Способ управления почвообрабатывающим агрегатом и устройство для его осуществленияПатент на изобретение №: 2090992 Автор: Гаджимурадов Исин Мевлютович Патентообладатель: Гаджимурадов Исин Мевлютович Дата публикации: 27 Сентября, 1997 Адрес для переписки: подача заявки30.06.1992 публикация патента27.09.1997 Изображения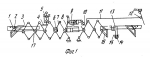 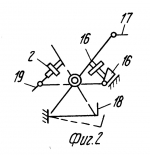 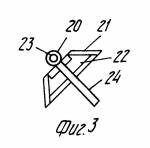 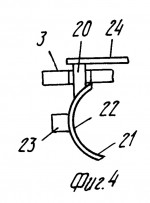 Использование: изобретение относится к сельскохозяйственному машиностроению и может быть использовано в машинах для обработки почвы без тяжелого трактора. Сущность изобретения: Способ управления почвообрабатывающим агрегатом включает перемещение рабочих органов относительно трактора в поперечном направлении и их поворот в конце каждого хода. Скорость движения агрегата увеличивают пропорционально изменяемой ширине захвата рабочего органа. Устройство для управления агрегатом включает механизм перемещения поворота рабочих органов вокруг подвижных осей для реверсивного хода. Механизм перемещения рабочих органов относительно трактора поперечно к направлению его поступательного перемещения имеет регулятор ширины захвата агрегата, который выполнен в виде ограничителя перемещения рабочих органов. 2 с. и 5 з. п. ф-лы, 5 ил. , , , , ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУИзобретение относится к способу управления агрегатом и устройству для его осуществления при обработке почвы и выполнении других работ экологически безопасным, материало-, энерго- и ресурсосберегающим средством. Известны способ и устройство управления агрегатом при обработке почвы [1] в которых перемещение рабочего органа относительно трактора и его поворот в конце каждого хода формирует движущую силу для движения агрегата без перегрузки его ходовой части. Агрегат имеет рабочие органы реверсивного хода и механизм их перемещения относительно трактора в направлении, поперечном к направлению их поступательного перемещения, а также механизм поворота рабочих органов их подвижных осей в пределах, определяемых ограничителями. Реверсивное перемещение рабочих органов без выглубления из почвы согласовано с движением агрегата. Недостатком известного способа управления и устройства для его осуществления является постоянство ширины захвата агрегата и его рабочих органов, что затрудняет регулирование нагрузки по мощности двигателя и адаптивное изменение ширины захвата агрегата по условиям работы. Целью изобретения является повышение эффективности и надежности работы в различных условиях широкое регулирование нагрузки и ширины захвата изменением ширины захвата и длины хода рабочего органа. Основой изобретения является установление и применение нового принципа адаптивного регулирования параметров и режимов работы агрегата для повышения уровня механизации и роботизации земледелия. Способ управления агрегатом реализуется новым принципом регулирования нагрузки и скорости движения агрегата поворотом рабочего органа, а также длины хода его ширины захвата агрегата. Скорость движения рабочего органа при обработке почвы изменяют пропорционально углам его установки и крутизны склона, при обороте почвы вниз по склону скорость снижают, а вверх повышают. Механизм перемещения рабочих органов относительно трактора имеет регулятор ширины захвата агрегата, выполненных в виде регулируемого ограничителя перемещения рабочих органов. Рабочие органы установлены на брусьях с вертикальными шарнирами для крепления пружинных корпусов (рабочих органов) и ограничителями их поворота и связаны с механизмом перемещения одновременно в противоположных направлениях с возможностью уравновешивания сил и сопротивлений в поперечной плоскости и суммирования движущих сил при почвообработке без перегрузки ходовой части трактора. Брус рабочих органов содержит механизм регулирования углов поворота плужного корпуса. Агрегат содержит копир ограничителя реверсивного перемещения брусьев и конечный переключатель. Секции рабочих органов и их брусья имеют регуляторы ширины захвата рабочего органа. Регулируя поворот и перемещение рабочих органов, изменяют скорость движения, нагрузку двигателя и ширину захвата агрегата с учетом производственной необходимости и по сигналу ограничителя хода. Ширина захвата агрегата регулируется по сигналу копира конечного переключателя без изменения нагрузки двигателя. Независимость ширины захвата агрегата от мощности двигателя расширяет функциональные возможности. Основой реализации способа управления агрегатом и действия устройства для его осуществления является новая техническая теория снижения скорости движения, массы агрегата, числа проходов по полю и отрицательного воздействия на почву, ресурс, урожай и плодородие, производительность и надежность работы в режиме робота. Скорость движения агрегата V связана со скоростью перемещения рабочего органа V1, шириной захвата Ш и длиной хода l рабочего органа закономерной зависимостью: V V1Ш/2l. Для повышения качества работы рабочий орган для обработки используют в качестве регулятора нагрузки двигателя без выглубления. Скорость и ширину захвата рабочего органа используют в качестве параметра изменения функций. Изменением угла установки рабочего органа и воздействия на почву или другой материал корректируют или изменяют технологический процесс и функции агрегата. Скорость и длину поперечного хода рабочего органа снижают при встрече с препятствием, а эксплуатационную ширину захвата агрегата изменяют конечным выключателем. В качестве регулятора нагрузки, угла установки рабочего органа и регулятора скорости движения агрегата используют ограничители поворота, допускающие управление на ходу. На поперечном склоне борозду используют в качестве упора против сползания агрегата. Секции рабочих органов на брусьях с шарнирами копируют поверхность и допускают складывание их для транспортировки. Эти свойства и признаки способа и устройства открывают новые пути роботизации земледелия и повышения эффективности технологий и техники. В графической части на фиг. 1 изображена схема перемещения и поворота рабочего органа без выглубления, на фиг. 2 схема регулирования угла установки рабочего органа,на фиг. 3 схема рабочего органа с упором, вид сверху, на фиг. 4 схема рабочего органа, вид сбоку, на фиг. 5 схема привода рабочих органов одного борта. Устройство для реализации способа включает рабочие органы 1 (фиг. 1), ограничители 2 их поворота на брусьях 3 секций, установленных подвижно относительно рамы 4 с опорным колесом 5, регулятор 6 скорости в виде пальца соединения со звеньями 7 пантографов, приводимых гироцилиндром 8, управляемым гидрораспределителем 9 конечным переключателем 10 от одной секции или тягой 11 копира 12 ограничителя поперечного хода. Секции соединены шарнирами 13 для копирования поля, шарнирами 14 для сложения секций и фиксаторами 15 секций в транспортном положении. Привод может быть другим. Ограничители 2 (фиг. 2) в виде упоров или болтов установлены около рычага 16 с возможностью изменения угла поворота рабочего органа тягой 17 или сопротивлением почвы в пределах, установленных упорами и зацепом 18 на упругой пластине для принудительного поворота корпуса в конце поперечного хода в пределах, установленных регулятором 19. Рабочие органы оси 20 (фиг. 3 и 4) поворота, лемехи 21 с трех сторон отвала 22 и упор 23 или иной механизм принудительного поворота. В широкозахватном агрегате секции 24 рабочих органов (фиг. 5) могут перемещаться цепью, рейкой цевочного зацепления 25 и гидромотором 26 со звездочкой 27 на валу с возможностью реверса рейки 28 переключателем 9 линии гидросистемы по сигналу копиров 12 ограничителей. Агрегат может корпусом 29 провести борозду по краю прохода энергосредства 30. Орудие 31 имеет дорожку 32 для качения роликов 33 с роликами 34 и колеса 5, 35, копирующие поле. Привод может быть электрическим. Рабочие органы 1 из одного или нескольких корпусов могут поворачиваться между ограничителями 2 и перемещаться с брусьями 3. Угол поворота можно изменить ограничителями, регулировать регулятором 19 в виде рычага или гидроцилиндра. Симметричные рабочие органы могут пахать при движении в любую сторону без выглубления. Поворачивать рабочие органы можно упором 23 или зацепом 18, а тягами 17 можно синхронизировать поворот всех рабочих органов агрегата. В рабочее и транспортное положение переводится известным путем. Если тяга 17 гибкая, то возврат рабочих органов после поворота и перемещения до крайнего положения происходит пружиной, а жесткая тяга 17 не требует установки пружин и поворачивает рабочие органы в обе стороны. Поперечное перемещение секций возможно в противофазе, при этом секции одного борта связаны и передают силу, т.е. являются приводами для других секций и носителями своих рабочих органов. При реализации способа устройство работает следующим образом. Рабочие органы заглубляют в почву, включается гидропривод или иной механизм, сообщается рабочим органам 1 и брусьям 3 движение. В конце поперечного хода рабочие органы без выглубления поворачиваются и перемещаются в обратном направлении. Почва оборачивается и формируется движущая сила. Пределы перемещения и поворота рабочих органов регулируются перестановкой ограничителей и копиров. Боковые силы секции бортов уравновешиваются за счет перемещения их в противофазе. Различие боковых сил на склоне компенсируется бороздой и колесом. Поэтому поступательное движение вперед стабилизируется на различных склонах. Перемещение рабочих органов зацепом 19 рамы преобразуется в поворот рабочих органов, причем тяга 17 соединяет рычаги и передает поворот (поворачивающий момент) другим рабочим органам. Чем выше влажность почвы, тем с большей скоростью перемещают рабочие органы. Для регулирования скорости рабочие органы присоединяются к различным пантографам. Низкая скорость и ход первого пантографа увеличивается в два раза вторым пантографом, в три раза третьим и так далее. Секции рабочих органов перемещаются до контакта с копиром - переключателем 12 гидрораспределителя 9. Переключение гидролиний вызывает реверсирование привода (гидроцилиндра или мотора) и секции перемещаются до другого конца, где эти процессы повторяются при поступательном движении агрегата и поперечном ходе рабочих органов. Продольное движение рабочих органов возможно в период поворота их на ширину захвата. Это дает односледовую обработку. Если продольное движение непрерывно, то обработка частично повторяется и размеры комков снижаются. Способ обработки определяется с учетом условий местности. В момент поворота рабочих органов по сигналу конечного переключателя копира 12 агрегат можно перемещать на ширину захвата рабочего органа при минимальном сопротивлении. Нагрузку двигателя регулируют изменением угла поворота рабочих органов: чем больше угол установки корпуса, тем больше нагрузка и скорость движения агрегата. При малом угле установки сопротивление и нагрузка снижаются. Угол установки регулируют в пределах 20 45o. Пропорционально углу увеличивают скорость поступательного движения. В зависимости от влажности регулируют скорость поперечного и продольного движения. Переставляя копир 12 по ширине определяют место реверса рабочих органов, что формирует и ширину захвата агрегата. При встрече с препятствием (деревом, камнем) копир ограничивает ход. В эксплуатационных условиях ширина захвата агрегата ограничивается при выполнении последнего перехода и обработке малоразмерных участков неудобиц. На склоне борозда-дорожка повышает курсовую устойчивость. При использовании объекта холостой ход снижается путем поворота рабочих органов в почве, без выглубления. Металлоемкость снижается путем совмещения функций бруса, носителя рабочих органов и их привода, а также возможности изготовления бруса из легкого материала, например из дерева. Увеличение движущей силы и тягового потенциала трактора стимулирует снижение его массы и переход к многооперационным технологиям. Снижение тяговых функций колес трактора допускает применение узких колес и колеи, что снижает потери урожая. Водитель при малой нагрузке и скорости, большой ширине захвата и копировании борозды, уверенный в безопасности, больше сосредотачивает внимание на проводимой технологической операции, что позволяет повысить качество. Независимость скорости от нагрузки и буксования колес способствует усилению внимания контроля качества техпроцесса.ФОРМУЛА ИЗОБРЕТЕНИЯ1. Способ управления почвообрабатывающим агрегатом, включающий перемещение рабочего органа относительно трактора и поворот в конце каждого хода, отличающийся тем, что скорость движения агрегата согласовывают с шириной захвата рабочего органа, при этом скорость повышают пропорционально ширине захвата рабочего органа реверсивного хода. 2. Способ по п.1, отличающийся тем, что скорость движения рабочего органа изменяют пропорционально углу его установки. 3. Устройство для управления почвообрабатывающим агрегатом, включающее рабочие органы и механизм перемещения этих рабочих органов относительно трактора в направлении, поперечном к направлению их поступательного перемещения, а также механизм поворота рабочих органов вокруг их подвижных осей для реверсивного хода, отличающееся тем, что механизм перемещения рабочих органов относительно трактора имеет регулятор ширины захвата агрегата, причем регулятор ширины захвата агрегата выполнен в виде регулируемого ограничителя перемещения рабочих органов. 4. Устройство по п.3, отличающееся тем, что рабочие органы установлены на брусьях с вертикальными шарнирами для крепления плужных корпусов и ограничителями угла их поворота и связаны с механизмом перемещения одновременно в противоположных направлениях с возможностью уравновешивания сил в поперечной плоскости и суммирования движущих сил при почвообработке без перегрузки ходовой части трактора. 5. Устройство по п.4, отличающееся тем, что брус рабочих органов содержит механизм регулирования углов поворота плужных корпусов. 6. Устройство по п.4, отличающееся тем, что оно содержит копир ограничителя реверсивного перемещения брусьев и конечный переключатель. 7. Устройство по п.4, отличающееся тем, что секции рабочих органов и их брусья имеют регуляторы ширины захвата рабочего органа.Популярные патенты: 2124820 Устройство для изменения объемного заряда в атмосфере ... пояснения относительно явлений атмосферного и земного электричества, опишем работу предлагаемого устройства. Условно весь цикл работы устройства для изменения объемного заряда в атмосфере можно разделить на следующие этапы: - приведение устройства в состояние рабочего функционирования; - изменение объемного заряда в атмосфере, т. е. осуществление воздействия на атмосферные образования; - выведение устройства из состояния рабочего функционирования. Приведение устройства в состояние рабочего функционирования осуществляется следующим образом. В исходном состоянии предлагаемое устройство смонтировано, аэростаты 27 (фиг. 1) наполнены газом и прикреплены тросами 28 к металлическому ... 2048767 Способ отбора самок норок для воспроизводства ... барана (Густов А. В. Клинико-иммунологическая характеристика нарушений мозгового кровообращения: Автореферат дис. канд. мед. наук, М. 1971, с.18). Определение количества гемоглобина проводят по Г.В.Дервизу и А.И.Воробьеву в модификации Х.О.Григорьевой и Н.Н.Каценельсон (Берестов В.А. Биохимия и морфология крови пушных зверей, Петрозаводск, 1971, с. 249-253). Общий белок сыворотки крови определяют рефрактометрическим методом (Берестов В.А.Биохимия и морфология крови пушных зверей. Петрозаводск, 1971, с. 201-206). Затем на основе полученных данных методом статистической обработки исчисляют среднестатистические показатели отдельных факториальных признаков. В дальнейшем ... 2248687 Способ весеннего боронования озимых культур и зубовая борона для его осуществления ... средние части боковых поверхностей которой выполнены вогнутыми, так, что суммарный угол атаки снижается с 90° до 30-40°, причем конец рабочей части может быть выполнен загнутым. К недостаткам известного зуба следует отнести нереверсивность, т.е. зуб нельзя использовать для мелкой обработки всходов.Известно изобретение "Зуб бороны" (а.с. № 931123, МПК3 А 01 В 23/02, опубл. 30.05.82 г. в бюл. № 20), содержащий монтажную часть, стержневую часть и рабочую часть в виде пирамиды с продольно-вертикальной пластиной, имеющей криволинейную переднюю и скошенную нижнюю кромки, причем касательная к передней кромке образует с нижней кромкой острый угол. Выполнение этого ... 2189708 Машина для формирования гребней ... периода проводится междурядная обработка почвы с окучиванием - формированием гребней. Ранний и поздний сроки проведения операций нежелательны, особенно в годы с холодной весной, что ведет к изреживанию всходов и уменьшению количества стеблей в кусте, отрицательно сказывается на урожайности культуры. При оптимальных климатических условиях машиной проводится одноразовая обработка междурядий с одновременным формированием гребней. Перед тем, как выехать в поле, навесным устройством 2 машину присоединяют к трактору, затем карданным валом 5 ВОМ соединяют с центральным редуктором 4 и переводят в транспортное положение. В поле машину опускают в рабочее положение, располагая секции ... 2218755 Способ длительного клонирования пайзы (echinochloa frumentacea link) ... удаления от поверхности среды располагаются опушенные ткани. На поверхности каллусов находятся белые компактные, а также полупрозрачные рыхлые ткани с зачатками регенерирующих побегов. На свежие среды переносят участки каллусов с компактными (можно без них) и регенерирующими тканями. При этом на границе со средой формируется прослойка пролиферирующей недифференцированной ткани. Находящиеся на поверхности эксплантов белые компактные ткани подвергаются дедифференциации. Также частичной дедифференциации подвергаются и регенерирующие ткани. Через 30-40 суток после помещения эксплантов на свежие среды вновь сформировавшиеся каллусы делятся на 4 типа. А. Каллусы с недифференцированной ... |
Еще из этого раздела: 2059362 Установка для выращивания мидий 2437864 Способ микробиологической переработки птичьего помета 2253227 Устройство для регулирования температуры в улье 2127511 Композиция пленочного полимерного материала для покрытия теплиц и оптический активатор для полимерного материала (варианты) 2247490 Способ освоения закустаренных земель и устройство для его осуществления 2243658 Способ повышения урожайности картофеля и томатов 2465761 Способ повышения плодородия песчаных почв 2154296 Зерноуборочная машина, преимущественно зерноуборочный комбайн, с мультипроцессорным управляющим устройством 2415552 Питатель молотилки зерноуборочного комбайна 2192721 Орудие для обработки засоленных почв |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||