МанипуляторПатент на изобретение №: 2296042 Автор: Шестаков Яков Иванович (RU), Грязин Владимир Альбертович (RU), Макаров Владимир Евгеньевич (RU) Патентообладатель: Марийский государственный технический университет (RU) Дата публикации: 27 Октября, 2006 Начало действия патента: 20 Апреля, 2005 Адрес для переписки: 424024, г.Йошкар-Ола, пл. Ленина, 3, МарГТУ, отдел интеллектуальной собственности Изображения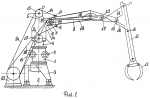  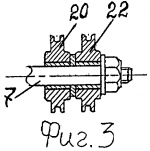 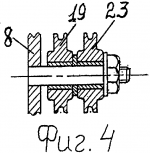 Изобретение относится к грузоподъемному оборудованию и может быть использовано, например, для валки, пакетирования и трелевки в лесной промышленности. Манипулятор содержит установленную на основании поворотную колонну с механизмом ее поворота относительно вертикальной оси, шарнирно закрепленную на ней стрелу и механизм поворота стрелы в вертикальной плоскости, включающий силовой орган и гибкую тягу. На свободном конце стрелы шарнирно установлена рукоять с рабочим органом и механизмами их привода. Силовой орган механизма поворота стрелы в вертикальной плоскости выполнен в виде лебедки, установленной на раме самоходного шасси или на поворотной колонне, или на основании. Гибкая тяга одним концом соединена со стрелой, а другим концом пропущена через обводной блок, установленный на верхнем конце поворотной колонны, обогнута несколько раз вокруг барабана лебедки, пропущена через обводной блок, установленный на поворотной колонне ниже оси крепления стрелы к поворотной колонне, и соединена со стрелой. При этом верхние точки обводных блоков расположены на равных расстояниях от оси крепления стрелы, а точки крепления концов гибкой тяги к стреле расположены также на равных расстояниях от оси крепления стрелы к поворотной колонне. Изобретение позволяет снизить динамические нагрузки, обеспечивает надежный привод стрелы и рукояти, обеспечивает унификацию в приводах стрелы и рукояти. 2 з.п. ф-лы, 4 ил. Изобретение относится к грузоподъемному оборудованию и может быть использовано, например, для валки, пакетирования и трелевки в лесной промышленности и лесном хозяйстве. Известен манипулятор, включающий установленную на основании поворотную колонну, шарнирно закрепленную на ней стрелу и механизм поворота последней в вертикальной плоскости, содержащий гидроцилиндр, шток которого связан с гибкой тягой, запасованной в смонтированный на колонне обводные блоки и соединенной одним своим концом со стрелой (Авторское свидетельство СССР №216202, кл. В 66 С 23/16, 1966 г.). Известный манипулятор имеет относительно большие габариты и сложную конструкцию. Известен так же манипулятор, содержащий установленную на основании поворотную колонну с механизмом ее поворота вокруг вертикальной оси, шарнирно закрепленную на ней стрелу, на свободном конце которой шарнирно установлена рукоять с рабочим органом и механизмами их привода, и механизм поворота стрелы в вертикальной плоскости, включающей силовой орган, гибкую тягу, пропущенную через обводные блоки, один из которых установлен на верхнем конце поворотной колонны, и связанную с силовым органом и стрелой (Авторское свидетельство СССР №1723010, кл. В 66 С 23/16, 1992 г.). Известный манипулятор обладает тем недостатком, что принудительно осуществляется только подъем стрелы, а ее опускание происходит под действием собственной массы и массы груза и при этом возможны значительные динамические усилия, особенно при торможении и остановке. Для устранения указанных недостатком в предлагаемом манипуляторе, включающем установленную на основании поворотную колонну с механизмом ее поворота вокруг вертикальной оси, шарнирно закрепленную на ней стрелу, на свободном конце которой шарнирно установлена рукоять с рабочим органом и механизмами их привода, и механизм поворота стрелы в вертикальной плоскости, содержащий силовой орган, гибкую тягу, пропущенную через обводные блоки, один из которых установлен на верхнем конце поворотной колонны, и связанную с силовым органом и стрелой, силовой орган выполнен в виде лебедки, установленной на раме самоходного шасси, а гибкая тяга одним концом соединена со стрелой и другой конец ее пропущен через обводной блок, установленный на верхнем конце поворотной колонны, обогнут несколько раз вокруг барабана лебедки, пропущен через обводной блок, установленный на поворотной колонне ниже оси крепления стрелы и соединен с последней, механизм привода рукояти включает лебедку, установленную на раме самоходного шасси, и гибкую тягу, одним концом связанную с рукоятью выше оси ее поворота, а другой конец пропущен через обводные блоки, установленные на стреле и оси поворота стрелы относительно поворотной колонны, обогнут несколько раз вокруг барабана лебедки, пропущен через обводные блоки, установленные на оси поворота стрелы и на стреле, и соединен с рукоятью ниже оси ее поворота, при этом лебедка привода стрелы и лебедка привода рукояти могут быть объединены, т.е. установлена двухбарабанная лебедка известных конструкций, лебедка (лебедки) может быть установлена на поворотной колонне, верхние точки обводных блоков расположены на равных расстояниях от оси поворота стрелы, точки крепления концов гибкой тяги к стреле расположены также на равных расстояниях от оси поворота стрелы, а точки крепления концов гибкой тяги к рукояти расположены на равных расстояниях от оси поворота рукояти, при этом лебедка (лебедки) установлены с возможностью перемещения ее корпуса известными устройствами для регулирования натяжения гибких тяг. Такое конструктивное исполнение манипулятора снижает динамические усилия, обеспечивает надежный привод стрелы и рукояти, обеспечивает унификацию в приводах стрелы и рукояти. В патентной и научно-технической литературе подобной конструкции манипулятора нами не обнаружено. На фиг.1 изображена схема манипулятора, вид сбоку; на фиг.2 - то же, схема запасовки гибких тяг привода стрелы и рукояти; на фиг.3 - то же, установка обводных блоков для гибкой тяги привода рукояти на оси поворота стрелы; на фиг.4 - то же, установка обводных блоков на стреле. Манипулятор включает трубчатое основание 1, установленное на самоходном шасси 2 посредством фермы 3. В трубчатом основании 1 соосно установлена колонна 4, на верхнем конце которой установлены кронштейны 5 и 6. На кронштейне 6 при помощи оси 7 закреплена стрела 8. В трубчатом основании 1 смонтирован механизм 9 поворота колонны 4 и манипулятора в горизонтальной плоскости, например гидроцилиндры, снабженные штоками-рейками, взаимодействующими с зубчатым венцом, смонтированным на колонне 4. На свободном конце стрелы 8 через ось 10 шарнирно установлена рукоять 11, на свободном конце которой установлен рабочий орган 12. На трубчатом основании 1 или колонне 4, или самоходном шасси 2 установлена двухбарабанная лебедка 13 (две однобарабанные лебедки) известных конструкций с возможностью перемещения ее относительно узла, на котором она закреплена, известными устройствами. К стреле 8, в точке А закреплен один конец гибкой тяги 14, например трос, а другой конец пропущен через обводный блок 15, установленный на кронштейне 5, обогнут несколько раз (не менее двух оборотов) через барабан 16 лебедки 13, пропущен через обводной блок 17, установленный на колоне 4 ниже оси 7 крепления стрелы 8, и соединен со стрелой 8 в точке Б. Расстояния от оси 7 до точки А и от оси 7 до точки Б равны, равно как равны расстояния от верхней точки обводного блока 15 (точка С) до оси 7 и от оси 7 до верхней точки обводного блока 17 (точка Д), при условии, что диаметры обводных блоков 15 и 17 равны. К рукояти 11, ниже оси 10 ее поворота (точка В) закреплен один конец гибкой тяги 18, например троса, а другой пропущен через обводный блок 19, установленный на стреле 8, обводный блок 20, установленный на оси 7, обогнут несколько раз (не менее двух оборотов) через барабан 21 лебедки 13, пропущен через обводной блок 22, установленный на оси 7, обводной блок 23, установленный на стреле 8, и соединен с рукоятью 11 выше оси 10 ее поворота (точка Г). При этом расстояния от оси 10 до точки В и от оси 10 до точки Г равны. Манипулятор работает следующим образом. Для поднятия стрелы 8 оператор включает вращение барабана 16 лебедки 13 против часовой стрелки, а для опускания стрелы 8 - вращение барабана 16 лебедки 13 по часовой стрелке. В связи с тем, что расстояния точек С и Д до оси 7 равны, а расстояния точек А и Б до оси 7 также равны, и диаметры обводных блоков 15 и 17 одинаковы, то какая длина гибкой тяги 14 с барабана 16 будет смотана, такая же и намотается. При больших грузовых моментах манипулятора гибкая тяга 14 может быть средней частью (по длине) закреплена на барабане 16 одним из известных способов. Для подтягивания рукояти 11 оператор включает барабан 21 на вращение против часовой стрелки, а для отталкивания рукояти 11 - вращение барабана 21 лебедки 13 по часовой стрелке. При этом длина сматываемой части гибкой тяги 18 с барабана 21 равна наматываемой части, так как расстояния точек В и Г до оси 10 равны и диаметры обводных блоков 19 и 23 и блоков 20 и 22 равны. Так как при поднятии стрелы 8 и при подтягивании рукояти 11 происходит уменьшение вылета манипулятора и осуществляется вращением барабанов 16 и 21 против часовой стрелки, а при опускании стрелы 8 и при отталкивании рукояти 11 происходит увеличение вылета манипулятора и осуществляется вращением барабанов 16 и 21 по часовой стрелке. В этой связи при установке двухбарабанной лебедки 13 управление манипулятором упрощается, так как барабаны, как правило, устанавливаются на одном валу и соединяются с ним независимыми муфтами. В случае ослабления натяжения гибких тяг 14 и 18 их натяжение осуществляется перемещением лебедки 13 или блоков 15, 17, 19 и 23. Такое конструктивное выполнение манипулятора снижает динамические нагрузки, обеспечивает унификацию приводов стрелы и рукояти, улучшает экологию, так как исключается разлив гидравлической жидкости из приводов, снижается масса и стоимость приводов. Формула изобретения1. Манипулятор, содержащий установленную на основании поворотную колонну с механизмом ее поворота относительно вертикальной оси, шарнирно закрепленную на ней стрелу, на свободном конце которой шарнирно установлена рукоять с рабочим органом и механизмами их привода, и механизм поворота стрелы в вертикальной плоскости, включающий силовой орган, гибкую тягу, пропущенную через обводные блоки, один из которых установлен на верхнем конце поворотной колонны, и связанную с силовым органом и стрелой, отличающийся тем, что силовой орган механизма поворота стрелы в вертикальной плоскости выполнен в виде лебедки, установленной на раме самоходного шасси или на поворотной колонне, или на основании, а гибкая тяга одним концом соединена со стрелой, а другим концом пропущена через обводной блок, установленный на верхнем конце поворотной колонны, обогнута несколько раз вокруг барабана лебедки, пропущена через обводной блок, установленный на поворотной колонне ниже оси крепления стрелы к поворотной колонне, и соединена со стрелой, при этом верхние точки обводных блоков расположены на равных расстояниях от оси крепления стрелы, а точки крепления концов гибкой тяги к стреле расположены также на равных расстояниях от оси крепления стрелы к поворотной колонне. 2. Манипулятор по п.1, отличающийся тем, что механизм привода рукояти включает лебедку, установленную на раме самоходного шасси и гибкую тягу, одним концом связанную с рукоятью выше оси ее поворота, а другим концом пропущенную через обводные блоки, установленные один на стреле и другой на оси крепления стрелы к поворотной колонне, обогнутую несколько раз вокруг барабана лебедки, пропущенную через обводные блоки, установленные один на оси крепления стрелы и другой - на стреле, соединенную с рукоятью ниже оси ее поворота, при этом точки крепления концов гибкой тяги к рукояти расположены на равных расстояниях от оси ее поворота. 3. Манипулятор по п.1 или 2, отличающийся тем, что барабаны лебедок механизмов привода стрелы и рукояти установлены на одном валу, но с раздельным их соединением с валом, при этом лебедка/лебедки установлена с возможностью перемещения ее корпуса относительно детали, на которой она установлена, для поддержания нужного усиления натяжения гибкой тяги. MM4A - Досрочное прекращение действия патента СССР или патента Российской Федерации на изобретение из-за неуплаты в установленный срок пошлины за поддержание патента в силе Дата прекращения действия патента: 21.04.2007 Извещение опубликовано: 20.12.2008 БИ: 35/2008 Популярные патенты: 2437864 Способ микробиологической переработки птичьего помета ... Azotobacter chroococcum В 35, выращенной на мелассной среде (состав на 1 л: 45 г свекловичной мелассы, 2 г KH2PO4, 0,02 г дрожжевого экстракта) с титром 108 кл/мл и разведенной водой в соотношении 1:2, с последующим перемешиванием. В ходе эксперимента были использованы количества микробных культур как выбранные ранее, так и меньшие, что обусловлено составом подстилочного помета, который отличается высоким содержанием целлюлозосодержащих компонентов (солома, подсолнечная лузга). Под воздействием культуры Pseudomonas sp.114 происходит стимуляция развития целлюлозоразрушающих микроорганизмов (Cellulumonas, Trichoderma), а следовательно, образуется достаточное количество ... 2267261 Молочно-доильный комплекс ... с зарегистрированными изобретениями Изменения: Публикацию о досрочном прекращении действия патента на изобретение считать недействительной Номер и год публикации бюллетеня: 5-2007 Извещение опубликовано: 10.04.2007 БИ: 10/2007 MM4A Досрочное прекращение действия патента из-за неуплаты в установленный срок пошлины за поддержание патента в силе Дата прекращения действия патента: 15.01.2010 Дата публикации: ... 2463776 Система и способ для массовой валки деревьев ... показан вид сбоку с частичным вырезом оснастки для массовой валки, проиллюстрированной на фиг.10, с ее верхним ножом, согнутым в положение, показанное на фиг.7;- на фиг.16 показан вид сбоку с частичным вырезом второго варианта выполнения оснастки для массовой валки с согнутым верхним ножом; - на фиг.17 показан фрагмент оснастки для массовой валки по фиг.10, иллюстрирующий предпочтительное чередование корневого и верхнего ножей.Осуществление изобретения Далее со ссылками на вышеописанные чертежи рассмотрены некоторые предпочтительные варианты выполнения предложенных системы и способа для массовой валки деревьев. Таким образом, система содержит детали конструкции, которым на ... 2137365 Способ отпугивания биологических существ ... 2 сила тока через лампу уменьшается до нуля, а газовая плазма остывает и переходит в атомарное состояние. Импульс излучения прекращается. В дальнейшем процесс повторяется. Синхронизацию циклов заряд-разряд и необходимую частоту повторения импульсов излучения обеспечивает блок управления 6. Для отпугивания вредных биологических существ, например, мышей или крыс, установка размещается в защищаемой зоне, например, в помещении склада пищевых продуктов (фиг.2). Импульсная лампа 1 располагается по возможности на открытом пространстве, например, в середине помещения или под потолком. Во время работы происходит облучение грызунов как прямым, так и отраженным и переотраженным от стен, ... 2464784 Защитный слой для растений и деревьев, его изготовление и его применение ... цельного защитного слоя так, чтобы не мешать росту листа растения в фазе роста, которая представляет интерес для атаки плесенями и насекомыми-вредителями. Растворителем для золя, который формирует защитный слой на поверхности листа посредством золь-гель процесса, предпочтительно является вода (H2O).Матрица SiO 2 защитного слоя по данному изобретению может более того преимущественно, благодаря своему Si2+ заряду, иметь противомикробное действие посредством процессов ионного обмена. Для функционализации с одной стороны добавляют алифатические и ароматические альдегиды, карбоновые кислоты или аминокарбоновые кислоты в золь из тетраэтоксисилана, триметоксиметилсилана или ... |
Еще из этого раздела: 2490849 Способ переработки безподстилочного помета птиц клеточного содержания и навоза свиней в топливные брикеты 2464769 Машина для прессования тюков с вязальным устройством 2120709 Рама плуга 2242875 Энергосберегающий способ зимовки и содержания пчел на воле в однокорпусном улье усова 2476068 Фильтр для использования при переработке пищевых продуктов 2420949 Способ оценки потенциальной урожайности семянок сафлора красильного 2087614 Способ создания травяного газонного покрытия открытых спортивных площадок и ухода за ним 2243658 Способ повышения урожайности картофеля и томатов 2282959 Устройство для крепления навесного оборудования к транспортному средству 2440712 Автоматизированная система для хранения в поле, возможности оперативного контроля и выгрузки убранных продуктов урожая из уборочной машины |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||