Способ обработки земли и машина для его осуществленияПатент на изобретение №: 2226326 Автор: Гаджимурадов И.М. Патентообладатель: Гаджимурадов Исин Мевлютович Дата публикации: 27 Мая, 2003 Начало действия патента: 13 Апреля, 2001 Адрес для переписки: 362040, г. Владикавказ, 40-е отд., а/я 63, И.М.Гаджимурадову Изображения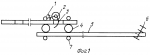 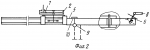  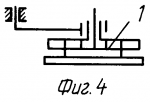 Изобретение относится к сельскому хозяйству и может быть использовано для обработки почвы. Способ включает обработку почвы во влажном состоянии в любое время года рабочими органами, установленными с возможностью колебаний и поворота. Ширину захвата рабочих органов изменяют поворотом линии перемещения рабочих органов. Машина содержит многорежимные рабочие органы для выполнения различных работ. Рабочие органы выполнены в виде бульдозерной лопаты, или рабочих органов для вспашки, или плоскорезов, или лап, или дисков, или ромбовидной формы с лезвиями со всех сторон. Плоскорезы имеют быстросъемные отвальные поверхности для обработки почвы с и без оборота пласта. Такие технология и машина позволяют снизить энергозатраты, повысить эффективность обработки почвы и обеспечить влагосбережение на любых почвах. 2 с. и 5 з.п. ф-лы, 47 ил. Изобретение относится к технологиям земледелия и машинам для их реализации, может быть использовано в качестве прорывного пути решения проблем металло-энерго-ресурсо-технико-почво-влаго и время сбережения.Уровень технологий обработки земли и сельхозмашин характеризуется тем, что производительность машин зависит от проходимости по полю и повышается осушением почвы и повышением силы и скорости массы и стоимости машин. Вспашка укладкой сухой почвы на дно борозды и выворачивание влажного нижнего слоя в теплое время осушает почву, повышает потери энергии ресурса, влаги, времени.Известна машина с рабочими органами - источниками движущей силы (пат. №2073387, 6 А 01 В 9/00) и приводом для их реверсивного перемещения и выполнения различных работ при малой нагрузке колес. Машина совмещает обработку почвы, долив и внесение удобрений. Цель изобретения - повышение эффективности технологий и машины. Сущностью и основой изобретения является то, что почву обрабатывают до осушения при малой твердости и липкости или поливают перед обработкой, липкость и твердость снижаются и готовность к обработке повышается при низкой температуре, осенью, зимой и весной в зависимости от условий зоны. Почву обрабатывают поворотными рабочими органами, сочетая ведущий, тормозной и нейтральный режимы работы, снижают тяговую силу трактора или подталкивают его. Почву обрабатывают в морозе или теплоспелом состоянии поворотными рабочими органами в колебательном режиме при малой силе тяги. Обработку почвы облегчают выбором времени готовности и зимой и амплитуды колебания гидропривода, ходовую часть трактора разгружают и догружают рабочие органы, катки и др. орудия.Почву обрабатывают рабочими органами в поворотно-колебательном режиме. Ширину захвата агрегата изменяют поворотом рабочих органов. Силы тяги в тяговом режиме и силы торможения в тормозном режиме распределяют между бортами с учетом реакций почвы и траектории. Силы тяги смещают вперед, силы торможения назад от центра тяжести.Машина содержит многорежимные рабочие органы для выполнения различных работ до осушения почвы и при малой нагрузке ходовой части. Рабочие органы содержат самовращающиеся ролики для оборота почвы. Рабочие органы установлены на конце рейки, связанной с звездочкой вала отбора мощности. Рабочие органы имеют лезвия со всех сторон для обработки почвы при перемещении вправо и влево относительно энергосредства. Гидропривод поворота оборотных рабочих органов выполнен в виде вибратора для углового колебания рабочих органов. Машина имеет упругодемпфирующие ограничители, допускающие выглубление рабочих органов при перегрузке. Машина имеет ведущие и тормозные рабочие органы для обработки почвы в холодноспелом состоянии или после полива при малой нагрузке ходовой части. Гидроувеличитель сцепного веса имеет режим разгрузки ведущих колес и догрузки дисковых рабочих органов. Рабочие органы для плоскорезной обработки имеют быстросъемные отвальные поверхности с возможностью обработки земли с оборотом и без оборота пласта при низкой или нулевой тяговой силе энергосредства и широкозахватного агрегата. Поворот и колебание рабочих органов совершают одним гидроцилиндром.Широкозахватная экономически и экологически безопасная обработка земли без осушения почвы и нагружения ходовой части облегчает решение многих проблем развития технологий и техники для обработки земли: без дорогостоящих тракторов, высоких скоростей повышается производительность, проходимость, устойчивость, управляемость и безопасность, независимость работы от погоды, влажности и температуры, сезона года и зоны земледелия.Агротехнологию /способ обработки земли/ реализуют тем, что физическую спелость почвы /готовность к обработке/ обеспечивают во влажное, прохладное и холодное время, когда проходимость техники и обрабатываемость почвы достигаются без осушения почвы, снижается твердость и липкость, условия для роста сорняков и испарения влаги.Спелость почвы определяется состоянием влаги, степенью замерзания, внешней температурой и глубиной промерзания, устранением или снижением липкости и выворачивания глыб. Морозоспелую почву можно считать готовой, если глыбы не выворачиваются или очень легко крошатся. Сроки и способ сочетания известных методов вспашки, лущения, боронования и т.д. определяют с учетом зоны, типа почв, толщины снега, возможности запашки ровным слоем почвы, экономично и более эффективно, чем осушением. Критериями оценки являются энерго-влаго-почво-ресурс и время сбережения, защита человека, техники и среды, урожайность и экологическая безопасность.Ввиду того, что известная спелость осушением теряет влагу, посев и посадка требуют увлажнения и подогрева почвы /биологической спелости/; сроки спелости проходят быстро /иногда часами/, влажности и осушение /две крайности/ затрудняют обработку и дообработку глыб, сочетать влажность до подогрева трудно осенью и весной, сочетают в новом способе физическую спелость с холодо /морозоспелостью/ без потерь влаги и тяговой силы переводом рабочих органов из тормозного режима в нетормозной, продлеванием агротехнических сроков. При этом семена сорняков внизу часто теряют всхожесть, глубина и недостаток тепла и воздуха затрудняют их рост, они появляются позже посевной культуры. Свободная вода в виде снега и льда не стекается быстро вниз, таяние задерживается под покровом почвы, задерживает биологическую спелость нижнего слоя почвы. Холод готовит почву к обработке без осушения, влага кристаллизуется, липкость снижается, проходимость техники повышается, трение снижается, появляется явление трения и жидкой смазки в контакте с рабочими органами.В прохладное время улучшаются условия работы человека, двигателя и рабочих органов: запыленность снижается, агросроки продлеваются, солнечная энергия используется более продолжительное время, земля после обработки зимой становится чернее, скважистее и поглощает больше тепла, повышается время фотосинтеза, исключается уход урожая под снег, облегчается получение нескольких урожаев в год. Запашка воды и удобрений снижает потери влаги и удобрений, смыв их водой, облегчает засушливое земледелие, зимовспашка становится альтернативой плоскорезной обработке. В теплой зоне спелость регулируется поливом из борозд - базовых линий автовождения.Снижение нагрузки ходовой части и зависимости движущей силы от влажности почвы облегчает обработку рисового поля, работу в воде, под водой и на склонах.Метод обработки земли в холодоспелом состоянии в зоне сухого земледелия является спасением от засухи и влагообеспечения растений. Он облегчает использование влаги и тепла весной. Малая нагрузка ходовой части снижает уплотнение почвы, силы трения и сцепления между частицами, напряжения и деформация почвы. Это больше соответствует требованиям растений, устраняет противоречивость требований растений и техники к почве (повышение влажности не влияет на проходимость). Это допускает замену режима догрузки ведущих колес массой сельхозмашины режимом разгрузки колес до отрыва их от земли для благоприятного догружения дисковых рабочих органов и повышения эффективности их работы без применения балласта. Независимость проходимости от нагрузки колес устраняет необходимость в большой массе трактора, множестве колес и осей, перевозке балласта, установке сдвоенных и строенных шин, наполнении их водой. Это устраняет зависимость ширины захвата агрегата для выполнения всех работ от тягового сопротивления рабочих органов и числа этих рабочих органов.В графической части на фиг. 1 изображена схема преобразования вращения звездочки в перемещение рейки с рабочими органами, на фиг. 2 - схема привода рабочих органов, вид сверху, на фиг. 3 - схема установки направляющих с некоторым смещением, на фиг. 4 - схема привода с планетарным редуктором, на фиг. 5 - схема рейки, на фиг. 6 - ролики, на фиг. 7 - схема поворота рейки для транспортировки, на фиг. 8 - схема установки дорожек, на фиг. 9 - схема установки диска противосползания, на фиг. 10 - схема направляющих рейки, на фиг. 11 - схема смещения направляющих, на фиг. 12 - схема опоры с диском и колесом, на фиг. 13 - схема перехода звездочки и реверсирования хода рейки, на фиг. 14 - схема гидропривода рейки, на фиг. 15 - схема удлинения рейки, на фиг. 16 - схема поворота рейки, на фиг. 17 - схема изменения хода и люфта, на фиг. 18 - схема установки секций рейки, на фиг. 19 - схема изменения хода при гидроприводе, на фиг. 20 - схема муфты и реверс-редуктора, на фиг. 21 схема регулятора плеча, на фиг. 22 - схема изменения хода гидроцилиндра упорами для поворота и колебания рабочих органов, на фиг. 23 - схема изменения хода и колебания, на фиг. 24 - схема изменения плеча гидроцилиндра, на фиг. 25 - схема оборотного плуга с гидроцилиндром поворота и колебания рабочих органов, на фиг. 26 - схема плуга для образования лунок и колебания рабочих органов, на фиг. 27 - схема механической руки с гидроприводом для перемещения рабочих органов, на фиг. 28 - схема механической руки из локтя и кисти, вид сбоку, на фиг. 29 - схема работы двухрычажной механической руки, на фиг. 30 /а, б/- схема работы роликового рабочего органа для вспашки, на фиг. 31 - схема двухроликового рабочего органа, на фиг. 32 - то же, вид сбоку, на фиг.33 - схема рабочего органа с поворотным крылом, на фиг. 34 - схема рабочего органа, вид сверху, на фиг. 35 - схема плоскореза, на фиг. 36 - схема плоскореза с роликом, на фиг. 37 - схема плоскореза с отвалом, на фиг. 38 - схема перемещения /работы/ плоскорезов, на фиг. 39 - схема рабочего органа, на фиг. 40 - схема, вид сбоку, на фиг. 41 - схема сил и реакций многорежимных дисков, где Р - силы, R - реакции, V - скорости рабочих органов, V - скорость движения вперед, на фиг.42 - схема сил и реакций дисковой батареи, на фиг. 43 - схема перемещения плоскорезов в ведущем, нейтральном и тормозном режимах (лап и ножей для сухого земледелия), на фиг. 44 - схема работы плуга в ведущем режиме, на фиг. 45 - схема перемещения рабочих органов, на фиг. 46 - схема работы бульдозерной лопаты в режимах широкого изменения нагрузки ходовой части, на фиг. 47 - схема изменения скоростей и сил в зависимости от хода l рабочих органов в ведущем, тормозном и нейтральном режимах.Скорость движения агрегата вперед может быть низкой и непрерывно /с ходоуменьшителем/ и периодической /чередованием поперечного и продольного перемещений рабочих органов/.Периодическая подача осуществляется прерыванием движения муфтой, объемной муфтой - насосом гидравлического отбора мощности, планетарным редуктором механизма поворота или планетарным редуктором - датчиком нагрузки, толкателем в виде лопатки или диска по силе конечного упора или его сигналу дополнительным гидроцилиндром, поворотом рычага и тяги для подтягивания сельхозмашины к трактору и т.д. Подача вперед определяется с учетом необходимой повторности выполнения работ может устранить необходимость в тракторе. Привод может быть от автомобиля, колеса энергосредства, электродвигателя и от руки по принципу "тяни - толкай".Адаптивное регулирование скоростей и повторений работ за один проход без дополнительных рабочих органов и с ними, причем ширина захвата в любом случае многократно превышает ширину рабочих органов.Коэффициент повторения работ  l=Ш/П; Sp=Vpt; S01=V l=Ш/П; Sp=Vpt; S01=V t,где Vp, Шр, V, Ш - скорости и ширины захвата рабочих органов и агрегата;Wp, Sp, W, S, - площади обработки и пути рабочих органов и агрегата.Во всех вариантах исполнения скорости больших масс ниже, малых масс выше.Агротехнология и способы выполнения работ реализуются машиной при малой или нулевой тяновой силе энергосредства рабочими органами зимой, весной, летом и осенью без уплотнения почвы.Машина для обработки почвы и грунтов /земли/ имеет механический или гидравлический привод. Механический привод от вала отбора мощности включает редуктор 1 /фиг.1, 2/ с звездочкой 2, дорожкой 3, звездочки 4 привода реек 5 для перемещения рабочих органов 6. Ролики 7, колеса 8, шарнир 9 с замком 10 блокировки допускают работу в поле и компактное сложение на транспорте. Направляющие 11 реек могут быть роликами. Ролики и направляющие 7, 11 передают часть нагрузки боковинам 12 рейки и формируют траекторию движения рабочих органов. Ролики 13 рейки повышают ресурс цевочного зацепления. Машина /фиг. 8-13/ имеет диск или диски 14 противодействия сползанию. Рейки 5 имеют оси 14 между боковинами 15, шпренгеля 16 предохраняют от изгиба и колеса 8 и 17 служат опорами. Вариант гидропривода имеет гидрораспределитель 18 и гидроцилиндры 19, связанные с возможностью эстафетного перемещения рейки с рабочими органами и реверса по сигналу конечного упора /фиг.14/.Для изменения ширины захвата /фиг.15-24/ машина может иметь дополнительные секции или ось 20 поворота, ограничители 21 холостого хода, приставки-секции рейки 5 /фиг.18/, гидромашину с переключателем направления 23 по сигналу упора 23 /фиг. 19/, или муфту 24 переключения шестерен 25 и изменения направления вращения шестерни 26, или регулятор хода поршня гидроцилиндра 27, или регулятор 28 плеча связи рычага с рейкой /фиг. 21-24/. Регулятор 28 /фиг. 23/ может быть в виде дополнительной связи. Трактор 29 /фиг. 25-26/ может тянуть рабочие органы оборотного плуга в тормозном режиме с возможностью поворота и колебания рабочих органов гидроцилиндром. Ход гидроцилиндра /поршня/ регулируется конечными упорами и определяет величину поворота /настройки/ и колебания при малом ходе. Вибратор с гидропитанием может быть иной известной конструкции.Альтернативой реечного привода является механическая рука /фиг. 27-30/, включающая диск 32 противосползания, гидроцилиндры 33 локтевого рычага 34, несколько звеньев цепи 35, звездочку 36 поворота рычага 37 для перемещения рабочих органов 38, механизм навески 39.Рабочие органы для вспашки 40, 41 /фиг. 30/ с одним или двумя поверхностями. Рабочий орган 42 с роликами 43, 44 или крыльями 45, 46 для правого и левого оборота почвы, плоскорез 47 без отвала или с роликами 48, или отвалами 49, 50. Рабочий орган на поворотной оси 51 с ограничителями 52 имеет ромбовидную форму с лезвиями со всех 4-х сторон 53 /фиг. 39, 40/, пунктиром показаны рабочие положения при ходе вправо и влево. Режимы работы рабочих органов с указанием векторов скоростей, сил и реакций /фиг. 41-47/ характеризуют возможности снижения тягового сопротивления и нагрузки ходовой части при выполнении различных работ путем сочетания и совмещения режимов.Машина работает следующим образом. Рейки 5 или рычаги 34, 37 перемещают рабочие органы вправо и влево относительно энергосредства. Самоповорот рабочих органов, самоустановка в конце хода и перемещение до другого конца обеспечивают выполнение ими своих функций и повторение в зависимости от настройки и скорости движения.Оборотный плуг пашет в двух режимах /лево- и правооборачивающими/ настройками или без отвалов - плоскорезами. Гидроцилиндр создает колебания и снижает сопротивление плуга. При установке рабочих органов на поперечной линии снижается длина и поворот рабочих органов дает ряд лунок для задержания влаги и эрозии.Сочетание тормозных и нетормозных рабочих органов возможно для устранения избыточной движущей /толкающей/ силы рабочих органов. Сочетание оборотного плуга с ведущими рабочими органами дает борозду для копирования при следующем проходе. При установке двух рук или реек агрегат уравновешивается без дисков противосползания и ширина захвата удваивается. При этом руки располагаются на некотором удалении от энергосредства, на поворотных рычагах /на фиг. не показаны/ с возможностью остановки в среднем /компактном/ положении.При формировании траектории и режимов работы агрегата из трактора /тягача/ и прицепа в виде технологической машины или транспортного средства энергию между колесами тягача в тяговом и тормозном режимах распределяют с учетом реакций почвы и траектории. Известное допущение различий ускорений нельзя допустить, т.к. нарушает единство агрегата. У единого агрегата различие ускорений, скоростей и путей указывает на относительное перемещение тягача и прицепа /трактора и технологической машины/. Для устранения ошибочного взгляда /подхода/ необходимо исходить из равенства ускорений или сигнал об относительном перемещении /различии ускорений/ ввести как ошибку в механизм управления тормозами так, чтобы устранить эту ошибку. Если тягач и прицеп имеют одинаковые ускорения, то сцепка дает нулевой сигнал. Если толкающая сила /сцепка сжимается/, дает сигнал для снижения толкающей силы или усиления торможения прицепа. В любом случае управления агрегатом облегчается по такому закону: энергию между бортами и колесами нужно распрямлять с учетом их сцепных возможностей и траектории движения в тяговом и тормозном режимах. При управлении тормозами (при избыточной движущей силе) энергию управления нужно распределять между тормозами колес с учетом реакций колес и курса. Для работы агрегата в режиме полуробота эти законы управления реализуются настройкой ограничителями углов установки и сил взаимодействия тягача и рабочих органов. Такое управление элементами агрегата в тяговом и тормозном режимах работы рабочих органов придает устойчивость и подтверждает полезность работы в нейтральном режиме перемещения рабочих органов и качения колес без больших отклонений, что резервирует все силы тяги и торможения тягача, резервирует проходимость и устойчивость движения. Наличие упоров /тормозов обратного хода/ облегчает трогание с места на подъеме, исключает откатывание назад при потере толкающей силы. Такие управляемые упоры-полупроводники движения повышают надежность работы в режиме робота применительно к внешним условиям.Многорежимные энерго-, влаго- и времясберегающие, реверсивные самоповоротные рабочие органы для выполнения различных работ и их повторения за один проход в любой зоне земледелия и других отраслях многократно повышает эффективность производства техники и продукции земледелия. Многорежимные рабочие органы при их перемещении дают слегающие РП и F в поперечной и продольной плоскостях. Симметричное нагружение дисков, их батарей /лущильников/, плоскорезов, ножей, лемехов, отвалов, лап и др. рабочих органов (фиг. 41-47) уравновешивает поперечные слагающие, и агрегат движется устойчиво. Продольные силы и скорости направлены в сторону движения в ведущем режиме и назад в тормозном. При равенстве этих сил или их отсутствии возникает нейтральный режим. Сочетание ведущих и тормозных режимов при поперечном ходе дает разность продольных, направленную в сторону большей силы. Избыток и недостаток движущих сил можно регулировать ограничителями угла поворота настройкой. При реакции почвы в 3-5 кН, углах установки и трения 50-70 градусов произведение реакций на косинус углов толкающая сила 1,5-3 кН составляет почти половину сопротивления.Поперечная сила рычагами легко преобразуется в движущую силу и подачу рабочих органов вперед и без тяговой силы трактора.Соотношение скоростей перемещения рабочих органов легко регулируется и обеспечивает кратность обработки почвы без дополнительных рабочих органов за один проход агрегата по полю. Это и возможность догрузки дисковых рабочих органов массой трактора даже упругой тягой или установкой дисков перед ведущим мостом с возможностью прижатия к земле толкающей силой, аналогично машине фронтальной навески разгружает ведущие колеса и компенсирует избыток движущей силы при выполнении энергоемких работ обработки земли. Колебания рабочих органов по сигналам конечных переключателей хода поршня снижает энергозатраты в любом режиме, а все признаки вместе формируют прорывной путь развития технологий и техники.Такой путь открывает новые возможности для выбора сроков спелости в любое время года в теплой зоне и холодоспелости осенью и весной на севере, так как исключает выворачивание глыб после осушения или глубокого промерзания под покровом снега большой толщины наличие резерва времени в другие периоды.Технико-экономическая эффективность умелого применения новых признаков выбора сроков спелости и техники заключается в улучшении агротехнологий и эксплуатационных качеств техники; проходимости, совместимости операций, повторности выполнения работ без дополнительных рабочих органов и проходов по полю; влаго-, время- и энергосберегаемости, универсальности с учетом сменности рабочих органов; адаптивности к влажности, агрегатируемости и линейности расположения рабочих органов, производительности, самоочищаемости, регулируемости ширины захвата и скорости движения; мобильности, управляемости, устойчивости, плавности хода, защищенности человека, техники и среды. t,где Vp, Шр, V, Ш - скорости и ширины захвата рабочих органов и агрегата;Wp, Sp, W, S, - площади обработки и пути рабочих органов и агрегата.Во всех вариантах исполнения скорости больших масс ниже, малых масс выше.Агротехнология и способы выполнения работ реализуются машиной при малой или нулевой тяновой силе энергосредства рабочими органами зимой, весной, летом и осенью без уплотнения почвы.Машина для обработки почвы и грунтов /земли/ имеет механический или гидравлический привод. Механический привод от вала отбора мощности включает редуктор 1 /фиг.1, 2/ с звездочкой 2, дорожкой 3, звездочки 4 привода реек 5 для перемещения рабочих органов 6. Ролики 7, колеса 8, шарнир 9 с замком 10 блокировки допускают работу в поле и компактное сложение на транспорте. Направляющие 11 реек могут быть роликами. Ролики и направляющие 7, 11 передают часть нагрузки боковинам 12 рейки и формируют траекторию движения рабочих органов. Ролики 13 рейки повышают ресурс цевочного зацепления. Машина /фиг. 8-13/ имеет диск или диски 14 противодействия сползанию. Рейки 5 имеют оси 14 между боковинами 15, шпренгеля 16 предохраняют от изгиба и колеса 8 и 17 служат опорами. Вариант гидропривода имеет гидрораспределитель 18 и гидроцилиндры 19, связанные с возможностью эстафетного перемещения рейки с рабочими органами и реверса по сигналу конечного упора /фиг.14/.Для изменения ширины захвата /фиг.15-24/ машина может иметь дополнительные секции или ось 20 поворота, ограничители 21 холостого хода, приставки-секции рейки 5 /фиг.18/, гидромашину с переключателем направления 23 по сигналу упора 23 /фиг. 19/, или муфту 24 переключения шестерен 25 и изменения направления вращения шестерни 26, или регулятор хода поршня гидроцилиндра 27, или регулятор 28 плеча связи рычага с рейкой /фиг. 21-24/. Регулятор 28 /фиг. 23/ может быть в виде дополнительной связи. Трактор 29 /фиг. 25-26/ может тянуть рабочие органы оборотного плуга в тормозном режиме с возможностью поворота и колебания рабочих органов гидроцилиндром. Ход гидроцилиндра /поршня/ регулируется конечными упорами и определяет величину поворота /настройки/ и колебания при малом ходе. Вибратор с гидропитанием может быть иной известной конструкции.Альтернативой реечного привода является механическая рука /фиг. 27-30/, включающая диск 32 противосползания, гидроцилиндры 33 локтевого рычага 34, несколько звеньев цепи 35, звездочку 36 поворота рычага 37 для перемещения рабочих органов 38, механизм навески 39.Рабочие органы для вспашки 40, 41 /фиг. 30/ с одним или двумя поверхностями. Рабочий орган 42 с роликами 43, 44 или крыльями 45, 46 для правого и левого оборота почвы, плоскорез 47 без отвала или с роликами 48, или отвалами 49, 50. Рабочий орган на поворотной оси 51 с ограничителями 52 имеет ромбовидную форму с лезвиями со всех 4-х сторон 53 /фиг. 39, 40/, пунктиром показаны рабочие положения при ходе вправо и влево. Режимы работы рабочих органов с указанием векторов скоростей, сил и реакций /фиг. 41-47/ характеризуют возможности снижения тягового сопротивления и нагрузки ходовой части при выполнении различных работ путем сочетания и совмещения режимов.Машина работает следующим образом. Рейки 5 или рычаги 34, 37 перемещают рабочие органы вправо и влево относительно энергосредства. Самоповорот рабочих органов, самоустановка в конце хода и перемещение до другого конца обеспечивают выполнение ими своих функций и повторение в зависимости от настройки и скорости движения.Оборотный плуг пашет в двух режимах /лево- и правооборачивающими/ настройками или без отвалов - плоскорезами. Гидроцилиндр создает колебания и снижает сопротивление плуга. При установке рабочих органов на поперечной линии снижается длина и поворот рабочих органов дает ряд лунок для задержания влаги и эрозии.Сочетание тормозных и нетормозных рабочих органов возможно для устранения избыточной движущей /толкающей/ силы рабочих органов. Сочетание оборотного плуга с ведущими рабочими органами дает борозду для копирования при следующем проходе. При установке двух рук или реек агрегат уравновешивается без дисков противосползания и ширина захвата удваивается. При этом руки располагаются на некотором удалении от энергосредства, на поворотных рычагах /на фиг. не показаны/ с возможностью остановки в среднем /компактном/ положении.При формировании траектории и режимов работы агрегата из трактора /тягача/ и прицепа в виде технологической машины или транспортного средства энергию между колесами тягача в тяговом и тормозном режимах распределяют с учетом реакций почвы и траектории. Известное допущение различий ускорений нельзя допустить, т.к. нарушает единство агрегата. У единого агрегата различие ускорений, скоростей и путей указывает на относительное перемещение тягача и прицепа /трактора и технологической машины/. Для устранения ошибочного взгляда /подхода/ необходимо исходить из равенства ускорений или сигнал об относительном перемещении /различии ускорений/ ввести как ошибку в механизм управления тормозами так, чтобы устранить эту ошибку. Если тягач и прицеп имеют одинаковые ускорения, то сцепка дает нулевой сигнал. Если толкающая сила /сцепка сжимается/, дает сигнал для снижения толкающей силы или усиления торможения прицепа. В любом случае управления агрегатом облегчается по такому закону: энергию между бортами и колесами нужно распрямлять с учетом их сцепных возможностей и траектории движения в тяговом и тормозном режимах. При управлении тормозами (при избыточной движущей силе) энергию управления нужно распределять между тормозами колес с учетом реакций колес и курса. Для работы агрегата в режиме полуробота эти законы управления реализуются настройкой ограничителями углов установки и сил взаимодействия тягача и рабочих органов. Такое управление элементами агрегата в тяговом и тормозном режимах работы рабочих органов придает устойчивость и подтверждает полезность работы в нейтральном режиме перемещения рабочих органов и качения колес без больших отклонений, что резервирует все силы тяги и торможения тягача, резервирует проходимость и устойчивость движения. Наличие упоров /тормозов обратного хода/ облегчает трогание с места на подъеме, исключает откатывание назад при потере толкающей силы. Такие управляемые упоры-полупроводники движения повышают надежность работы в режиме робота применительно к внешним условиям.Многорежимные энерго-, влаго- и времясберегающие, реверсивные самоповоротные рабочие органы для выполнения различных работ и их повторения за один проход в любой зоне земледелия и других отраслях многократно повышает эффективность производства техники и продукции земледелия. Многорежимные рабочие органы при их перемещении дают слегающие РП и F в поперечной и продольной плоскостях. Симметричное нагружение дисков, их батарей /лущильников/, плоскорезов, ножей, лемехов, отвалов, лап и др. рабочих органов (фиг. 41-47) уравновешивает поперечные слагающие, и агрегат движется устойчиво. Продольные силы и скорости направлены в сторону движения в ведущем режиме и назад в тормозном. При равенстве этих сил или их отсутствии возникает нейтральный режим. Сочетание ведущих и тормозных режимов при поперечном ходе дает разность продольных, направленную в сторону большей силы. Избыток и недостаток движущих сил можно регулировать ограничителями угла поворота настройкой. При реакции почвы в 3-5 кН, углах установки и трения 50-70 градусов произведение реакций на косинус углов толкающая сила 1,5-3 кН составляет почти половину сопротивления.Поперечная сила рычагами легко преобразуется в движущую силу и подачу рабочих органов вперед и без тяговой силы трактора.Соотношение скоростей перемещения рабочих органов легко регулируется и обеспечивает кратность обработки почвы без дополнительных рабочих органов за один проход агрегата по полю. Это и возможность догрузки дисковых рабочих органов массой трактора даже упругой тягой или установкой дисков перед ведущим мостом с возможностью прижатия к земле толкающей силой, аналогично машине фронтальной навески разгружает ведущие колеса и компенсирует избыток движущей силы при выполнении энергоемких работ обработки земли. Колебания рабочих органов по сигналам конечных переключателей хода поршня снижает энергозатраты в любом режиме, а все признаки вместе формируют прорывной путь развития технологий и техники.Такой путь открывает новые возможности для выбора сроков спелости в любое время года в теплой зоне и холодоспелости осенью и весной на севере, так как исключает выворачивание глыб после осушения или глубокого промерзания под покровом снега большой толщины наличие резерва времени в другие периоды.Технико-экономическая эффективность умелого применения новых признаков выбора сроков спелости и техники заключается в улучшении агротехнологий и эксплуатационных качеств техники; проходимости, совместимости операций, повторности выполнения работ без дополнительных рабочих органов и проходов по полю; влаго-, время- и энергосберегаемости, универсальности с учетом сменности рабочих органов; адаптивности к влажности, агрегатируемости и линейности расположения рабочих органов, производительности, самоочищаемости, регулируемости ширины захвата и скорости движения; мобильности, управляемости, устойчивости, плавности хода, защищенности человека, техники и среды.
Формула изобретения1. Способ обработки земли, включающий ее обработку рабочими органами, установленными с возможностью поворота, отличающийся тем, что обработку земли осуществляют во влажном состоянии в любое время года рабочими органами, установленными и с возможностью колебаний, при этом рабочие органы выполнены в виде бульдозерной лопаты, или рабочих органов для вспашки, или плоскорезов, или лап, или дисков, или рабочих органов ромбовидной формы с лезвиями со всех сторон.2. Способ по п.1, отличающийся тем, что обработку земли осуществляют рабочими органами в ведущем, нейтральном и тормозном режимах для снижения тяговой силы или подталкивания энергосредства.3. Способ по любому из пп.1 и 2, отличающийся тем, что ширину захвата при обработке изменяют поворотом линии перемещения рабочих органов.4. Машина для обработки земли, содержащая энергосредство, рабочие органы и привод их перемещения, отличающаяся тем, что машина имеет гидропривод в виде вибратора для поворота и колебаний рабочих органов, при этом последние выполнены в виде бульдозерной лопаты или рабочих органов для вспашки или плоскорезов, или лап, или дисков, или рабочих органов ромбовидной формы с лезвиями со всех сторон.5. Машина по п.4, отличающаяся тем, что она имеет упругодемпфирующие ограничители для выглубления рабочих органов при перегрузке.6. Машина по п.4, отличающаяся тем, что плоскорезы имеют быстросъемные отвальные поверхности для обработки почвы с и без оборота пласта.7. Машина по п.4, отличающаяся тем, что она имеет оборотные рабочие органы, а гидропривод поворота и колебаний рабочих органов имеет гидроцилиндр.QA4A Сведения о заявлении обладателя патента Российской Федерации на изобретение о предоставлении любому лицу права на использование изобретения (открытая лицензия) Номер и год публикации бюллетеня: 16-2004 Номер и год публикации бюллетеня: 15-2003 (73) Патентообладатель: Гаджимурадов Исин Мевлютович Адрес для переписки: 362040, г. Владикавказ, РСО-А, а/я 63 Извещение опубликовано: 10.06.2004 Популярные патенты: 2113779 Агромост ... этом дозировочные бункеры 3 и 4 должны быть закреплены на ферме 1 под большим накопительным бункером 2, и снимаемая продукция попадает в них через транспортеры 55, наклонные лотки 56 и разгрузочные окна 5 и 6 накопительного бункера 2. При уборке таких культур как, например, картофель или свекла на платформы 24 сначала закрепляют ботвоуборочные или листоуборочные сельхозорудия 25, которые ботву или свекольные листья срезают, измельчают и через транспортеры 18 и бункеры направляют в кузова транспортных машин. После этого платформы 24 с использованными сельхозорудиями 25 снимают и заменяют платформами 24 с корнеизвлекающими сельхозорудиями 25. После прохождения всей длины агроугодья ... 2381650 Синергические фунгицидные комбинации биологически активных веществ и их применение для борьбы с нежелательными фитопатогенными грибами ... эмульгатора и разбавляют концентрат водой до необходимой концентрации. Для испытания защитной активности молодые растения инокулируют суспензией конидий Puccinia recondita. Растения оставляют на 48 часов в инкубационной кабине при температуре около 20°С и относительной влажности 100%.В заключение растения обрабатывают указанным расходным количеством препарата биологически активного вещества.Растения помещают в теплицу при температуре около 20°С и относительной влажности воздуха около 80%, для того чтобы создать благоприятные условия для развития пустул ржавчины.Спустя 8 дней после инокуляции происходит оценка. При этом 0% означает эффективность, которая соответствует ... 2142331 Устройство для гомогенизации и гомогенизирующая головка ... выходу, либо подключение трубопровода 2 к возвратному трубопроводу 13, через который продукт возвращается в приемную емкость (не показана). Гомогенизирующая головка 9 (в приведенном на фиг.2 конструктивном исполнении) содержит корпус 14 с внутренней цилиндрической камерой, в которой размещен узел диспергирования, состоящий из щелевого сопла 15, сопряженного с входным патрубком 8, и упругую пластину 16 с заостренной кромкой, закрепленную в корпусе 14 с возможностью перемещения. Щелевое сопло 15 гайкой 17 через герметизирующую прокладку 18 прижимается к торцу корпуса 14. Упругая пластина 16 с помощью винта 19 крепится к механизму перемещения, который содержит стержень 20 с ... 2496298 Узел крепления пальцев подборщика ... два соосных в обоих бортах скоб отверстия, а также внутри обеих пружин пальца, касательно их витков, при этом плоская монтажная петля сдвоенного пружинного подбирающего пальца, обращенная в сторону против направления движения полотна, соединяющая две пружины пальца, в своей средней части выполнена в форме прямой, с переходом от обеих пружин к ней по радиусу, в 2-5 раз большему, чем диаметр проволоки пальца. Скоба по ходу ее движения в работе имеет в задней кромке основания две продольные прорези по ходу транспортера на длину, равную 3-5 диаметрам проволоки пальца. Средняя часть основания скобы между прорезями поднята изгибом над двумя боковыми частями основания на величину, ... 2444885 Посевной агрегат ... две крайние посевные секции, при этом на центральной и крайних посевных секциях установлены сошники, отличающийся тем, что центральная посевная секция связана с рамой через двуплечий рычаг, присоединенный к центральной посевной секции посредством цилиндрического шарнира, ось вращения которого расположена в плоскости, параллельной поперечно-вертикальной плоскости посевного агрегата, и связанный с рамой при помощи цилиндрического шарнира, ось вращения которого расположена в плоскости, параллельной поперечно-вертикальной плоскости посевного ... |
Еще из этого раздела: 2189736 Способ отбора гибридов кукурузы, устойчивых к засухе и стеблевым гнилям 2144756 Селекционная сеялка для посева семян в кассеты 2062564 Способ оценки устойчивости растений к засухе северного и южного типа на ранних этапах онтогенеза 2154931 Корнеуборочная машина 2304875 Способ активации воды для полива при выращивании растений и устройство для его осуществления 2405306 Способ определения содержания крахмала по содержанию глюкозы с учетом индивидуального коэффициента пересчета в растительном материале 2303347 Способ ведения виноградных кустов 2015654 Теплица для подземной выработки 2264075 Рулонный пресс-подборщик лубяных культур 2192721 Орудие для обработки засоленных почв |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||