающего на наклонном поднимающемся грунте с проиллюстрированной плавающей системой и плавающей жаткой; фиг.5С - вид сбоку комбайна, работающего на наклонном опускающемся грунте с проиллюстрированной плавающей системой и плавающей жаткой; фиг.6А - вид спереди комбайна, работающего на наклоненном вправо грунте с проиллюстрированной плавающей системой и плавающей жаткой; фиг.6В - вид спереди комбайна, работающего на наклоненном влево грунте с проиллюстрированной плавающей системой и плавающей жаткой; фиг.7 - схематический вид динамической системы следования рельефу жатки в сочетании с проиллюстрированной динамической плавающей системой и плавающей жаткой; фиг.8 - схематический вид динамической системы следования рельефу жатки в сочетании с проиллюстрированной упругой плавающей системой и плавающей жаткой; фиг.9А - вид сбоку комбайна, работающего на ровном грунте с проиллюстрированной динамической системой следования рельефу жатки и плавающей жаткой; фиг.9В - вид сбоку комбайна, работающего на наклонном поднимающемся грунте с проиллюстрированной динамической системой следования рельефу для первого случая; фиг.9С - вид сбоку комбайна, работающего на наклонном поднимающемся грунте с проиллюстрированной динамической системой следования рельефу для второго случая; фиг.9D - вид сбоку комбайна, работающего на наклонном опускающемся грунте с проиллюстрированной динамической системой следования рельефу для первого случая; фиг.9Е - вид сбоку комбайна, работающего на наклонном опускающемся грунте с проиллюстрированной динамической системой следования рельефу для второго случая; фиг.10 - вид в перспективе жатки, показанной на фиг.2, которая конфигурирована для избирательной установки на комбайн или на виндроуэр; фиг.11 - вид сбоку плавающей жатки с фиг.10, которая показана прикрепленной с передней стороны виндроуэра, показанного на фиг.10 (виндроуэр показан частично); фиг.12 - местный вид сзади жатки, показанной на фиг.10 и 11. На чертежах и, в частности, на фиг.1 показан самоходный комбайн 10, который обычно используют для уборки с поля различных зерновых культур. Бортовой двигатель приводит в действие комбайн 10, в то время как находящиеся в зацеплении с грунтом колеса 14 поддерживают и двигают машину. Оператор управляет комбайном с пульта оператора, расположенного в кабине 16 с передней стороны машины. Электронный блок 44 управления, принимающий команды от устройств ввода и датчиков оператора, управляет выполнением различных функций комбайна 10. Приемная камера 20 молотилки шарнирно крепится спереди комбайна 10, поддерживая жатку 22, установленную с возможностью отделения спереди приемной камеры 20 молотилки. Пара подъемных цилиндров 24 поддерживает и шарнирно соединяет приемную камеру 20 молотилки с комбайном 10, позволяя поднимать и опускать жатку 22 относительно грунта. Подъемные цилиндры 24 являются гидравлическими цилиндрами одинарного или двойного действия, соединенными с главным гидравлическим контуром 40 подъемным клапаном 42. Подъемный клапан 42 является гидравлическим клапаном с электрическим управлением, принимающим команды с блока 44 управления. В процессе уборочных работ комбайн 10 движется вперед по полю с жаткой 22, опущенной до рабочей высоты. Жатка 22 срезает и передает убранный материал в приемную камеру 20 молотилки, которая в свою очередь передает убранный материал в комбайн 10. Внутри комбайна молотильный и разделительный агрегаты 26 отделяют зерно от убранного материала и передают его в бункер 28 для зерна для временного хранения. Убранный материал за исключением зерна покидает комбайн 10 через заднюю часть. Разгрузочный шнек 30 передает зерно из бункера 28 для зерна в грузовик или другой прицеп для зерна с целью транспортировки или в другой приемный бункер для хранения. На фиг.2 показан вид сбоку комбайна 10, иллюстрирующий вариант реализации конструкции 50 с плавающей жаткой с полотенным транспортером. Жатка 50 включает в себя раму 52, имеющую обычную конструкцию, причем рама 52 поддерживает мотовило 54, режущий механизм 56 и полотенный транспортер 58. Плавающая система 60 подвески, отходящая от задней части рамы 52, обеспечивает первичную поддержку жатки 50 относительно приемной камеры 20 молотилки, в то время как отходящий вниз несущий элемент 62 служит для вторичной поддержки жатки 50 относительно грунта. В проиллюстрированном варианте реализации этот несущий элемент является опорной плитой 62, расположенной рядом с передней частью рамы 62, однако эта часть может также быть копирующим колесом (не показано). Система 60 подвески включает в себя подрамник 64, который крепится с возможностью отделения к приемной камере 20 молотилки, одно или более нижних связующих звеньев 66, одно или более верхних связующих звеньев 68, один или более плавающих цилиндров 70, гидравлический плавающий контур 72 и плавающий клапан 74. В проиллюстрированном варианте реализации применяются два параллельных нижних связующих звена 66, каждое из которых имеет первый конец 67, шарнирно прикрепленный рядом с нижней стороной подрамника 64. Каждое нижнее связующее звено 66 проходит вперед и имеет второй конец 67', шарнирно прикрепленный под рамой жатки 52. В проиллюстрированном варианте реализации используется одно верхнее связующее звено 68, имеющее первый конец 69, шарнирно прикрепленный рядом с верхней стороной подрамника 64. Верхнее связующее звено 68 проходит вперед и имеет второй конец 69', шарнирно прикрепленный над рамой 52 жатки. В проиллюстрированном варианте реализации два плавающих цилиндра 70, каждый из которых соответствует каждому нижнему связующему звену 66, поддерживают раму 52 относительно подрамника 64. Каждый плавающий цилиндр 70 имеет первый конец 71, прикрепленный к соответствующему ему нижнему связующему звену 66 рядом с первым концом 67 нижнего связующего звена. Каждый плавающий цилиндр 70 проходит вверх и имеет второй конец 71', прикрепленный к раме жатки 52. Каждый плавающий цилиндр 70 имеет гидравлический цилиндр одинарного действия, приспособленный для независимого возвратно-поступательного движения в рамках предельных значений. Каждый плавающий цилиндр 70 соединяется с гидравлическим плавающим контуром 72, который в свою очередь соединяется с основным гидравлическим контуром 40 посредством плавающего клапана 74. Плавающий клапан 74 приспособлен для избирательного добавления или удаления рабочей жидкости из гидравлического плавающего контура 72. Проиллюстрированный плавающий клапан 74 является гидравлическим клапаном с электронными управлением, которым управляет блок 44 управления. Блок 44 управления и плавающий клапан 74 располагаются по выбору либо на плавающей жатке 22, либо на комбайне 10. На фиг.3 и 4 показаны схематические виды, иллюстрирующие первый и второй варианты реализации 80 и 82 соответственно плавающих систем жатки, использующихся с плавающей жаткой 50. Первый вариант 80 реализации является динамической плавающей системой, в то время как второй вариант 82 реализации является упругой системой. Обе плавающие системы жатки служат для уменьшения кажущегося веса жатки 50, в то время как рабочая высота остается такой, что жатка 50 остается в контакте с грунтом, как показано на фиг.5А. При уменьшенном кажущемся весе жатка 50 легко скользит по грунту при движении комбайна 10 вперед во время операции уборки урожая, что позволяет жатке 50 автоматически следовать рельефу грунта в пределах, допускаемых системой подвески 60. При скольжении жатки 50 вперед грунт отжимает жатку 50 вверх при поднимающемся уклоне, проиллюстрированном на фиг.5 В, и сила тяжести тянет жатку 50 вниз при опускающемся уклоне, проиллюстрированном на фиг.5С. Кроме того, жатка 50 создает определенное колебание угла бокового наклона относительно комбайна 10, связанное с независимым возвратно-поступательным движением каждого плавающего цилиндра, проиллюстрированным на фиг.6А и 6В. В первом варианте 80 реализации датчик давления 84, сообщающийся с блоком 44 управления, подсоединяется к гидравлическому плавающему контуру 72 между плавающими цилиндрами 70 и плавающим клапаном 74. Имеющиеся внутри кабины 16 устройства для ввода команд оператора, сообщающиеся с блоком 44 управления, позволяют оператору контролировать действие плавающей системы в обоих вариантах реализации. Устройства для ввода команд оператора включают в себя устройство 86 приведения в действие плавающей системы и устройство 88 настройки плавающей системы, но не ограничиваются ими. Примеры устройств 86 приведения в действие плавающей системы включают в себя тумблеры или кнопки. Примеры устройств 88 настройки плавающей системы включают в себя аналоговые устройства набора кода или устройства цифрового ввода. Непоказанный на чертежах дополнительный отсечный клапан изолирует плавающие цилиндры 70 от гидравлического контура 40, позволяя обслуживать жатку 50. При наличии всех элементов первого варианта 80 реализации второй вариант 82 реализации дополнительно включает в себя накопитель 90, соединяющий гидравлический плавающий контур 72 между плавающими цилиндрами 70 и плавающим клапаном 74. Во время операции по уборке урожая с использованием любого варианта 80, 82 реализации оператор применяет устройство 86 приведения в действие плавающей системы для использования жатки 50 в плавающем режиме и может также использовать устройство 88 настройки плавающей системы для получения нужной реакции плавающей системы жатки. При использовании в процессе работы жатки в плавающем режиме блок 44 управления считывает показания устройства 88 настройки плавающей системы, указывая уровень опоры подвески, который оператор требует от плавающей системы 80, 82, например, в виде веса жатки или требующегося давления в гидравлическом плавающем контуре. Блок 44 управления определяет затем целевое давление в гидравлическом плавающем контуре, достаточное для получения заданной опоры подвески. Для определения целевого давления в гидравлическом плавающем контуре 72 блок управления может использовать данные, коррелирующие значения давления в гидравлическом плавающем контуре 72 со значениями опоры подвески. Эти коррелированные данные о давлении могут варьироваться от жатки к жатке в зависимости от веса жатки и конфигурации подвески и могут быть выведены из таблиц, формул или показаний датчика. Блок 44 управления может считывать коррелированные данные из запоминающего устройства на жатке 50. Информация может храниться также в запоминающем устройстве, встроенном в комбайн, причем блок 44 управления выбирает нужные данные после определения типа жатки, установленной на комбайне 10. Как вариант, блок 44 управления может определять целевое давление для гидравлического плавающего контура 72 путем считывания показаний датчика 82 давления в гидравлическом плавающем контуре 72 в то время, когда жатка 50 находится на высоте, при которой опорные плиты не соприкасаются с грунтом. При такой высоте подвеска поддерживает весь вес жатки, и давление в гидравлическом плавающем контуре 72 указывает базовое давление, при котором плавающие цилиндры 70 полностью поддерживают жатку 50. Затем блок 44 управления определяет целевое давление путем умножения базового давления на коэффициент, соответствующий опоре подвески, указанной устройством 88 настройки плавающей системы. В первом варианте 80 реализации блок 44 управления непрерывно сравнивает целевое давление с показаниями датчика 84 давления, указывающими давление в гидравлическом плавающем контуре 72, выдавая команду на плавающий клапан 74 о добавлении или удалении рабочей жидкости из гидравлического плавающего контура 72 с целью поддержания показаний датчика 84 давления на уровне, равном целевому давлению. Таким образом, блок 44 управления непрерывно поддерживает целевое давление в гидравлическом плавающем контуре 72, когда плавающие цилиндры 70 выполняют возвратно-поступательные движения над меняющимся рельефом, обеспечивая постоянную поддержку жатки 50 плавающей подвеской 60 при перемещении комбайна по полю. Для изменения реакции жатки при самоустановке в процессе работы жатки в плавающем режиме оператор может дополнительно манипулировать устройством 88 настройки плавающей системы, не отключая при этом плавающую систему. Блок 44 управления непрерывно следит за изменениями в устройстве 88 настройки плавающей системы, соответственно определяя и вводя новые значения целевого давления. Плавающая система жатки продолжает работать до тех пор, пока оператор не отключит устройство 86 приведения в действие плавающей системы. Во втором варианте 82 реализации блок 44 управления только первоначально сравнивает целевое давление с показаниями датчика 84 давления, указывающими давление в гидравлическом плавающем контуре 72, выдавая команду на плавающий клапан 74 о добавлении или удалении рабочей жидкости из гидравлического плавающего контура 72 до тех пор, пока показания датчика 84 давления не придут в соответствие с целевым давлением. После вывода на целевое давление гидравлический плавающий контур 72 запирают, и накопитель 90 служит для поддержания целевого давления в гидравлическом плавающем контуре 72, когда плавающие цилиндры 70 выполняют возвратно-поступательные движения над меняющимся рельефом. Для изменения реакции жатки при самоустановке в процессе работы жатки в плавающем режиме оператор может дополнительно манипулировать устройством 88 настройки плавающей системы, не отключая при этом плавающую систему. Блок 44 управления непрерывно следит за изменениями в устройстве 88 настройки плавающей системы, соответственно определяя и вводя новые значения целевого давления. Плавающая система жатки продолжает работать до тех пор, пока оператор не отключит устройство 86 приведения в действие плавающей системы. На фиг.7 и 8 схематически проиллюстрированы первый и второй варианты реализации 92, 94 соответственно системы следования рельефу, применяемой с плавающей жаткой 50. Обе системы служат для расширения возможностей следования рельефу плавающей системы жатки 80, 82 путем динамического приведения в действие подъемных цилиндров 25 в ответ на возвратно-поступательное движение плавающих цилиндров 70. Когда грунт отжимает жатку 50 вверх на подъемах, как показано на фиг.9В, система 92, 94 следования рельефу заставляет подъемные цилиндры 94 поднять жатку 50 вверх, так что плавающие цилиндры 70 возвращаются в положение в пределах допуска, показанное на фиг.9С. Когда сила тяжести тянет жатку 50 вниз на спусках, как показано на фиг.9D, система 92, 94 следования рельефу заставляет подъемные цилиндры 94 опустить жатку 50 вниз, так что плавающие цилиндры 70 снова возвращаются в положение в пределах допуска, показанное на фиг.9Е. Первый вариант 92 реализации системы следования рельефу применяется в динамической плавающей системе 80 жатки, в то время как второй вариант 94 реализации системы следования рельефу применяется в упругой плавающей системе 82 жатки. В обоих вариантах реализации сообщающийся с блоком 44 управления датчик 96 положения в форме потенциометра указывает относительное возвратно-поступательное движение каждого цилиндра. В проиллюстрированных вариантах реализации каждый датчик 96 положения прикрепляется к соответствующему нижнему связующему звену 66 и раме 52. Находящиеся в кабине 16 устройства ввода команд оператора, связанные с блоком 44 управления, позволяют оператору контролировать действие системы 92, 94 следования рельефу. Устройства ввода команд оператора включают в себя устройство 98 выдачи команды на подъем и устройство 100 приведения системы в действие, но не ограничиваются ими. Примеры устройств 100 приведения системы в действие включают в себя тумблеры или кнопки. Примеры устройств 98 выдачи команды на подъем включают в себя рычаги управления или джойстики. Во время операции уборки урожая с использованием любого из вариантов 92 или 94 реализации оператор манипулирует устройством 98 выдачи команды на подъем, заставляя блок 44 управления дать команду на подъемные цилиндры 24 об опускании жатки 50 до тех пор, пока жатка не коснется грунта. Оператор затем применяет устройство 100 приведения системы в действие для работы в режиме следования рельефу. После приведения в действие блок 44 управления непрерывно считывает показания обоих датчиков 96 положения, вычисляет среднее значение показаний датчика 96 давления и затем выдает команду на подъемный клапан 42 о добавлении или удалении рабочей жидкости из подъемных цилиндров 24 до тех пор, пока среднее значение показаний датчика 96 положения не покажет, что плавающие цилиндры 70 находятся в положении в пределах допуска. Таким образом, блок 44 управления непрерывно вносит поправку в высоту жатки 50 над меняющимся рельефом, устанавливая плавающую жатку 50 для оптимального функционирования плавающей системы 80, 82 жатки при перемещении комбайна 10 по полю. Система 92, 94 следования рельефу продолжает функционировать до тех пор, пока оператор не отключит устройство 100 приведения системы в действие или пока оператор манипулирует устройством 98 выдачи команды на подъем с целью подъема или опускания жатки 50. На фиг.10 показан полный вид, иллюстрирующий плавающую жатку 50, показанную на фиг.2, в соединении с комбайном 10 (нижняя иллюстрация на фиг.10), и иллюстрирующий также, каким образом плавающая жатка 50 приспосабливается к соединению с различными видами сельскохозяйственной уборочной машины, такими как виндроуэр 110. Выбор одной плавающей жатки 50, которая может быть соединена с различными видами уборочных машин (например, комбайном или виндроуэром), позволяет уменьшить эксплуатационные затраты. Подобно комбайну 10 виндроуэр 110 включает в себя шасси 112 транспортного средства, которое поддерживает корпус 114 транспортного средства и кабину 116 оператора. Виндроуэр 110 обычно включает в себя, по меньшей мере, один бортовой электронный блок управления (ЭБУ) 118, обычно расположенный, как показано, в кабине 116. Виндроуэр 110 включает в себя подъемную раму 120, шарнирно установленную на шасси 112 транспортного средства и соединенную с возможностью отделения с плавающей жаткой 50, как будет описано более подробно далее (фиг.10 и 11). Подъемный цилиндр, присоединенный между шасси 112 транспортного средства и подъемной рамой 120, используют для перемещения жатки 50 на выбранную рабочую или транспортировочную высоту. ЭБУ 118 на борту виндроуэра включает в себя логическую схему управления, предназначенную для управления электронными и гидравлическими системами, связанными с плавающей системой жатки для жатки 50. Ряд гидравлических шлангов 124, помещенных на жатке 50, соединяется с гидролинией виндроуэра 110 для выполнения различных функций гидравлики (см. фиг.12). Механический привод 126, отходящий в поперечном направлении от подъемной рамы 120, соединяется с ведомыми механическими компонентами (например, режущим механизмом) жатки 50 известным образом. В варианте реализации плавающей жатки 50, соединенной, как показано выше, с комбайном 10, подрамник 64 описан как являющийся частью подвески 60, прикрепленный с возможностью отделения к переднему концу приемной камеры 20 молотилки. Подрамник 64 включает в себя пару нижних соединительных устройств 102 (одно из которых показано на фиг.2 и 10) и верхнее соединительное устройство 104. Каждое нижнее соединительное устройство 102 соединяют обычным способом быстрого соединения с наружным концом соответствующего нижнего связующего звена 66. Верхнее соединительное устройство 104 соединяют с наружным концом верхнего звена 68. Верхнее звено 68 может быть фиксированным звеном, звеном, регулируемым вручную или регулируемым гидравлическим цилиндром, которое скреплено штифтом с верхним соединительным звеном 104. Таким образом, подрамник 64 крепится к нижним связующим звеньям 66 и верхнему связующему звену 68 способом, очень сходным с тем, которым трехопорное прицепное устройство соединяют с приспособлением позади трактора. При отсоединении жатки 50 от комбайна 10 подрамник 64 остается установленным на приемной камере 20 молотилки. Аналогичным образом подъемная рама 120 виндроуэра 110 включает в себя нижнее соединительное устройство 128 и верхнее соединительное устройство 130. Каждое нижнее соединительное устройство 128 соединяют обычным способом быстрого соединения с наружным концом соответствующего нижнего связующего звена 66. Верхнее соединительное устройство 130 соединяют с наружным концом верхнего звена 68. При отсоединении жатки 50 от виндроуэра 110 подъемная рама 120 остается шарнирно установленной на шасси 112 транспортного средства. Подъемная рама 120 обладает преимуществом простого и непосредственного взаимного соединения жатки 50 с шасси 112 транспортного средства виндроуэра 110. Можно также использовать переходный подрамник между подъемной рамой 120 и жаткой 50 подобно подрамнику 64, описанному выше в отношении вариантов реализации, показанных на фиг.1-9. Подрамник должен оставаться прикрепленным к жатке 50 будучи отсоединенным от подъемной рамы 120 и должен обладать преимуществом удержания верхнего связующего звена 68 с фиксированной ориентацией для более легкого последующего крепления к подъемной раме 120. Виндроуэры известной конструкции могут включать в себя плавающую систему жатки, которая установлена на самой жатке, которая несет ее на себе. Путем помещения плавающей системы на жатку, а не на рабочий механизм исключается необходимость в применении отдельных плавающих систем, предназначенных по отдельности для комбайна или виндроуэра, что способствует уменьшению эксплуатационных затрат, дублирования и т.п. Наряду с теми же линиями логическая схема управления жатки 50 описана выше как находящаяся под управлением электронного блока 44 управления (см. фиг.1) или 118 (см. фиг.10), находящихся на борту рабочего механизма. Однако существует также возможность снабдить жатку 50 встроенным электронным блоком управления (не показан) с логической схемой управления, предназначенной для управления электронными и гидравлическими системами, связанными с плавающей системой жатки. Преимущество такого варианта заключается в отсутствии необходимости программирования электронного блока управления на борту рабочего механизма и в уменьшении технологической нагрузки на электронный блок управления, находящийся на борту рабочего механизма. Конечно, электронный блок управления, находящийся на жатке, может быть приспособлен для того, чтобы сообщаться с электронным блоком управления на рабочем механизме или по проводам, или беспроводным способом и т.д. Когда жатку 50 соединяют с виндроуэром 110, понятно, что жатка 50 может быть приспособлена для того, чтобы включать в себя все признаки и функции, описанные выше в отношении вариантов реализации, показанных на фиг.1-9. Например, при использовании с виндроуэром 110 жатка 50 может включать в себя динамическую или упругую плавающую систему (см. фиг.3 и 4), систему следования рельефу (см. фиг.7 и 8) и т.д. После прочтения описания предпочтительного варианта реализации будет очевидна возможность внесения различных модификаций без отступления от объема изобретения, определяемого прилагаемой формулой изобретения. Формула изобретения1. Сельскохозяйственный виндроуэр, содержащий:шасси транспортного средства;подъемную раму, подвижно соединенную с шасси транспортного средства, и жатку для уборки зерновых, соединенную с подъемной рамой, причем жатка включает в себя основную раму и встроенную плавающую систему жатки, а плавающая система жатки имеет, по меньшей мере, один плавающий цилиндр, соединенный с основной рамой, и датчик положения на жатке, указывающий относительное положение упомянутого плавающего цилиндра. 2. Сельскохозяйственный виндроуэр по п.1, в котором жатка включает в себя подвеску, подвижно поддерживающую основную раму на подъемной раме, причем каждый плавающий цилиндр присоединен между подвеской и основной рамой. 3. Сельскохозяйственный виндроуэр по п.2, в котором подвеска включает в себя множество связующих звеньев, подвижно поддерживающих основную раму, причем плавающий цилиндр присоединен между основной рамой и соответствующим одним из множества связующих звеньев. 4. Сельскохозяйственный виндроуэр по п.1, содержащий два плавающих цилиндра. 5. Сельскохозяйственный виндроуэр по п.1, в котором жатка включает в себя гидравлический плавающий контур, соединенный по текучей среде с каждым плавающим цилиндром. 6. Сельскохозяйственный виндроуэр по п.5, который включает в себя блок управления, обеспечивающий управляемое приведение в действие гидравлического плавающего контура. 7. Сельскохозяйственный виндроуэр по п.6, который включает в себя, по меньшей мере, один подъемный цилиндр, присоединенный между шасси транспортного средства и подъемной рамой, причем блок управления выполнен с возможностью работы со следованием рельефу грунта для управляемого приведения в действие каждого подъемного цилиндра для подъема и опускания жатки в зависимости от относительного расположения по вертикали основной рамы и подъемной рамы. 8. Сельскохозяйственный виндроуэр по п.6, который включает в себя кабину оператора, причем блок управления расположен в кабине оператора или на жатке. 9. Сельскохозяйственный виндроуэр по п.1, в котором подъемная рама непосредственно соединяет жатку с шасси транспортного средства. 10. Сельскохозяйственный виндроуэр по п.9, в котором подъемная рама шарнирно соединена с шасси транспортного средства. 11. Жатка для уборки зерновых для использования в сельскохозяйственной уборочной машине, содержащая: основную раму;подвеску, подвижно соединенную с основной рамой, причем подвеска выполнена с возможностью избирательной установки на одном из множества различным образом конфигурированных типов сельскохозяйственных уборочных машин, и плавающую систему жатки, встроенную в жатку, причем плавающая система жатки имеет, по меньшей мере, один плавающий цилиндр, присоединенный между основной рамой и подвеской, и датчик положения на жатке, указывающий относительное положение упомянутого плавающего цилиндра. 12. Жатка по п.11, в которой подвеска включает в себя множество связующих звеньев, подвижно поддерживающих основную раму, причем множество связующих звеньев выполнено с возможностью избирательного соединения с одним из множества различным образом конфигурированных типов сельскохозяйственных уборочных машин. 13. Жатка по п.12, в которой каждый плавающий цилиндр присоединен между основной рамой и соответствующим одним из множества связующих звеньев. 14. Жатка по п.11, в которой подвеска выполнена с возможностью избирательной установки на виндроуэре или на комбайне. 15. Жатка по п.11, в которой подвеска выполнена с возможностью избирательной установки на подъемной раме виндроуэра или на приемной камере молотилки комбайна. 16. Жатка по п.11, содержащая два плавающих цилиндра. 17. Жатка по п.11, которая включает в себя гидравлический плавающий контур, соединенный по текучей среде с каждым плавающим цилиндром. 18. Сельскохозяйственный виндроуэр, содержащий шасси транспортного средства, подъемную раму, подвижно соединенную с шасси транспортного средства, жатку для уборки зерновых, соединенную с подъемной рамой, причем жатка включает в себя основную раму, встроенную плавающую систему жатки и гидравлический плавающий контур, соединенный по текучей среде с каждым плавающим цилиндром, при этом плавающая система жатки имеет, по меньшей мере, один плавающий цилиндр, соединенный с основной рамой, блок управления, обеспечивающий управляемое приведение в действие гидравлического плавающего контура, и, по меньшей мере, один подъемный цилиндр, присоединенный между шасси транспортного средства и подъемной рамой, причем блок управления выполнен с возможностью работы со следованием рельефу грунта для управляемого приведения в действие каждого подъемного цилиндра для подъема и опускания жатки в зависимости от относительного расположения по вертикали основной рамы и подъемной рамы. Популярные патенты: 2297128 Способ мелиорации солонцовых почв в условиях орошения ... дать 5-6 т/га соломы.Уборку озимых культур на зерно осуществляют одновременно с измельчением соломы при помощи приспособления ПУН-5, установленного на комбайне, и разбросом измельченной соломы по полю.Затем на слой соломы вносят азотные удобрения, в качестве которых используют, например, аммиачную селитру в количестве 10 кг на тонну соломы и расчетную дозу мелиоранта, в качестве которого используют аммонизированный фосфогипс в форме полугидрата в количестве 6 т/га.Затем солому, азотные удобрения и мелиорант заделывают в поверхностный слой почвы дискованием с использованием тяжелых дисковых орудий. После этого осуществляют вспашку на глубину 28-30 см, посев суданской травы и ее ... 2019938 Рабочий орган почвообрабатывающей машины ... с передней заточкой, режущая кромка ножа изготовлена по винтовой кривой с постоянным углом подъема, расположенной на конической поверхности с вершиной конуса, обращенной вверх, и передним нижним изогнутым концом направлена вперед в направлении вращения ротора, а затылочная (наружная) грань ножа повернута относительно перпендикуляра к радиусу вращения до центра на угол 15о< <45. Сопоставительный анализ с прототипом позволяет сделать вывод, что конструктивно предлагаемое техническое решение ново: режущая кромка ножа изготовлена по винтовой кривой с постоянным углом подъема, расположенной на конической поверхности с вершиной конуса, обращенной вверх, и передним нижним ... 2406293 Способ определения содержания водорастворимых углеводов и крахмала из одной навески ... 0,7 см3 уксуснокислого свинца и 1,4 см насыщенного раствора Na2SO4 , доводят до метки дистиллированной водой. Из колбы берут 3 см раствора в пробирку, приливают 3 см насыщенного раствора пикриновой кислоты и 3 см3 20%-ного раствора Na2CO 3, перемешивают, выдерживают 30 мин в кипящей водяной бане. Охлаждают и переносят в мерную колбу на 50 см3. Раствор, полученный таким образом, используют как раствор сравнения при колориметрировании.Расчет: где С - количество глюкозы по графику, мг; Р - разведение (100/3); Н - навеска материала, г. Определение суммы водорастворимых углеводовВ сухую пробирку пипеткой берут 1 см3 надосадочной жидкости, полученной после центрифугирования, ... 2232490 Машина для обработки почвы ... залемешного пространства с возможностью вращения сопротивлением почвы или уравновешивания реакции почвы в режиме реактора-ролика заменителя полевой доски. Машина обеспечивает преобразование догружателей колес трактора в разгружатели колес и догружатели дисковых и катковых рабочих органов. Такое конструктивное выполнение позволяет повысить эффективность обработки почвы в любой зоне. 6 з.п. ф-лы, 129 ил. Изобретение относится к сельскохозяйственному машиностроению, к машинам для обработки почвы и грунтов, может быть использовано для реализации новых технологий и способов использования.Известна машина для обработки почвы, содержащая энергетический и технологический модули, ... 2129787 Инсектицидная композиция ... настоящего изобретения является новая инсектицидная композиция. Другим объектом настоящего изобретения является инсектицидная композиция, которая имеет стабильный инсектицидный эффект в течение длительного периода времени в качестве инсектицидной композиции для горячего окуривания. Дополнительным объектом настоящего изобретения является способ борьбы с насекомыми-паразитами посредством горячего окуривания вышеуказанной композицией. Другие объекты и преимущества настоящего изобретения становятся понятыми из последующего описания. Настоящее изобретение предусматривает инсектицидную композицию, содержащую бенфлутрин в качестве активного инсектицидного ингредиента и MGK 264; ... |
Еще из этого раздела: 2414113 Способ и комплекс для обработки зерна, семян или плодоовощной продукции озоном 2423036 Биоконтейнер для посадки растений 2407280 Устройство и способ для осушения воздуха в теплице и теплица 2080765 Комбайн для уборки овощей 2280351 Установка для скашивания сорной растительной массы с берм и откосов канала 2241322 Навесное устройство трактора 2444881 Конвейер для проращивания зерна 2464765 Сепарирующее устройство корнеклубнеуборочной машины 2163758 Способ и устройство контроля количества меда в улье 2407282 Способ выращивания корнесобственных саженцев винограда и машина для его осуществления |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||
