Ручное почвообрабатывающее орудиеПатент на изобретение №: 2231943 Автор: Шахов В.Л. (RU) Патентообладатель: Шахов Владимир Леонидович (RU) Дата публикации: 20 Февраля, 2004 Начало действия патента: 19 Августа, 2002 Адрес для переписки: 400006, г.Волгоград, ул. Дегтярева, 35, кв.107, В.Л. Шахову Изображения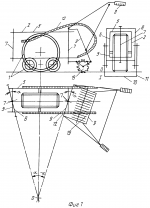 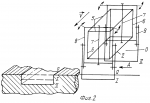 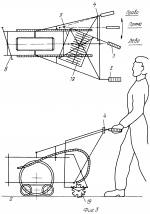 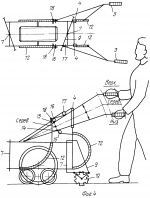 Изобретение относится к малогабаритной почвообрабатывающей технике и может использоваться для междурядий обработки сельскохозяйственных культур или почвы в садах, на приусадебных участках, в теплицах. Ручное орудие, включает тележку, на раме которой установлен двигатель, рабочий орган и рычаги управления. На раме впереди и сзади тележки по оси симметрии расположены вертикальные оси-валы. На валах смонтированы вертикальные рамы с возможностью поворота в горизонтальной плоскости. Рабочие органы состоят из горизонтальной подрезающей рабочей части и боковых вертикально разрезающих почву ножей. Рабочие органы закреплены на рамах, соединенных с рычагами управления и между собой с помощью жестких или гибких тяг. Соединения тяг с рамами имеют разные варианты выполнения. Ножи снабжены дисками-очистителями и устройством для сообщения ножам колебательных движений для снижения тягового сопротивления рабочих органов. Приведена кинематическая схема передачи от двигателя орудия вращательного движения дискам-очистителям и колебательных движений ножам. Такое конструктивное выполнение позволит снизить усилия оператора и повысить маневренность орудия при одновременном снижении нагрузки на двигатель за счет уменьшения угла поворота рабочих органов при обеспечении заданного радиуса поворота орудия. 16 з.п. ф-лы, 13 ил. Заявляемое изобретение относится к сельскохозяйственному машиностроению, а именно к малогабаритной почвообрабатывающей технике, и может использоваться для междурядной обработки сельскохозяйственных культур, а также для обработки почвы в садах, на приусадебных участках, в теплицах и т.д. как самоходное, так и несамоходное.Известно ручное почвообрабатывающее орудие, включающее тележку, на раме которой установлены двигатель и рабочий орган (А.С. СССР №1489595, А 01 В 39/06, 1989 г.).Недостатком его является низкая маневренность, необходимая для качественной обработки почвы. Это объясняется большим радиусом поворота орудия, и при маневрировании оператору необходимо приподнимать и поворачивать орудие, выводя из контакта с землей рабочий орган и ведущее колесо, что требует больших усилий оператора и нарушает глубину вспашки.Известно ручное почвообрабатывающее орудие, включающее тележку и установленные на ней двигатель, рабочий орган и рычаги управления (А.С. СССР №1178336, А 01 В 3/50, 3/58, 1985 г.).Преимуществом его является снижение бокового усилия оператора, приложенного к рычагам управления, на величину усилия, необходимого для сдвига слоя земли рабочим органом без его выглубления.Его недостаток заключается в том, что для выдерживания нужного направления при прямолинейном движении оператор должен прикладывать постоянные боковые усилия для компенсации реакции почвы на рабочий орган, а при маневрировании он должен постоянно затрачивать усилия на разворот мотоблока. Кроме того, при больших углах поворота резко возрастает реакция почвы на рабочий орган, что повышает нагрузку на двигатель и снижает надежность его работы.Наиболее близким к заявляемому является ручное почвообрабатывающее орудие, включающее тележку, на раме которой установлены двигатель, рабочий орган и рычаги управления (А.с. СССР №917715, А 01 В 3/58, 1982 г. - прототип).Преимуществом его является то, что рычаги управления соединены с рабочим органом, что позволяет использовать его в качестве регулятора направления движения орудия и производить маневрирование орудием без выглубления рабочего органа.Его недостаток заключается в том, что при маневрировании резко возрастает реакция почвы на рабочий орган, что повышает нагрузку на двигатель и снижает надежность его работы, а также требует больших усилий оператора для компенсации реакции почвы на рабочий орган как при прямолинейном движении для обеспечения постоянства направления движения, так и при поворотах.Задачей заявляемого изобретения является снижение усилий оператора и повышение маневренности орудия при одновременном снижении нагрузки на двигатель.Поставленная задача решается тем, что в ручном почвообрабатывающем орудии, включающем тележку, на раме которой установлены двигатель, рабочий орган и рычаги управления, на раме впереди и сзади тележки по оси симметрии расположены вертикальные оси, на которых смонтированы вертикальные рамы с возможностью поворота в горизонтальной плоскости, рабочие органы состоят из горизонтальной подрезающей рабочей части и боковых вертикально разрезающих почву ножей, закрепленных на вертикальных рамах, соединенных с рычагами управления и между собой с помощью жестких или гибких тяг.Поставленная задача решается также тем, что в ручном почвообрабатывающем орудии рама тележки выполнена призматической формы и образована из горизонтальных элементов, жестко соединенных вертикальными стойками.Поставленная задача решается также тем, что в ручном почвообрабатывающем орудии тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены жесткими или гибкими, расположены перекрестно и шарнирно закреплены на внутренних поверхностях диагонально расположенных вертикальных стоек рам, одна из которых соединена с рычагами управления с возможностью поворота рам в разные стороны.Поставленная задача решается также тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены жесткими или гибкими, расположены параллельно и шарнирно закреплены на внутренних поверхностях противолежащих вертикальных стоек рам, одна из которых соединена с рычагами управления с возможностью поворота рам в одну сторону.Поставленная задача решается также тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены жесткими или гибкими, одними концами шарнирно закреплены на внутренних поверхностях вертикальных стоек рам, а свободные концы тяг противолежащих стоек шарнирно закреплены на промежуточных звеньях, смонтированных на общем валу, установленном на раме тележки с возможностью вращения и соединенном с рычагами управления с возможностью поворота рам в разные стороны.Поставленная задача решается также тем, что в ручном почвообрабатывающем орудии тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены жесткими или гибкими, расположены параллельно и шарнирно закреплены на внутренних поверхностях противолежащих вертикальных стоек рам, одна из которых соединена с рычагами управления с возможностью поворота рам в одну сторону.Поставленная задача решается также тем, что в ручном почвообрабатывающем орудии тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены жесткими или гибкими, одними концами шарнирно закреплены на внутренних поверхностях вертикальных стоек рам, а свободные концы тяг противолежащих стоек шарнирно закреплены на промежуточных звеньях, смонтированных на осях, каждое звено на своей оси; установленных на раме тележки с возможностью вращения и соединенных с рычагами управления с возможностью поворота рам в разные стороны.Поставленная задача решается также тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены жесткими или гибкими, одними концами шарнирно закреплены на внутренних поверхностях вертикальных стоек рам, а свободные концы тяг противолежащих стоек шарнирно закреплены на промежуточных звеньях, смонтированных на осях, каждое звено на своей оси; установленных на раме тележки с возможностью вращения и соединенных с рычагами управления с возможностью поворота рам в одну сторону.Поставленная задача решается также тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены из гибких тросов в оболочке, расположены параллельно и закреплены одними концами на внутренних поверхностях вертикальных стоек одной рамы, а другими концами на наружной поверхности противолежащих вертикальных стоек другой рамы, причем одна из рам соединена с рычагами управления с возможностью их поворота в разные стороны.Поставленная задача решается также тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены из гибких тросов в оболочке, расположены перекрестно и закреплены одними концами на внутренних поверхностях вертикальных стоек одной рамы, а другими концами на наружной поверхности диагонально расположенных вертикальных стоек другой рамы, причем одна из рам соединена с рычагами управления с возможностью их поворота в одну сторону.Поставленная задача решается также тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены из гибких тросов в оболочке, присоединены к вертикальным стойкам одной рамы с внутренней, а другой с наружной стороны, причем свободные концы тяг противолежащих вертикальных стоек обеих рам закреплены на одном из разных рычагов управления с возможностью поворота рам в разные стороны.Поставленная задача решается также тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены из гибких тросов в оболочке, присоединены к вертикальным стойкам одной рамы с внутренней, а другой с наружной стороны, причем свободные концы тяг диагонально расположенных вертикальных стоек обеих рам закреплены на одном из разных рычагов управления с возможностью поворота рам в одну сторону.Поставленная задача решается также тем, что тяги передней и задней вертикальных рам выполнены из гибких тросов в оболочке, присоединены к вертикальным стойкам одной рамы с внутренней, а другой с наружной стороны, причем тяги каждой рамы своими свободными концами жестко закреплены на одном из разных рычагов управления с возможностью раздельного регулирования поворотом рам.Поставленная задача решается также тем, что рабочие органы орудия снабжены очистительными устройствами, которые выполнены в виде дисков с режущими зубцами, имеющими одну плоскую поверхность, диски расположены снаружи вертикальных ножей и смонтированы с возможностью вращения на горизонтальных осях, установленных на вертикальных рамах.Поставленная задача решается также тем, что диски-очистители каждого рабочего органа смонтированы на одной горизонтальной оси, связанной с двигателем орудия с возможностью вращения.Поставленная задача решается также тем, что вертикальные ножи рабочих органов закреплены на вертикальных рамах с помощью осей, расположенных выше горизонтальных осей дисков-очистителей, на которых жестко установлены эксцентрики или кулачки с возможностью взаимодействия с задней кромкой вертикальных ножей и сообщения им колебательных движений, а нижняя часть ножей снабжена ограничителем поперечных перемещений.Поставленная задача решается также тем, что вертикальные ножи рабочих органов своей верхней частью закреплены на вертикальных рамах с помощью одной оси, связанной с двигателем орудия, на оси жестко установлены эксцентрики с возможностью взаимодействия с вертикальными ножами и сообщения им колебательных движений, на вертикальных рамах установлены упоры с возможностью взаимодействия с задней кромкой вертикальных ножей, а нижняя часть ножей снабжена ограничителем поперечных перемещений.На вертикальных осях впереди и сзади тележки по оси симметрии смонтированы вертикальные рамы для обеспечения возможности их поворота в горизонтальной плоскости и закрепления на них рабочих органов.Рама тележки выполнена призматической формы для возможности закрепления на ней вертикальных осей и свободного размещения внутри нее перекрестных тяг.Рабочие органы включают горизонтальную подрезающую рабочую часть и боковые вертикально разрезающие почву ножи для установки их под углом к направлению движения орудия, создания усилий его разворота впереди и сзади тележки и уменьшения за счет этого угла поворота рабочих органов при обеспечении заданного радиуса поворота орудия.Передняя и задняя рамы связаны между собой тягами с возможностью поворота в разные стороны для одновременного поворота вертикальных ножей обеих рам, создания двух усилий разворота орудия, действующих в противоположных направлениях относительно оси симметрии, и уменьшения за счет этого угла поворота ножей при обеспечении заданного радиуса поворота орудия в сравнении с одним рабочим органом.Передняя и задняя рамы связаны между собой тягами с возможностью поворота в одну сторону для возможности бокового перемещения орудия без углового разворота корпуса и продольной оси симметрии корпуса орудия, что расширяет его функциональные возможности. Таким образом, предлагаемые отличия сообщают заявляемому объекту новый технический эффект - уменьшение угла поворота рабочих органов при обеспечении заданного радиуса поворота орудия и увеличение вариантов маневрирования за счет регулирования движением орудия двумя рабочими органами.На фиг.1 представлено предлагаемое почвообрабатывающее орудие в трех проекциях при манипулировании одновременно обоими рычагами управления;на фиг.2 - кинематическая схема орудия и разрез почвы с указанием глубины обработки передним и задним ножами;на фиг.3 - предлагаемое орудие в двух проекциях при манипулировании одним рычагом управления;на фиг.4 - предлагаемое орудие в двух проекциях при раздельном манипулировании рычагами управления;на фиг.5 - пространственное положение жестких или гибких тяг, варианты а и b;на фиг.6 - пространственное положение жестких или гибких тяг, вариант с (по вариантам а и b соединения тяг фиг.5) и вариант d (по вариантам соединения тяг а и b фиг.5);на фиг.7 - схема кинематического соединения рам тягами в виде тросов в оболочке, варианты а, b, с, d, e;на фиг.8 - схема маневрирования орудием по вариантам а (фиг.5 и фиг.7) и варианту с (фиг.6 по варианту а - фиг.5) и варианту d (фиг.6 по варианту а - фиг.5) и варианту с (фиг.7) связи вертикальных рам;на фиг.9 - схема маневрирования орудием по вариантам b (фиг.5 и фиг.7) и варианту с (фиг.6 по варианту b - фиг.5) и варианту d (фиг.6 по варианту b - фиг.5) и варианту d (фиг.7) связи вертикальных рам;на фиг.10 - диск-очиститель вертикальных ножей рабочих органов в двух проекциях, вид А на фиг.2;на фиг.11 - предлагаемое орудие в трех проекциях, кинематическая схема передачи колебательных движений рабочим органам и вращательного движения дискам-очистителям от двигателя;на фиг.12 - кинематическая схема (оксанометрия) передачи колебательных движений рабочим органам и вращательного движения дискам-очистителям от двигателя;на фиг.13 - узлы В и В1 на фиг.11 и фиг.12.Орудие состоит из тележки на колесном (или гусеничном) ходу с ведущим колесом 1, на раме 2 которой установлены двигатель (не показан) и рычаги управления движением 3, снабженные ограничителем перемещения - сектором 4, (в варианте на фиг.1 - сектор 4 отсутствует). Рама 2 выполнена призматической формы и образована из горизонтальных элементов 5, жестко соединенных вертикальными стойками 6. На раме 2 впереди и сзади тележки по оси симметрии расположены вертикальные оси-валы 7, на которых навешены вертикальные рамы 8 и 9 с возможностью качания (поворота) в горизонтальной плоскости. Рабочие органы состоят из горизонтальной подрезающей рабочей части 10 и составляющих с ней единое целое боковых вертикально разрезающих почву ножей 11, закрепленных на рамах 8 и 9. Передняя и задняя рамы 8 и 9 соединены между собой тягами 12, которые могут быть жесткими, гибкими или тросами в оболочке.Представлены следующие варианты соединения тяг 12 с вертикальными рамами 8 и 9.1. Вариант а (фиг.5) - тяги 12 выполнены жесткими или гибкими, расположены перекрестно и шарнирно закреплены на внутренних поверхностях диагонально расположенных вертикальных стоек рам 8 и 9, задняя рама 9 соединена с рычагами управления 3.2. Вариант b (фиг.5) - тяги 12 выполнены жесткими или гибкими, расположены параллельно и шарнирно закреплены на внутренних поверхностях противолежащих вертикальных стоек рам 8 и 9, задняя рама 9 соединена с рычагами 3.3. Вариант d (фиг.6 по варианту а - фиг.5) - тяги 12 выполнены жесткими или гибкими, одни концы тяг 12 закреплены на вертикальных стойках рам 8 и 9, а свободные концы тяг противолежащих стоек шарнирно закреплены на промежуточных звеньях 13, расположенных по бокам орудия на общей оси-валу с возможностью поворота звеньев 13 в одну сторону одновременно. Ось-вал расположен выше движителя 1. Звенья 13 могут быть выполнены в виде сектора, где свободные концы жестких тяг 12 каждого борта присоединяются к противоположному (верхнему или нижнему) отверстию сектора. Отверстия сектора расположены по вертикали, проходящей через центр вращения сектора. Если тяги 12 выполнены гибкими (например, в виде троса), то промежуточные звенья 13 выполнены в виде барабана, а тросы тяг 12 рам 8 и 9 к барабану подводятся противоположно сверху или снизу и расположены в вертикальной плоскости, проходящей через центр его вращения.4. Вариант d (фиг.6 по варианту b - фиг.5) - тяги 12 выполнены жесткими или гибкими, одни концы тяг 12 закреплены на вертикальных стойках рам 8 и 9, а свободные концы тяг противолежащих стоек шарнирно закреплены на промежуточных звеньях 13, расположенных по бокам орудия на общей оси-валу с возможностью поворота звеньев 13 в одну сторону одновременно. Ось-вал расположен выше движителя 1. Звенья 13 могут быть выполнены в виде сектора, где свободные концы жестких тяг 12 каждого борта присоединяются к одной, верхней или нижней для каждого борта точке сектора, расположенной по вертикали, проходящей через центр вращения сектора. Если тяги 12 выполнены гибкими (например, в виде троса), то промежуточные звенья 13 выполнены в виде барабана, а тросы тяг 12 рам 8 и 9 к барабану подводятся в одной точке, но противоположно (сверху или снизу плоскости барабана) для каждого борта по-разному, по вертикали, проходящей через центр его вращения.5. Вариант с (фиг.6 по варианту а - фиг.5) тяги 12 выполнены жесткими или гибкими, одни концы тяг 12 закреплены на вертикальных стойках рам 8 и 9, а свободные концы тяг противолежащих стоек шарнирно закреплены на промежуточных звеньях 13, расположенных каждое на своей оси по своему борту (левому или правому) в любом месте на вертикали по боковой поверхности, с возможностью их поворота в разные стороны. Звенья 13 могут быть выполнены в виде сектора, где свободные концы жестких тяг 12 каждого борта присоединяются к противоположному (верхнему или нижнему) отверстию сектора. Отверстия сектора расположены по вертикали, проходящей через центр вращения сектора. Если тяги 12 выполнены гибкими (например, в виде троса), то промежуточные звенья 13 выполнены в виде барабана, а тросы тяг 12 рам 8 и 9 к барабану подводятся одинаково для каждого борта.6. Вариант с (фиг.6 по варианту b - фиг.5) тяги 12 выполнены жесткими или гибкими, одни концы тяг 12 закреплены на вертикальных стойках рам 8 и 9, а свободные концы тяг противолежащих стоек шарнирно закреплены на промежуточных звеньях 13, расположенных каждое на своей оси по своему борту (левому или правому) в любом месте на вертикали по боковой поверхности, с возможностью их поворота в разные стороны. Звенья 13 могут быть выполнены в виде сектора, где свободные концы жестких тяг 12 каждого борта присоединяются к одной (верхней или нижней), для каждого борта одинаково, точке сектора.7. Вариант a (фиг.7) - тяги 12 выполнены из тросов в оболочке, расположены параллельно и закреплены одними концами на внутренних поверхностях вертикальных стоек рамы 8, а другими концами на наружных поверхностях противолежащих вертикальных стоек рамы 9, которая соединена с рычагами 3.8. Вариант b (фиг.7) - тяги 12 выполнены из тросов в оболочке, расположены перекрестно и закреплены одними концами на внутренних поверхностях вертикальных стоек рамы 8, а другими концами на наружных поверхностях диагонально расположенных вертикальных стоек рамы 9, которая соединена с рычагами 3.9. Вариант с (фиг.7) - тяги 12 выполнены из тросов в оболочке, присоединены к вертикальным стойкам рамы 8 с внутренней, а рамы 9 с наружной стороны, причем свободные концы тяг противолежащих вертикальных стоек обеих рам жестко закреплены на одном из разных рычагов управления 3 в точках 14 и 15, при этом тяги левого борта передней рамы 8* закреплены в точке 14 через натяжные отводные ролики 16 и 17, а тяги левого борта задней рамы 9 через отводные ролики 16.10. Вариант d (фиг.7) - тяги 12 выполнены из гибких тросов в оболочке, присоединены к вертикальным стойкам рамы 8 с внутренней, а рамы 9 с наружной стороны, причем свободные концы тяг диагонально расположенных вертикальных стоек обеих рам жестко закреплены на одном из разных рычагов 3 в точках 14 и 15, при этом тяги левого борта передней рамы 8 закреплены в точке 14 через натяжные отводные ролики 16 и 17, а тяги задней рамы 9 закреплены в точке 14 через отводные ролики 16.11. Вариант е (фиг.7) - тяги 12 выполнены из тросов в оболочке, присоединены к вертикальным стойкам рамы 8 с внутренней, а рамы 9 с наружной стороны, причем тяги рамы 8 своими свободными концами жестко закреплены на одном рычаге управления в точке 15 через перекидные ролики 18, а тяги рамы 9 своими свободными концами жестко закреплены на другом рычаге 3 в точке 14 через перекидные ролики 18.Орудие снабжено стабилизатором устойчивости вертикальной оси орудия и заглубления ножей переднего и заднего рабочих органов и может быть выполнено в виде комкодавителя или катка 19, соединенного с задней рамой 9.В другом варианте исполнения (не показан) рукоятки управления 3 закреплены на промежуточных звеньях 13 или на их общем валу (показан на фиг.6). Управление тягами 12 достигается одной или двумя рукоятками управления 3, перемещая их в секторе 4 в вертикальной плоскости.В другом варианте исполнения (не показан) почвообрабатывающее орудие состоит из тележки на колесном (или гусеничном) ходу с ведущим колесом 1, на раме которого установлены двигатель и рукоятки управления 3, снабженные ограничителем перемещения сектором 4. На раме 2 впереди или сзади тележки расположена вертикальная ось 7, на которой смонтирована вертикальная рама 9 с возможностью качания (поворота) в горизонтальной плоскости. Рабочий орган состоит из горизонтальной подрезающей рабочей части 10 и составляющих с ней единое целое вертикально разрезающих почву ножей 11. При расположении оси 7 впереди тележки стабилизатор 19 расположен впереди оси 7.Рабочие органы предлагаемого орудия снабжены дисками-очистителями 20 (фиг.10), которые расположены снаружи вертикальных ножей 11 и жестко закреплены на осях 21, установленных на рамах 8 и 9. Оси 21 могут быть связаны с двигателем орудия с возможностью вращения. По кольцевой наружной поверхности дисков 20 выполнены режущие зубья 22, имеющие режущую кромку m и плоскую кромку без заточки n.Вертикальные ножи 11 рабочих органов могут быть закреплены на рамах 8 и 9 с возможностью поворота на осях 23, расположенных выше осей 21, на которых жестко установлены эксцентрики или кулачки 24 с возможностью взаимодействия с задней кромкой ножей 11, нижняя часть которых снабжена ограничителем поперечных перемещений (не показан), расположенным в плоскости  Z.В другом варианте вертикальные ножи 11 каждого рабочего органа могут быть свободно установлены на одной оси 25, связанной с двигателем орудия, на оси 25 жестко установлены эксцентрики 26, а на вертикальных рамах 8 и 9 - упоры 27 с возможностью взаимодействия с задней кромкой ножей 11, нижняя часть ножей 11 снабжена ограничителем поперечных перемещений (не показан), расположенным в плоскости Z.Для передачи вращения дискам 20 и колебательных движений ножам 11 диски 20 каждого рабочего органа рам 8 и 9 расположены на одном валу 28, который связан с валом-осью 7 через угловой редуктор В1. Валы-оси 7 рам 8 и 9 в верхней части соединены горизонтальным валом 29 через верхние редукторы В. Вал 29 соединен с двигателем орудия.Почвообрабатывающее орудие работает следующим образом.При прямолинейном движении вертикальные рамы 8 и 9 находятся в среднем положении и вертикальные ножи 11 испытывают минимальное сопротивление при разрезании почвы. В начале движения горизонтальные части 10 рабочих органов погружаются до соприкосновения с землей ведущего колеса 1 и комкодавителя 19 и обеспечивают равномерное прижатие колес или гусениц тележки к земле без проскальзывания и постоянную глубину вспашки. Горизонтальные части рабочих органов 10 движутся на разной глубине: передний на глубине 0-I, задний на глубине 0-II (фиг.2), что обеспечивает постоянное усилие прижатия рабочего органа к земле без применения балластных грузов.При маневрировании оператор рычагами 3 поворачивает заднюю раму 9 в сторону, противоположную заданному повороту орудия, на угол - Z.В другом варианте вертикальные ножи 11 каждого рабочего органа могут быть свободно установлены на одной оси 25, связанной с двигателем орудия, на оси 25 жестко установлены эксцентрики 26, а на вертикальных рамах 8 и 9 - упоры 27 с возможностью взаимодействия с задней кромкой ножей 11, нижняя часть ножей 11 снабжена ограничителем поперечных перемещений (не показан), расположенным в плоскости Z.Для передачи вращения дискам 20 и колебательных движений ножам 11 диски 20 каждого рабочего органа рам 8 и 9 расположены на одном валу 28, который связан с валом-осью 7 через угловой редуктор В1. Валы-оси 7 рам 8 и 9 в верхней части соединены горизонтальным валом 29 через верхние редукторы В. Вал 29 соединен с двигателем орудия.Почвообрабатывающее орудие работает следующим образом.При прямолинейном движении вертикальные рамы 8 и 9 находятся в среднем положении и вертикальные ножи 11 испытывают минимальное сопротивление при разрезании почвы. В начале движения горизонтальные части 10 рабочих органов погружаются до соприкосновения с землей ведущего колеса 1 и комкодавителя 19 и обеспечивают равномерное прижатие колес или гусениц тележки к земле без проскальзывания и постоянную глубину вспашки. Горизонтальные части рабочих органов 10 движутся на разной глубине: передний на глубине 0-I, задний на глубине 0-II (фиг.2), что обеспечивает постоянное усилие прижатия рабочего органа к земле без применения балластных грузов.При маневрировании оператор рычагами 3 поворачивает заднюю раму 9 в сторону, противоположную заданному повороту орудия, на угол -  (фиг.1 и фиг.8), одновременно поворачивается передняя рама 8 в заданном направлении поворота на угол . При этом вертикальные ножи 11 задней рамы 9 заносят заднюю часть орудия вокруг точки С в сторону, противоположную заданному направлению поворота относительно оси симметрии (фиг.8), и ножи 11 передней рамы 8 заносят вокруг точки С переднюю часть орудия в заданном направлении поворота, в результате чего происходит смещение оси поворота из точки 0 при работе с одним рабочим органом в точку 01 и уменьшение радиуса поворота. При одном рабочем органе при повороте его на угол радиус поворота орудия составит расстояние ОА и ОВ, в предлагаемом орудии при повороте двух рабочих органов на тот же угол радиус поворота орудия ~ составит расстояние О1А передней рамы 8 и O1В1 задней рамы 9. То есть для обеспечения заданного радиуса поворота при маневрировании оператору потребуется повернуть рамы 8 и 9 с вертикальными ножами 11 на угол, ~ в 2 раза меньший, чем при одном рабочем органе, что уменьшает реакцию почвы на рабочие органы, снижает усилия оператора, снижает нагрузку на двигатель при больших углах поворота и повышает надежность его работы.Таким образом, вертикальные ножи 11 рабочих органов служат для управления направлением движения при маневрировании, а также для подрезания пласта и фиксации горизонтальных ножей 10 на постоянной глубине.Почвообрабатывающее орудие обеспечивает 4 варианта управления рычагами 3 по всем вариантам соединения тяг 12 с рамами 8 и 9.1 вариант - (фиг.1) - рычаги 3 поворачивают одновременно вокруг оси 7 в точке В по вариантам соединения тяг 12, варианту а и b, варианту c и d (фиг.6), варианту а и b (фиг.7).2 вариант - (фиг.3) - левый рычаг 3 жестко зафиксирован по отношению к корпусу орудия, а правый рычаг 3 перемещают в секторе 4 в горизонтальной плоскости вокруг оси 7 в точке В по вариантам соединения тяг а и b (фиг.5) и с и d (фиг.6), вариант а и b (фиг.7).3 вариант - (фиг.4) - рычаги 3 перемещают в секторе 4 в вертикальной плоскости в противофазе, т.е. при повороте влево левый рычаг 3 в точке 14 опускают вниз, при этом правый рычаг 3 в точке 15 поднимается вверх на то же расстояние. Тяги 12 по варианту соединения c и d (фиг.7).4 вариант - (фиг.4) - тяги 12 по вариантам соединения c и d (фиг.7) разъединяют в точках 14 и 15, левую тягу передней рамы 8 через перекидные ролики 18 соединяют в точке 15 с правой тягой 12 передней рамы 8, а правую тягу задней рамы 9 через перекидной ролик 18 соединяют в точке 14 с левой тягой задней рамы 9. Манипулируя рычагами 3 можно получать любое пространственное положение точки А передней рамы 8 и точки В задней рамы 9 независимо друг от друга.Предлагаемое орудие обеспечивает следующие варианты маневрирования по кинематической связи передней и задней рам 8 и 9.1. Вариант а (фиг.5) по варианту с (фиг.6 по варианту а - фиг.5), вариант d (фиг.6 по варианту а - фиг.5), вариант а и с (фиг.7) используют для обеспечения высокой маневренности орудия с резкими поворотами при обработке как междурядья, так и между растениями в одном ряду.2. Вариант b (фиг.5) и вариант с (фиг.6 по варианту b - фиг.5), вариант d (фиг.6 и по варианту b - фиг.5), вариант b и d (фиг.7) используют при междурядной обработке растений, т.е. когда не требуются резкие повороты орудия, орудие совершает движение боком (движение “краб”) без углового разворота корпуса орудия для подхода вплотную к растениям без травмирования растений.3. Вариант е (фиг.7) обеспечивает полную свободу маневра орудием, ограниченное только равной скоростью переднего и заднего рабочих органов по отношению к земле, которая равна скорости перемещения корпуса орудия и обеспечивает возможность маневрирования по всем вариантам c и d (фиг.7) без изменения кинематической схемы соединения тяг 12 с рамами 8 и 9. При этом рычаги управления регулируются самостоятельно и по-разному, в отличие от вариантов c и d (фиг.7), когда рычаги 3 движутся одинаково и одновременно навстречу друг другу или в разные стороны.Постоянно стремящиеся заглубиться горизонтальные ножи 10 прижимают плоскость ведущего колеса (или гусеницы) 1 параллельно к плоскости земли, что дает возможность оператору управлять орудием дистанционно.При наладке почвообрабатывающего орудия по варианту маневрирования по кинематической связи передней и задней рам 8 и 9 по варианту 1 (фиг.5) к уже существующей системе соединения тяг 12 с вертикальными рамами 8 и 9, например вариант 7 (фиг.7) или вариант 9 (фиг.7), добавляют вторую систему соединения тяг 12 с вертикальными рамами 8 и 9, например по варианту 3 (фиг.6). Ось-вал промежуточных звеньев 13 (фиг.6) совершает нужный угловой поворот от двигателя орудия с помощью одного редуктора (не показан), причем направление и величину поворота оси-вала задает оператор с помощью исполнительного механизма дистанционного управления.При наладке почвообрабатывающего орудия по варианту маневрирования по кинематической связи передней и задней рам 8 и 9 по №3 (фиг.7) в тросовую систему передней и задней рам 8 и 9 встраивают по одному независимому исполнительному механизму дистанционного управления (не показан) с механизмом дистанционного отключения системы, что позволяет в случае необходимости воспользоваться установленной системой управления для оператора без переналадки системы управления орудием.При движении орудия горизонтальные ножи 10 заглубляют диски-очистители 20 в землю, которая, оказывая давление на плоскую поверхность n зубьев 22, поворачивает диски 20 вокруг осей 21, при этом режущая кромка m зубьев 22 режет попадающуюся сорную растительность, что исключает забивание ножей 11 и остановку орудия для очистки.Вертикальные ножи 11 при взаимодействии с эксцентриками 24 получают колебания по задней кромке ножей при качании вокруг оси 23 в плоскости х (фиг.10); по ходу движения орудия.По другому варианту ножи 11, опираясь на упор 27, получают сложное движение в плоскости х-у (фиг.10) по окружности, совершая движение “вниз-вперед-вверх-назад-вниз”, что обеспечивает значительное снижение тягового сопротивления рабочих органов и облегчает условия среза сорной растительности.Сообщение колебательных движений ножам 11 и вращения дискам-очистителям от двигателя происходит через горизонтальный нижний вал 28, на концах которого расположены эксцентрики или кулачки 24 и диски-очистители 20. Горизонтальный вал 28 получает вращение от вертикального вала-оси 7 через угловой редуктор В1 (фиг.11 и 12). В варианте исполнения (фиг.11 и 12) представлен верхний горизонтальный вал 29 привода вращения валов-осей 7. Передний и задний валы-оси 7 получают вращательное движение через верхний горизонтальный вал 29 и верхние редукторы В (фиг.11 и 12). Вариант технического исполнения редуктора В и В1 - на фиг.13. Верхний горизонтальный вал 29 получает вращение от двигателя орудия.Таким образом, в сравнении с прототипом предлагаемое почвообрабатывающее орудие обеспечивает следующие преимущества:- значительное снижение усилий оператора и трудоемкости при управлении орудием;- обеспечивает полную свободу маневра в зависимости от требуемых условий обработки;- снижение нагрузки на двигатель при маневрировании и повышение его надежности за счет снижения давления почвы на рабочие органы и снижения угла их поворота;- отсутствие проскальзывания движителя по отношению к земле без применения балластных грузов;- использование ножей с колебательным движением значительно (на 30-35%) снижает тяговое сопротивление рабочих органов;- орудие может использоваться как для поверхностной обработки почвы, так и для посева, внесения удобрений, подрезки дерна и т. д.- при дистанционном управлении орудие движется без сопровождения оператора, который находится вне обрабатываемой территории, что исключает утаптывание взрыхленной земли оператором. (фиг.1 и фиг.8), одновременно поворачивается передняя рама 8 в заданном направлении поворота на угол . При этом вертикальные ножи 11 задней рамы 9 заносят заднюю часть орудия вокруг точки С в сторону, противоположную заданному направлению поворота относительно оси симметрии (фиг.8), и ножи 11 передней рамы 8 заносят вокруг точки С переднюю часть орудия в заданном направлении поворота, в результате чего происходит смещение оси поворота из точки 0 при работе с одним рабочим органом в точку 01 и уменьшение радиуса поворота. При одном рабочем органе при повороте его на угол радиус поворота орудия составит расстояние ОА и ОВ, в предлагаемом орудии при повороте двух рабочих органов на тот же угол радиус поворота орудия ~ составит расстояние О1А передней рамы 8 и O1В1 задней рамы 9. То есть для обеспечения заданного радиуса поворота при маневрировании оператору потребуется повернуть рамы 8 и 9 с вертикальными ножами 11 на угол, ~ в 2 раза меньший, чем при одном рабочем органе, что уменьшает реакцию почвы на рабочие органы, снижает усилия оператора, снижает нагрузку на двигатель при больших углах поворота и повышает надежность его работы.Таким образом, вертикальные ножи 11 рабочих органов служат для управления направлением движения при маневрировании, а также для подрезания пласта и фиксации горизонтальных ножей 10 на постоянной глубине.Почвообрабатывающее орудие обеспечивает 4 варианта управления рычагами 3 по всем вариантам соединения тяг 12 с рамами 8 и 9.1 вариант - (фиг.1) - рычаги 3 поворачивают одновременно вокруг оси 7 в точке В по вариантам соединения тяг 12, варианту а и b, варианту c и d (фиг.6), варианту а и b (фиг.7).2 вариант - (фиг.3) - левый рычаг 3 жестко зафиксирован по отношению к корпусу орудия, а правый рычаг 3 перемещают в секторе 4 в горизонтальной плоскости вокруг оси 7 в точке В по вариантам соединения тяг а и b (фиг.5) и с и d (фиг.6), вариант а и b (фиг.7).3 вариант - (фиг.4) - рычаги 3 перемещают в секторе 4 в вертикальной плоскости в противофазе, т.е. при повороте влево левый рычаг 3 в точке 14 опускают вниз, при этом правый рычаг 3 в точке 15 поднимается вверх на то же расстояние. Тяги 12 по варианту соединения c и d (фиг.7).4 вариант - (фиг.4) - тяги 12 по вариантам соединения c и d (фиг.7) разъединяют в точках 14 и 15, левую тягу передней рамы 8 через перекидные ролики 18 соединяют в точке 15 с правой тягой 12 передней рамы 8, а правую тягу задней рамы 9 через перекидной ролик 18 соединяют в точке 14 с левой тягой задней рамы 9. Манипулируя рычагами 3 можно получать любое пространственное положение точки А передней рамы 8 и точки В задней рамы 9 независимо друг от друга.Предлагаемое орудие обеспечивает следующие варианты маневрирования по кинематической связи передней и задней рам 8 и 9.1. Вариант а (фиг.5) по варианту с (фиг.6 по варианту а - фиг.5), вариант d (фиг.6 по варианту а - фиг.5), вариант а и с (фиг.7) используют для обеспечения высокой маневренности орудия с резкими поворотами при обработке как междурядья, так и между растениями в одном ряду.2. Вариант b (фиг.5) и вариант с (фиг.6 по варианту b - фиг.5), вариант d (фиг.6 и по варианту b - фиг.5), вариант b и d (фиг.7) используют при междурядной обработке растений, т.е. когда не требуются резкие повороты орудия, орудие совершает движение боком (движение “краб”) без углового разворота корпуса орудия для подхода вплотную к растениям без травмирования растений.3. Вариант е (фиг.7) обеспечивает полную свободу маневра орудием, ограниченное только равной скоростью переднего и заднего рабочих органов по отношению к земле, которая равна скорости перемещения корпуса орудия и обеспечивает возможность маневрирования по всем вариантам c и d (фиг.7) без изменения кинематической схемы соединения тяг 12 с рамами 8 и 9. При этом рычаги управления регулируются самостоятельно и по-разному, в отличие от вариантов c и d (фиг.7), когда рычаги 3 движутся одинаково и одновременно навстречу друг другу или в разные стороны.Постоянно стремящиеся заглубиться горизонтальные ножи 10 прижимают плоскость ведущего колеса (или гусеницы) 1 параллельно к плоскости земли, что дает возможность оператору управлять орудием дистанционно.При наладке почвообрабатывающего орудия по варианту маневрирования по кинематической связи передней и задней рам 8 и 9 по варианту 1 (фиг.5) к уже существующей системе соединения тяг 12 с вертикальными рамами 8 и 9, например вариант 7 (фиг.7) или вариант 9 (фиг.7), добавляют вторую систему соединения тяг 12 с вертикальными рамами 8 и 9, например по варианту 3 (фиг.6). Ось-вал промежуточных звеньев 13 (фиг.6) совершает нужный угловой поворот от двигателя орудия с помощью одного редуктора (не показан), причем направление и величину поворота оси-вала задает оператор с помощью исполнительного механизма дистанционного управления.При наладке почвообрабатывающего орудия по варианту маневрирования по кинематической связи передней и задней рам 8 и 9 по №3 (фиг.7) в тросовую систему передней и задней рам 8 и 9 встраивают по одному независимому исполнительному механизму дистанционного управления (не показан) с механизмом дистанционного отключения системы, что позволяет в случае необходимости воспользоваться установленной системой управления для оператора без переналадки системы управления орудием.При движении орудия горизонтальные ножи 10 заглубляют диски-очистители 20 в землю, которая, оказывая давление на плоскую поверхность n зубьев 22, поворачивает диски 20 вокруг осей 21, при этом режущая кромка m зубьев 22 режет попадающуюся сорную растительность, что исключает забивание ножей 11 и остановку орудия для очистки.Вертикальные ножи 11 при взаимодействии с эксцентриками 24 получают колебания по задней кромке ножей при качании вокруг оси 23 в плоскости х (фиг.10); по ходу движения орудия.По другому варианту ножи 11, опираясь на упор 27, получают сложное движение в плоскости х-у (фиг.10) по окружности, совершая движение “вниз-вперед-вверх-назад-вниз”, что обеспечивает значительное снижение тягового сопротивления рабочих органов и облегчает условия среза сорной растительности.Сообщение колебательных движений ножам 11 и вращения дискам-очистителям от двигателя происходит через горизонтальный нижний вал 28, на концах которого расположены эксцентрики или кулачки 24 и диски-очистители 20. Горизонтальный вал 28 получает вращение от вертикального вала-оси 7 через угловой редуктор В1 (фиг.11 и 12). В варианте исполнения (фиг.11 и 12) представлен верхний горизонтальный вал 29 привода вращения валов-осей 7. Передний и задний валы-оси 7 получают вращательное движение через верхний горизонтальный вал 29 и верхние редукторы В (фиг.11 и 12). Вариант технического исполнения редуктора В и В1 - на фиг.13. Верхний горизонтальный вал 29 получает вращение от двигателя орудия.Таким образом, в сравнении с прототипом предлагаемое почвообрабатывающее орудие обеспечивает следующие преимущества:- значительное снижение усилий оператора и трудоемкости при управлении орудием;- обеспечивает полную свободу маневра в зависимости от требуемых условий обработки;- снижение нагрузки на двигатель при маневрировании и повышение его надежности за счет снижения давления почвы на рабочие органы и снижения угла их поворота;- отсутствие проскальзывания движителя по отношению к земле без применения балластных грузов;- использование ножей с колебательным движением значительно (на 30-35%) снижает тяговое сопротивление рабочих органов;- орудие может использоваться как для поверхностной обработки почвы, так и для посева, внесения удобрений, подрезки дерна и т. д.- при дистанционном управлении орудие движется без сопровождения оператора, который находится вне обрабатываемой территории, что исключает утаптывание взрыхленной земли оператором.
Формула изобретения1. Ручное почвообрабатывающее орудие, включающее тележку, на раме которой установлен двигатель, рабочий орган и рычаги управления, отличающееся тем, что на раме впереди и сзади тележки по оси симметрии расположены вертикальные оси, на которых смонтированы вертикальные рамы с возможностью поворота в горизонтальной плоскости, рабочие органы состоят из горизонтальной подрезающей рабочей части и боковых вертикально разрезающих почву ножей, закрепленных на вертикальных рамах, соединенных с рычагами управления и между собой с помощью жестких или гибких тяг.2. Ручное почвообрабатывающее орудие по пп.1 и 2, отличающееся тем, что рама тележки выполнена призматической формы и образована из горизонтальных элементов, жестко соединенных вертикальными стойками.3. Ручное почвообрабатывающее орудие по пп.1 и 2, отличающееся тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены жесткими или гибкими, расположены перекрестно и шарнирно закреплены на внутренних поверхностях диагонально расположенных вертикальных стоек рам, одна из которых соединена с рычагами управления с возможностью поворота рам в разные стороны.4. Ручное почвообрабатывающее орудие по пп.1 и 2, отличающееся тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены жесткими или гибкими, расположены параллельно и шарнирно закреплены на внутренних поверхностях противолежащих вертикальных стоек рам, одна из которых соединена с рычагами управления с возможностью поворота рам в одну сторону.5. Ручное почвообрабатывающее орудие по пп.1 и 2, отличающееся тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены жесткими или гибкими, одними концами шарнирно закреплены на внутренних поверхностях вертикальных стоек рам, а свободные концы тяг противолежащих стоек шарнирно закреплены на промежуточных звеньях, смонтированных на общем валу, установленном на раме тележки с возможностью вращения и соединенном с рычагами управления с возможностью поворота рам в разные стороны.6. Ручное почвообрабатывающее орудие по пп.1 и 2, отличающееся тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены жесткими или гибкими, одними концами шарнирно закреплены на внутренних поверхностях вертикальных стоек рам, а свободные концы тяг противолежащих стоек шарнирно закреплены на промежуточных звеньях, смонтированных на общем валу, установленном на раме тележки с возможностью вращения и соединенных с рычагами управления с возможностью поворота рам в одну сторону.7. Ручное почвообрабатывающее орудие по пп.1 и 2, отличающееся тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены жесткими или гибкими, одними концами шарнирно закреплены на внутренних поверхностях вертикальных стоек рам, а свободные конпы тяг противолежащих стоек шарнирно закреплены на промежуточных звеньях, смонтированных на осях, каждое звено на своей оси, установленных на раме тележки с возможностью вращения и соединенных с рычагами управления с возможностью поворота рам в разные стороны.8. Ручное почвообрабатывающее орудие по пп.1 и 2, отличающееся тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены жесткими или гибкими, одними концами шарнирно закреплены на внутренних поверхностях вертикальных стоек рам, а свободные концы тяг противолежащих стоек шарнирно закреплены на промежуточных звеньях, смонтированных на осях, каждое звено на своей оси, установленных на раме тележки с возможностью вращения и соединенных с рычагами управления с возможностью поворота рам в одну сторону.9. Ручное почвообрабатывающее орудие по пп.1 и 2, отличающееся тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены из гибких тросов в оболочке, расположены параллельно и закреплены одними концами на внутренних поверхностях вертикальных стоек одной рамы, а другими концами на наружной поверхности противолежащих вертикальных стоек другой рамы, причем одна из рам соединена с рычагами управления с возможностью их поворота в разные стороны.10. Ручное почвообрабатывающее орудие по пп.1 и 2, отличающееся тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены из гибких тросов в оболочке, расположены перекрестно и закреплены одними концами на внутренних поверхностях вертикальных стоек одной рамы, а другими концами на наружной поверхности диагонально расположенных вертикальных стоек другой рамы, причем одна из рам соединена с рычагами управления с возможностью их поворота в одну сторону.11. Ручное почвообрабатывающее орудие по пп.1 и 2, отличающееся тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены из гибких тросов в оболочке, присоединены к вертикальным стойкам одной рамы с внутренней, а другой с наружной стороны, причем свободные концы тяг противолежащих вертикальных стоек обеих рам закреплены на одном из разных рычагов управления с возможностью поворота рам в разные стороны.12. Ручное почвообрабатывающее орудие по пп.1 и 2, отличающееся тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены из гибких тросов в оболочке, присоединены к вертикальным стойкам одной рамы с внутренней, а другой с наружной стороны, причем свободные концы тяг диагонально расположенных вертикальных стоек обеих рам закреплены на одном из разных рычагов управления с возможностью поворота рам в одну сторону.13. Ручное почвообрабатывающее орудие по пп.1 и 2, отличающееся чем, что тяги передней и задней вертикальных рам выполнены из гибких тросов в оболочке, присоединены к вертикальным стойкам одной рамы с внутренней, а другой с наружной стороны, причем тяги каждой рамы своими свободными концами жестко закреплены на одном из разных рычагов управления с возможностью раздельного регулирования поворотом рам.14. Ручное почвообрабатывающее орудие по п.1, отличающееся тем, что рабочие органы орудия снабжены очистительными устройствами, которые выполнены в виде дисков с режущими зубцами, имеющими одну плоскую поверхность, диски расположены снаружи вертикальных ножей и смонтированы с возможностью вращения на горизонтальных осях, установленных на вертикальных рамах.15. Ручное почвообрабатывающее орудие по пп.1 и 14, отличающееся тем, что диски-очистители каждого рабочего органа смонтированы на одной горизонтальной оси, связанной с двигателем орудия с возможностью вращения.16. Ручное почвообрабатывающее орудие по пп.1, 14 и 15, отличающееся тем, что вертикальные ножи рабочих органов закреплены на вертикальных рамах с помощью осей, расположенных выше горизонтальных осей дисков-очистителей, на которых жестко установлены эксцентрики или кулачки с возможностью взаимодействия с задней кромкой вертикальных ножей и сообщения им колебательных движений, а нижняя часть ножей снабжена ограничителем поперечных перемещений.17. Ручное почвообрабатывающее орудие по пп.1, 14 и 15, отличающееся тем, что вертикальные ножи рабочих органов своей верхней частью закреплены на вертикальных рамах с помощью одной оси, связанной с двигателем орудия, на оси жестко установлены эксцентрики с возможностью взаимодействия с вертикальными ножами и сообщения им колебательных движений; на вертикальных рамах установлены упоры с возможностью взаимодействия с задней кромкой вертикальных ножей, а нижняя часть ножей снабжена ограничителем поперечных перемещений.MM4A Досрочное прекращение действия патента Российской Федерации на изобретение из-за неуплаты в установленный срок пошлины за поддержание патента в силе Дата прекращения действия патента: 20.08.2005 Извещение опубликовано: 20.10.2006 БИ: 29/2006 Популярные патенты: 2038763 Регулятор вакуума ... патрубка выполнено удлиненным до кромки основания выходного патрубка." что позволяет направить силу потока, движущегося по воздушному патрубку воздуха непосредственно на "отрыв" заслонки от входного патрубка, уменьшая тем самым сопротивление перемещения заслонки, повышение стабильности регулируемого вакуума; 2) ". клиновидный упор, острый угол которого направлен в противоположную основаниям патрубков сторону и равен углам зацепов, прикрепленных к заслонке с двух сторон трехугольного выреза." что предотвращает поднятие заслонки выше предельно допустимого значения и тем самым исключает непосредственное (прямое) перетекание рабочей среды из воздушного патрубка в выходной ... 2400042 Высевающий аппарат ... по направлению ее вращения. Изобретение имеет повышенную надежность работы и обеспечивает равномерность высева семян. 3 ил. Изобретение относится к сельскохозяйственному машиностроению, а именно к аппаратам для высева семян и других сыпучих материалов, и может быть использовано для дозирования сыпучих материалов в различных отраслях промышленности.Известен высевающий аппарат, содержащий корпус с загрузочным и выгрузным окнами и расположенной внутри катушкой с желобками. При этом между корпусом и катушкой установлена с возможностью поворота и фиксации цилиндрическая втулка, снабженная рядом различных по длине приемных окон и одним выгрузным окном (Патент РФ 1613021, МПК A01C ... 2267261 Молочно-доильный комплекс ... доильные площадки в виде цепочно-планчатых транспортерных лент, перемещающихся в разные стороны и расположенных по обеим сторонам приямка для дояров. С одной стороны каждой ленты расположен бесконечный транспортер с кормушками, а с другой такой же транспортер с шарнирно прикрепленными к нему Г-образными фиксаторами с целью расположения коров на транспортерных лентах "елочкой". Использование такого устройства обеспечивает максимальное использование полезной площади, однако оно энерго- и материалоемко, дорого и сложно в эксплуатации, т.к. имеет много движущихся элементов.Наиболее близким по технической сущности и достигаемому результату является молочно-доильный ... 2267897 Высевающий аппарат ... заполнение ячеек, неравномерность выноса семян из семенного ящика. Сущность заявленного изобретения заключается в следующем. Задача, на решение которой направлено заявленное изобретение, - обеспечение точности высева без механических повреждений семян с одновременной их подачей в сошник для образования компактного (группового) гнезда.Технический результат - повышение продуктивности и технологической надежности посевов пропашных культур.Указанный технический результат достигается тем, что в известном высевающем аппарате, включающем семенной ящик, на дне которого смонтирован транспортер, имеющий ячейки, активные направляющие и отражатель, согласно изобретению, размещенная ... 2078495 Устройство для транспортирования кормов в хранилищах башенного типа ... устройства [3] Техническая задача изобретения сделать эти транспортеры для перемещения кормов более долговечными, более производительными и менее ремонтоемкими. Достигается решение этой технической задачи путем комбинации двух гибких тел: роликовой цепи со спецзвеном и клинового ремня для изготовления транспортного полотна. Известно, что клиновой ремень получил широкое применение для передачи вращательного движения между валами, при этом с высокими скоростями и больших мощностей. Это очень надежное гибкое тело для передачи вращательного движения при значительных расстояниях между валами, достигающими двух десятков метров. Широко используется для передачи вращательного движения и ... |
Еще из этого раздела: 2421109 Способ роспуска закристаллизовавшегося меда и устройство для его осуществления 2407280 Устройство и способ для осушения воздуха в теплице и теплица 2407282 Способ выращивания корнесобственных саженцев винограда и машина для его осуществления 2437262 Культиватор-плоскорез 2067798 Агромостовой комплекс 2440712 Автоматизированная система для хранения в поле, возможности оперативного контроля и выгрузки убранных продуктов урожая из уборочной машины 2282965 Разбрасыватель минеральных удобрений 2488422 Сеть фильтров 2462866 Рыболовная катушка 2295848 Способ дезинсекции и дезинфекции материалов зернового происхождения и устройство для его осуществления |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||