Способ автоматизированного управления формированием урожаяПатент на изобретение №: 2264703 Автор: Михайленко И.М. (RU) Патентообладатель: Государственное научное учреждение Агрофизический научно-исследовательский институт Россельхозакадемии (RU) Дата публикации: 20 Апреля, 2005 Начало действия патента: 27 Октября, 2003 Адрес для переписки: 195220, Санкт-Петербург, пр-кт Гражданский, 14, Агрофизический институт, пат.пов. И.П.Ананьеву Изображения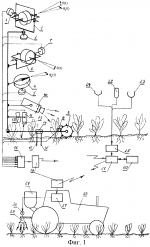 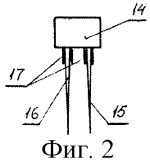 Изобретение относится к области сельского хозяйства. Способ включает в себя операции по получению информации о состоянии почвы, растений и погодных условий на каждом малом фрагменте сельскохозяйственного поля путем выполнения измерительного прохода сельскохозяйственной машины и сопоставления с сигналами автономной системы определения пространственных координат. На основании этой информации предварительно определяют оптимальную программу изменения средних по полю показателей развития растений, параметров почвенной среды и параметров технологических операций. Затем проводят операции сравнения в реальном времени оптимальных значений с фактически измеренными состояниями растений и почвенной среды, на основании чего формируют параметры технологических операций, выполняемых рабочими проходами сельскохозяйственных машин, где общий размер технологического воздействия складывается из предварительно найденного оптимального среднего и локальной оперативной поправки. Это обеспечивает повышение надежности формирования урожая. Максимальный эффект от реализации способа наблюдается на пропашных культурах, имеющих наиболее сложную структуру технологических процессов по сравнению с зерновыми и техническими культурами. 2 з.п. ф-лы, 2 ил. Изобретение относится к области сельского хозяйства и может быть использовано в автоматизированных системах управления земледельческими технологиями. Известны способы автоматизированного управления формированием урожая, объединенные под направлением программирование урожаев. Они включают в себя операции ручного сбора и фиксации информации о физических свойствах, химическом составе почвы и погодных условиях на сельскохозяйственном поле, использовании математических моделей влияния этих факторов на конечный урожай, выполнении расчетов по параметрам основных технологий перед посевом растений и проведении технологических операций в соответствии с этими расчетами (смотри, например [1]). Указанным способам свойственна невысокая надежность в получении реального урожая, что связано с недостаточной обоснованностью предварительных расчетов из-за недостатков используемых математических моделей, таких как неучет динамики процессов и неопределенность в параметрах, а также отсутствием оперативной корректировки технологий по изменениям природно-климатической обстановки и ситуации на сельскохозяйственном поле, которому свойственны нестационарность и пространственная неоднородность агрофизических свойств почв и генетических особенностей растений. Все это в целом приводит к недополучению урожая и неоправданным расходам материальных и энергетических ресурсов. Прототипом изобретения является способ автоматизированного управления формированием урожая, включающий в себя последовательность операций по учету информации о физических свойствах, химическом составе почвы и погодных условиях на сельскохозяйственном поле, а также пространственной неоднородности агрохимических параметров почв и генетических свойств растений. В дополнение к этой информации здесь используют данные о фактическом урожае за предыдущий год на каждом небольшом фрагменте сельскохозяйственного поля, для чего фиксируют сигналы спутниковой системы определения пространственных координат машины в моменты уборки урожая (см. [2]). Кроме того, здесь на основе математических моделей влияния почвенных и климатических факторов на конечный урожай производят расчеты параметров основных технологий перед посевом растений и выполняют технологические операции в соответствии с этими расчетами для каждого малого фрагмента сельскохозяйственного поля. В связи с тем, что урожай на каждом малом фрагменте сельскохозяйственного поля фиксируют в пространственных координатах только в конце вегетационного периода, то в этом способе также не учитывается оперативная природно-климатическая обстановка, нестационарность агрофизических параметров почв и генетических свойств растений, что не позволяет существенно повысить надежность получения урожаев. Кроме того, использование спутниковых систем определения пространственных координат не позволяет измерять высотную координату поля и тем самым учитывать влияние рельефа почвы на урожай, а сеансы связи со спутниками имеют высокую стоимость, что в целом существенно затрудняет их практическое применение. Изобретение решает задачу повышения величины и надежности процесса формирования урожая за счет существенного повышения степени его автоматизации на стадии, предшествующей периоду вегетации растений и в процессе их роста и развития. Заявляемый способ автоматизированного управления формированием урожая, как и прототип, включает в себя операции по получению информации о физических свойствах, химическом составе почвы и о погодных условиях на сельскохозяйственном поле, а также информации о фактическом урожае за предыдущий год на каждом малом фрагменте сельскохозяйственного поля, сопоставляемой с сигналами системы определения пространственных координат во время уборки урожая, использование математических моделей влияния почвенных и климатических факторов на конечный урожай, производство расчетов по параметрам основных технологий перед посевом растений и проведение технологических воздействий в реальном времени в соответствии с этими расчетами для каждого малого фрагмента сельскохозяйственного поля. Заявляемый способ отличается от прототипа тем, что перед началом периода вегетации определяют оптимальную программу изменения средних по полю показателей развития растений и параметров почвенной среды путем поиска максимума по параметрам технологических операций критерия оптимальности, учитывающего разность между стоимостью урожая и затратами на его получение, в реальном времени перед выполнением каждой технологической операции первым измерительным проходом сельскохозяйственной машины без орудий измеряют ее пространственные координаты, для чего одновременно используют сигналы кинематического счислителя пути относительно исходной точки поля с известными пространственными координатами, двухстепенного гироскопа, определяющего абсолютный курс и угол наклона к горизонту в направлении движения машины, магнитного компаса, определяющего магнитный курс сельскохозяйственной машины и одностепенного гироскопа, определяющего угол поперечного крена машины, одновременно при прохождении машины, с заданным периодом дискретизации поверхности поля производят телевизионную съемку растений, спектральную фотоэлектронную съемку поверхности почвы, измерение влажности и плотности почвы, все измеренные сигналы посредством радиомодемной связи передают от сельскохозяйственной машины на стационарный компьютер, где оценивают текущие показатели развития растений и параметров почвенной среды, и фиксируют в его памяти, куда же одновременно подают сигналы от метеостанции о температуре окружающего воздуха, уровне солнечной радиации, интенсивности осадков, по измеренной информации уточняют параметры моделей растений и почвенной среды, вторым рабочим проходом сельскохозяйственной машины с орудиями измеряют ее пространственные координаты, сигналы по радиомодемной связи передают на стационарный компьютер, где в его памяти для каждого малого фрагмента поля сравнивают измеренные значения показателей развития растений и параметров почвенной среды, полученные при первом проходе, с их оптимальными средними значениями, по результатам сравнения формируют поправки к средним оптимальным значениям параметров технологических воздействий, для каждого малого фрагмента поля определяют размер общего технологического воздействия, складывающегося из оптимального среднего и локальной поправки, которое по модемной связи передают в форме задания бортовому регулятору орудия машины, осуществляющего технологическое воздействие. Дополнительно заявляемый способ отличается тем, что измеренные значения температуры окружающего воздуха, уровня солнечной радиации и интенсивности осадков усредняют на суточном интервале времени и сравнивают с прогнозными значениями метеоусловий, формируемыми моделью, и в случае их различия по ним уточняют параметры модели метеоусловий; при уточнении параметров модели метеоусловий повторяют всю последовательность операций по формированию оптимальных программ выполнения технологических операций, в результате чего получают новые значения оптимальных программ параметров технологических операций и показателей развития растений и физических параметров почвы, которые фиксируют в памяти стационарного компьютера вместо предыдущих программ. Дополнительно заявляемый способ отличается тем, что измерение влажности и плотности почвы осуществляют диэлькометрическими датчиками-щупами, которые погружают в почвенную среду во время движения машины и в основаниях которых размещают тензометрические чувствительные элементы. Достигаемое от использования изобретения повышение надежности формирования урожая обеспечивается тем, что предварительное определение программы средних по полю показателей развития растений и параметров почвенной среды из условия максимума критерия, учитывающего разность между стоимостью урожая и затратами на его получение, позволяет сформировать экономически целесообразный технологический режим формирования урожая. Использование измерительного прохода сельскохозяйственной машины перед выполнением технологических операций с одновременным измерением и фиксацией пространственных координат, состояния растений и почвенной среды позволяет оценить локальные отклонения технологического режима формирования урожая от оптимальных средних значений и подготовить задания бортовым регуляторам для всех последующих проходов сельскохозяйственных машин, оборудованных различными, несовместимыми в одной технологической операции орудиями. Отработка этих заданий сельскохозяйственными машинами позволяет получить экономически целесообразный урожай равномерно по всей поверхности поля. Использование для определения пространственных координат сигналов кинематического счислителя пути, гироскопических датчиков положения машины и магнитного компаса позволяет получить значения координат в трех измерениях, не прибегая к спутниковой информации. Это одновременно экономит средства и обеспечивает более высокую точность позиционирования машины и последующего воспроизводства технологического режима. Измерение плотности и влажности почвы диэлькометрическими датчиками-щупами с размещенными на них тензометрическими датчиками позволяет существенно расширить информацию о состоянии почвенной среды, полученную сканирующими приборами, и тем самым повысить точность воспроизводства оптимальных режимов формирования экономически целесообразного урожая. В целом реализация заявляемого способа позволяет повысить не менее чем на 50% урожайность на единицу площади сельскохозяйственного поля при одновременном снижении себестоимости на 60-70%. Максимальный эффект от реализации способа наблюдается на пропашных культурах, имеющих более сложную структуру технологических процессов по сравнению с зерновыми и техническими культурами. На фиг.1 представлена схема, поясняющая пример реализации способа автоматизированного управления формированием урожая, на фиг.2 - диэлькометрический датчик. Для реализации заявляемого способа необходима сельскохозяйственная техника, включающая в себя трактор, на который навешивают автоматизированные почвообрабатывающие агрегаты, посадочные и поливные агрегаты, автоматизированные машины по внесению жидких удобрений, автоматизированные агрегаты по обработке растений пестицидами, автоматизированные культиваторы и прореживатели, самоходные автоматизированные уборочные машины. Сельскохозяйственную машину, выполняющую измерительные проходы (на чертеже условно не показана) оборудуют системой пространственного позиционирования, включающей в себя двухстепенной гироскоп 1 с датчиками 2, 3, а также магнитный компас 4 с датчиком 5, одностепенной гироскоп 6 с датчиком 7, кинематический датчик пути 8, оснащенный счислителем 9. Для измерения состояния растений машину оборудуют телекамерой 10, а для измерения содержания химических элементов питания N,P,K-спектральным электронным фотометром 11, имеющим излучатель 12 и приемник 13. Для измерения влажности почвенной среды машину оборудуют диэлькометрическим датчиком 14, оборудованным излучателем 15 и приемником 16 высокочастотных колебаний, в основаниях которых размещены тензометрические датчики 17, предназначенные для измерения плотности почвы. Все датчики, размещенные на сельскохозяйственной машине, подключают к блоку кодирования сигналов 18, который в свою очередь подключают к радиомодему 19. Для приема сигналов от радиомодема 19, размещенного на сельскохозяйственной машине, на стационарный компьютер 20, его оборудуют собственным радиомодемом 21. Для реализации способа необходима собственная метеостанция, которую оборудуют датчиками температуры 22, солнечной радиации 23 и интенсивности осадков 24, которые подключают к нормирующему преобразователю сигналов 25, а его в свою очередь подключают к стационарному компьютеру 20. Сельскохозяйственную машину 26, выполняющую технологические операции, оборудуют системой определения пространственных координат, включая двухстепенной гироскоп 1 с датчиками 2, 3; магнитный компас 4 с датчиком 5; двухстепенной гороскоп 6 с датчиком 7; кинематический датчик 8 со счислителем пути 9; блок преобразования сигналов 18 и радиомодем 19, подключаемый к бортовому компьютеру 27. Кроме того, машину 26 оборудуют технологическим орудием 28, рабочие органы 29 которого непосредственно воздействуют на растения и почву. Величину такого воздействия изменяют посредством исполнительного механизма 30, который подключают к бортовому компьютеру 27. Перед началом очередного вегетационного периода, по информации о реальном урожае, агрофизических параметрах почвы и климатических параметрах, полученной на предыдущем периоде вегетации, определяют параметры математической модели, определяющей изменения в суточном масштабе времени средних по площади поля показателей развития растений и физических параметров почвы в зависимости от природно-климатических факторов и параметров технологических операций: t и математическую модель метеоусловий: где t Х-[7×1] - вектор средних по полю показателей развития растений и параметров почвенной среды, компонентами которого являются: х 1 - общая биомасса растений на единице площади, х 2 - масса урожая на единице площади, x3 - плотность почвы, x4 - влажность почвы, x5 - содержание химического элемента N в почве, x6 - содержание химического элемента Р в почве, х7 - содержание химического элемента К в почве; А[1×7], В[7×3], С[7×3], D[7×2] - матрицы параметров модели; U(t)-[3×1] - векторная оптимальная программа изменения параметров технологических операций, выполняемых в период вегетации, в состав которой входят: F(t)-[3×1] - вектор климатических возмущений, компонентами которого являются: f1(t) - температура воздушной среды, f2(t) - уровень солнечной радиации, f3(t) - интенсивность осадков; g-[2×1] - вектор средних по широте и долготе пространственных градиентов; Р - матрица параметров модели метеоусловий. Кроме вида и значений параметров математической модели для реализации способа используют информацию о ценах: c - рыночная стоимость урожая; R - вектор стоимостей параметров технологических операций; r - вектор текущих затрат на формирование урожая. С учетом наличия исходной информации определяют оптимальную с точки зрения экономической целесообразности программу изменения средних по полю показателей развития растений и параметров почвенной среды путем поиска максимума по параметрам технологических операций следующего критерия оптимальности Q(T): где Т - символ транспонирования вектора или матрицы, Для этого реализуют следующую последовательность вычислительных операций: 1. Для заданной длины интервала вегетации t 2. Принимают начальное приближение оптимальной программы изменения параметров технологических операций: t после чего определяют величину критерия оптимальности 3. В направлении от конца вегетационного периода к его началу определяют программу вспомогательных переменных, определяющих влияние программы параметров технологических операций на показатели развития растений и физические параметры почвы 4. По программе вспомогательных переменных определяют поправки оптимальной программы параметров технологических операций 5. Уточняют оптимальную программу параметров с учетом величины поправки и заданной области ограничений U*(t)k+1=U*(t)k , если U*(t)k+1 6. Определяют новое значение критерия оптимальности и его приращение 7. Если полученное приращение 8. Если полученное приращение Полученные оптимальные программы параметров технологических операций U *(t) и показателей развития растений и физических параметров почвы Х*(t) фиксируют в памяти стационарного компьютера 20. В реальном времени, перед выполнением очередной технологической операции, очередность которой определена оптимальной программой U*(t), осуществляют измерительный проход сельскохозяйственной машины без орудия. Проход начинают от исходной точки поля, плоские пространственные координаты, широта s0 и долгота d 0 известны. Во время прохода посредством кинематического датчика 8 и счислителя пути 9 измеряют пройденный путь L в произвольном направлении, определяемом технологическими требованиями. Величина пути фиксируется через заданные дискретные промежутки времени (0, Т), обозначаемые номерами k. Одновременно двухстепенным гироскопом 1 посредством датчика 2 измеряют абсолютный курс Кроме того, двухстепенным гироскопом 1 посредством датчика 3 определяют продольный угол наклона к горизонту На основании средних значений географического курса, углов продольного и поперечного наклона машины к горизонту определяют пространственные координаты машины в дискретных точках фиксации, представляющих собой малые фрагменты поверхности поля: где s(k), d(k), h(k) - географические широта, долгота и геодезическая высота в точке фиксации; g1(k), g2(t) - средние градиенты рельефа поля в продольном и поперечном направлениях. Для каждой точки фиксации пространственных координат телекамерой 10 фиксируют электронные изображения растений i(k), а электронным спектрофотометром 11 за счет излучателя 12 и приемника 13 ведут сканирование поверхности поля в зоне фиксации j(k). Одновременно при движении машины датчик 14 погружается в почвенную среду и за счет взаимодействия излучателя 15 и приемника 16 измеряет влажность почвы в корнеобитаемом слое w(k), а за счет малой деформации тензодатчиков 17 измеряют плотность почвы в корнеобитаемом слое p(k). Все сигналы о пространственных координатах s(k), d(k), h(k), g1(k), g2 (k), a также изображения растений i(k), спектральные электронные фотографии поверхности почвы j(k), влажности w(k) и плотности p(k) почвы поступают на вход нормирующего преобразователя 18, где они преобразуются в цифровой код, поступающий на радиомодем 19, посредством которого всю информацию посылают на приемный радиомодем 21 стационарного компьютера 20, где она фиксируется в оперативной базе данных. На основании этих сигналов, после прохождения машиной всего поля, оценивают оперативное значение всех компонент вектора показателей развития растений и параметров почвенной среды X(k) во всех малых фрагментах поверхности поля и среднего по полю вектора пространственных градиентов g. Измеренные значения векторов показателей развития растений и параметров почвенной среды для каждого малого фрагмента поля X(k) сравнивают с оптимальными средними значениями Х* (t), по результатам сравнения формируют поправки к средним оптимальным значениям параметров технологических воздействий по закону которые заносят в оперативную базу данных компьютера 20. Одновременно с полевыми измерениями на стационарной метеостанции производят измерение температуры f1(t) датчиком 22, уровня солнечной радиации f2(t) датчиком 23 и интенсивности осадков f3(t) датчиком 24. Эти сигналы поступают на второй нормирующий преобразователь 25, где они преобразуются в цифровой код и поступают на стационарный компьютер 20. Здесь они усредняются на суточном интервале времени и сравниваются с прогнозными значениями метеоусловий, формируемыми моделью, и в случае их различия по ним уточняют параметры модели метеоусловий F(t)=Ф(t)Р. При уточнении параметров модели метеоусловий повторяют всю последовательность операций (3)-(10) по формированию оптимальных программ выполнения технологических операций, в результате чего получают новые оптимальные значения оптимальных программ параметров технологических операций U*(t) и показателей развития растений и физических параметров почвы Х*(t), которые фиксируют в памяти компьютера 20 вместо предыдущих программ. В момент выполнения технологических операций сельскохозяйственная машина 26 с орудием 28 перемещается по полю, начиная от исходной точки с известными пространственными координатами, широтой s 0 и долготой d0. При движении машины по полю измеряют только плоские пространственные координаты s(k), d(k), широту и долготу соответственно, которые посылают через радиомодемы 19, 21 на стационарный компьютер 20. Для измеренных значений плоских пространственных координат из базы данных извлекают поправки к средним оптимальным значениям параметров технологических воздействий Источники информации 1. Бондаренко Н.Ф., Жуковский Е.Е., Кащенко А.С. и др. Высокие урожаи по программе. Лениздат, 1986, с.13-30. 2. Дифференцированное применение удобрений в системе координатного земледелия. Аналитическая справка (обзор). М.: Информагротех, №6-1, 2002, с.9-10. Формула изобретения1. Способ автоматизированного управления формированием урожая, включающий в себя операции по получению информации о физических свойствах, химическом составе почвы и о погодных условиях на сельскохозяйственном поле, а также информации о фактическом урожае за предыдущий год на каждом малом фрагменте сельскохозяйственного поля, сопоставляемой с сигналами системы определения пространственных координат во время уборки урожая, использование математических моделей влияния почвенных и климатических факторов на конечный урожай, производство расчетов по параметрам основных технологий перед посевом растений и выполнение технологических воздействий в реальном времени в соответствии с этими расчетами для каждого малого фрагмента сельскохозяйственного поля, отличающийся тем, что перед началом периода вегетации определяют оптимальную программу изменения средних по полю показателей развития растений и параметров почвенной среды путем поиска максимума по параметрам технологических операций критерия оптимальности, учитывающего разность между стоимостью урожая и затратами на его получение, в реальном времени перед выполнением каждой технологической операции первым измерительным проходом сельскохозяйственной машины без орудий измеряют ее пространственные координаты, для чего одновременно используют сигналы кинематического счислителя пути относительно исходной точки поля с известными пространственными координатами, двухстепенного гироскопа, определяющего абсолютный курс и угол наклона к горизонту в направлении движения машины, магнитного компаса, определяющего магнитный курс сельскохозяйственной машины и одностепенного гироскопа, определяющего угол поперечного крена машины; одновременно при прохождении машины с заданным периодом дискретизации поверхности поля производят телевизионную съемку растений, спектральную фотоэлектронную съемку поверхности почвы, измерение влажности и плотности почвы, все измеренные сигналы посредством радиомодемной связи передают от сельскохозяйственной машины на стационарный компьютер, где оценивают текущие показатели развития растений и параметров почвенной среды и фиксируют в его памяти, куда же одновременно подают сигналы от метеостанции о температуре окружающего воздуха, уровне солнечной радиации, интенсивности осадков, по измеренной информации уточняют параметры моделей растений и почвенной среды, вторым рабочим проходом сельскохозяйственной машины с орудиями измеряют ее пространственные координаты, сигналы по радиомодемной связи передают на стационарный компьютер, где для каждого малого фрагмента поля сравнивают измеренные значения показателей развития растений и параметров почвенной среды, полученные при первом проходе, с их оптимальными средними значениями, по результатам сравнения формируют поправки к средним оптимальным значениям параметров технологических воздействий, для каждого малого фрагмента поля определяют размер общего технологического воздействия, складывающий из оптимального среднего и локальной поправки, которое по модемной связи передается в форме задания бортовому регулятору орудия машины, осуществляющего технологическое воздействие. 2. Способ по п.1, отличающийся тем, что измеренные значения температуры окружающего воздуха, уровня солнечной радиации и интенсивности осадков усредняют на суточном интервале времени и сравнивают с прогнозными значениями метеоусловий, формируемыми моделью, и в случае их различия по ним уточняют параметры модели метеоусловий; при уточнении параметров модели метеоусловий повторяют всю последовательность операций по формированию оптимальных программ выполнения технологических операций, в результате чего получают новые значения оптимальных программ параметров технологических операций и показателей развития растений и физических параметров почвы, которые фиксируют в памяти стационарного компьютера вместо предыдущих программ. 3. Способ по п.1, отличающийся тем, что измерение влажности и плотности почвы осуществляют диэлькометрическими датчиками-щупами, которые погружают в почвенную среду во время движения машины и в основаниях которых размещают тензометрические чувствительные элементы. Популярные патенты: 2148319 Растительное средство для борьбы с пресноводными моллюсками ... отмечают 100%-ную гибель моллюсков и 97%-ную гибель их кладок. Эффективность известного моллюскоцида - 5,41-дихлорсалициланилида составляет: при температуре 10-12oC и pH 7,3 - 89%, при температуре 20,0-21,5oC и pH 7,1 - 93-94%. Изучали воздействие препарата ели европейской на низших ракообразных, бентос, рыб, земноводных, растительность. Установлено, что препараты ели вызывают: - гибель низших ракообразных (дафнии, моины, циклопы) - 11-23% (100%)*, - гибель бентоса (олигохеты, хирономиды) - 6-15% (65-84%)*, - гибель рыб только в течение первых часов после внесения препаратов в пруд (100%-ную гибель. Весной-летом действие длится 9-12 дней, а осенью-зимой - 5-6 месяцев)*, - ... 2248687 Способ весеннего боронования озимых культур и зубовая борона для его осуществления ... и заднюю лезвийные кромки, а размещают монтажную часть каждого зуба в раме бороны так, что направления изогнутости его рабочей части и хода бороны противоположны.3. Зубовая борона по п.2, отличающаяся тем, что рабочая часть зуба изогнута относительно его вертикальной плоскости в пределах 15-30°, толщина лезвийных кромок не превышает 2 мм, а длина стержневой и рабочей частей зуба одна и та же. MM4A Досрочное прекращение действия патента Российской Федерации на изобретение из-за неуплаты в установленный срок пошлины за поддержание патента в силе Дата прекращения действия патента: 20.02.2005 Извещение опубликовано: 27.01.2007 БИ: ... 2407282 Способ выращивания корнесобственных саженцев винограда и машина для его осуществления ... рыхлый пласт почвы сдвигается в среднюю часть рыхлой полосы 2, образуя почвенный вал 12. Высоту почвенного вала 12 (см. последовательно фиг.3, 4 и 5) увеличивают левым отвалом 13 и правым отвалом 14 (фиг.1 и 2). Отвалами 13 и 14 формируются откосы 15 и 16 (фиг.5). Левый ряд почвообрабатывающих рабочих органов из стойки 3 с долотом 4, дискового рабочего органа 8 на стойке 10 и левого отвала 13 смещен вперед по направлению движения рамы 17 машины для поделки широких плоских гребней 5 под высадку черенков 1 с междурядьем не менее t=0,70 м относительно правого ряда рабочих органов из стойки 3 с долотом 4, дискового рабочего органа 9 на стойке 11 и правого отвала 14.Описанным ... 2076594 Установка для промышленного разведения дождевых червей ... а затем подается в тоннель. В холодное время года в аварийном порядке трубы 39 теплообменника тоннеля могут быть подключены к дополнительному источнику теплой воды. А для уменьшения расхода энергии желательно, чтобы над тоннелем был большой (1,5-3 м) слой субстрата или смеси навоза с соломой. От величины перемещения поддонов в тоннеле зависит степень переработки субстрата в биакугумус и количества полученных при этом дождевых червей. Производительность по биакгумусу и дождевым червям зависит от длины тоннеля и его сечения. Установка позволяет в широких пределах изменять величину перемещения за один цикл и количество циклов за один месяц и год, что обеспечивает любую ... 2490869 Способ направленного изменения циркуляции воздушных масс и связанных с ней погодных условий ... термодинамические процессы, изменяющие погодные условия (RU 2144760 С2, МПК 8 A01G/15, опубл. 27.01.2000).Наиболее близким аналогом к изобретению является способ изменения погодных условий в пределах заданного пространства, при котором с помощью коронирующего электрода в атмосферный воздух генерируют однополярные ионы, нарушая естественную циркуляцию воздушных масс на различных высотах в разных пространственных масштабах над территорией в пределах от единиц до тысяч километров, при этом дозируют время действия восходящего потока от нескольких часов до нескольких суток в зависимости от естественного метеорологического фона и результатов оценки изменения атмосферной циркуляции (RU ... |
Еще из этого раздела: 2288561 Устройство для предпосевной обработки семян растений 2411718 Устройство для внутрипочвенного импульсного дискретного полива растений 2479198 Способ ведения сильнорослых сортов винограда 2056737 Способ диагностики морозоустойчивости плодовых культур 2272840 Способ молекулярного маркирования пола хмеля обыкновенного (humulus lupulus l) 2093016 Устройство для водоподачи 2106082 Устройство для укладки подстилочного навоза в бурт 2066320 Производные тиазола, способ их получения и способ борьбы с грибками 2108013 Рабочий орган культиватора 2084132 Устройство для выращивания растений |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||

 (t 0, T); X(t0)=X0;
(t 0, T); X(t0)=X0;
 - интенсивность поливов,
- интенсивность поливов, - интенсивность внесения минеральных удобрений,
- интенсивность внесения минеральных удобрений, - интенсивность механических воздействий на почву (обработок);
- интенсивность механических воздействий на почву (обработок);  - матрица базовых функций для прогнозирования метеоусловий;
- матрица базовых функций для прогнозирования метеоусловий;
 - область ограничений на параметры технологических операций.
- область ограничений на параметры технологических операций. , k=0 и осуществляют прогноз показателей развития растений и физических параметров почвы
, k=0 и осуществляют прогноз показателей развития растений и физических параметров почвы







 Q k меньше заданной величины
Q k меньше заданной величины  , то оптимальную программу параметров технологических операций U*(t) считают найденной и ее подставляют в модель (4), в результате получают оптимальную программу показателей развития растений и физических параметров почвы Х* (t), обеспечивающих экономически целесообразный урожай в конце интервала вегетации
, то оптимальную программу параметров технологических операций U*(t) считают найденной и ее подставляют в модель (4), в результате получают оптимальную программу показателей развития растений и физических параметров почвы Х* (t), обеспечивающих экономически целесообразный урожай в конце интервала вегетации  .
. г(t), магнитным компасом 4 посредством датчика 5 определяют магнитный курс
г(t), магнитным компасом 4 посредством датчика 5 определяют магнитный курс  вычитают из сигнала абсолютного курса
вычитают из сигнала абсолютного курса  , который вычитают из сигнала абсолютного курса
, который вычитают из сигнала абсолютного курса  .
. (t), который усредняют на интервале фиксации пути (0, Т)
(t), который усредняют на интервале фиксации пути (0, Т)  , а одностепенным гироскопом 6 посредством датчика 7 определяют угол поперечного крена машины к горизонту
, а одностепенным гироскопом 6 посредством датчика 7 определяют угол поперечного крена машины к горизонту  (t), который усредняют на интервале фиксации пути (0, Т)
(t), который усредняют на интервале фиксации пути (0, Т)  .
.