Манипулятор машины для обработки деревьевПатент на изобретение №: 2251479 Автор: Анисимов С.Е. (RU), Мазуркин П.М. (RU), Мельникова А.В. (RU) Патентообладатель: Марийский государственный технический университет (RU) Дата публикации: 10 Мая, 2005 Начало действия патента: 6 Мая, 2003 Адрес для переписки: 424024, г.Йошкар-Ола, пл. Ленина, 3, МарГТУ, отдел интеллектуальной собственности Изображения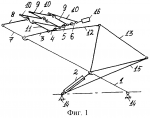 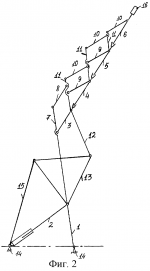 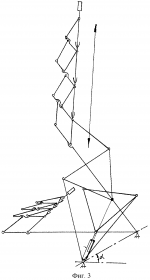 Изобретение относится к лесному машиностроению и может быть использовано в лесном хозяйстве при обработке растущих деревьев. Сущность изобретения заключается в том, что к стреле шарнирно прикреплена многозвенная телескопическая рукоять с шарнирно сочлененной фермой, у которой каждый двухзвенник, кроме последнего, снабжен дополнительным звеном. Дополнительные звенья установлены параллельно второму звену двухзвенника и соединены с первым поворотным звеном соседнего двухзвенника для образования пантографа. К опорной секции телескопической рукояти шарнирно закреплена тяга, которая через звено жесткого треугольника шарнирно соединена со стрелой. Вершина, противолежащая данному звену жесткого треугольника, посредством рычага соединена шарнирно с платформой машины. Кроме того, для перемещения рабочего органа по вертикали шарниры опор на платформе машины установлены относительно друг друга под углом Изобретение относится к лесному машиностроению и может быть использовано в лесном хозяйстве при обработке растущих деревьев (срезание нижних ветвей при уходе за деревом, обрезка кроны при ландшафтной лесообработке, заготовка черенков с элитных деревьев и др.) и при заготовке сортиментов непосредственно со стоящих деревьев, отведенных в рубку. Известна машина для обработки деревьев на базе автомобильного подъемника АГП-28 (см. книгу: Мазуркин П.М., В.М.Пинчук, В.И.Котиков Манипуляторные кусторезы. - Йошкар-Ола: издание МарПИ 1992. - с.87, рис.5.10), включающая трелевочный трактор, подъемник типа АГП, поворотную платформу, штангу, рабочий орган. Недостатком является сложность наводки рабочего органа одновременно двумя гидроцилиндрами подъемника, из-за чего снижается маневренность манипулирования и низкая маневренность в лесу. Известен подъемник прицепной коленчатый (см. рекламный проспект ППК-6-12-500, авторы Ж.Ж.Байгунченков, С.У.Джолдасбеков, Б.И.Журсенбаев и др.) включающий платформу, стрелу и рукоять, представляющие собой шарнирно-рычажное устройство и прямолинейно-направляющий механизм с контурными подвижными звеньями и гидроцилиндр перемещения стрелы. Недостатком является незначительный вылет (высота подъема) рабочего органа. Технический результат - увеличение вылета (высоты подъема) рабочего органа. Этот технический результат достигается тем, что к стреле шарнирно прикреплена многозвенная телескопическая рукоять с шарнирно-сочлененной фермой, у которой каждый двухзвенник, кроме последнего, снабжен дополнительным звеном, которое установлено параллельно второму звену двухзвенника и соединено с первым поворотным звеном соседнего двухзвенника для образования пантографа (по патенту №2135347 RU, МКИ8 В 25 J 5/2, В 66 с 23/687, 23/68 // А 01 G 23/08 Манипулятор машины для обработки деревьев / П.М.Мазуркин, С.Е.Анисимов - № 98111805/13, заявлено 15.06.98; опубл. 27.08.99. - 6 с.). К опорной секции телескопической рукояти шарнирно закреплена тяга, которая через звено жесткого треугольника шарнирно соединена со стрелой. Вершина, противолежащая звену жесткого треугольника, посредством рычага соединена шарнирно с платформой машины. Опорные шарниры платформы могут быть расположены под разными углами к горизонту, что позволяет создавать вышки - подъемники на короткобазовых колесных шасси. При этом рабочий орган в виде люльки или рабочий орган, например пильный механизм, будет подниматься вдоль ствола дерева. Сущность технического решения заключается в том, что увеличивается вылет рабочего органа манипулятора при его доставке к месту обработки, например, растущего дерева. Совокупность функционально-конструктивных признаков, изложенных в техническом решении, позволяет увеличить вылет рабочего органа манипулятора при его доставке к месту обработки, например, растущего дерева. На фиг.1 показана схема конструкции манипулятора для обработки деревьев (при втянутом положении подвижных секций телескопической рукояти); на фиг.2 - то же, при вытянутом положении подвижных секций телескопической рукояти, на фиг.3 показана траектория вертикального движения рабочего органа. Манипулятор машины для обработки деревьев включает стрелу 1, гидроцилиндр 2 перемещения стрелы. К стреле шарнирно прикреплена телескопическая рукоять с опорной секцией 3 и подвижными секциями 4, 5 и 6. На гуське 7 стрелы шарнирно закреплена тяга 8, соединенная с шарнирно-сочлененной фермой. Ферма содержит двухзвенники. Каждый двухзвенник, кроме последнего, снабжен дополнительным звеном 9, которое установлено параллельно второму звену 10 двухзвенника и соединено с первым поворотным звеном 11 соседнего двухзвенника для образования пантографа. Шарнирно-сочлененная ферма, опорная секция 3 и подвижные секции 4, 5 и 6 совместно образуют телескопическую рукоять. К опорной секции 3 шарнирно закреплена тяга 12, которая через звено 13 жесткого треугольника шарнирно соединена со стрелой 1. Вершина, противолежащая звену 13 жесткого треугольника, посредством рычага 15 соединена шарнирно с платформой 14 машины. На конце рукояти установлен рабочий орган 16. Стрела 1 и гидроцилиндр 2 установлены на платформе 14 машины. Манипулятор машины работает следующим образом. Рабочий орган 16 необходимо доставить, например, на заданную высоту при вертикальном перемещении. Для этого поворотом платформы 14 машины и гидроцилиндром 2 устанавливают стрелу 1. При этом рычаг 15 изменяет положение вершины жесткого треугольника, звено 13 которого воздействует на опорную секцию 3 телескопической рукояти через тягу 12. Опорная секция 3 телескопической рукояти поворачивается относительно оси крепления к стреле. При этом тяга 8 воздействует на шарнирно-сочлененную ферму, двухзвенники которой выдвигают подвижные секции 4, 5 и 6 относительно опорной секции 3 телескопической рукояти. При втягивании штока гидроцилиндра 1 общая рукоять складывается, а стрела занимает первоначальное положение. Предложенное изобретение позволяет создавать машины для вертикальной доставки люльки с рабочим или с рабочим органом на заданную высоту. Формула изобретения1. Манипулятор машины для обработки деревьев, содержащий платформу, стрелу и рукоять, представляющие собой шарнирно-рычажное устройство, прямолинейно-направляющий механизм с контурными подвижными звеньями и гидроцилиндр перемещения стрелы, отличающийся тем, что к стреле шарнирно прикреплена многозвенная телескопическая рукоять с шарнирно сочлененной фермой, у которой каждый двухзвенник, кроме последнего, снабжен дополнительным звеном, которое установлено параллельно второму звену двухзвенника и соединено с первым поворотным звеном соседнего двухзвенника для образования пантографа, а к опорной секции телескопической рукояти шарнирно закреплена тяга, которая через звено жесткого треугольника шарнирно соединена со стрелой, а вершина, противолежащая данному звену жесткого треугольника, посредством рычага соединена шарнирно с платформой машины. 2. Манипулятор машины по п.1, отличающийся тем, что для перемещения рабочего органа по вертикали шарниры опор на платформе машины установлены относительно друг друга под углом MM4A Досрочное прекращение действия патента Российской Федерации на изобретение из-за неуплаты в установленный срок пошлины за поддержание патента в силе Дата прекращения действия патента: 07.05.2005 Извещение опубликовано: 27.01.2007 БИ: 03/2007 Популярные патенты: 2200947 Способ количественной оценки лесопригодности почвогрунтов ... с нормой осадков от 300 до 500 мм/год нарушенные незасоленные песчаные, супесчаные и легкосуглинистые почвогрунты отводят под массивное облесение сосной обыкновенной. Лесопригодность их в различных условиях атмосферного увлажнения существенно отличается и нуждается в объективной оценке при планировании лесохозяйственных работ. Толщину корнеобитаемого слоя у сосны на рассматриваемых почвогрунтах принимают равной 2 метрам, минимальный запас сырой хвои в насаждении (Хв), имеющем сомкнутый полог - 7,5 т/га, коэффициент допустимого снижения влагопотребления сосны (Кс) - 0,5, среднюю продолжительность жизни древостоев - 100 лет, а уровень значимости событий при расчете минимальных и ... 2123784 Сетное каскадное устройство для промысла поверхностных объектов лова ... крылом в единое орудие лова с входными устройствами, образованными крылом, усынками и подъемной дорогой ("Сетное устройство для лова рыбы", патент СССР N 1771410 от 22.06.92 г., МКИ A 01 K 69/10). Это орудие лова может устанавливаться на глубинах в диапазоне шельфа, а конструкция и оснастка позволяет облавливать только донные виды рыб в диапазоне высоты крыла и ловушки. Технический результат обеспечиваемый изобретением, заключается в расширении функциональных возможностей за счет облова поверхностных рыб и моллюсков в океаническом и прибрежном рыболовстве и повышении уловистости орудия лова за счет введения в орудие лова контрольной ловушки и определения с ее помощью направления ... 2215407 Способ создания исходного материала для селекции растений ... Известен способ селекции растений, включающий скрещивание искусственно измененной формы и исходного сорта, отбор ценных форм среди гибридов и их размножение, причем в качестве искусственно измененной формы используют миксоплоиды, которые в скрещивании участвуют в качестве материнского компонента. Необходимый миксоплоид, например пшеницы, получают экспериментальным замачиванием сухих семян в водном растворе 5%-ного колхицина в течение 24 ч при 25oС и высева их на постоянное место в поле без предварительной промывки в воде (А. с. СССР 1292681, А 01 Н 1/04, публ. 28.02.87 г., Бюлл. 8). Недостатком известного способа является то, что в качестве искусственно измененной формы для ... 2106082 Устройство для укладки подстилочного навоза в бурт ... или порциями. Транспортная тележка способна разгружать навоз частями. По заполнению камеры полностью подстилочным навозом буртоукладчик с помощью отталкивающего устройства (силовых винтов 9) перемещается в новое положение, при этом плита 11 (передняя стенка камеры) упирается в навозную массу и дополнительно уплотняет ее и по достижению для упора плотности начинает перемещать буртоукладчик вперед в новое положение. Рабочая длина домкратных винтов равна 1 м, предусмотрено, что каждое перемещение, с учетом уплотнения навозной массы на 200 мм, было равным 0,8 м. Размеры высоты бортов камеры, ширина камеры подобраны такими, чтобы при перемещении буртоукладчика на 0,8 м свободный ... 2064741 Устройство для обработки почвы ... для давления на опорные поверхности выглубления рабочих органов в соответствии с положением звеньев гусеничного обвода. 6. Устройство по п.1, отличающееся тем, что средства для выглубления рабочих органов включают прикрепленное к раме лекало выглубления рабочих органов для давления на опорные поверхности выглубления рабочих органов или на опорные поверхности гусеничного обвода. 7. Устройство по п.1, отличающееся тем, что снаружи гусеничного обвода к раме прикреплен отражатель для устранения заедания рабочих органов. 8. Устройство по п.1, отличающееся тем, что рабочий орган выполнен с переменным радиальным сечением клина. 9. Устройство по п.1, отличающееся тем, что радиальные ... |
Еще из этого раздела: 2189742 Способ обработки инкубационных яиц 2091023 Способ защиты растений от заболеваний, вызванных нематодами 2108700 Способ оценки горных сенокосов и пастбищ 2154940 Способ получения, содержания и хранения живого корма для биологических объектов птиц и рыб 2167648 Средство для защиты от укусов кровососущих насекомых (варианты) и способ его получения 2149547 Пневматический опрыскиватель 2028749 Капустоуборочная машина 2267924 Способ стимулирования роста растений 2261583 Выгрузное устройство бункера зерноуборочного комбайна 2263431 Устройство для предпосевной обработки семян |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||
 . Технический результат изобретения состоит в увеличении вылета рабочего органа манипулятора. 1 з.п. ф-лы. 3 ил.
. Технический результат изобретения состоит в увеличении вылета рабочего органа манипулятора. 1 з.п. ф-лы. 3 ил.