Способ управления сельскохозяйственным агрегатом и система для его осуществленияПатент на изобретение №: 2023360 Автор: Гаджимурадов Исин Мевлютович Патентообладатель: Гаджимурадов Исин Мевлютович Дата публикации: 30 Ноября, 1994 Изображения 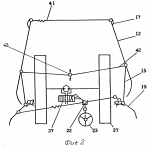 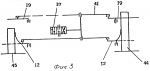 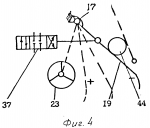 Использование: в сельскохозяйственном машиностроении, в частности в способах и системах управления агрегатом для обеспечения вождения на винограднике и разворота агрегата в конце ряда виноградника. Сущность изобретения: способ предусматривает установку столбов в конце каждого ряда виноградника в качестве центра разворота. В качестве базовой линии используют расстояние от агрегата до столбов с правой и левой сторон поочередно. Сначала контролируют и устраняют отклонения агрегата от курса, затем от базовой линии в конце ряда от конечного столба. Система управления агрегатом содержит приводы колес и орудий и датчики курса, соединенные с копиром центра поворота - конечного столба в конце каждого ряда виноградника. 2 с. и 2 з.п. ф-лы, 5 ил. Изобретение относится к сельскохозяйственному машиностороению, к способу и системе управления сельскохозяйственным агрегатом при обработке виноградников и междурядий других культур. Известны способ и устройство для вождения сельскохозяйственных агрегатов и обработки междурядий виноградников и других культур (авт. св. N 1142018, кл. А 01 В 69/04). Способ предусматривает копирование линии полива и разворот в конце. Устройство содержит датчик отклонения машины от направляющей канавки, усилительно исполнительные элементы и технологическое оборудование. Копирование рядков винограда без поливных каналов затруднено. Известны способ и устройство для автоматического вождения сельскохозяйственной машины (авт. св. N 829000, кл. А 01 В 69/04). Датчик кинематически связан через усилитель с механизмом управления движителями. Поворот в конце гона обеспечивается центром на конце стрелы. Датчик и стрела содержит звено в виде параллелограммного механизма. Известен способ и устройство для обработки виноградной лозы и сельскохозяйственный агрегат (авт. св. N 1547726, кл. А 01 В 39/28), включающий копирование линии различия свойств почвы до и после обработки почвы и постоянной технологической колеи. Рабочие органы культиватора установлены с просветом, соединены шарнирно с рамой и посредством рулевого механизма с усилителем механизма поворота. Прототипом изобретения является способ и устройство для автоматического вождения сельскохозяйственной машины, включающие систему поворота направляющих колес по сигналу датчика отклонения от направляющей канавки и разворота машины в конце направляющей канавки. Катки датчика отклонения установлены последовательно по ходу движения в тележке, вертикальная ось которой расположена на уровне оси движителей и снабжена фиксатором. Недостатком прототипа являются то, что необходима исправная сеть каналов полива, что затрудняет обработку багарного виноградника. Сигнал об изменении курса не компенсирует релейность, запаздывание и инертность исполнительных элементов. Все это требует повышения точности вождения, увеличивает затраты на строительство и ремонт каналов для полива при обработке виноградников. Целью изобретения является обеспечение водждения и разворота агрегата в конце ряда винограда. Поставленная цель достигается тем, что столб в конце каждого ряда использован в качестве центра разворота, контрольным параметром является расстояние от центра агрегата до столбов в конце гона с правой и левой сторон поочередно, в начале контролируют и устраняют ошибки отклонения от курса, затем от базовой линии рядка, в конце гона от конечного столба, в каждом случае энергию между колесами распределяют по курсу и реакциям почвы, часть выходного сигнала управления обратным знаком на вход управления подают направляющими колесами, при этом движение колес обеспечивают по следу рабочих органов встречного рабочего хода. Система управления агрегатом при обработке виноградников содержит приводы колес и орудий встречного движения и датчики курса, соединенные с копиром центра поворота - конечного столба в ряде виноградника. На фиг. 1 изображена схема системы для осуществления способа управления агрегатом с рабочими органами возвратно-поступательного продольного движения относительно трактора; на фиг. 2 - схема установки датчиков упреждающей информации об изменении курса и фиксированного поворота в конце гона; на фиг. 3 - схема установки датчиков в поперечно-вертикальной плоскости; на фиг. 4 - схема получения информации для фиксированного поворота вокруг конечного столба ряда виноградника; на фиг. 5 - схема формирования траектории движения по междурядиям виноградника. Способ осуществляется системой, включающей ряд столбов 1, связанных шпалерной проволокой и виноградной лозой, копиры 2 направляющих колес 3, вертикальные оси 4 которых смещены вперед от центров площадей контакта с почвой и соединены тягами 5 и мостом 6, относительно которого цепью или иным приводом 7 перемещается орудие с листерным корпусом 9 и правооборачивающим корпусом 10, правое колесо 11 с копиром 12 ряда столбов 13 и проволоки 14 с лозой, тягу 15 связи, дно 16 борозды для качения колес, пружины 17 около шарнира 18 копира 19, связанного тягой 20 с дифференциальным рычагом (коромыслом) 21 с рулевой сошкой 22 и колесом 23. Входом планетарного бортового редуктора является солнечная шестерня 24, выходом - водило 25 с сателлитами 26 привода колеса 27. Коронная шестерня 28 через шестерню 29 и вал 30 составляет второй вход и дополняет механический поток первого входа через вал 31 трансмиссии гидравлическим от шестерни 32 гидромотора, вторая шестерня 33 которой валом 34 управляет редуктором 35 второго колеса 36. Гидрораспределителем 37 можно управлять и тягой 38 связи с копиром 39 и пружиной 40 второго борта. Тяга 41 (фиг. 2) с упругой пружиной и тяга 42 связаны с рычагом 43 коробки передач для отвода копиров при движении назад. Копиры 19 взаимодействия с высокими столбами 44 (фиг. 3) в конце гона установлены выше, чем копиры 12 ряда низких столбов 45, с возможностью получения сигнала об ошибке от столба 44 (фиг. 4), использования для управления агрегатом при формировании траектории движения между рядами (фиг. 5) копирами 12 и фиксированного разворота в конце гона копирами 19. Рядки составляют базовую линию, в границах между которыми допускается движение агрегата. Копиры 2, 12, 19 и 39 дают сигналы исполнительным элементам 22-37 регулировать разность скоростей бортов. При реверсе их можно выключить тягами 42 и рычагом 43. Концы копиров 12 изогнуты вниз или вверх от земли с возможностью обеспечения постоянного контакта с шпалерной проволокой в ряде без лозы. Копиры 19 (фиг. 3) установлены выше столбов ряда и нижнего одного конечного столба и могут сигналам приближения + (фиг. 4) и удаления (-) поддержать радиус поворота и формировать всеми копирами вместе траекторию, изображенную на фиг. 5. Копиры установлены около рядков, соединены тягой 38 с гидрораспределителем 37 усилителя и могут давать ритмические импульсы постоянной частоты, а пружины 17 и 40 возвращают золотник в положение отрицательного сигнала при удалении от целевой траектории и центра поворота. В усилителе импульсы, идущие справа и слева, могут сравниваться, при этом отсутствие разницы может восприниматься как свидетельство нормального положения агрегата относительно рядков. При отклонении от оси рядков 1 и 13 изменение положения агрегата может привести к тому, что сигналы, поступающие с одной стороны, увеличиваются, а с другой уменьшаются, причем их разность пропорциональна углу отклонения. Усилитель может воспринимать эту разность как свидетельство отклонения от положения равновесия и дать сигнал исполнительным элементам устранить его. Датчики курса соединены с рычагом коробки передач с возможностью отвода копиров от рядков при движении назад. Система работает следующим образом. При движении между рядами 1 и 13 копиры 2 и 12 и колеса 3 и 11 реагируют на отклонение от курса и проволоки 14: при уходе агрегата вправо увеличивается сигнал от правых копиров и колес, снижается от левых. Разность сигналов передается тягами 5 и 15 или одной из них исполнительным элементам механизма поворота до устранения ошибки ухода вправо. При уходе влево датчики дают сигнал исполнительным элементам повернуть вправо и устранить ошибку. Это обеспечивает копирование рядков и дна 16 борозды. Пружины противодействуют повороту копиров, формируют сигнал об уходе от целевого состояния и дают сигнал для поворота до достижения заданного по настройке положения. Аналогично работают установленные на осях копиры 19 и передают сигналы тягой 20 коромыслу 21. Возможен поворот сошки 22 и колеса 23. В каждом случае относительно скорости солнечной шестерни 24 скорость водила 25, сателлитов 26 и колес 27 корректируется коронной шестерней 28, шестерней 29 и валом 30. Суммирование скоростей валов 30 и 31 с учетом знака (направления), механического потока с гидравлическим от гидромашины обеспечивает регулирование потоков энергии к колесам 27 и 36 по курсу и реакциям почвы. Система реализует способ управления так, что в начале контролирует и устраняет ошибки об отклонении от курса, затем - ошибки об отклонении от базовой линии (рядка) и центра поворота. Механический и гидравлические приводы колес вместе увеличивают скорость и энергию привода колеса с учетом формы траектории и текущего значения коэффициента сцепления колеса с почвой. Возможное изменение плотности почвы, радиуса качения и разности скоростей бортов система воспринимает как ошибку и дает сигнал гидромашине скорректировать ведущий момент и скорость. При хорошем сцеплении с почвой забегающего колеса скорость и ведущий момент однозначно увеличиваются, скорость отстающего колеса снижается, в каждом случае ведущие моменты распределяются пропорционально реакциям почвы. Столб в конце каждого ряда является центром поворота (разворота) по сигналам верхнего копира. Контакт копира с этим столбом дает сигнал начать поворот, сигналы в сторону (+) и (-) обеспечивают коррекцию траектории поворота, причем поворот продолжается до начала копирования ряда датчиками курса (копирами 2 и 12 и колесами 3 и 11). Возможно ограничение угла поворота угломером, потерей контакта копира 19 или 39 со столбом и другими известными средствами. В любом случае разворот по круговой траектории происходит поддерживая радиус поворота равным половине захвата агрегата и половине ширины междурядия виноградника. Скорость движения при развороте регулируется известными способами и средствами. Упреждение сигнала об изменении курса достигнуто выносом датчика курса вперед. Высоту столбов 44 и 45 и установки копиров на агрегате подбирают с учетом высоты ряда от земли. Траектория движения агрегата и технологическая колея при выполнении сельскохозяйственных работ остается постоянной. Это снижает площадь уплотнения, приращение плотности, сопротивление движению и энергозатраты (буксование). При использовании предложенного способа и системы управления агрегатом обеспечивается вождение между рядами и разворот агрегата в конце гона без сложных сооружений и дорогостоящих систем, замещающих функции человека. Это открывает путь автоматизации вождения и разворота без участия человека при выполнении опасных для жизни операций опрыскивания и опыливания ядами и другими химикатами. Формирование траектории по технологической колее снижает затраты энергии и экологическую опасность. Формула изобретения1. Способ управления сельскохозяйственным агрегатом, заключающийся в том, что контролируют и устраняют отклонения агрегата от базовой линии, отличающийся тем, что, с целью обеспечения вождения агрегата на винограднике и разворота его в конце ряда винограда, расстояние от агрегата до столбов, установленных в рядах винограда, используют в качестве базовой линии, при этом вначале контролируют и устраняют отклонения агрегата от курса, затем от базовой линии, причем в качестве центра разворота агрегата на смежное междурядье используют последний столб в ряду. 2. Способ по п.1, отличающийся тем, что курс агрегата устанавливают и отслеживают направляющими колесами относительно технологической колеи, образованной рабочими органами агрегата. 3. Система управления сельскохозяйственным агрегатом, содержащая приводы колес и орудий, датчики курса и поворота, отличающаяся тем, что, с целью обеспечения вождения агрегата на винограднике и разворота его в конце ряда винограда, она снабжена копирами столбов-центров разворота, которые установлены в концах рядов винограда для обеспечения поочередного разворота агрегата вправо и влево, при этом копиры связаны с датчиками курса, приводами колес и орудий. 4. Система по п.3, отличающаяся тем, что высота столбов-центров разворота большие высоты столбов, установленных в ряду винограда.MM4A Досрочное прекращение действия патента Российской Федерации на изобретение из-за неуплаты в установленный срок пошлины за поддержание патента в силе Номер и год публикации бюллетеня: 7-2002 Извещение опубликовано: 10.03.2002 Популярные патенты: 2447645 Аппарат для обмолота коробочек семян ... эластичных секционных барабанов и зажимного транспортера. Каждая секция барабанов снабжена билами, причем соседние билы на секции имеют различную высоту, которая изменяется волнообразно, а соседние секции барабана имеют различный угол наклона бил. Барабаны установлены таким образом, чтобы высокие билы одного находились напротив низких бил другого, а зазор между вершинами бил был одинаковым на всей длине барабанов с учетом размеров семян (BY 877 U, 30.06.2003).Аппарат имеет простую конструкцию и регулировку, малую металлоемкость, высокую надежность, способность выполнять технологический процесс более качественно при повышенной засоренности и влажности льна в период уборки, а открытая ... 2454055 Устройство для ротационного внутрипочвенного рыхления с механическим приводом ... с механическим приводом, содержащее ротационный щелерез с диском щелереза, кольцевым щелерезом с промежуточной шестерней внутреннего зацепления, ведущей, центрирующей и ведомой шестернями привода внутрипочвенного рыхлителя, отличающееся тем, что снабжено промежуточной шестерней привода, которая установлена на диске щелереза с зацеплением и внутренней промежуточной шестерней привода кольцевого щелереза и ведомой шестерней привода внутрипочвенного рыхлителя, кольцевой щелерез снабжен наружными режущими органами, расположенными между наружными режущими органами емкостями для приема грунта, при этом зубья и впадины зацепления ведущей, промежуточной внутреннего зацепления, промежуточной и ... 2264065 Способ возделывания сельскохозяйственных культур на корм ... ячмень) зерновых злаковых культур с целью получения кормов для животных (Справочник по кормопроизводству под редакцией И.А.Смурыгина. - М., Агропромиздат, 1985, с.47-49). Но из одновидовых посевов получаемый корм не сбалансирован по протеину, что приводит к его перерасходу при кормлении и удорожанию продукции животноводства. Известны смешанные посевы яровых зерновых (овес, ячмень) с горохом и озимых зерновых (рожь, тритикале, ячмень) с озимой викой (И.И.Елагин. Смешанные посевы увеличивают урожайность, ж. Достижение науки и техники АПК, 1990, №10, с.24-25 - прототип), которые позволяют получать более качественный корм с повышенным содержанием белка и витаминов за счет бобового ... 2464780 Способ, устройство и компьютерный программный продукт для управления группой молочного скота ... для каждого животного в зависимости от рациона по времени и индивидуальную отдачу молока на единицу рациона в единицу времени,c) Доение молочного скота при использовании устройства для доения, d) Определение надоя молока для каждого молочного животного, e) Сравнение каждого индивидуального прогноза с соответствующим измеренным надоем молока,f) Регулирование индивидуальных коэффициентов модели на основе измеренных надоев молока при использовании модели, в частности, системы уравнений,g) Пересчет индивидуальной регулирующей переменной при использовании критерия регулирования,h) Регулирование устройства для кормления на основе пересчитанной регулирующей переменной. Это ... 2165701 Фунгицидная композиция и способ обработки культур для борьбы или профилактики грибковых заболеваний ... средства, отличающийся тем, что надземные части культур обрабатывают эффективной и нефитотоксичной дозой композиции по п.1 или 2. 4. Способ обработки по п.3, отличающийся тем, что доза композиции является такой, при которой наносимая доза бромуконазола составляет 100 - 300 г/га, предпочтительно 150 - 250 г/га, а доза триазола (А) - 50 - 250 г/га, предпочтительно 75 - 200 г/га. 5. Способ обработки по п.3 или 4, отличающийся тем, что соединением (А) является тебуконазол, а доза композиции, содержащей смесь (А) и (В), является такой, при которой доза тебуконазола составляет 75 - 250 г/га, предпочтительно 100 - 150 г/га. 6. Способ обработки по одному из пп.3 - 5, ... |
Еще из этого раздела: 2056755 Способ регулирования роста овощных культур 2056743 Установка для выращивания пушных зверей 2106082 Устройство для укладки подстилочного навоза в бурт 2399200 Устройство для обработки роговых образований животных, например крупного рогатого скота 2397634 Жалюзийное решето 2021671 Машина для уборки льна-долгунца 2245013 Устройство для обмолота легкоповрежденных культур на примере нута (варианты) 2236122 Устройство для содержания животных 2114107 Производные триазола, способ их получения и инсектоакарицидная композиция 2159030 Способ широкорядного посева пропашных культур |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||