Способ выгрузки корма из башенного хранилища и устройство для его осуществленияПатент на изобретение №: 2013929 Автор: Ащеулов А.А., Нюшков Н.В. Патентообладатель: Сибирский научно-исследовательский и проектно- технологический институт животноводства Дата публикации: 15 Июня, 1994 Адрес для переписки: подача заявки03.07.1991 публикация патента15.06.1994 Изображения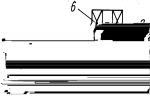 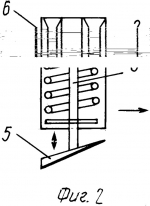  Использование: в сельскохозяйственном машиностроении, в частности в способах выгрузки корма из башенного хранилища в определенном устройстве. Сущность изобретения: устройство включает фрезерующий рабочий орган, который при выгрузке корма опускается на поверхность корма. За счет регулирования скорости привода фрезерующего рабочего органа при помощи регулятора, связанного с датчиками плотности и рельефа поверхности фрезеруемого корма или датчиком нагрузки привода рабочего органа и соответствующими задатчиками обеспечивают технологическую надежность и равномерность выгрузки корма из башни. 2 с. и 2 з. п. ф-лы, 3 ил. , , ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУИзобретение относится к сельскому хозяйству, а именно к автоматизации средств разгрузки башенных хранилищ кормов. На фиг. 1 изображен фрезерующий рабочий орган с датчиком плотности и рельефа корма, поперечный разрез; на фиг. 2 - вариант датчика плотности и рельефа корма с ползуном; на фиг. 2 - блок-схема управления приводом фрезерующего рабочего органа. Способ выгрузки корма из башенных хранилищ осуществляют следующим образом. Фрезерующий рабочий орган перемещают по поверхности корма и опускают вниз. Осуществляется послойный забор корма и выгрузка его из башни. Перед выгрузкой задают значения величин плотности и рельефа поверхности корма и нагрузку на фрезерующий рабочий орган. При фрезеровании непрерывно измеряют текущие значения величин плотности и рельефа поверхности корма и нагрузки на фрезерующий рабочий орган. При этом изменяют скорость фрезерования по результатам вычитания текущих значений величин плотности и рельефа поверхности корма из заданных, а глубину фрезерования изменяют по результатам вычитания текущих значений величины нагрузки на фрезерующий рабочий орган из заданной. Переходные процессы ведут до момента равенства текущего и заданного значений. Следствием этого является постоянное заданное значение подачи выгружаемого корма из башни и стабильность процесса выгрузки. Устройство для выгрузки корма из башенного хранилища (см. фиг. 1) содержит фрезерующий рабочий орган 1 с закрепленным на нем датчиком 2 плотности и рельефа корма. Датчик 2 выполнен в виде подпружиненного стержня 3, нижний конец которого снабжен роликом 4 или ползуном 5 ( см. фиг. 2), а верхний конец расположен в индукционной катушке 6 и является ее подвижным сердечником. Пружина 7 стержня 3 оттарирована на определенное усилие. Датчик 8 нагрузки рабочего органа 1 выполнен в виде трансформатора тока, включенного в цепь привода 9 рабочего органа и имеет на выходе изменяемый от нагрузки электродвигателя привода ток. Управление приводом 9 осуществляется блоком управления 10, например, кнопочной станцией, последовательно связанным с регулятором 11, например, тиристорной станцией управления ТСУР-16, включенной в статорные цепи электродвигателя привода 9 в качестве бесконтактного коммутатора регулятора напряжения и позволяющей регулировать скорость электродвигателя в диапазоне 1:10. Блок 10 также связан с блоком вычитания 12, датчиком 2 и задатчиком 13 плотности и рельефа корма и датчиком 8 и задатчиком 14 нагрузки на рабочий орган 1. В качестве задатчика 13 применен регулируемый источник напряжения, например, делитель напряжения на регулируемом резисторе. В качестве задатчика 14 применяется регулируемый источник тока. Датчики 2 и 8 своими выходами соединены с первыми входами блока 12 вычитания, вторые входы которого соединены с выходами задатчиков 13 и 14. Выход блока 12 вычитания соединен с первым входом регулятора 11 привода, второй вход которого соединен с блоком управления 10, а выход регулятора 11 связан с управляющим входом привода 9 рабочего органа 1. Датчик 2 вместо катушки 6 может снабжаться регулируемым резистором, связанным со стержнем 3. Однако датчики 2 и 8 могут быть и иного типа, обеспечивающего выдачу непрерывного сигнала пропорционально измеренному значению, соответственно другого типа могут быть использованы задатчики 13 и 14. Устройство для выгрузки корма из башенного хранилища работает следующим образом. На задатчиках 13 и 14 устанавливают сигнал, пропорциональный требуемому значению подачи корма. Блок 10 управления выдает команду на привод 9, начинающий вращать фрезерующий рабочий орган 1 и опускать его вниз. Ролик 4 или ползун 5 датчика 2 вдавливается пружиной 7 в поверхность корма и скользит по ней, копируя рельеф. Перемещение стержня 3 внутри катушки 6, вызванное локальными пустотами, участками повышенной плотности или гребнями и впадинами рельефа поверхности корма, вызывает пропорциональное изменение тока в цепи катушки 6. Вышеназванные условия фрезерования вызывают также изменение нагрузки на привод 9 и, соответственно, пропорциональное изменение тока в цепи датчика 7. Сигналы с датчиков 2 и 8 и соответственно с задатчиков 13 и 14 поступают в блок 12 вычитания, где взаимно минусуются. Блок 12 не выдает сигнал на регулятор 11 скорости. Привод вращает и опускает вниз рабочий орган с постоянной скоростью. При изменении плотности или рельефа поверхности корма и соответственно нагрузки на привод рабочего органа срабатывают датчики 2 и 3, измененный сигнал от них поступает в блок вычитания. Сигнал рассогласования от блока 12 поступает в регулятор 11 привода 9. При превышении значения плотности корма или возникновения гребня на поверхности регулятор 11 по сигналу рассогласования снижает выходное напряжение и привод снижает число оборотов. После выравнивания сигналов с датчиков 2 и 8 и задатчиков 13 и 14 сигнал рассогласования на выходе блока 12 исчезает, и регулятор 11 устанавливает стабильное напряжение и число оборотов привода 9. При понижении значения плотности корма от заданной или возникновения впадины на поверхности регулятор скорости по сигналу рассогласования повышает выходное напряжение и число оборотов привода 9. Увеличивается скорость вращения рабочих органов 1, они опускаются вниз с большей скоростью на большую глубину фрезерования. При исчезновении сигнала рассогласования регулятор 11 устанавливает стабильное напряжение и число оборотов привода 9. При возникновении в дальнейшем изменения значений плотности, рельефа поверхности фрезеруемого корма и нагрузки на привод рабочего органа все операции повторяются. Устройство позволяет повысить техническую и технологическую надежность выгрузки, обеспечить равномерную разгрузку и подачу корма непосредственно из хранилища в животноводческое помещение, автоматизировать нормированную раздачу корма.ФОРМУЛА ИЗОБРЕТЕНИЯ1. Способ выгрузки корма из башенного хранилища, включающий фрезерование рабочим органом корма и выгрузку его из башенного хранилища, отличающийся тем, что задают значения величин плотности и рельефа поверхности корма и нагрузки на фрезерующий рабочий орган, измеряют текущие значения величин плотности и рельефа поверхности корма и нагрузки на фрезерующий рабочий оргаг, при этом изменяют скорость фрезерования по результатам вычитания текущих значений величин плотности и рельефа поверхности корма из заданных, а глубину фрезерования изменяют по результатам вычитания текущих значений величины нагрузки на фрезерующий рабочий орган из заданных. 2. Устройство для выгрузки корма из башенного хранилища, включающее установленные в хранилище фрезерующий рабочий орган с приводом и выгрузной механизм, отличающееся тем, что оно снабжено датчиком и задатчиком значений плотности и рельефа корма, датчиком и задатчиком значений нагрузки на фрезерующий рабочий орган, блоком вычитания, блоком управления и регулятором, при этом выходы датчика и задатчика значений плотности и рельефа корма, датчика и задатчика значений нагрузки на фрезерующий рабочий орган соединены с соответствующими входами блока вычитания, выход которого связан с первым входом регулятора, а выход блока управления подключен к второму входу регулятора, причем выход регулятора соединен с приводом фрезерующего рабочего органа. 3. Устройство по п.2, отличающееся тем, что датчик текущих значений плотности и рельефа поверхности корма выполнен в виде индуктивного датчика с подпружиненным сердечником, свободный конец которого снабжен роликом для контакта с поверхностью корма и установлен перед фрезерующим рабочим органом. 4. Устройство по п.2, отличающееся тем, что датчик нагрузки на фрезерующий рабочий орган выполнен в виде индуктивного датчика с подпружиненным сердечником, свободный конец которого снабжен ползуном, закрепленным шарнирно.Популярные патенты: 2446688 Композиция для получения растительного организма с улучшенным содержанием сахара и ее применение ... unshiu. В частности, за неделю до предполагаемой даты сбора плодов Citrus unshiu, поверхность листьев ветки с плодами, покрывали 0.5 мМ GSSG. Плоды собирали в предполагаемый срок.Затем в собранных плодах проводили сенсорный тест на содержание сахара. В результате установлено, что в плодах растений, которым вносили GSSG, увеличилось содержание сахара и понизилась кислотность. Далее обнаружено, что у плодов растения, которому вносили GSSG, возрастала масса. Также в полученных плодах определяли содержание сахара с помощью портативного рефрактометра "Pocket" APAL-1 (ATAGO CO., LTD.). Для сравнения в плодах растений, которым не вносили GSSG, также определяли содержание сахара. ... 2265300 Способ борьбы с нежелательной порослью топинамбура ... растений, шт./м2 % гибели или прироста (увеличение +) Обработка почвы после уборки клубнейОбработка гербицидом или скашиваниеСрок обработки (биологич. фаза)Высота растений, см до обработкипосле проявления эффекта, тек. годна следующий год В текущем годуна следующий год 1. Вспашка на глубину от 18 до 22 см Раундап, 5 л/га (360 г глифосата к-ты)В начале образования столонов40-50 6238114 38,7+83,8 Массовый рост столонов80-90 9827135 72,4+37,8 Начало образования клубней (утолщение столонов) 110-12012232 16073,8 +31,12. Культивация на глубину 8-10 см Раундап, 5 л/га (360 г глифосата к-ты)В начале образования столонов40-50 11001,5 10098,6Массовый рост столонов80-90 ... 2115304 Доильный аппарат ... Как только наступит припуск молока и оно из доильных стаканов 4 через коллектор 3 поступит в молочную приставку 6, произойдет заполнение молоком ковша 27. После заполнения ковша 27 молоком, он опрокинется и молоко стечет в молокосборник 5, при этом через тягу 28 поршень 29 поднимется вверх и займет свое крайнее верхнее положение. Отверстие 31 поршня 29 совместится с патрубком 34 поршневой камеры 30 и вакуум из молокосборника 5 проникнет по каналу 35 в патрубок дополнительного пульсатора 2. Это приведет к тому, что клапан 13 займет свое верхнее положение и не будет переключаться, так как доступ воздуха в камеру постоянного атмосферного давления прекратится, поэтому дополнительный ... 2027346 Лесозаготовительная машина ... расположен на горизонтальной поверхности каретки, обращенный к балке, для поочередного взаимодействия с одним из передающих элементов датчиков. 1 з.п. ф-лы, 3 ил. , , ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУ Изобретение относится к лесной промышленности и может быть использовано в лесозаготовительной машине, например в сучкорезно-раскряжевочной. Известна лесозаготовительная машина, включающая балку, на которой смонтированы сучкорезная головка, протаскивающий механизм, выполненный в виде установленной в направляющих каретки с захватом и их приводом в виде гидролебедки, установленный на балке раскряжевочный механизм с приводом его перемещения и механизм отмера длин ... 2146444 Способ выявления и отбора стрессоустойчивых животных ... подвергающие постоянному риску здоровье и благополучие животных в интенсивных и экстенсивных системах животноводства. Установлено, что мотивированные страхом особенности оборонительного реагирования особей при контактах с человеком являются важным фактором регуляции комплекса признаков индивидуальной приспособленности, таких как скорость роста и развития продуктивных качеств, половое созревание и плодовитость, реактивность гипоталамо-гипофизарно-надпочечниковой системы (ГГНС) к стрессорным воздействиям, способность к обучению и послушность у животных разных видов [Bouissou M.F. La relation Homme-Animal // INRA Prod. Anim. 1992. 5:303-318]. Доказано также, что отбор производителей на ... |
Еще из этого раздела: 2098936 Осевой вентилятор 2479996 Экологический комплекс для аквакультуры и рекультивации морских вод 2049387 Инкубатор индивидуального пользования 2261588 Способ электростимуляции жизнедеятельности растений 2453091 Способ обработки почвы 2099929 Почвенная растительная смесь для культурных газонов и способ их создания 2407284 Акустический анализатор роевого состояния пчелосемей 2106081 Животноводческая ферма с применением помещений круглой формы и способ содержания в ней, например, крупного рогатого скота 2242875 Энергосберегающий способ зимовки и содержания пчел на воле в однокорпусном улье усова 2163071 Способ определения потенциальной соленостной толерантности водных беспозвоночных |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||