Способ управления загрузкой зерноуборочного комбайна и устройство для его осуществленияПатент на изобретение №: 2312485 Автор: Богданович Виталий Петрович (RU), Рыков Виктор Борисович (RU), Дюжев Андрей Анисимович (BY), Жмайлик Валерий Алексеевич (BY) Патентообладатель: Государственное научное учреждение "Всероссийский научно-исследовательский проектно-технологический институт механизации и электрификации сельского хозяйства" (ГНУ ВНИПТИМЭСХ) (RU), Республиканское конструкторское унитарное предприятие "ГСКБ по зерноуборочной и кормоуборочной технике" (BY), Республиканское унитарное предприятие "Гомельский завод сельскохозяйственного машиностроения "Гомсельмаш" (BY) Дата публикации: 20 Декабря, 2007 Начало действия патента: 26 Февраля, 2006 Адрес для переписки: 347740, Ростовская обл., г. Зерноград, ул. Ленина, 14, ГНУ ВНИПТИМЭСХ Изображения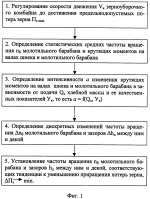 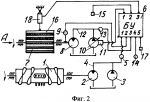 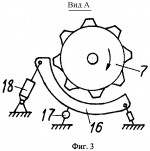  Изобретение относится к сельскохозяйственному машиностроению. Регулирование частоты вращения молотильного барабана осуществляют по интенсивности изменения крутящего момента на валу шнека. Частоту вращения молотильного барабана изменяют регулятором рабочего объема насоса. Регулирование зазоров между молотильным барабаном и декой осуществляют по интенсивности изменения крутящего момента на валу молотильного барабана в соответствии с потерями зерна. В устройстве управления загрузкой вал шнека соединен с приводом на валу гидромотора, подключенного гидролинией с датчиком давления к насосу. Вал молотильного барабана соединен с валом гидромотора с датчиком давления к своему насосу, оснащенному регулятором рабочего объема. Датчики давления гидролиний, датчик частоты вращения молотильного барабана, датчик зазоров между молотильным барабаном и декой и датчик потерь зерна подключены к первому по пятый входам блока управления. Регуляторы рабочего объема насоса, скорости движения комбайна и зазоров между молотильным барабаном и декой соединены с первым по третий выходами блока управления. Регулирование частоты вращения молотильного барабана и зазоров между ним и декой способствует уменьшению потребляемой мощности на обмолот и снижению дробления зерна. 2 н.з.п. ф-лы, 5 ил., 2 табл. Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в системах управления самоходных сельскохозяйственных машин, в частности загрузкой зерноуборочного комбайна. Известен способ управления загрузкой зерноуборочного комбайна (RU 2009632, A 01 D 41/12, 30.03.94), включающий регулирование частоты вращения молотильного барабана и скорости движения зерноуборочного комбайна. Однако скорость движения зерноуборочного комбайна регулируют и, следовательно управляют загрузкой, согласно соотношению частот вращения валов молотильного барабана и двигателя, значение которого зависит от проскальзывания в ременном приводе молотильного барабана и снижения частоты вращения вала двигателя с ростом затрат мощности на движение зерноуборочного комбайна. Управление загрузкой зерноуборочного комбайна одновременно по двум параметрам имеет низкую точность и, в случае существенного изменения подачи хлебной массы, значительно увеличиваются потери зерна за комбайном. Известен способ управления загрузкой зерноуборочного комбайна (SU 484833, A 01 D 41/12, 25.09.75), включающий регулирование скорости движения зерноуборочного комбайна и частоты вращения молотильного барабана. Согласно известному способу частоту вращения молотильного барабана регулируют с опережением по колебанию толщины слоя хлебной массы над обтекателями подборщика, которая зависит от особенностей конструкции и характера движения по полю валковой жатки во время скашивания. Кроме того, известный способ управления загрузкой пригоден только при раздельной уборке урожая. Известен способ управления загрузкой зерноуборочного комбайна (SU 1175386, A 01 D 41/12, 30.08.85), включающий контроль потерь зерна за зерноуборочным комбайном, регулирование скорости движения зерноуборочного комбайна, регулирование частоты вращения молотильного барабана и зазоров между ним и декой. Использование в процессе управления загрузкой нескольких параметров функционирования зерноуборочного комбайна и показателей качества хлебной массы не гарантирует повышения точности управления. Методы определения влажности и засоренности хлебной массы, требующие разные затраты времени, исключают одновременное использование этих показателей в процессе управления. Известен способ управления загрузкой зерноуборочного комбайна (GE 10306725, A 01 D 41/12, A01D 41/127, 16.09.04), включающий определение уплотнения хлебной массы в зависимости от ее качественных показателей и усилия сжатия. Недостаток известного способа заключается в сжатии гидроцилиндром пробы хлебной массы, которое производят с перерывом на замену пробы и холостой ход штока гидроцилиндра. Известно устройство для управления загрузкой зерноуборочного комбайна (SU 1142034, A 01 D 41/12, 28.02.85), содержащее шнек жатки с приводом и датчик крутящего момента. Недостаток известного устройства состоит в измерении крутящего момента на валу шнека жатки по усилию натяжения ведущей ветви гибкой передачи привода. Измеренные таким способом значения крутящего момента имеют недостаточную достоверность и поэтому не пригодны к использованию при управлении загрузкой зерноуборочного комбайна. Известно устройство для управления загрузкой зерноуборочного комбайна (SU 1058536, A 01 D 41/12, 23.03.82), содержащее датчики крутящего момента на валах жатки и молотильного барабана, регулятор зазоров между молотильным барабаном и декой. Недостатком известного устройства является отсутствие измерительных средств качественных показателей хлебной массы (влажности, прочности соломы и колоса, соотношение зерновой и незерновой частей), из-за чего увеличивается ошибка регулирования зазоров между молотильным барабаном и декой, возрастают потери зерна. Для устранения отмеченных недостатков предлагается способ управления загрузкой зерноуборочного комбайна, согласно которому изменение подачи хлебной массы и регулирование частоты вращения молотильного барабана регистрируют и осуществляют по интенсивности изменения крутящего момента на валу шнека жатки или подборщика, а изменение качественных показателей хлебной массы и регулирование зазоров между молотильным барабаном и декой регистрируют и осуществляют по интенсивности изменения крутящего момента на валу молотильного барабана в соответствии с потерями зерна. В устройстве для управления загрузкой зерноуборочного комбайна вал шнека жатки или подборщика соединен с валом гидромотора, подключенного гидролинией с установленным в ней датчиком давления к насосу, вал молотильного барабана соединен с валом гидромотора, подключенного гидролинией с установленным в ней датчиком давления к насосу, оснащенному регулятором рабочего объема, причем датчики частоты вращения, давления, зазоров между молотильным барабаном и декой и потерь зерна подключены к первому - пятому входам блока управления, а регуляторы рабочего объема насоса, скорости движения и зазоров между молотильным барабаном и декой соединены с первым - третьим выходами блока управления. На фиг.1 представлена схема последовательности операций при управлении загрузкой зерноуборочного комбайна. На фиг.2 представлена схема устройства для осуществления способа управления загрузкой зерноуборочного комбайна. На фиг.3 представлен вид А устройства для осуществления способа управления загрузкой зерноуборочного комбайна. На фиг.4 изображены графики изменения давления в гидролиниях. На фиг.5 показано определение интенсивности изменения крутящего момента на валу шнека подборщика. Управление загрузкой зерноуборочного комбайна осуществляют следующим образом (фиг.1). Перед заездом в поле регулируют частоту вращения n б молотильного барабана и зазоры hд между ним и декой в зависимости от убираемой культуры и ее состояния. В процессе уборки зерновых культур прямым комбайнированием или подбора валков производят регулирование скорости движения зерноуборочного комбайна так, чтобы потери зерна П з за комбайном были предельно допустимые П з max. Измеряют крутящий момент М ш на валу шнека жатки или подборщика и определяют значение его статистического среднего Мшс. Измеряют частоту вращения nб молотильного барабана и крутящий момент на его валу, определяют значения статистического среднего частоты вращения nбс и крутящего момента Мбс. Кратковременно увеличивают скорость движения зерноуборочного комбайна, то есть подачу хлебной массы, и определяют интенсивности изменения крутящего момента на валу шнека аМш=f(Ax , Ук) и крутящего момента на валу молотильного барабана аМб=f(Qx , ук). Интенсивность (скорость) изменения крутящего момента определяют как отношение приращения крутящего момента Определяют приращение потерь зерна В случае увеличения крутящего момента на валу шнека свыше Мшс сперва увеличивают частоту вращения nб молотильного барабана на Устройство для осуществления способа управления загрузкой зерноуборочного комбайна (фиг.2 и фиг.3) содержит шнек 1 жатки или подборшика, вал которого соединен с валом привода в виде гидромотора 2. К насосу 3 гидролинией 4 с установленным в ней датчиком 5 давления подключен гидромотор 2. Датчик 5 давления подключен к первому входу блока 6 управления. Вал молотильного барабана 7 соединен с валом гидромотора 8 и оснащен датчиком 9 частоты вращения. К насосу 10, снабженному регулятором 11 рабочего объема, являющегося регулятором частоты вращения молотильного барабана, гидролинией 12 с установленным в ней датчиком 13 давления подключен гидромотор 8. Датчик 9 частоты вращения и датчик 13 давления подключены ко второму и третьему входам блока 6 управления. Регулятор 11 рабочего объема насоса 10 соединен с первым выходом блока 6 управления. Устройство 14 для контроля потерь зерна за зерноуборочным комбайном подключено к четвертому входу блока 6 управления, а регулятор 15 скорости движения зерноуборочного комбайна соединен со вторым его выходом. Дека 16 оснащена датчиком 17, определяющим зазоры между молотильным барабаном 7 и декой 16, и регулятором 18 зазоров. Датчик 17 подключен к пятому входу блока 6 управления, а регулятор 18 соединен с третьим его выходом. Устройство работает следующим образом. В зависимости от убираемой культуры и ее состояния в блок 6 управления вводят значения частоты вращения nб молотильного барабана 7 и зазоров hд между молотильным барабаном 7 и декой 16, а также значение интервала времени После начала уборки увеличивают скорость VК движения зерноуборочного комбайна регулятором 15, пока потери зерна П за комбайном, контролируемые устройством 14, не станут предельнодопустимыми П з max. Сигнал от устройства 14 поступает на четвертый вход блока 6 управления. Регулятор 15 скорости движения соединен с первым выходом блока 6 управления, из которого поступает соответствующий сигнал. Затем измеряют давление рш в гидролинии 4 шнека 1 и давление рб в гидролинии 12 датчиками давления 5 и 13 /1/. Сигналы от датчиков 5 и 13 поступают на первый и третий входы блока 6 управления. В блоке 6 управления определяют статистическое среднее р шс давления рш и статистическое среднее рбс давления рб. Крутящий момент на валах шнека 1 Мш и молотильного барабана 7 Мб определяют по формуле М=pq где р - давление в гидролинии 4 или 12; q - рабочий объем гидромотора 3 или 8;
следовательно, Мш=рш и Mб=рб. Давление рш соответствует подаче хлебной массы, рш=f(Qx, У к). Такая зависимость обусловлена тем, что шнек 1 уплотняет хлебную массу, проходящую через окно наклонной камеры к транспортеру. Поэтому изменение или увеличение подачи Qx вызывает уменьшение или увеличение давления р ш. По этой же причине изменяется давление р б, пока зазоры между молотильным барабаном 7 и декой 16 не регулируют. Кратковременно увеличивают скорость движения Vк зерноуборочного комбайна регулятором 15, то есть подачу хлебной массы. Измеряют время t п прохождения хлебной массы от шнека 1 до молотильного барабана 7 (фиг.4), равное времени между моментами возникновения пиков давления рш и рб , регистрируемых датчиками 5 и 13 в гидролиниях 4 и 12. Далее измеряют значения давлений рш и р б через интервал времени р=Ае в, где A=Qx и в=Ук - коэффициенты, характеризующие сорт убираемой культуры и качественные показатели Ук хлебной массы. Время измерения и группирования значений давлений рш и pб, равное tг =m где m - количество интервалов времени не должно превышать tг<0,5t п. Также определяют приращение потерь зерна Введенные дискретные изменения являются функциями В дальнейшем предлагаемое устройство уточняет значения р шс и pбс с периодичностью, задаваемой согласно условиям уборки вручную или автоматически, регулируют частоту вращения nб молотильного барабана 7 и зазоры hд между ними и декой 16, поддерживая В случае резкого увеличения давления в гидролинии 4, например, во время уборки в неблагоприятных условиях, частоту вращения nб молотильного барабана 7 и зазоры между ним и декой 16 могут изменять на Управление загрузкой зерноуборочного комбайна осуществляют как по изменению подачи хлебной массы, так и в зависимости от ее качественных показателей: влажности, соотношения зерновой и незерновой частей, прочности соломы и колоса, состояния хлебостоя и валков. Пример. Убирают озимую пшеницу, характеристика которой представлена в табл.1 Таблица 1 Характеристика озимой пшеницыНаименование показателяЗначение Урожайность, ц/га41,0 Влажность зерна, %10,1 Влажность соломы, %7,6 Соотношение массы зерна и массы соломы1:1,4 Длина стебля с колосом, см 81,4Длина колоса, см 6,7Уборка - раздельная, валок скошен жаткой с шириной захвата 6 м, убираемая пшеница частично полеглая. Отношение массы соломы к массе зерна в валке 1:1,14. Валки подбирают и обмолачивают зерноуборочным комбайном Дон-1500, у которого шнек подборщика и молотильный барабан оснащены объемными гидроприводами. Зазоры между молотильным барабаном и декой 22 мм на входе и 6 мм на выходе. В табл.2 приведены режимы функционирования объемных гидроприводов шнека подборщика и молотильного барабана. Скорость движения комбайна - 4,9 км/ч, фактическая подача хлебной массы - 8,1 кг/с. Потери зерна за комбайном составляют 1,3%, дробление - 4,1%. Регулирование частоты вращения молотильного барабана и зазоров между ними и декой будет способствовать снижению затрат мощности на обмолот и дробления зерна. Таблица 2 Режимы функционирования гидроприводов рабочих органов комбайна Дон-1500Наименование Значение МинимальноеСтатистическое среднее МаксимальноеДавление в гидроприводе шнека, МПа0,82,7 9,3Частота вращения барабана, об/мин624 715735Давление в гидроприводе барабана, МПа3,0 9,118,4 Предлагаемый способ управления загрузкой зерноуборочного комбайна и устройство для его осуществления могут быть использованы на различных уборочных машинах для снижения потерь урожая за ними. Применение предлагаемого способа управления загрузкой зерноуборочного комбайна и устройства для его осуществления не оказывает отрицательного влияния на окружающую среду, так как способствуют уменьшению удельных затрат энергии на выполнение уборочных работ в сложных условиях с использованием зерноуборочных и других комбайнов. Литература 1. Исследование и определение оптимального уровня гидрофикации зерноуборочных комбайнов, включающего гидропривод вращательного движения рабочих органов, гидропривод ходовой части и гидропривод возвратно-поступательного движения / Отчет ВНИПТИМЭСХ - Зерноград, 1985. - С.66-67, 73-79, 83. 2. Самойлов В.Ф. Улучшение процесса формообразования соломистого материала комбайновым агрегатом и совершенствование копенной технологии уборки. Дис....канд. техн. наук. - Зерноград, 1987. - С.1-3, 113-116. Формула изобретения1. Способ управления загрузкой зерноуборочного комбайна, включающий контроль потерь зерна за зерноуборочным комбайном, регулирование скорости движения зерноуборочного комбайна, регулирование частоты вращения молотильного барабана и зазоров между ними и декой, отличающийся тем, что изменение подачи хлебной массы и регулирование частоты вращения молотильного барабана регистрируют и осуществляют по интенсивности изменения крутящего момента на валу шнека жатки или подборщика, а изменение качественных показателей хлебной массы и регулирование зазоров между молотильным барабаном и декой регистрируют и осуществляют по интенсивности изменения крутящего момента на валу молотильного барабана в соответствии с потерями зерна. 2. Устройство для управления загрузкой зерноуборочного комбайна, содержащее шнек жатки или подборщика с приводом, устройство для контроля потерь зерна за зерноуборочным комбайном и регулятор его скорости, датчик и регулятор частоты вращения молотильного барабана, датчик и регулятор зазоров между молотильным барабаном и декой, отличающееся тем, что вал шнека жатки или подборщика соединен с валом гидромотора, подключенного гидролинией с установленным в ней датчиком давления к насосу, вал молотильного барабана соединен с валом гидромотора, подключенного гидролинией с установленным в ней датчиком давления к насосу, оснащенному регулятором рабочего объема, причем датчики частоты вращения, давления, зазоров между молотильным барабаном и декой и потерь зерна подключены к первому по пятый входам блока управления, а регуляторы рабочего объема насоса, скорости движения и зазоров между молотильным барабаном и декой соединены с первым по третий выходами блока управления. MM4A Досрочное прекращение действия патента из-за неуплаты в установленный срок пошлины за поддержание патента в силе Дата прекращения действия патента: 27.02.2009 Дата публикации: 20.08.2011 Популярные патенты: 2477599 Жатка зерноуборочного комбайна ... механизма, предохранительной муфты (комбайны самоходные зерноуборочные «Дон-1500» и «Дон-1200». Техническое описание и конструкции по эксплуатации. Производственное объединение «Ростсельмаш». Ростов-на-Дону, 1986, стр.17-27).Основным недостатком этой жатвенной части является низкая захватывающая способность витков шнека, способствующая периодическому скапливанию и задержке скощенной хлебной массы на платформе жатки перед шнеком с правой и левой стороны от пальчикового механизма, что вызывает заклинивание хлебной массы между витками шнека и днищем жатки, колебание подачи которой приводят к неравномерной загрузке рабочих органов молотилки ... 2140137 Универсальный способ получения проросших семян сельскохозяйственных культур ... с использованием нефильтрованной водопроводной воды, так и после ручной очистки и обработки профильтрованной водой. Поскольку условия проведения опытов не были стерильными, эти данные свидетельствуют о том, что гнилостная микрофлора изначально находилась именно на поверхности сухих семян, а не воде и не в воздухе, и для получения качественной продукции дезинфекция семян была необходима. Предлагаемый нами универсальный способ получения проростков имеет преимущества по сравнению со всеми описанными выше способами. Дезинфекция семян раствором особого нетоксичного окислителя определенной концентрации, не содержащего хлор и поэтому не представляющего опасности для потребителя, ... 2195102 Устройство для отделения грунта и земли от корней и корневищ солодки в качестве лакричного сырья ... исходного положения деформатора 24. Упомянутый механизм смонтирован в полости между фланцем 13 вала 14 и донной частью 12 барабана 2. Механизм 23 опорожнения полости барабана 2 имеет снабженный возможностью осевого перемещения вал 25. На одном конце вала 25 размещены штурвал 26 и прямозубая цилиндрическая шестерня 27. Ступица шестерни 27 и ступица штурвала 26 с валом 25 соединены призматическими шпонками 28 и 29. От осевого смещения шестерня 27 и ступица штурвала 26 ограничены гайкой 30 на резьбовой части 31 вала 25. В одной из впадин между смежными зубьями 32 шестерни 27 введен в зацепление заостренный конец 33 подпружиненного вертикально смонтированного штока 34. Шток 34 установлен ... 2267924 Способ стимулирования роста растений ... исследования неожиданно показали, что биологическая активность предельных дикарбоновых кислот с уменьшением концентрации не исчезает, а сохраняется, причем некоторые кислоты имеют еще один максимум в области концентраций 10-11-10 -15 моль/л. Была исследована биологическая активность ряда наиболее распространенных предельных дикарбоновых кислот - лимонной, малеиновой, малоновой, молочной, фумаровой, щавелевой, яблочной и янтарной кислот, для чего были приготовлены растворы с концентрацией (моль/л): 10-3, 10-7, 10-11, 10-15, 10-17 и изучено их влияние на урожайность редиса путем предпосевной обработки (замачивание семян) и опрыскивания вегетирующих растений.Предлагаемые растворы ... 2399203 Способ оценки физиологического состояния организма цыплят ... 2103692 по кл. МПК G01N 33/53, опуб. 27.01.98 г.). Однако способ предназначен только для человека и используется для прогнозирования течения заболевания у больных. Известен способ прогнозирования продуктивности коров по биохимическому анализу крови (патент РФ 2214709, кл. МПК А01к 67/02, опуб. 27.10.03 г.). Определяют уровень калия в эритроцитах телок и при содержании калия до 19 мэкв/л животных относят к высокопродуктивным с укороченным сроком хозяйственного использования, а при содержании калия свыше 26 мэкв/л животных относят к низкопродуктивным с длительным сроком хозяйственного использования.Данный способ позволяет в раннем возрасте прогнозировать пожизненную ... |
Еще из этого раздела: 2007081 Способ биологической борьбы с вредителями капусты 2407282 Способ выращивания корнесобственных саженцев винограда и машина для его осуществления 2086081 Рабочий орган культиватора 2076603 Способ повышения урожайности сельскохозяйственных культур 2492640 Способ выращивания рыбы в мелководных заморных озерах с применением глубокого водоема-спутника 2051553 Устройство для обезвоживания навоза 2216903 Устройство для отделения плодов от ветвей 2053661 Устройство для сколачивания ульевых рамок 2477044 Искусственная рыболовная приманка (варианты) 2175833 Охладитель молока с аккумулятором холода |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||
 M ко времени tи, за которое это приращение происходит.
M ко времени tи, за которое это приращение происходит. min.
min. м/2
м/2 ,
,