Способ управления технологическим процессом уборочной машины и система для его осуществленияПатент на изобретение №: 2447640 Автор: Ефанов Василий Васильевич (RU) Патентообладатель: Ефанов Василий Васильевич (RU) Дата публикации: 20 Апреля, 2012 Начало действия патента: 8 Декабря, 2010 Адрес для переписки: 394007, г.Воронеж, ул. Ильича, 59, кв.165, В.В. Ефанову Изображения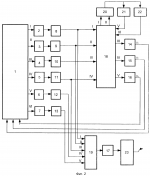  Группа изобретений относится к сельскому хозяйству и может быть использована при уборке сельскохозяйственных культур. При управлении технологическим процессом уборочной машины измеряют параметры состояния убираемой культуры, поля и функционирования рабочих органов уборочной машины. Затем подают сигналы управления на элементы регулирования рабочих органов уборочной машины, определяют координаты ее положения на поле в каждый момент времени и формируют сигналы управления на основании измеренных на предыдущем гоне величин параметров в соответствии с координатами положения уборочной машины на поле и временем запаздывания элементов регулирования рабочих органов. Дополнительно определяют прогнозируемое время, необходимое для уборки урожая с поля, определяют прогнозируемые значения величины урожая с поля, формируют карту урожайности на основе фиксации массы убранного зерна и координат положения уборочной машины. Далее определяют прогнозируемое время и координаты до очередной выгрузки урожая и заправки топлива, а также осуществляют выдачу информации водителям транспортных средств о прогнозируемом времени и координатах до очередной выгрузки урожая и заправки топлива. Изобретения обеспечивают повышение информативности уборочного процесса. 2 н. и 1 з.п. ф-лы, 2 ил. Изобретение относится к сельскому хозяйству, в частности к автоматическому управлению процессом уборки сельхозкультур. Известен способ управления технологическим процессом уборочной машины, включающий измерение величин параметров состояния убираемой культуры, поля и функционирования рабочих органов сельхозмашины и последующую подачу сигналов управления на элементы регулирования рабочих органов уборочной машины, определение координаты положения сельхозмашины на поле в каждый момент времени, формирование сигналов управления на основании измеренных на предыдущем гоне величин параметров в соответствии с координатами положения сельхозмашины на поле и временем запаздывания элементов регулирования рабочих органов [1] (Описание изобретения к авторскому свидетельству, SU Известна система управления технологическим процессом уборочной машины, которая состоит из объекта управления уборочной машины, датчиков, формирующих сигналы, пропорциональные параметрам технологического состояния поля и убираемой сельхозкультуры, техпроцесса, выполняемого уборочной машиной, датчика пройденного пути с начала прохода, первого, второго, третьего, четвертого, пятого, шестого, седьмого буферных каскадов, вычислительного устройства; постоянного запоминающего устройства, оперативного запоминающего устройства, устройства управления работой вычислительного устройства, причем первый, второй, третий, четвертый выходы объекта управления уборочной машины, через первый, второй, третий датчики которые формируют сигналы, пропорциональные параметрам технологического состояния поля и убираемой сельхозкультуры, техпроцесса, выполняемого уборочной машиной, датчик пути и через первый, второй, третий и четвертый буферные каскады соединены с первым, вторым, третьим и четвертым входами вычислительного устройства, первый, второй, третий, четвертый, пятый выходы которого соединены соответственно с первым и вторым входами устройства управления и через пятый, шестой и седьмой буферные каскады с первым, вторым и третьим входами объекта управления, выход устройства управления работой вычислительного устройства через постоянное и оперативное запоминающие устройства соединен соответственно с пятым и шестым входами вычислительного устройства (Описание изобретения к авторскому свидетельству, SU Недостатком данных способа и системы является заниженная информативность, обусловленная отсутствием информации о прогнозируемых значениях времени уборки и урожае с поля, об электронной карте урожайности, а также отсутствием информации для водителей транспортных средств о прогнозируемом времени и координатах уборочной машины до следующей выгрузки убираемой сельхозкультуры и заправки топлива. Технической задачей изобретения является повышения информативности за счет определения информации о прогнозируемых значениях времени уборки и урожае с поля, об электронной карте урожайности, а также определения информации для водителей транспортных средств о прогнозируемом времени и координатах уборочной машины до следующей выгрузки убираемой сельхозкультуры и очередной заправки топлива. Решение технической задачи достигается тем, что в способе управления технологическим процессом уборочной машины, включающем измерение величин параметров состояния убираемой культуры, поля и функционирования рабочих органов сельхозмашины и последующую подачу сигналов управления на элементы регулирования рабочих органов уборочной машины, определение координат положения сельхозмашины на поле в каждый момент времени, формировании сигналов управления на основании измеренных на предыдущем гоне величин параметров в соответствии с координатами положения сельхозмашины на поле и временем запаздывания элементов регулирования рабочих органов, дополнительно определяют прогнозируемое время, необходимое для уборки урожая с поля, определяют прогнозируемые значения величины урожая с поля, формируют карту урожайности на основе фиксации массы убранного зерна и координат положения уборочной машины, определяют прогнозируемое время и координаты поля до очередной выгрузки урожая и заправки топлива, осуществляют выдачу информации водителям транспортных средств о прогнозируемом времени и координатах поля до очередной выгрузки урожая и заправки топлива. Предлагаемый способ реализуется в системе управления технологическим процессом уборочной машины, содержащей объект управления уборочной машины, датчики, формирующие сигналы, пропорциональные параметрам технологического состояния поля и убираемой сельхозкультуры, техпроцесса, выполняемого уборочной машиной, датчик пройденного пути, первое, второе, третье, четвертое, пятое, шестое, седьмое буферные каскады, вычислительное устройство; постоянное запоминающее устройство, оперативное запоминающее устройство, устройство управления работой вычислительного устройства, причем первый, второй, третий, четвертый выходы объекта управления уборочной машины соединены с входами первого, второго, третьего датчиков, выходы которых и датчика пути соединены через первый, второй, третий и четвертый буферные каскады с первым, вторым, третьим и четвертым входами первого вычислительного устройства, первый, второй, третий, четвертый, пятый выходы которого соединены соответственно с первым и вторым входами устройства управления и через пятый, шестой и седьмой буферные каскады с первым, вторым и третьим входами объекта управления, выход устройства управления работой вычислительного устройства через постоянное и оперативное запоминающие устройства соединен соответственно с пятым и шестым входами первого вычислительного устройства, в систему дополнительно введены датчик навигации с восьмым буферным каскадом, датчик расхода топлива с девятым буферным каскадом, второе вычислительное устройство с десятым буферным каскадом и передающее устройство, при этом выходы первого, второго, четвертого, восьмого и девятого буферных каскадов соединены соответственно с первым, вторым, третьим, четвертым и пятым входами второго вычислительного устройства, выход которого через десятый буферный каскад соединен с входом передающего устройства, выход которого является выходом системы управления технологическим процессом уборочной машины. Новыми признаками, обладающими существенными отличиями по способу, является следующая совокупность действий. 1. Определяют прогнозируемое время, необходимое для уборки урожая с поля. 2. Определяют прогнозируемые значения величины урожая с поля. 3. Формируют карту урожайности на основе фиксации массы убранного зерна и координат положения уборочной машины. 4. Определяют прогнозируемое время и координаты до очередной выгрузки урожая и заправки топлива. 5. Осуществляют выдачу информации водителям транспортных средств о прогнозируемом времени и координатах до очередной выгрузки урожая и заправки топлива. Существенными элементами по системе являются дополнительно введенные датчик навигации с восьмым буферным каскадом, датчик расхода топлива с девятым буферным каскадом, второе вычислительное устройство с десятым буферным каскадом, передающее устройство и связи между новыми и старыми элементами. На фиг.1 представлен маршрут движения уборочной машины по полю; на фиг.2 приведена блок-схема системы автоматического управления технологическим процессом уборочной машины, где: 1 - объект управления уборочной машины; 2, 3, 4 - датчики, формирующие сигналы, пропорциональные параметрам технологического состояния поля и убираемой сельхозкультуры, техпроцесса, выполняемого уборочной машиной; 5 - датчик пройденного пути с начала прохода; 6 - датчик навигации, 7 - датчик расхода топлива, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17 - буферные каскады; 18, 19 - вычислительные устройства; 20 - устройство управления работой вычислительного устройства; 21 - запоминающее устройство; 22 - оперативное запоминающее устройство; 23 - передающее устройство. Датчики 2, 3, 4 формируют сигналы, пропорциональные параметрам технологического состояния поля и убираемой сельхозкультуры, техпроцесса, выполняемого уборочной машиной, и состояния агрегатов. Датчик 5 выдает информацию о пройденном пути с начала прохода гона уборочной машины. Датчик 6 навигации определяет координаты нахождения уборочной машины через систему ГЛОНАСС. Датчик 7 определяет расход топлива уборочной машины. Буферные каскады 8, 9, 10, 11, 12, 13 согласуют работу датчиков с вычислительными устройствами 18 и 19. Вычислительные устройства 18, 19 выполняют обработку информации, полученную от датчиков, по программе, находящейся в постоянном запоминающем устройстве 21. Информация, полученная от датчиков, и сигналы управления (результат обработки информации по программе) хранятся в оперативном запоминающем устройстве (ОЗУ) 22. Способ управления технологическим процессом уборочной машины реализуется следующим образом. При первом проходе по полю уборочной машиной производится измерение параметров, характеризующих состояние убираемого поля, сельхозкультуры, техпроцесса обработки культуры, состояние и режимы работы агрегатов машины, пройденный путь с начала прохода. Эта информация, поступающая с соответствующих датчиков (например, с датчиков 2, 3, 4, 5), записывается в оперативное запоминающее устройство 22. По мере накопления данных вычислительное устройство 18 производит обработку этой информации по программе, и результат помещается в ОЗУ 22, привязывая их к расстоянию, пройденному уборочной машиной. Таким образом, при первом проходе происходит измерение и накопление всей необходимой информации и ее обработка вычислительным устройством для получения управляющих сигналов. При втором проходе реализуется управление уборочной машиной и ее агрегатами по сигналам управления U1, U2, U3, выдаваемым из оперативного запоминающего устройства 22 в соответствии с расстоянием, пройденным уборочной машиной с начала второго прохода. Одновременно при втором проходе производится измерение и запись новой информации и ее обработка по программе. Таким образом, подготавливаются управляющие сигналы для последующего прохода. Далее процесс работы устройства повторяется. Определение дополнительной информации о прогнозируемых значениях времени уборки и урожае с поля, об электронной карте урожайности, а также информации для водителей транспортных средств о прогнозируемом времени и координатах уборочной машины до очередной выгрузки убираемой сельхозкультуры и заправки топлива выполняется в вычислителе 19. Входные сигналы на вычислитель 19 поступают с выходов датчиков 2 и 3, датчика 5 пройденного пути, датчика 6 навигации и датчика 7 расхода топлива. Алгоритм функционирования второго вычислителя заключается в: - определении пройденного пути уборочной машины при первом проходе (см. фиг.1) в соответствии с выражением: - определение координат нахождения уборочной машины в момент начала уборки урожая A0 и в момент окончание первого прохода уборочной машины An, осуществляется на основе использования датчика навигации спутниковой системы ГЛОНАСС; - определении скорости перемещения уборочной машины при первом проходе в соответствии с выражением: - определении количества необходимых прогонов для уборки урожая на данном поле в виде выражения - фиксации расхода топлива (m1) после первого прохода уборочной машиной и осуществления ею поворота на начало второго прохода; - определении прогнозируемых координат и времени до очередной заправки топлива в соответствии с выражением: - определении прогнозируемого времени до очередной заправки топлива в соответствии с выражением - определении прогнозируемых координат до очередной выгрузки убираемой сельхозкультуры в соответствии с выражением: - определении прогнозируемого времени до очередной выгрузки убираемой сельхозкультуры в соответствии с выражением - фиксации времени выполнения операций выгрузки зерна и заправки уборочной машины (tвыг., tзап.), с; - определении прогнозируемого времени, необходимого для уборки урожая в соответствии с выражением: Tпр.=T1 +T2+tвыг.+tзап., где T1 - прогнозируемое время при осуществлении всех проходов поля уборочной машиной, T2 - прогнозируемое время при осуществлении поворотов уборочной машины с одного прохода до другого, t выг., tзап. - время выгрузки и заправки уборочной машины; - определении прогнозируемого урожая поля в соответствии с выражением: Gобщ.=nG1, где n - количество прогонов, G1 - количество убираемой сельхозкультуры после первого прохода и выполнения маневра поворота уборочной машины, кг; - формировании карты урожайности на основе фиксации массы убранного зерна и координат положения уборочной машины. Выдача информации водителям транспортных средств о времени и прогнозируемых координатах до очередной выгрузки убираемой сельхозкультуры и загрузки топлива осуществляется передающим устройством 23. Формула изобретения1. Способ управления технологическим процессом уборочной машины, включающий измерение величин параметров состояния убираемой культуры, поля и функционирования рабочих органов сельхозмашины и последующую подачу сигналов управления на элементы регулирования рабочих органов уборочной машины, определение координаты положения сельхозмашины на поле в каждый момент времени, формирование сигналов управления на основании измеренных на предыдущем гоне величин параметров в соответствии с координатами положения сельхозмашины на поле и временем запаздывания элементов регулирования рабочих органов, отличающийся тем, что дополнительно определяют прогнозируемое время, необходимое для уборки урожая с поля, определяют прогнозируемые значения величины урожая с поля, формируют карту урожайности на основе фиксации массы убранного зерна и координат положения уборочной машины, определяют прогнозируемое время и координаты до очередной выгрузки урожая и заправки топлива, осуществляют выдачу информации водителям транспортных средств о прогнозируемом времени и координатах до очередной выгрузки урожая и заправки топлива. 2. Система управления технологическим процессом уборочной машины содержит объект управления уборочной машины, датчики, формирующие сигналы, пропорциональные параметрам технологического состояния поля и убираемой сельхозкультуры, техпроцесса, выполняемого уборочной машиной, датчик пройденного пути, первое, второе, третье, четвертое, пятое, шестое, седьмое буферных каскадов вычислительное устройство; постоянное запоминающее устройство, оперативное запоминающее устройство, устройство управления работой вычислительного устройства, причем первый, второй, третий, четвертый выходы объекта управления уборочной машины соединены с входами первого, второго, третьего датчиков, выходы которых и выход датчика пути соединены через первый, второй, третий и четвертый буферные каскады с первым, вторым, третьим и четвертым входами первого вычислительного устройства, первый, второй, третий, четвертый, пятый выходы которого соединены соответственно с первым и вторым входами устройства управления вычислительного устройства и через пятый, шестой и седьмой буферные каскады с первым, вторым и третьим входами объекта управления, выход устройства управления работой вычислительного устройства через постоянное и оперативное запоминающие устройства соединен соответственно с пятым и шестым входами первого вычислительного устройства, отличающаяся тем, что дополнительно введены датчик навигации с восьмым буферным каскадом, датчик расхода топлива с девятым буферным каскадом, второе вычислительное устройство с десятым буферным каскадом и передающее устройство, при этом выходы первого, второго, четвертого, восьмого и девятого буферных каскадов соединены соответственно с первым, вторым, третьим, четвертым и пятым входами второго вычислительного устройства, выход которого через десятый буферный каскад соединен с входом передающего устройства, выход которого является выходом системы управления технологическим процессом уборочной машины. 3. Система по п.2, отличающаяся тем, что алгоритм функционирования второго вычислительного устройства заключается в:- определении пройденного пути уборочной машины при первом проходе (см. фиг.1) в соответствии с выражением: Популярные патенты: 2197817 Поплавок для рыболовных удочек и снастей ... при этом чувствительность и видимость на поверхности воды. Шарообразная форма поплавка в высокой степени подвержена волновым колебаниям воды, что снижает возможность определения воздействия рыбы на наживку на крючке. Этот поплавок закрепляется на леске через две проушины и является несъемным с лески без полного разбора рыболовной снасти. При использовании предлагаемого поплавка может быть получен следующий технический результат: упрощение процесса регулировки грузоподъемности и чувствительности поплавка к воздействию рыбы на наживку на крючке, повышение точности регулировки в зависимости от применяемых рыболовных снастей с учетом природных условий, без изменения веса поплавка и ... 2148319 Растительное средство для борьбы с пресноводными моллюсками ... (лягушки, тритоны) 2-5 суток (100%-ную гибель через 2 часа)*. * В скобах дан соответствующий показатель для 5,41-дихлорсалициланилида. Препараты ели не действуют на растительность (5,41-дихлорсалициланилид вызывает ожог различной степени), распадаются в воде весной-летом в течение 4-7 суток, осенью - 6-10 суток (5,41-дихлорсалициланилид - 13-14 суток и 5 - 6,5 месяцев соответственно). Перед дезинвазией пастбищ и спущенных прудов препаратами ели не вносят органические и минеральные удобрения. На обработанных участках пастбищ до гибели моллюсков животных не выпасают. Дезинвазии предлагаемыми средствами подвергают пастбища и спущенные пруды. Обрабатывают локально, т. е. только места ... 2460269 Малогабаритный картофелеуборочный комбайн ... подкапывающий лемех, сепарирующее устройство, состоящее из ворохоподъемного и клубнеприемного элеваторов, ботвоотделяющие ремни, надетые с интервалом 12 см на клубнеприемное элеваторное полотно, имеет заостренные плоские диски, размещенные с интервалом, соответствующим ширине размещения клубней в гнезде, установленные на неподвижной оси на подшипниках качения. При этом с внешней стороны дисков с минимально возможным промежутком на той же оси на подшипниках установлены опорно-ходовые колеса, состоящие из ободьев, изготовленных из полосовой стали и связанных со ступицами посредством спиц.Над верхней ветвью клубнеприемного элеватора под необходимым углом к направлению движения ... 2446659 Способ и устройство для органического возделывания зерновых культур ... покровной озимой культуры возникают дополнительные ресурсы солнечного света, способствуя проявлению эффекта «густо- пусто» с соответствующим повышением урожайности (и устойчивости хлебостоя к полеганию). А при уборке урожая солому измельчают и разбрасывают. При осенней обработке поля дисковой бороной зелень озимой культуры (весеннего подсева под покров) можно заделать в почву в качестве сидерата вместе с пожнивными остатками для поддержания плодородия почвы ускорением нитрификации.При совместном или смешанном посеве зерновой культуры и многолетней травы необходимы в составе высевающего устройства и зерновые, и травосеящие аппараты. Вместо травосеящих в заявляемом ... 2250602 Широкозахватный колесный дождеватель ... на влажной почве колесных опор 2. Колесными опорами 2 несущие элементы 9 центральной секции 4 перемещают на новую позицию боковые секции 5. После установки колесного дождевателя на новой позиции добиваются вертикального положения ниппелей 16 дождевальных насадок 6. Водоподводящий трубопровод 7 не участвовал в работе при транспортном переезде колесного дождевателя. После выравнивания несущего элемента 9 на новой позиции, узел 1 присоединяют к гидранту оросительной сети, и процесс орошения повторяется.За счет того, что водоподводящий трубопровод 7 несет только функции распределения воды по длине широкозахватного колесного дождевателя и выполнен он из дешевого антикоррозионного ... |
Еще из этого раздела: 2479198 Способ ведения сильнорослых сортов винограда 2473211 Приспособление для автоматической дойки молочного скота 2062564 Способ оценки устойчивости растений к засухе северного и южного типа на ранних этапах онтогенеза 2159030 Способ широкорядного посева пропашных культур 2423036 Биоконтейнер для посадки растений 2053664 Медогонка 2275801 Способ выращивания рыбы в рисовых чеках (варианты) 2253239 Способ производства средства для обработки растений (варианты) 2172085 Способ управления групповым вождением машин 2482663 Способ мелиорации почвы рисовой оросительной системы к посеву риса |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||
 1540053, кл. A01D 41/12, опубл. 15.01.91. Бюл.
1540053, кл. A01D 41/12, опубл. 15.01.91. Бюл.  , где d - расстояние между точками A0 с координатами (x1,y1,z1) и An (x 2,y2,z2), м;
, где d - расстояние между точками A0 с координатами (x1,y1,z1) и An (x 2,y2,z2), м; , где V - скорость перемещения уборочной машины, м/с, t - время движения уборочной машины при первом проходе, с;
, где V - скорость перемещения уборочной машины, м/с, t - время движения уборочной машины при первом проходе, с; , где S - площадь поля, м2, k - расстояние между проходами уборочной машины, м;
, где S - площадь поля, м2, k - расстояние между проходами уборочной машины, м; , где Bn - координаты положения уборочной машины в начале второго прохода, м, m - количество топлива в топливном баке уборочной машины, кг, m1 - расход топлива после первого прохода и выполнения маневра поворота уборочной машины, кг.;
, где Bn - координаты положения уборочной машины в начале второго прохода, м, m - количество топлива в топливном баке уборочной машины, кг, m1 - расход топлива после первого прохода и выполнения маневра поворота уборочной машины, кг.; , с, где dm - расстояния между координатами точки Bm и Bn, м;
, с, где dm - расстояния между координатами точки Bm и Bn, м; , где Bn - координаты положения уборочной машины в начале второго прохода, м, G - емкость бункера убираемой сельхозкультуры уборочной машины, кг, G1 - количество убираемой сельхозкультуры после первого прохода, кг,
, где Bn - координаты положения уборочной машины в начале второго прохода, м, G - емкость бункера убираемой сельхозкультуры уборочной машины, кг, G1 - количество убираемой сельхозкультуры после первого прохода, кг, , с, где dk - расстояния между координатами точки Bk и Bn, м;
, с, где dk - расстояния между координатами точки Bk и Bn, м; , где d - расстояние между точками А0 с координатами (x1, y1, z1) и An (x2, y2, z2), м;- определении координат нахождения уборочной машины в момент начала уборки урожая А0 и в момент окончания первого прохода уборочной машины An, осуществляется на основе использования датчика навигации спутниковой системы ГЛОНАСС;- определении скорости перемещения уборочной машины при первом проходе в соответствии с выражением:
, где d - расстояние между точками А0 с координатами (x1, y1, z1) и An (x2, y2, z2), м;- определении координат нахождения уборочной машины в момент начала уборки урожая А0 и в момент окончания первого прохода уборочной машины An, осуществляется на основе использования датчика навигации спутниковой системы ГЛОНАСС;- определении скорости перемещения уборочной машины при первом проходе в соответствии с выражением:  , где V - скорость перемещения уборочной машины, м/с; t - время движения уборочной машины при первом проходе, с; - определении количества необходимых прогонов для уборки урожая на данном поле в виде выражения
, где V - скорость перемещения уборочной машины, м/с; t - время движения уборочной машины при первом проходе, с; - определении количества необходимых прогонов для уборки урожая на данном поле в виде выражения  , где S - площадь поля, м2; k - расстояния между проходами уборочной машины, м;- фиксации расхода топлива (m1) после первого прохода уборочной машиной и осуществления ею поворота на начало второго прохода;- определении прогнозируемых координат до очередной заправки топлива в соответствии с выражением:
, где S - площадь поля, м2; k - расстояния между проходами уборочной машины, м;- фиксации расхода топлива (m1) после первого прохода уборочной машиной и осуществления ею поворота на начало второго прохода;- определении прогнозируемых координат до очередной заправки топлива в соответствии с выражением:  , где Bn - координаты положения уборочной машины в начале второго прохода, м; m - количество топлива в топливном баке уборочной машины, кг; m1 - расход топлива после первого прохода и выполнения маневра поворота уборочной машины, кг;- определении прогнозируемого времени до очередной заправки топлива в соответствии с выражением
, где Bn - координаты положения уборочной машины в начале второго прохода, м; m - количество топлива в топливном баке уборочной машины, кг; m1 - расход топлива после первого прохода и выполнения маневра поворота уборочной машины, кг;- определении прогнозируемого времени до очередной заправки топлива в соответствии с выражением  , где dm - расстояния между координатами точки Bm и Bn, м;- определении прогнозируемых координат до очередной выгрузки убираемой сельхозкультуры в соответствии с выражением:
, где dm - расстояния между координатами точки Bm и Bn, м;- определении прогнозируемых координат до очередной выгрузки убираемой сельхозкультуры в соответствии с выражением:  , где Bn - координаты положения уборочной машины в начале второго прохода, м;G - емкость бункера убираемой сельхозкультуры уборочной машины, кг;G1 - количество убираемой сельхозкультуры после первого прохода, кг; - определении прогнозируемого времени до очередной выгрузки убираемой сельхозкультуры в соответствии с выражением
, где Bn - координаты положения уборочной машины в начале второго прохода, м;G - емкость бункера убираемой сельхозкультуры уборочной машины, кг;G1 - количество убираемой сельхозкультуры после первого прохода, кг; - определении прогнозируемого времени до очередной выгрузки убираемой сельхозкультуры в соответствии с выражением  , с, гдеdk - расстояния между координатами точки Bk и Bn, м;- фиксации времени выполнения операций выгрузки зерна и заправки уборочной машины (tвыг, tзап), с;- определении прогнозируемого времени, необходимого для уборки урожая в соответствии с выражением: Tпр=T1+T2+t выг+tзап, где T1 - прогнозируемое время при осуществлении всех проходов поля уборочной машиной, T2 - прогнозируемое время при осуществлении поворотов уборочной машины с одного прохода до другого, tвыг , tзап - время выгрузки и заправки уборочной машины; - определении прогнозируемого урожая поля в соответствии с выражением: Gобщ=nG1, где n - количество прогонов, G1 - количество убираемой сельхозкультуры после первого прохода и выполнения маневра поворота уборочной машины, кг;- формировании карты урожайности на основе фиксации массы убранного зерна и координат положения уборочной машины.
, с, гдеdk - расстояния между координатами точки Bk и Bn, м;- фиксации времени выполнения операций выгрузки зерна и заправки уборочной машины (tвыг, tзап), с;- определении прогнозируемого времени, необходимого для уборки урожая в соответствии с выражением: Tпр=T1+T2+t выг+tзап, где T1 - прогнозируемое время при осуществлении всех проходов поля уборочной машиной, T2 - прогнозируемое время при осуществлении поворотов уборочной машины с одного прохода до другого, tвыг , tзап - время выгрузки и заправки уборочной машины; - определении прогнозируемого урожая поля в соответствии с выражением: Gобщ=nG1, где n - количество прогонов, G1 - количество убираемой сельхозкультуры после первого прохода и выполнения маневра поворота уборочной машины, кг;- формировании карты урожайности на основе фиксации массы убранного зерна и координат положения уборочной машины.