Способ определения координат транспортного средстваПатент на изобретение №: 2006794 Автор: Худяков Дмитрий Витальевич, Кадыров Анвар Лутфурахманович, Меньшенин Алексей Владимирович Патентообладатель: Худяков Дмитрий Витальевич, Кадыров Анвар Лутфурахманович, Меньшенин Алексей Владимирович Дата публикации: 30 Января, 1994 Изображения 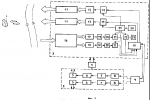 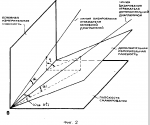 Изобретение относится к навигации в ближней зоне различных роботизированных транспортных средств, в частности к навигационному оборудованию для сопровождения сельскохозяйственных транспортных роботов, робокаров. Технико-экономическим результатом, получаемым от использования изобретения, являются повышение точности измерения координат и вождения транспортного средства и обеспечение возможности трехкоординатных измерений. В способе определения координат транспортного средства с помощью расположенного на транспортном средстве импульсного оптического локатора с вращающейся вокруг оси измерительной плоскостью приемно-передающей диаграммы и управляемыми двухкоординатными подвижками оси вращения измерительной плоскости, заключающемся в том, что в плоскости сканирования, перпендикулярной оси вращения измерительной плоскости, измеряют азимутальные углы между линиями визирования не менее трех разнесенных реперных отражателей, измеряют азимутальный угол между фиксированным нулевым положением вращающейся измерительной плоскости импульсного оптического локатора и линией визирования одного из реперных отражателей, измеряют временные интервалы между моментами совпадения вращающейся измерительной плоскости импульсного оптического локатора с реперными отражателями, измеряют временной интервал между моментом прохождения фиксированного нулевого положения измерительной плоскости импульсного оптического локатора и моментом ее совпадения с одним из реперных отражателей, определяют их измеренным временным интервалом азимутальные углы между линиями визирования реперных отражателей и азимутальный угол между нулевым положением измерительной плоскости импульсного оптического локатора и одним из реперных отражателей и формируют момент импульсного лоцирования очередного реперного отражателя с учетом измеренных в предыдущие моменты временных интервалов, дальности, до очередного реперного отражателя и длительности импульса лоцирования, формируют дополнительную вращающуюся приемно-передающую диаграмму импульсного оптического локатора, измерительная плоскость которой отклонена на некоторый угол от измерительной плоскости основной диаграммы вдоль оси, лежащей в измерительной плоскости основной диаграммы и перпендикулярной оси вращения обеих диаграмм, измеряют временные интервалы между моментами совпадения каждого реперного отражателя с измерительными плоскостями, по измеренным временным интервалам и периоду вращения диаграмм в системе координат неподвижных реперных отражателей, вычисляемому путем суммирования временных интервалов между моментами лоцирования всех реперных отражателей, с учетом геометрии расположения обеих измерительных плоскостей определяют угловое положение каждого реперного отражателя относительно плоскости сканирования, по измеренным азимутальным углам, измеренным угловым положениям реперных отражателей и их заданным трехмерным координатам определяют трехмерные линейные координаты оптического локатора и его угловое положение в пространстве, то есть угловое положение плоскости сканирования и нулевого положения вращающейся измерительной плоскости, по линейным и угловым координатам оптического локатора и измеренному угловому положению плоскости сканирования относительно транспортного средства с учетом положения импульсного оптического локатора на транспортном средстве определяют трехмерные линейные и угловые координаты требуемого элемента транспортного средства, по угловым положениям реперных отражателей осуществляют также управление положением плоскости сканирования импульсного оптического локатора, удерживая реперные отражатели в поле зрения импульсного оптического локатора. 3 ил. Изобретение относится к навигации в ближней зоне различных роботизированных средств, в частности к навигационному оборудованию для автовождения сельскохозяйственных транспортных роботов, робокаров. Известен способ определения координат транспортного средства с помощью установленных на машинно-тракторном агрегате фазовых радиодальномеров, реализованных по схеме ведущий-ведомый, заключающийся в измерении дальности до двух ретрансляторов с известными координатами, определении по измеренным значениям дальности текущего положения машинно-транспортного агрегата, измерении поперечного крена машинно-тракторного агрегата и компенсации по данным этих измерений ошибки определения текущего положения. Недостатками этого способа являются большие ошибки измерения координат машинно-тракторного агрегата, обусловленные искажением фазовой структуры радиополя в точке приема из-за отражения радиоволн от Земли и от конструкции машинно-тракторного агрегата, недостаточная точность автовождения, обусловленная отсутствием непосредственного измерения углового положения машинно-тракторного агрегата и оценкой курса машинно- тракторного агрегата путем счисления его траектории, а также необходимость установки двух наземных пунктов с обслуживаемым радиооборудованием. Известен способ определения координат транспортного средства с помощью расположенного на транспортном средстве импульсного оптического локатора с вращающейся вокруг оси измерительной плоскостью приемно-передающей диаграммы и управляемыми двухкоординатными подвижками оси вращения измерительной плоскости, заключающийся в том, что в плоскости сканирования, перпендикулярной оси вращения измерительной плоскости, измеряют азимутальные углы между линиями визирования не менее трех разнесенных реперных отражателей, измеряют азимутальный угол между фиксированным нулевым положением вращающейся измерительной плоскости импульсного оптического локатора и линией визирования одного из реперных отражателей, измеряют временные интервалы между моментами совпадения вращающейся измерительной плоскости импульсного оптического локатора с реперными отражателями, измеряют временной интервал между моментом прохождения фиксированного нулевого положения измерительной плоскости импульсного оптического локатора и моментом ее совпадения с одним из реперных отражателей, определяют по измеренным временным интервалам азимутальные углы между линиями визирования реперных отражателей и азимутальный угол между нулевым положением измерительной плоскости импульсного оптического локатора и одним из реперных отражателей, формируют момент импульса лоцирования очередного реперного отражателя с учетом измеренных в предыдущие моменты временных интервалов, дальности до очередного реперного отражателя и длительности импульса лоцирования. Недостатками этого способа являются невозможность измерения трех координат положения машинно-тракторного агрегата в пространстве, а также необходимость обеспечения высокой точности стабилизации оси вращения приемно-передающей диаграммы в направлении, перпендикулярном базовой (горизонтальной) плоскости, что при существующих технических возможностях ограничивает точность способа. Технико-экономическим результатом изобретения являются повышение точности измерения координат и вождения транспортного средства и обеспечение возможности трехкоординатных измерений. Данный технико-экономический результат достигается тем, что в способе определения координат транспортного средства с помощью расположенного на транспортном средстве импульсного оптического локатора с вращающейся вокруг оси измерительной плоскостью приемно-передающей диаграммы и управляемыми двухкоординатными подвижками оси вращения измерительной плоскости, заключающемся в том, что в плоскости сканирования, перпендикулярной оси вращения измерительной плоскости, измеряют азимутальные углы между линиями визирования не менее трех разнесенных реперных отражателей, измеряют азимутальный угол между фиксированным нулевым положением вращающейся измерительной плоскости импульсного оптического локатора и линией визирования одного из реперных отражателей, измеряют временные интервалы между моментами совпадения вращающейся измерительной плоскости импульсного оптического локатора с реперными отражателями, измеряют временной интервал между моментом прохождения фиксированного нулевого положения измерительной плоскости импульсного оптического локатора и моментом ее совпадения с одним из реперных отражателей, определяют по измеренным временным интервалам азимутальные углы между линиями визирования реперных отражателей и азимутальный угол между нулевым положением измерительной плоскости оптического локатора и одним из реперных отражателей и формируют момент импульса лоцирования очередного реперного отражателя с учетом измеренных в предыдущие моменты временных интервалов дальности до очередного реперного отражателя и длительности импульса лоцирования, формируют дополнительную вращающуюся приемно-передающую диаграмму импульсного оптического локатора, измерительная плоскость которой отклонена на некоторый угол от измерительной плоскости основной диаграммы вдоль оси, лежащей в измерительной плоскости основной диаграммы и перпендикулярной оси вращения обеих диаграмм, измеряют временные интервалы между моментами совпадения каждого реперного отражателя с измерительными плоскостями, по измеренным временным интервалам и периоду вращения диаграмм в системе координат неподвижных реперных отражателей, вычисляемому путем суммирования временных интервалов между моментами лоцирования всех реперных отражателей, с учетом геометрии расположения обеих измерительных плоскостей определяют угловое положение каждого реперного отражателя относительно плоскости сканирования, по измеренным азимутальным углам, измеренным угловым положениям реперных отражателей и заданным трехмерным координатам определяют трехмерные линейные координаты оптического локатора и его угловое положение в пространстве, т. о есть угловое положение плоскости сканирования и нулевого положения вращающейся измерительной плоскости, по линейным и угловым координатам оптического локатора и измеренному угловому положению плоскости сканирования относительно транспортного средства с учетом положения импульсного оптического локатора на транспортном средстве определяют трехмерные линейные и угловые координаты требуемого элемента транспортного средства, по угловым положениям реперных отражателей осуществляют также управление положением плоскости сканирования импульсного оптического локатора, удерживая реперные отражатели в поле зрения импульсного оптического локатора. На фиг. 1 изображена функциональная схема устройства для определения координат транспортного средства; на фиг. 2 - геометрический чертеж, поясняющий метод измерения углового положения отражателей относительно плоскости сканирования; на фиг. 3 - геометpический чертеж, иллюстрирующий алгоритм удержания отражателей в поле зрения локатора. Устройство для определения координат транспортного средства содержит реперный отражатель 1, базовую платформу 2, вращающуюся платформу 3, электродвигатель 4, двигатель 5 разгрузки, усилитель 6 мощности, преобразователь 7 кода в напряжение, регистр 8 кода управления двигателем разгрузки, вычислитель 9, блок 10 связи с вычислителем, формирующую систему 11 излучателя, основной оптический излучатель 12, дополнительный оптический излучатель 13, схему 14 формирования импульса запуска основного излучателя, схему 15 формирования импульса запуска дополнительного излучателя, приемный объектив 16, основной фоточувствительный элемент 17, дополнительный фоточувствительный элемент 18, приемно-усилительный тракт, схему 20 формирования импульса совпадения пеленгационного направления с отражателем, регистр 21 кода временного положения импульса совпадения, регистр 22 кода временного момента нулевого положения измерительной плоскости, датчик 23 нулевого положения вала, кварцевый генератор 24 кольцевой счетчик 25. Устройство, реализующее способ определения координат транспортного средства, работает следующим образом. Электродвигатель 4 осуществляет вращение с постоянной угловой скоростью вращающейся платформы 3 и соответственно вращение в пространстве приемных диаграмм оптического локатора, формируемых приемным объективом 16 и фоточувствительными элементами 17, 18, а также передающих диаграмм, формируемых оптическими излучателями 12, 13 и формирующими системами 11. Измерение временных интервалов между моментами совпадения вращающейся измерительной плоскости основной приемно-передающей диаграммы оптического локатора с реперными отражателями осуществляется следующим образом. Основная диаграмма оптического локатора формируется узкой в горизонтальном направлении (порядка 1 угловой минуты) и широкой в вертикальном направлении (порядка 20о). Ширина передающей диаграммы в вертикальном направлении выбирается равной ширине приемной диаграммы, а в горизонтальном направлении превышает ее на величину максимального рассовмещения диаграмм за счет запаздывания отраженного сигнала, равного   p= 2Dmax p= 2Dmax  вр/c, где Dmax - максимальная дальность реперного отражателя 1; вр- угловая скорость вращения приемно-передающих диаграмм; с - скорость света. Когда основная приемная диаграмма займет в пространстве угловое положение, отстоящее на величину 2Di вр/c от проекции очередного реперного отражателя 1, дальность которого равна Di, осуществляется запуск основного оптического излучателя 12. Управление временным моментом запуска с вычислителя 9 будет описано ниже. Электрический сигнал отраженного от реперного отражателя 1 светового импульса с выхода фоточувствительного элемента 17, пройдя приемно- усилительный тракт 19, поступает на вход схемы формирования импульса совпадения пеленгационного направления с реперным отражателем 20, где он сравнивается с некоторым уровнем, при превышении которого формируется фронт прямоугольного импульса. Этот импульс поступает на вход записи регистра кода временного положения импульса совпадения 21, и в нем осуществляется параллельная перепись информации текущего времени таймера Ti с кольцевого счетчика 25. С выхода последовательного считывания этого регистра 21 информация о моменте времени совпадения Tiчерез блок 10 связи поступает на вычитатель 9. Временной интервал Tiмежду моментами лоцирования i-го и предыдущего i-1 отражателя в вычислителе 9 вычисляется по разности кодов временных положений импульсов лоцирования, то есть Ti-Ti-Ti-1. При этом, если оказывается, что величина Ti меньше, чем Ti-1, что означает переход кольцевого счетчика 25 через ноль, то к величине Ti добавляется число, равное коду полного временного цикла кольцевого счетчика 25. Для устранения неоднозначности полный временной цикл кольцевого счетчика 25 выбирается заведомо больше периода вращения приемно-передающих диаграмм. По измеренным интервалам Ti, Ti-1, . . . , Ti-(k-1) где k - количество лоцируемых реперных отражателей) в вычислителе рассчитываются азимутальные углы между линиями визирования реперных отражателей по формуле вр/c, где Dmax - максимальная дальность реперного отражателя 1; вр- угловая скорость вращения приемно-передающих диаграмм; с - скорость света. Когда основная приемная диаграмма займет в пространстве угловое положение, отстоящее на величину 2Di вр/c от проекции очередного реперного отражателя 1, дальность которого равна Di, осуществляется запуск основного оптического излучателя 12. Управление временным моментом запуска с вычислителя 9 будет описано ниже. Электрический сигнал отраженного от реперного отражателя 1 светового импульса с выхода фоточувствительного элемента 17, пройдя приемно- усилительный тракт 19, поступает на вход схемы формирования импульса совпадения пеленгационного направления с реперным отражателем 20, где он сравнивается с некоторым уровнем, при превышении которого формируется фронт прямоугольного импульса. Этот импульс поступает на вход записи регистра кода временного положения импульса совпадения 21, и в нем осуществляется параллельная перепись информации текущего времени таймера Ti с кольцевого счетчика 25. С выхода последовательного считывания этого регистра 21 информация о моменте времени совпадения Tiчерез блок 10 связи поступает на вычитатель 9. Временной интервал Tiмежду моментами лоцирования i-го и предыдущего i-1 отражателя в вычислителе 9 вычисляется по разности кодов временных положений импульсов лоцирования, то есть Ti-Ti-Ti-1. При этом, если оказывается, что величина Ti меньше, чем Ti-1, что означает переход кольцевого счетчика 25 через ноль, то к величине Ti добавляется число, равное коду полного временного цикла кольцевого счетчика 25. Для устранения неоднозначности полный временной цикл кольцевого счетчика 25 выбирается заведомо больше периода вращения приемно-передающих диаграмм. По измеренным интервалам Ti, Ti-1, . . . , Ti-(k-1) где k - количество лоцируемых реперных отражателей) в вычислителе рассчитываются азимутальные углы между линиями визирования реперных отражателей по формуле  i= 2 i= 2 Ti/ Ti/  Ti-j , где i = i, i-1, . . . , i-(k-1) Временной момент прохождения фиксированного нулевого положения измерительной плоскости измеряется следующим образом. В момент прохождения нулевого положения импульс датчика 23 нулевого положения поступает на вход записи регистра кода временного момента нулевого положения 22 и в него осуществляется параллельная перепись информации с закольцованного счетчика 25. Далее эта информация Tн через блок 10 связи поступает на вычислитель 9. В вычислителе 9 вычисляется временной интервал между моментом прохождения нулевого положения и моментом лоцирования предыдущего реперного отражателя Ti. Tнi = Tн-Ti По вычисленному временному интервалу Tн и вычисленным интервалам между моментами лоцирования всех реперных отражателей Ti, Ti-1, . . . , Ti-(k-1) вычисляется азимутальный угол между нулевым положением измерительной плоскости и проекцией i-го реперного отражателя нi= 2Tнi/ Ti-j , где i = i, i-1, . . . , i-(k-1) Временной момент прохождения фиксированного нулевого положения измерительной плоскости измеряется следующим образом. В момент прохождения нулевого положения импульс датчика 23 нулевого положения поступает на вход записи регистра кода временного момента нулевого положения 22 и в него осуществляется параллельная перепись информации с закольцованного счетчика 25. Далее эта информация Tн через блок 10 связи поступает на вычислитель 9. В вычислителе 9 вычисляется временной интервал между моментом прохождения нулевого положения и моментом лоцирования предыдущего реперного отражателя Ti. Tнi = Tн-Ti По вычисленному временному интервалу Tн и вычисленным интервалам между моментами лоцирования всех реперных отражателей Ti, Ti-1, . . . , Ti-(k-1) вычисляется азимутальный угол между нулевым положением измерительной плоскости и проекцией i-го реперного отражателя нi= 2Tнi/  Ti-j Измерение временных интервалов между моментами совпадения каждого реперного отражателя с основной и дополнительной измерительной плоскостью и соответственно вычисление углового положения каждого реперного отражателя осуществляют следующим образом. Дополнительные приемная и передающая диаграммы формируются идентичными основной, но развернутыми относительно нее вдоль оси, перпендикулярной оси вращения диаграммы на некоторый угол Ti-j Измерение временных интервалов между моментами совпадения каждого реперного отражателя с основной и дополнительной измерительной плоскостью и соответственно вычисление углового положения каждого реперного отражателя осуществляют следующим образом. Дополнительные приемная и передающая диаграммы формируются идентичными основной, но развернутыми относительно нее вдоль оси, перпендикулярной оси вращения диаграммы на некоторый угол  . При этом как видно из фиг. 2, временной интервал между совпадениями i-го реперного отражателя с обеими измерительными плоскостями ti будет связан с угловой скоростью вращения диаграмм вр угловым положением реперного отражателя . При этом как видно из фиг. 2, временной интервал между совпадениями i-го реперного отражателя с обеими измерительными плоскостями ti будет связан с угловой скоростью вращения диаграмм вр угловым положением реперного отражателя  i и углом соотношением: sin (врti) = tgtgi Когда дополнительная диаграмма займет в пространстве угловое положение, отстоящее на величину 2Di вр/c от очередного реперного отражателя, осуществляется запуск дополнительного оптического излучателя (управление временным моментом запуска с вычислителя 9 будет описано ниже). Электрический сигнал отраженного от реперного отражателя 1 светового импульса с выхода фоточувствительного элемента 18, пройдя приемно-усилительный тракт 19, поступает на вход схемы формирования импульса совпадения пеленгационного направления с реперным отражателем 20. Импульс со схемы совпадения осуществляет перепись в регистр кода временного положения импульса совпадения 21 информации текущего времени таймера Tдi с закольцованного счетчика 25. С выхода последовательного считывания этого регистра 21 информация о моменте времени совпадения Тдiпоступает через блок 10 связи на вычислитель 9. Временной интервал между моментами лоцирования отражателя основной и дополнительной измерительными плоскостями вычисляется по формуле ti = Tдi-Ti Соответственно, угловое положение i-го реперного отражателя вычисляется по формуле i= arctg[sin(вр i и углом соотношением: sin (врti) = tgtgi Когда дополнительная диаграмма займет в пространстве угловое положение, отстоящее на величину 2Di вр/c от очередного реперного отражателя, осуществляется запуск дополнительного оптического излучателя (управление временным моментом запуска с вычислителя 9 будет описано ниже). Электрический сигнал отраженного от реперного отражателя 1 светового импульса с выхода фоточувствительного элемента 18, пройдя приемно-усилительный тракт 19, поступает на вход схемы формирования импульса совпадения пеленгационного направления с реперным отражателем 20. Импульс со схемы совпадения осуществляет перепись в регистр кода временного положения импульса совпадения 21 информации текущего времени таймера Tдi с закольцованного счетчика 25. С выхода последовательного считывания этого регистра 21 информация о моменте времени совпадения Тдiпоступает через блок 10 связи на вычислитель 9. Временной интервал между моментами лоцирования отражателя основной и дополнительной измерительными плоскостями вычисляется по формуле ti = Tдi-Ti Соответственно, угловое положение i-го реперного отражателя вычисляется по формуле i= arctg[sin(вр ti/tg] , где угловая скорость вращения диаграмм вр вычисляется через временные интервалы между моментами лоцирования всех реперных отражателей по формуле вр= 2/ ti/tg] , где угловая скорость вращения диаграмм вр вычисляется через временные интервалы между моментами лоцирования всех реперных отражателей по формуле вр= 2/  Ti-j Управление временным моментом запуска основного и дополнительного излучателей осуществляется следующим образом. После лоцирования в n-м цикле вращения очередного реперного отражателя, измерения временного момента его лоцирования Ti(n) основной диаграммой в вычислителе осуществляется расчет момента запуска импульса лоцирования очередного i + 1-го отражателя основной диаграммой по формуле T(n)3i+1= Ti(n)+(n-i+11)/вр-2Di+1/C- Ti-j Управление временным моментом запуска основного и дополнительного излучателей осуществляется следующим образом. После лоцирования в n-м цикле вращения очередного реперного отражателя, измерения временного момента его лоцирования Ti(n) основной диаграммой в вычислителе осуществляется расчет момента запуска импульса лоцирования очередного i + 1-го отражателя основной диаграммой по формуле T(n)3i+1= Ti(n)+(n-i+11)/вр-2Di+1/C-  u/2, где (n-i+11) - измеренный в предыдущем цикле вращения азимутальный угол между i + 1-м и i-м реперным отражателем; С - скорость света; u- длительность импульса лоцирования. Момент запуска импульса лоцирования очередного i + 1-го реперного отражателя дополнительной диаграммой вычисляется по формуле T3gi+1(n) = T3i+1(n) + ti+1(n-1), где ti+1(n-1) - измеренный в предыдущем цикле вpащения временной интервал между моментом совпадения i + 1-го реперного отражателя с измерительными плоскостями. Рассчитанные в вычислителе коды моментов запуска основного и дополнительного излучателей поступают через блок 10 связи на схемы формирования импульсов запуска основного 14 и дополнительного 15 излучателей соответственно. В этих схемах коды запоминаются в регистрах и при совпадении их с кодом на параллельных выходах закольцованного счетчика 25 вырабатываются соответствующие импульсы запуска, поступающие на излучатели 12 и 13. Таким образом, вышеописанная работа устройства и вычисления позволяют после каждого цикла вращения диаграмм получить рассчитанные в вычислителе значения азимутальных углов между проекциями реперных отражателей i, азимутальный угол между нулевым положением вращающейся диаграммы и проекцией одного из реперных отражателей н2 и угловые положения реперных отражателей i относительно плоскости сканирования. По этим величинам и заданным координатам реперных отражателей в некоторой неподвижной прямоугольной системе координат могут быть рассчитаны трехмерные координаты оптического локатора в этой системе координат и его угловое положение. Схема этих вычислений может быть следующей Для простоты рассмотрим случай, когда имеется минимальное количество реперных отражателей, то есть три. При этом будем считать, что начало неподвижной системы координат находится в точке одного из отражателей (например, первого), ось Х направлена от первого отражателя к второму, ось У лежит в плоскости, проходящей через все три отражателя, и перпендикулярна оси Х, ось Z перпендикулярна плоскости отражателей. Обозначим точки, в которых находятся первый, второй и третий отражатели, через О1, О2, О3 соответственно. Тогда вектора, соединяющие отражатели, будут выражаться: u/2, где (n-i+11) - измеренный в предыдущем цикле вращения азимутальный угол между i + 1-м и i-м реперным отражателем; С - скорость света; u- длительность импульса лоцирования. Момент запуска импульса лоцирования очередного i + 1-го реперного отражателя дополнительной диаграммой вычисляется по формуле T3gi+1(n) = T3i+1(n) + ti+1(n-1), где ti+1(n-1) - измеренный в предыдущем цикле вpащения временной интервал между моментом совпадения i + 1-го реперного отражателя с измерительными плоскостями. Рассчитанные в вычислителе коды моментов запуска основного и дополнительного излучателей поступают через блок 10 связи на схемы формирования импульсов запуска основного 14 и дополнительного 15 излучателей соответственно. В этих схемах коды запоминаются в регистрах и при совпадении их с кодом на параллельных выходах закольцованного счетчика 25 вырабатываются соответствующие импульсы запуска, поступающие на излучатели 12 и 13. Таким образом, вышеописанная работа устройства и вычисления позволяют после каждого цикла вращения диаграмм получить рассчитанные в вычислителе значения азимутальных углов между проекциями реперных отражателей i, азимутальный угол между нулевым положением вращающейся диаграммы и проекцией одного из реперных отражателей н2 и угловые положения реперных отражателей i относительно плоскости сканирования. По этим величинам и заданным координатам реперных отражателей в некоторой неподвижной прямоугольной системе координат могут быть рассчитаны трехмерные координаты оптического локатора в этой системе координат и его угловое положение. Схема этих вычислений может быть следующей Для простоты рассмотрим случай, когда имеется минимальное количество реперных отражателей, то есть три. При этом будем считать, что начало неподвижной системы координат находится в точке одного из отражателей (например, первого), ось Х направлена от первого отражателя к второму, ось У лежит в плоскости, проходящей через все три отражателя, и перпендикулярна оси Х, ось Z перпендикулярна плоскости отражателей. Обозначим точки, в которых находятся первый, второй и третий отражатели, через О1, О2, О3 соответственно. Тогда вектора, соединяющие отражатели, будут выражаться:  ) )   r12 - расстояние между первым и вторым отражателями; r13 - расстояние между первым и третьим отражателями; r23 - расстояние между вторым и третьим отражателями. Направляющие орты введенной неподвижной системы координат i и j могут быть вычислены через линейную комбинацию векторов r12 - расстояние между первым и вторым отражателями; r13 - расстояние между первым и третьим отражателями; r23 - расстояние между вторым и третьим отражателями. Направляющие орты введенной неподвижной системы координат i и j могут быть вычислены через линейную комбинацию векторов  , ,   Введем еще одну систему координат, связанную с текущим положением локатора. Центр этой системы координат лежит на пересечении плоскости сканирования локатора и оси вращения диаграмм. Обозначим эту точку О. Ось X' лежит в плоскости сканирования и совпадает с фиксированным нулевым положением вращающейся измерительной плоскости. Ось Y' перпендикулярна оси X' и также лежит в плоскости сканирования. Ось Z' перпендикулярна плоскости сканирования. Измерив азимутальные углы между линиями визирования всех отражателей в системе координат локатора и азимутальный угол одного из отражателей по отношению к оси X', легко вычислить азимутальные углы всех отражателей в плоскости, отсчитываемые от оси X. Обозначим эти углы соответственно каждому отражателю через Введем еще одну систему координат, связанную с текущим положением локатора. Центр этой системы координат лежит на пересечении плоскости сканирования локатора и оси вращения диаграмм. Обозначим эту точку О. Ось X' лежит в плоскости сканирования и совпадает с фиксированным нулевым положением вращающейся измерительной плоскости. Ось Y' перпендикулярна оси X' и также лежит в плоскости сканирования. Ось Z' перпендикулярна плоскости сканирования. Измерив азимутальные углы между линиями визирования всех отражателей в системе координат локатора и азимутальный угол одного из отражателей по отношению к оси X', легко вычислить азимутальные углы всех отражателей в плоскости, отсчитываемые от оси X. Обозначим эти углы соответственно каждому отражателю через  1, 2, 3. Угловые положения каждого отражателя в системе координат локатора 1,2, 3также получены в вышеописанных измерениях. Таким образом, координаты отражателей в системе координат локатора могут быть выражены: 1, 2, 3. Угловые положения каждого отражателя в системе координат локатора 1,2, 3также получены в вышеописанных измерениях. Таким образом, координаты отражателей в системе координат локатора могут быть выражены:  = (ricosicosi, ricosisini, risini) i = 1, 2, 3, где r1, r2, r3 - расстояния от локатора до соответствующих отражателей. Величины r1, r2, r3 непосредственно не измеряются, но могут быть найдены из следующей системы трех нелинейных уравнений: = (ricosicosi, ricosisini, risini) i = 1, 2, 3, где r1, r2, r3 - расстояния от локатора до соответствующих отражателей. Величины r1, r2, r3 непосредственно не измеряются, но могут быть найдены из следующей системы трех нелинейных уравнений:  Подставляя в эту систему уравнений координаты отражателей в системе координат локатора, расстояния между отражателями r12, r13, r23и решая ее численным (например, градиентным) способом, получаем численное значение величин и соответственно численные значения координат векторов ООi, i = 1, 2, 3, в системе координат локатора. Далее в этой же системе координат вычисляется через соответствующие линейные комбинации координаты векторов Подставляя в эту систему уравнений координаты отражателей в системе координат локатора, расстояния между отражателями r12, r13, r23и решая ее численным (например, градиентным) способом, получаем численное значение величин и соответственно численные значения координат векторов ООi, i = 1, 2, 3, в системе координат локатора. Далее в этой же системе координат вычисляется через соответствующие линейные комбинации координаты векторов  , ,  и координаты направляющих ортов i и j неподвижной системы координат. Обозначим вектора-столбцы координат направляющих ортов через величины: и координаты направляющих ортов i и j неподвижной системы координат. Обозначим вектора-столбцы координат направляющих ортов через величины:           Эти вектора-столбцы являются соответствующими столбцами трехмерной квадратной матрицы A поворота неподвижной системы координат относительно системы координат локатора, являющейся сомножителем при переточке координат векторов из неподвижной системы координат в локационную систему координат. Поскольку направляющий орт неподвижной системы координат Эти вектора-столбцы являются соответствующими столбцами трехмерной квадратной матрицы A поворота неподвижной системы координат относительно системы координат локатора, являющейся сомножителем при переточке координат векторов из неподвижной системы координат в локационную систему координат. Поскольку направляющий орт неподвижной системы координат  является векторным произведением ортов i и jiтретий вектор-столбец матрицы поворота A также является векторным произведением первых двух столбцов и соответственно вычисляется: a13 = a21 a32-a31 a22 a23 = a31 a12-a11 a32 a33 = a11 a22-a21 a12 Таким образом, все элементы матрицы поворота А численно вычисляются. Мы имеем вычисленные значения координат векторов в системе координат локатора и для пересчета этих векторов в неподвижную систему координат требуется вычислить матрицу В поворота системы координат локатора относительно неподвижной системы координат. Очевидно, что эта матрица является обратной по отношению к матрице A и рассчитывается соответствующим обращением матрицы A. B = A-1 Вычислив матрицу B, легко получить вектор-столбец координат локатора в неподвижной системе координат (обозначим его является векторным произведением ортов i и jiтретий вектор-столбец матрицы поворота A также является векторным произведением первых двух столбцов и соответственно вычисляется: a13 = a21 a32-a31 a22 a23 = a31 a12-a11 a32 a33 = a11 a22-a21 a12 Таким образом, все элементы матрицы поворота А численно вычисляются. Мы имеем вычисленные значения координат векторов в системе координат локатора и для пересчета этих векторов в неподвижную систему координат требуется вычислить матрицу В поворота системы координат локатора относительно неподвижной системы координат. Очевидно, что эта матрица является обратной по отношению к матрице A и рассчитывается соответствующим обращением матрицы A. B = A-1 Вычислив матрицу B, легко получить вектор-столбец координат локатора в неподвижной системе координат (обозначим его  ) через произведение вектора-столбца координат вектора ) через произведение вектора-столбца координат вектора  в системе координат локатора на матрицу B. в системе координат локатора на матрицу B.     Матрица поворота В полностью определяет угловое положение локатора в неподвижной системе координат. Действительно, задавая три последовательных поворота локационной системы координат относительно неподвижной как курс o (поворот вокруг оси Z), тангаж Матрица поворота В полностью определяет угловое положение локатора в неподвижной системе координат. Действительно, задавая три последовательных поворота локационной системы координат относительно неподвижной как курс o (поворот вокруг оси Z), тангаж  o (поворот вокруг развернутой оси Y) и крен o (поворот вокруг развернутой оси Y) и крен  o (поворот вокруг дважды развернутой оси X, ставшей осью X') можно выразить элементы первых двух столбцов матрицы В через эти углы. o (поворот вокруг дважды развернутой оси X, ставшей осью X') можно выразить элементы первых двух столбцов матрицы В через эти углы.   Как видно из этих выражений, углы o, o, o могут быть выражены в свою очередь через элементы b11, b21, b31, b32 матрицы В следующим образом: Как видно из этих выражений, углы o, o, o могут быть выражены в свою очередь через элементы b11, b21, b31, b32 матрицы В следующим образом:  Таким образом, изложенная схема расчетов позволяет вычислить как линейные трехмерные координаты локатора (вектор X) так и его угловое положение в пространстве - (углы o, o, o). Для управления положением плоскости сканирования с целью удержания отражателей в поле зрения локатора может быть использована следующая методика. Наилучшее удержание отражателей в поле зрения локатора будет осуществляться при обеспечении выравнивания угловых положений отражателей относительно плоскости сканирования. Рассмотрим алгоритм, обеспечивающий его выравнивание. Для иллюстрации алгоритма на фиг. 3 представлены проекции линий визирования первого (О1), второго (О2) и третьего (О3) отражателей на плоскость сканирования. При этом рассмотрим случай, когда угловое положение первого отражателя 1наибольшее, а угловое положение третьего отражателя 3 наименьшее, то есть выполняется условие 1>2>3. Проведем в плоскости сканирования через начало системы координат локатора (О) линию, симметричную относительно проекций линий визирования второго и третьего отражателей, и возьмем отрезок этой линии ОД, ближайший к проекции первого отражателя. Проведем также в плоскости сканирования через точку О линию, симметричную относительно проекций визирования первого и второго отражателей, и возьмем отрезок этой линии ОС, ближайший к проекции первого отражателя. Можно показать, что оптимальное положение плоскости наибольшего изменения угла места (перпендикулярной лежащей в плоскости сканирования оси ее поворота) должно лежать в сегменте СОД. Действительно, если мы имеем случай, когда 2 близко по величине 3, то очевидно, что плоскость максимального изменения угла места должна быть близка к линии ОД, так как в этом случае поворот плоскости сканирования вокруг оси, перпендикулярной ОД в сторону уменьшения угла 1, будет увеличивать углы 2 и 3, одновременно сохраняя их равенство и, таким образом будет достигнуто равенство всех углов 1,2, 3. Если же угол 2 близок к углу 1, то плоскость максимального изменения угла места должна быть близка к линии ОС, так как в этом случае поворот плоскости сканирования вокруг оси, перпендикулярной ОС в сторону уменьшения углов 1 и 2, будет сохранять их равенство, одновременно увеличивая угол 3, и таким образом обеспечит выравнивание всех трех углов. В общем случае положение плоскости максимального изменения угла места можно выбрать из условия: Таким образом, изложенная схема расчетов позволяет вычислить как линейные трехмерные координаты локатора (вектор X) так и его угловое положение в пространстве - (углы o, o, o). Для управления положением плоскости сканирования с целью удержания отражателей в поле зрения локатора может быть использована следующая методика. Наилучшее удержание отражателей в поле зрения локатора будет осуществляться при обеспечении выравнивания угловых положений отражателей относительно плоскости сканирования. Рассмотрим алгоритм, обеспечивающий его выравнивание. Для иллюстрации алгоритма на фиг. 3 представлены проекции линий визирования первого (О1), второго (О2) и третьего (О3) отражателей на плоскость сканирования. При этом рассмотрим случай, когда угловое положение первого отражателя 1наибольшее, а угловое положение третьего отражателя 3 наименьшее, то есть выполняется условие 1>2>3. Проведем в плоскости сканирования через начало системы координат локатора (О) линию, симметричную относительно проекций линий визирования второго и третьего отражателей, и возьмем отрезок этой линии ОД, ближайший к проекции первого отражателя. Проведем также в плоскости сканирования через точку О линию, симметричную относительно проекций визирования первого и второго отражателей, и возьмем отрезок этой линии ОС, ближайший к проекции первого отражателя. Можно показать, что оптимальное положение плоскости наибольшего изменения угла места (перпендикулярной лежащей в плоскости сканирования оси ее поворота) должно лежать в сегменте СОД. Действительно, если мы имеем случай, когда 2 близко по величине 3, то очевидно, что плоскость максимального изменения угла места должна быть близка к линии ОД, так как в этом случае поворот плоскости сканирования вокруг оси, перпендикулярной ОД в сторону уменьшения угла 1, будет увеличивать углы 2 и 3, одновременно сохраняя их равенство и, таким образом будет достигнуто равенство всех углов 1,2, 3. Если же угол 2 близок к углу 1, то плоскость максимального изменения угла места должна быть близка к линии ОС, так как в этом случае поворот плоскости сканирования вокруг оси, перпендикулярной ОС в сторону уменьшения углов 1 и 2, будет сохранять их равенство, одновременно увеличивая угол 3, и таким образом обеспечит выравнивание всех трех углов. В общем случае положение плоскости максимального изменения угла места можно выбрать из условия:  COM / MOD= 1-2/2-3 Величину сигнала управления на поворот плоскости сканирования можно выбирать пропорциональной максимальной разнице между угловыми положениями отражателей, то есть = C(1-3), где С - некоторый коэффициент пропорциональности. Таким образом, определив величину сигнала управления (пропорциональную заданной скорости поворота плоскости сканирования) и положение оси поворота и плоскости сканирования можно осуществить пересчет этого управления в координаты осей карданного подвеса базовой платформы 2, задающей положение плоскости сканирования. Далее вычисленные сигналы управления из вычислителя 9 поступают на регистры кода управления двигателем разгрузки 8, а с них на преобразователи кода в напряжение 7, сигналы с которых через усилители мощности 6 поступают на соответствующие двигатели разгрузки 5, устанавливаемые в осях карданного подвеса базовой платформы 2. Двигатели разгрузки осуществляют соответствующий поворот базовой платформы 2 и соответственно плоскости сканирования в пространстве. Ошибку измерения координат в предложенном способе можно оценить выражением COM / MOD= 1-2/2-3 Величину сигнала управления на поворот плоскости сканирования можно выбирать пропорциональной максимальной разнице между угловыми положениями отражателей, то есть = C(1-3), где С - некоторый коэффициент пропорциональности. Таким образом, определив величину сигнала управления (пропорциональную заданной скорости поворота плоскости сканирования) и положение оси поворота и плоскости сканирования можно осуществить пересчет этого управления в координаты осей карданного подвеса базовой платформы 2, задающей положение плоскости сканирования. Далее вычисленные сигналы управления из вычислителя 9 поступают на регистры кода управления двигателем разгрузки 8, а с них на преобразователи кода в напряжение 7, сигналы с которых через усилители мощности 6 поступают на соответствующие двигатели разгрузки 5, устанавливаемые в осях карданного подвеса базовой платформы 2. Двигатели разгрузки осуществляют соответствующий поворот базовой платформы 2 и соответственно плоскости сканирования в пространстве. Ошибку измерения координат в предложенном способе можно оценить выражением  l= D, где D - базовый размер реперной области; - ошибка пеленгации направления на реперный отражатель. Ошибку пеленгации можно оценить выражением = /2 l= D, где D - базовый размер реперной области; - ошибка пеленгации направления на реперный отражатель. Ошибку пеленгации можно оценить выражением = /2 m, где - ширина пеленгационной характеристики; m - соотношение сигнал-шум в приемном устройстве. Ширина пеленгационной характеристики определяется разрешением приемного объектива и может быть реализована на уровне десятков угловых секунд (порядка 10-4рад). В соответствии с этим при соотношении сигнал-шум 5-10 ошибка пеленгации может быть реализована на уровне единиц угловых секунд (порядка 10-5рад). Таким образом, при базовых размерах реперной области в несколько километров ошибка измерения координат в предложенном способе может составлять несколько сантиметров. (56) Малорацкий Л. Г. и Никаноров В. П. Радионавигационная система автовождения машинно-тракторного агрегата. - "Тракторы и сельхозмашины", N 3, 1986, с. 24-26. Авторское свидетельство СССР N 1427608, кл. A 01 B 69/04, 1985. m, где - ширина пеленгационной характеристики; m - соотношение сигнал-шум в приемном устройстве. Ширина пеленгационной характеристики определяется разрешением приемного объектива и может быть реализована на уровне десятков угловых секунд (порядка 10-4рад). В соответствии с этим при соотношении сигнал-шум 5-10 ошибка пеленгации может быть реализована на уровне единиц угловых секунд (порядка 10-5рад). Таким образом, при базовых размерах реперной области в несколько километров ошибка измерения координат в предложенном способе может составлять несколько сантиметров. (56) Малорацкий Л. Г. и Никаноров В. П. Радионавигационная система автовождения машинно-тракторного агрегата. - "Тракторы и сельхозмашины", N 3, 1986, с. 24-26. Авторское свидетельство СССР N 1427608, кл. A 01 B 69/04, 1985.
Формула изобретенияСПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАНСПОРТНОГО СРЕДСТВА с помощью расположенного на транспортном средстве импульсного оптического локатора с вращающейся вокруг оси измерительной плоскостью приемно-передающей диаграммы и управляемыми двухкоординатными подвижками оси вращения измерительной плоскости, заключающийся в том, что в плоскости сканирования, перпендикулярной оси вращения измерительной поскости, измеряют азимутальные углы между линиями визирования не менее трех разнесенных реперных отражателей, измеряют азимутальный угол между фиксированным нулевым положением вращающейся измерительной плоскости импульсного оптического локатора и линией визирования одного из реперных отражателей, измеряют временные интервалы между моментами совпадения вращающейся измерительной плоскости импульсного оптического локатора с реперными отражателями, измеряют временной интервал между моментом прохождения фиксированного нулевого положения измерительной плоскости импульсного оптического локатора и моментом ее совпадения с одним из реперных отражателей, определяют по измеренным временным интервалам азимутальные углы между линиями визирования реперных отражателей и азимутальный угол между нулевым положением измерительной плоскости импульсного оптического локатора и одним из реперных отражателей, формируют момент импульса лоцирования очередного реперного отражателя с учетом измеренных в предыдущие моменты временных интервалов, дальности до очередного реперного отражателя и длительности импульса лоцирования, отличающийся тем, что формируют дополнительную вращающуюся приемно-передающую диаграмму импульсного оптического локатора, измерительная плоскость которой отклонена на некоторый угол от измерительной плоскости основной диаграммы вдоль оси, лежащей в измерительной плоскости основной диаграммы и перпендикулярной оси вращения обеих диаграмм, измеряют временные интервалы между моментами совпадения каждого реперного отражателя с измерительными плоскостями, по измеренным временным интервалам и периоду вращения диаграмм в системе координат неподвижных реперных отражателей, вычисляемому путем суммирования временных интервалов между моментами лоцирования всех реперных отражателей, с учетом геометрии расположения обеих измерительных плоскостей определяют угловое положение каждого реперного отражателя относительно плоскости сканирования, по измеренным азимутальным углам, измеренным угловым положениям реперных отражателей и их заданным трехмерным координатам определяют трехмерные линейные координаты оптического локатора и его угловое положение в пространстве, т. е. угловое положение плоскости сканирования, и нулевое положение вращающейся измерительной плоскости, по линейным и угловым координатам оптического локатора и измеренному угловому положению плоскости сканирования относительно транспортного средства с учетом положения импульсного оптического локатора на транспортном средстве определяют трехмерные линейные и угловые координаты требуемого элемента транспортного средства, по угловым положениям реперных отражателей осуществляют также управление положением плоскости сканирования импульсного оптического локатора, удерживая реперные отражателя в поле зрения импульсного оптического локатора.MM4A Досрочное прекращение действия патента Российской Федерации на изобретение из-за неуплаты в установленный срок пошлины за поддержание патента в силе Дата прекращения действия патента: 23.11.1994 Номер и год публикации бюллетеня: 9-2001 Извещение опубликовано: 27.03.2001 Популярные патенты: 2447645 Аппарат для обмолота коробочек семян ... на фиг.6,7 - общий вид узла обмолота коробочек семян; на фиг.8 - загрузочный бункер; на фиг.9 - выгрузная сменная насадка. Аппарат для обмолота коробочек семян содержит цилиндрический корпус 1, загрузочный бункер 2, установленный на корпусе 1 аппарата и закрепленный болтовым соединением 15, выгрузную сменную насадку 3, выполненную из листа полукруглой формы с продолговатыми по всей длине листа сквозными ячейками (из стального листа с продолговатыми по всей длине полукруга сквозными ячейками) и закрепленную к корпусу 1 посредством болтовых соединений 14, выгрузного бункера 10, установленного к раме 18 корпуса 1 сваркой. В корпусе 1 установлен узел обмолота коробочек семян, ... 2492633 Устройство для автоматического полива ... подачу питающей жидкости в точку полива, расположенную выше уровня свободной поверхности питающей жидкости.Наиболее близким по технической сущности устройством (прототипом) к предлагаемому является система автополива, предложенная Н.В. Гулиа (источник информации: Поисковая система Яндекс. SAMOSTROJ.RU - Автополив и обратный клапан. Комментарий от 20.12.09).Система содержит частично заполненную водой бочку, расположенную над водоемом отверстием книзу, отверстие закрыто пробкой с двумя шлангами (трубопроводами) в ней, оба шланга имеют по клапану. Один шланг опущен в водоем. Этот шланг имеет впускной клапан, позволяющий воде только входить в бочку, а другой идет в теплицу с ... 2189736 Способ отбора гибридов кукурузы, устойчивых к засухе и стеблевым гнилям ... засухоустойчивости является ремонтантность, т.е. способность растений в условиях стресса поддерживать высокую жизнеспособность листьев и стеблей, обеспечивая формирование полноценных початков. Формирование полноценных початков у устойчивых к засухе гибридов неремонтантного типа приводит к развитию восприимчивости к стеблевым гнилям в связи с генетически предопределенным большим выносом углеводов из стеблей и листьев в початки (6), что является основанием для их браковки. Браковке подлежат также гибриды, у которых признак ремонтантности "поддерживается" за счет явно выраженной редукции початков, т.е. вследствие перераспределения метаболитов в пользу стеблей и листьев. Не ... 2056743 Установка для выращивания пушных зверей ... если температура воздуха в помещении выше заданной величины (см. например, патент США N 4476809, кл. A 01 K 1/00, опубл. 1984 г.). Основным недостатком вышеописанной системы является невозможность поддержания температуры воздуха в помещении для выращивания животных на низком уровне, в т. ч. ниже 0оС, что сужает область эффективного использования системы. Известна также установка для выращивания живых организмов. Установка содержит несколько изолированных от внешней среды камер для выращивания организмов. Имеется кондиционер для подачи в камеры воздуха заданной температуры и влажности. Каждая камера оборудована индивидуальной системой регулирования. Кондиционер имеет центральную ... 2464765 Сепарирующее устройство корнеклубнеуборочной машины ... 2. Упругие элементы 4 выполнены в виде прутков овального сечения, изготовленных из эластичного материала, и ориентированы таким образом, что максимальная ширина их овального сечения параллельна направлению движения пруткового элеватора 2, чем обеспечивается возможность их прогиба на некоторый угол в направлении боковых стенок 6 рамы 1 и ограничение контакта корнеклубнеплодов с металлической поверхностью боковых стенок 6 рамы 1, что снижает повреждения корнеклубнеплодов. При взаимодействии корнеклубнеплодов с упругими элементами 4 пруткового элеватора 2 и корнеклубнеплоды, и упругие элементы 4 деформируются, при этом образуется некоторая контактная площадка. Боковая поверхность ... |
Еще из этого раздела: 2124290 Препаративная форма в виде раствора для местного применения для обработки животных (варианты), способ получения и способ обработки животных (варианты) 2154939 Способ выращивания кроликов и устройство для его осуществления 2019090 Самонапорная оросительная система 2062564 Способ оценки устойчивости растений к засухе северного и южного типа на ранних этапах онтогенеза 2112361 Контроллер программируемого управления поливом 2243658 Способ повышения урожайности картофеля и томатов 2463776 Система и способ для массовой валки деревьев 2130247 Замкнутый пневмосепаратор 2229783 Способ посева семян трав и кустарников для создания пастбищ 2271092 Сортировка барабанного типа |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||