Тренажер для выработки навыков вычесывания пуха у животныхПатент на изобретение №: 2086119 Автор: Поздняков В.Д., Карташов Л.П., Лапин Ю.Г., Маленков А.М. Патентообладатель: Оренбургская государственная сельскохозяйственная академия Дата публикации: 10 Августа, 1997 Адрес для переписки: подача заявки03.02.1995 публикация патента10.08.1997 Изображения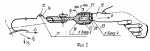 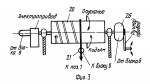 Использование: сельское хозяйство и педагогика, относится в частности к обучающим устройствам, для подготовки специалистов животноводов - чесальщиков пуха у животных. Сущность изобретения. Тренажер состоит из объемной модели 1 животного с датчиками 2 контроля технических и технологических параметров, в частности давления и последовательности проходов имитатора чесального гребня 11, и системы контроля и управления, включающей блок питания 3, блок допуска 4, блок сравнения 7, сумматор 8, многоканальный блок выбора программы обучения 9 и блок индикации 10. При этом тренажер содержит также датчики контроля положений 22, 25 конечностей муляжа животного, трособлочный механизм 20 подъема краниальной части муляжа, поворотный фиксатор задних конечностей и подвижную опору его передних конечностей. Правильность вхождения активной части зубьев имитатора чесального гребня в шерстный покров муляжа животного и контроль развиваемого чесальщиков усилия обеспечивается инерционными и тензометрическими датчиками 12, 13, установленными на зубьях имитатора чесального гребня и в его основании 16, а также регулируемым предохранительным устройством 27. При срабатывании последнего происходит отклонение всех систем тренажера и повторный цикл обучения возможен только после соответствующей команды, поступающей от блока доступа 4. При снятии контрольно-измерительных и информационных систем тренажер может быть использован как обычный, соответствующий всем требованиям организации труда, станок для чески животных. Лабораторные и производственные испытания основных функциональных элементов тренажера доказали их работоспособность и техническое совершенство и подтвердили возможность приближения процесса обучения на тренажер к естественному процессу деятельности чесальщика пуха животных. 3 з.п. ф-лы, 3 ил. , ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУИзобретение относится к сельскому хозяйству, к животноводству и может быть использовано в процессе подготовки специалистов-чесальщиков пуха у животных. Цель изобретения создание устройства, позволяющего сформировать у обучаемых профессиональные навыки вычесывания пуха у животных, в частности у коз, и научить учащихся действовать в условиях реального трудового процесса по выполнению обязательных операций и приемов чески животных. Известны тренажеры для подготовки высококвалифицированных специалистов в родственной отрасли животноводства овцеводстве. Так тренажер (1) для обучения слесарей-заточников обеспечивает контроль технологических и технических параметров процесса заточки режущих пар, например ножей, гребенок к разным типам машин, как для снятия шерсти (волоса) у животных, так и для стрижки людей. Он состоит из точильного агрегата ДАС-350 (ТА-350), специальной державки с датчиками контроля угловых и линейных перемещений затачиваемой детали относительно диска и датчика контроля усилия прижатия обрабатываемого элемента к точильному диску, а также из приспособления для контроля, технического состояния рабочей поверхности наличия параллельности, биении, собственно самого диска и блока информаций с указателем допущенных ошибок. Известный комплексный тренажер для обучения стригалей (2, 3), наиболее близкий по своей конструкции и выбранный поэтому за прототип предлагаемого, включает в себя механо-пневмо-электрическую модель овцы с системой датчиков контроля положений и последовательности проходов, имитатор стригальной машинки, программное устройство, блок контроля управления, блок сравнения, сумматор, блок индикации. Существенным недостатком известного тренажера является его узкопрофильное функциональное назначение, что не позволяет достичь поставленной цели изобретения. На фиг. 1 представлен общий вид тренажера для выработки навыков вычесывания пуха у животных; на фиг. 2 общий вид имитатора рабочего инструмента, в частности чесального гребня; на фиг. 3 электрическая схема системы управления подъемом краниальной части муляжа тела животного. Данный тренажер (фиг. 1) состоит из объемной модели (муляжа) тела животного, например козы, с группой датчиков 2 контроля давления и последовательности проходов имитатора рабочего инструмента, в частности гребня относительно поверхности муляжа при расчесывании, основной ческе и контрольном дочесывании, системы контроля и управления, включающей в себя блок питания 3, блок допуска 4, программный блок 5, блок формирования сигналов 6, блок сравнения текущей и исходной информации 7, сумматор 8, блок выбора программы обучения 9 и блок индикации 10 (блок отображения информации), имитатор рабочего инструмента, например гребня 11, с инертными тензометрическими датчиками 12 и 13, установленными соответственно в накопителе 14 и в основании имитатора рабочего органа 16 (фиг. 2), электрических связей 17, 18, 29, основания тренажера 19, трособлочного механизма подъема 20 кранильной части муляжа 1 с датчиком контроля предельно допустимого усилия натяжения троса 21, датчиков контроля положения задних 22 и передних конечностей 25, поворотного фиксатора положения задних конечностей 23, подвижной опоры передних конечностей 24, шарнирно соединенной с основанием тренажера 19, электромагнитной муфты торможения 26, предохранительного стопорного устройства 27 с датчиком 28, установленным в зоне соединения ручка 15 основания имитатора 16 (фиг. 2). Работа систем и элементов тренажера строится таким образом. Обучаемый производит фиксацию имитатора 1 по схеме "стоя" посредством жесткого соединения одной, наиболее удаленной задней конечности, так обусловлено технологическим процессом в фиксаторе 23 на основании 19 и подъемом передней (краниальной) части трособлочной системы 20 за рога. Датчик 22 осуществляет факт (момент) жесткого, но подвижного соединения задней конечности. При электрической системе управления подъемом питание от блока 6 поступает на электродвигатель (фиг. 3) до тех пор, пока не сработает при достижении определенного усилия датчик 21 и подает запрещающий сигнал на один из входов блоков (сигнал на выключение). При ручном способе подъема животного срабатывает датчик 22, установленный под подвижной опорой 24 передних конечностей (при отрыве конечностей шарнирно соединенная опора поворачивается, контактный датчик 25 размыкается). Суммарный сигнал от датчиков 22, 25 поступает через систему контроля и управления (блоки 6, 7, 8, 9) на блок индикации 10. Параллельно с этим управляющий электрический сигнал от блока 6 поступает на электромагнитную муфту торможения привода (фиг. 3), которая блокирует ручной привод, исключая тем самым возникновение предельно допустимых нагрузок на головной и шейный отделы объемной модели. При приложении большого усилия к головно-шейной части срабатывает один из датчиков 2, сигнал через блок 6 поступает на блок сравнения 7, сумматор 8, блок индикации 10 и выпадает в визуальной или звуковой форме, характеризуя тем самым отклонение от нормы и снижая общую оценку обучаемого (значительность допущенных ошибок заранее определена и закладывается в программный блок 5). Инерционный датчик 12 контролирует плавность и безударность вхождения активной части зубьев имитатора инструмента в шерстный покров как при расчесывании, так и при основной ческе. При правильном вхождении зубьев, когда вертикальная V3 и горизонтальная V1 скорости перемещения имитатора рабочего инструмента соизмеримы, явление удара не наблюдается и датчик 12, установленный на накопителе 14, не срабатывает. В противном случае, когда V3 > V1, датчик срабатывает, по каналу связи 17 подает сигнал на блок 6 и далее по схеме. При большой горизонтальной скорости Vm1ax перемещения имитатора рабочего инструмента, движение рывком или чрезмерного засоренного покрова, когда возникают большие усилия, которые могут привести к выдиранию или мертвых волос (остоев), а также к деформации самих волокон пуха, срабатывает технологический датчик 13, установленный в задней части основания 16, сигнал подается по каналу связи 18 на блок 6 и далее по схеме сигнала как от датчика 12. При превышении предельно допустимого усилия вычесывания пуха происходит срабатывание предохранительного устройства 27 с датчиком 28 в соединении ручка 15 основание 16 имитатора рабочего инструмента. В этом случае блок допуска 4 по каналу связи 29 получает сигнал и отключает блок питания 3 от всех систем тренажера. Обучаемый в этом случае отстраняется от учебного процесса до тех пор, пока не получают объем соответствующей осведомительной информации ( режим "Информация") и не ответят на контрольные вопросы по тесткарте, имеющейся в блоке доступа 4, т.е. получит разрешение на продолжение обучения. Режим обучения на тренажере выбирается с блока 9 и строится по следующей схеме. Первый этап: (режим "Информация") обучаемому представляется полная информация по всем вопросам обучающей программы на блоке с тренажером, который выдает блок 4, подключая все системы тренажера к блоку питания 3. Второй этап (режим "Репетиция") обучаемый формирует, отрабатывает (шлифует) навыки, приемы, действия. Ему выдается оперативная пооперационная информация на блоке 10 с указанием и разъяснением допущенных ошибок. В этом случае работают все системы (блоки) тренажера и возможна количественная оценка правильности выполнения действий (операций). Третий этап (режим "Контроль") обучаемому не выдается пооперационная информация, а по окончанию процесса выдается общая оценка, указываются допущенные ошибки, и предоставляется разъясняющая информация на блоке индикации 10. При неудовлетворительной оценке система контроля и управления автоматически переводит тренажер в состояние (режим "Информация"). При снятии контрольно-измерительных систем (блока питания, блока управления и контроля, датчиков, средств отображения информации и т.д.) данный тренажер может успешно использоваться как обычное, соответствующее всем требованиям организации труда исполнителя, рабочее место станок для чески животных.ФОРМУЛА ИЗОБРЕТЕНИЯ1. Тренажер для выработки навыков вычесывания пуха у животных, содержащий систему имитации, включающую имитатор рабочего инструмента и установленную на основании стенда объемную модель тела животного, систему контроля и управления, включающую датчики давления, размещенные в поверхностной зоне объемной модели тела животного и датчики технологических параметров имитатора рабочего инструмента, выходы которых связаны соответственно с первым и вторым входами блока формирования сигналов, программный блок, блок сравнения, блок выбора программы обучения, выходы которого подключены к первым входам сумматора и блока индикации, и блок питания, выходы которого соединены с входами питания всех блоков данной системы, отличающийся тем, что система имитации снабжена устройством регулирования положения объемной модели тела животного, включающим поворотный фиксатор одной из задних конечностей упомянутой модели и имеющий привод с электромагнитной муфтой торможения, трособлочный механизм подъема ее краниальной части, а участок основания стенда под передними конечностями указанной модели закреплен шарнирно относительно остальной части основания, причем в систему контроля и управления введены датчик предельно допустимого усилия натяжения троса в указанном трособлочном механизме, выход которого связан с третьим входом блока формирования сигналов, и датчики положения передних и задних конечностей объемной модели тела животного, установленные в зоне контакта данных конечностей с основанием стенда и соединенные с первым входом блока сравнения, второй вход которого связан с выходом блока формирования сигналов, а первый и второй выход подключены соответственно к второму входу сумматора и входу блока выбора программы обучения, причем второй вход последнего связан с выходом сумматора, при этом второй вход блока индикации соединен с третьим выходом блока сравнения, а выход программного блока подключен к четвертому входу блока формирования сигналов, второй и третий выход которого связаны с входами управления привода трособлочного механизма подъема краниальной части объемной модели тела животного и электромагнитной муфты его торможения, причем в качестве имитатора рабочего инструмента и датчиков его технологических параметров применены соответственно имитатор чесального гребня и датчики скорости его введения и усиления вычесывания пуха из шерстного покрова объемной модели тела животного. 2. Тренажер по п.1, отличающийся тем, что в качестве датчиков скорости введения имитатора чесального гребня и усилия вычесывания пуха из шерстного покрова объемной модели тела животного использованы соответственно инерционные и тензометрические датчики. 3. Тренажер по п. 1, отличающийся тем, что имитатор чесального гребня снабжен предохранительным стопорным устройством, установленным в зоне соединения основания и ручки данного имитатора. 4. Тренажер по п.1, отличающийся тем, что в систему контроля и управления введены блок контроля уровня предварительных знаний обучаемого и датчик предельно допустимого усилия вычесывания пуха из шерстного покрова объемной модели тела животного, расположенный в зоне соединения основания и ручки имитатора чесального гребня и связанный через упомянутый блок контроля с входом управления блока питания.Популярные патенты: 2272840 Способ молекулярного маркирования пола хмеля обыкновенного (humulus lupulus l) ... пол растения хмеля на стадии сеянцев. Для этого требуется растительный материал (молодой лист сеянца хмеля), сухая масса которого не превышает 25 мг.Для решения указанной задачи предлагаются две комбинации олигонуклеотидных праймеров, обеспечивающих амплификацию специфичных для мужских растений фрагментов ДНК: 11 OF 5' GGG ACT CGG TAA CAC AGA AAG GCA110R 5' AGC CCC ACC TAC ACC ACG АСА АСС(амплификация фрагмента ДНК длиной 542 пар нуклеотидов)422F 5' CAG TGT TTC TCT CGG GTT CTC TTG422R 5' ААС CAC АСА TAA TTC CCA TCT TGC(амплификация фрагмента ДНК длиной 387 пар нуклеотидов) Для предлагаемых комбинаций праймеров: 110F, R и 422F,R были подобраны условия проведения ПЦР, ... 2384048 Способ испытания травяного покрова на пойме малой реки ... зоны малой реки, а это, в свою очередь, не позволяет определить статистические закономерности изменения урожайности травы и продуктивности луговой почвы от влияния гидрологических и рельефных параметров створов реки.Технический результат - повышение точности измерений по результатам испытаний травяных проб, срезанных с пробных площадок на территории пойменного луга, и повышение функциональных возможностей выявления закономерностей влияния параметров рельефа и антропогенных долговременных воздействий на урожайность луговой травы и продуктивность почвы на пойме малой реки или ее отдельного притока.Этот технический результата достигается тем, что способ испытания травяного ... 2415529 Нижняя тяга для навески трактора ... - вид в перспективе и сверху стопорного элемента.Фиг.7 - вид в перспективе и снизу стопорного элемента. На фиг.1 показано сельскохозяйственное транспортное средство в форме трактора 10, который содержит опирающуюся на передние управляемые колеса 12 и задние приводные колеса 14 раму 16, которая несет кабину 18 с расположенным в ней рабочим местом оператора. На задней стороне рамы (16) (или соединенным с ней надстроенным элементом) закреплена трехточечная навеска 20 с двумя нижними тягами 22 (из которых показана только одна) и одной, расположенной выше, гидравлической центральной тягой 24. Нижние тяги 22 оснащены на обоих концах проушинами 26 шаровых шарниров, которые ... 2399200 Устройство для обработки роговых образований животных, например крупного рогатого скота ... в них конусных частей штоков, снабженных металлическими экранами с возможностью взаимодействия с соленоидами электромагнитов. Полости вверху имеют сообщение через трубку с регулируемым редукционным клапаном и манометром. Одна из полостей через трубку с регулируемым редукционным клапаном сообщается с малогабаритным компрессором. Внизу от конусных гнезд отходят трубки, которые после слияния заканчиваются гибким шлангом с наконечником для выхода из его сопла под давлением струи воздуха, или струи жидкости, или их смеси. Тумблеры раздельно включают в работу имеющийся электродвигатель, соленоиды электромагнитов каждой полости, компрессор и находятся на корпусе-рукоятке основной части ... 2271096 Способ прогнозирования урожайности озимых зерновых культур в условиях засушливого климата ... культур в условиях засушливого климата / А.Ф.Рогачев, A.M.Салдаев, Д.А.Рогачев (RU). - Заявка №2002126981/12; Заявлено 09.10.2002; Опубл. 20.05. 2004, Бюл. №14).К недостаткам описанного способа применительно к решаемой нами проблеме относится то, что данный способ не учитывает фактическую норму высева, длительность посева в днях от начала рекомендуемых сроков, сортовые качества семян в накоплении зерновой массы, влияние температурного режима на формирование корневой системы растений, размещение растений на поверхности поля. Отсутствие учета указанных факторов в данном способе не позволяет получить достоверный прогноз урожайности озимых зерновых культур при возделывании в ... |
Еще из этого раздела: 2500104 Способ приготовления препарата костной ткани и набор для его осуществления 2281637 Способ производства зеленого корма при возделывании в орошаемом земледелии и устройство для его осуществления 2060659 Установка для переработки органического субстрата в биогумус 2124290 Препаративная форма в виде раствора для местного применения для обработки животных (варианты), способ получения и способ обработки животных (варианты) 2142696 Способ выращивания цветочных и декоративных растений в тепличных и домашних условиях 2027346 Лесозаготовительная машина 2033002 Орудие для междурядной обработки почвы 2236124 Способ создания местообитания и адаптации молоди объектов аквакультуры в водных экосистемах 2216903 Устройство для отделения плодов от ветвей 2199860 Способ увеличения устойчивости подсолнечника к действию гербицида |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||