Способ управления работой уборочной машиныПатент на изобретение №: 2078170 Автор: Брик Р.В., Асмолов Г.И. Патентообладатель: Московский государственный автомобильно-дорожный институт (технический университет) Дата публикации: 27 Апреля, 1997 Адрес для переписки: подача заявки24.06.1994 публикация патента27.04.1997 Изображения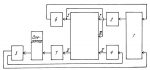 Использование: в машиностроении при работе различных уборочных машин, в частности снегоочистителей и комбайнов непрерывного действия, преимущественно с механической трансмиссией. Сущность изобретения: способ управления работой уборочной машины включает измерение текущих значений технологических параметров машины, сравнение их с установленными значениями и регулирование скорости движения машины в соответствии с результатами сравнения. При этом в качестве технологических параметров используют значения скорости вращения рабочего органа и значение силы тягового сопротивления ее движению. Причем для каждой главной передачи трансмиссии машины задают соответствующий ей диапазон изменения значений тяговых сопротивлений движению. Подбирают диапазон изменения тяговых сопротивлений, включающий текущее значение тягового сопротивления, и выявляют совпадение текущего номера главной передачи машины с номером, соответствующим выбранному диапазону. Скоростью вращения рабочего органа управляют в случае принадлежности текущего значения тягового сопротивления установленному диапазону, при этом определяют попадание текущего значения тягового сопротивления движению машины в диапазон изменения значений тяговых усилий. Возможность работы уборочной машины в оптимальном режиме в зависимости от величины текущей силы тягового сопротивления движению позволяет повысить экономичность работы и оптимизировать загрузку двигателя, а также увеличить ресурс работы рабочего органа и самой уборочной машины. 1 ил. ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУИзобретение относится к машиностроению и может быть использовано при работе различных уборочных машин, в частности снегоочистителей и комбайнов, а также экскаваторов непрерывного действия, базирующихся на любых серийных транспортных средствах, преимущественно с механической трансмиссией. Известен способ управления работой снегоочистителя [1] оборудованного гидрообъемным приводом, изменяющим скорость вращения рабочего органа непосредственно по величине силы тягового сопротивления движению за счет использования кинематической связи регулятора мощности с гидромотором привода рабочего органа. Однако данный способ не предусматривает изменения скорости движения снегоочистителя, а также стабилизацию скорости вращения рабочего органа в зависимости от текущего значения силы тягового сопротивления движению машины. Это заставляет оператора постоянно следить за скоростью движения транспортного средства и частотой вращения коленчатого вала его двигателя, а также вызывает повышенный износ рабочего органа транспортного средства, двигателя и увеличивает расход горюче-смазочных материалов. Наиболее близким технически решением, взятым в качестве прототипа, является известный способ автоматического управления технологическим процессом зерноуборочного комбайна [2] включающий измерение, определение и сравнение средних значений подачи сельхозкультуры, интенсивности потерь, угловой скорости вала двигателя комбайна при обмотке сельхозкультуры и на холостом ходу и изменение скорости перемещения комбайна по полученным результатам с целью повышения качества обмолота. Однако данный способ не обеспечивает изменения скорости движения уборочной машина при оптимальном режиме работы двигателя в зависимости от текущего значения силы тягового сопротивления движению машины, а также не позволяет изменять скорость вращения рабочего органа или подачу убираемого материала. Это отрицательно сказывается на моторесурсе и надежности двигателя и не позволяет полностью оптимизировать технологический процесс уборки, а также вызывает повышенный расход горюче-смазочных материалов. Целью изобретения является оптимизация процесса уборки за счет автоматизированного изменения тягового усилия базового транспортного средства, а также автоматического изменения скорости вращения рабочего органа в зависимости от значения тягового сопротивления движению уборочной машины. Поставленная задача достигается тем, что в способе, включающем изменение несущих значений технологических параметров машины, сравнение измеренных значений с заданными диапазонами изменения этих параметров и изменение скорости движения машины в соответствии с результатами сравнения данных величин, согласно изобретению, в качестве технологических параметров используют скорость вращения рабочего органа, силу тягового сопротивления ее движению, при этом для каждой главной передачи машины устанавливают соответствующий ей диапазон изменения значений тяговых сопротивлений движению машины Wнi-Wвi, причем для высшей главной передачи задают с ее предельным значением данного диапазона определяемое по формуле Wнi=G fk, где G вес рабочего органа уборочной машины, а fk 0,025-0,25 - коэффициент сопротивления перекатыванию машины, а верхнее предельное значение диапазона изменения контролируемого параметра для высшей и во всех последующих главных передачах вычисляют по формуле Wвi=Pm+KPm где Pm тяговое усилие на соответствующей главной передаче, а коэффициент соответствия K 0,05-0,15, при этом верхнее предельное значение диапазона изменения контролируемого параметра для последующей главной передачи устанавливают равной нижнему предельному значению для предыдущей, после чего подбирают диапазон изменения тяговых сопротивлений движению машины, включающей текущее значение этого параметра Wi, и сравнивают текущий номер главной передачи с номером, соответствующим выбранному диапазону, при совпадении значений номеров главных передач считают режим работы уборочной машины оптимальным и переходят к регулированию скорости вращения рабочего органа, а при несовпадении номеров передач устанавливают соответствующий диапазону новый номер главной передачи, повторно измеряют значения силы тягового сопротивления движению машины Wi и повторяют цикл обработки сигналов до совпадения значений текущего и выбранного соответственно диапазону значений номеров главных передач, причем при регулировании скорости вращения рабочего органа определяют показания скорости вращения рабочего органа, определяют показания текущего значения силы тягового сопротивления Wi в диапазон изменения тяговых усилий, определяемых по формуле Pнв=Pm+K1Pm, где K1 (-0,03-0,07) коэффициент соответствия, причем отрицательные значения коэффициента K1 выбирают при определении нижнего предельного значения диапазона изменения данного параметра Pн, и если текущее значение тягового сопротивления Wi движению машины попадает в указанный диапазон, то устанавливают среднее значение скорости вращения рабочего органа fk, где G вес рабочего органа уборочной машины, а fk 0,025-0,25 - коэффициент сопротивления перекатыванию машины, а верхнее предельное значение диапазона изменения контролируемого параметра для высшей и во всех последующих главных передачах вычисляют по формуле Wвi=Pm+KPm где Pm тяговое усилие на соответствующей главной передаче, а коэффициент соответствия K 0,05-0,15, при этом верхнее предельное значение диапазона изменения контролируемого параметра для последующей главной передачи устанавливают равной нижнему предельному значению для предыдущей, после чего подбирают диапазон изменения тяговых сопротивлений движению машины, включающей текущее значение этого параметра Wi, и сравнивают текущий номер главной передачи с номером, соответствующим выбранному диапазону, при совпадении значений номеров главных передач считают режим работы уборочной машины оптимальным и переходят к регулированию скорости вращения рабочего органа, а при несовпадении номеров передач устанавливают соответствующий диапазону новый номер главной передачи, повторно измеряют значения силы тягового сопротивления движению машины Wi и повторяют цикл обработки сигналов до совпадения значений текущего и выбранного соответственно диапазону значений номеров главных передач, причем при регулировании скорости вращения рабочего органа определяют показания скорости вращения рабочего органа, определяют показания текущего значения силы тягового сопротивления Wi в диапазон изменения тяговых усилий, определяемых по формуле Pнв=Pm+K1Pm, где K1 (-0,03-0,07) коэффициент соответствия, причем отрицательные значения коэффициента K1 выбирают при определении нижнего предельного значения диапазона изменения данного параметра Pн, и если текущее значение тягового сопротивления Wi движению машины попадает в указанный диапазон, то устанавливают среднее значение скорости вращения рабочего органа  ср если текущее значение тягового сопротивления Wi меньше нижнего предельного значения указанного диапазона, то устанавливают минимальное значение скорости вращения рабочего органа min если текущее значение тягового сопротивления больше верхнего предельного значения этого диапазона, то устанавливают максимальную скорость вращения рабочего органа max уборочной машины. На чертеже представлена структурная схема взаимодействия элементов системы управления технологическим процессом уборки. Предлагаемое устройство содержит объект управления 1 уборочную машину, на рабочем органе которой установлен датчик текущего значения тягового сопротивления 2, исполнительный механизм 3, изменяющий скорость движения машины, датчик текущего передаточного отношения трансмиссии 4, установленный на исполнительном механизме 3, который может быть при механической трансмиссии в виде коробки перемены передач, вычислительный блок 5, первый вход которого соединен с выходом датчика текущего значения тягового сопротивления 2. Второй вход вычислительного блока 2 соединен с выходом датчика текущего передаточного отношения трансмиссии 4. Первый выход вычислительного блока 5 соединен с исполнительным механизмом 6, изменяющий скорость вращения рабочего органа, а также с третьим входом вычислительного блока 5. Исполнительный механизм 6 может быть любым в соответствии с типом привода рабочего органа, например, электрораспределитель, если привод рабочего органа гидравлический. Второй выход вычислительного блока 5 связан со входом устройства отображения информации 7. Работа уборочной машины осуществляется следующим образом. При поступательном движении уборочной машины, на выбранной оператором передаче убираемый или разбрасываемый материал захватывается по всей ширине рабочего органа. При изменении плотности или объема убираемого материала изменяется тяговое сопротивление движению. Это изменение фиксируется датчиком 2 и информация поступает на I-й вход вычислительного блока 5. Также в вычислительный блок на II-й вход поступает информация от датчика текущего номера передачи трансмиссии 4. На III-й вход вычислительного блока 5 поступают данные о скорости вращения рабочего органа, определяемые по ранее выданному сигналу управления с выхода I-го вычислительного блока 5 на исполнительный механизм 6, изменяющий скорость вращения рабочего органа. Предварительно для конкретной уборочной машины определяют диапазоны изменения тяговых сопротивлений Wнi-Wвi, соответствующие каждой главной передаче трансмиссии машины. Причем для высшей главной передачи устанавливают нижнее предельное значение данного диапазона, определяемое по формуле Wнi Gfk, где G вес рабочего органа уборочной машины, а fk коэффициент сопротивления перекатыванию, зависящий от физико-механических свойств убираемого или разрабатываемого материала, а верхнее предельное значение диапазона изменения контролируемого параметра для высшей и всех последующих главных вычисляют по формуле Wвi=Pm+KPm, где Pm тяговое усилие на соответствующей главной передаче, а коэффициент соответствия K выбирают в диапазоне K 0,05-0,15. При этом большие значения коэффициента соответствуют высшим передачам, а верхнее предельное значение диапазона изменения контролируемого параметра для последующей главной передачи устанавливают равным нижнему предельному значению для предыдущего. Установленные диапазоны записывают в память вычислительного блока 5. Также в память вычислительного блока записывают диапазоны изменения значений тяговых усилий Pm для каждой главной передачи уборочной машины, пределы которых определяют по формуле Pнв Pm+K1Pm, где K1 (-0,03-0,07), причем отрицательные значения коэффициента выбирают при определении нижнего предельного значения диапазона изменения данного интервала, а Pm тяговое усилие на соответствующей главной передаче. Значения коэффициента K получают при расчете конкретной уборочной машины по методике, изложенной в [3] Вычисляя значение тягового сопротивления движению, можно показать, что изменяя окружную скорость рабочего органа на одну единицу, тяговое сопротивление изменится на 5-8% причем большие значения соответствуют высшим передачам. Следовательно, изменяя окружную скорость w рабочего органа на две единицы, тяговое сопротивление изменяют в пределах 9-15% Отсюда получают предельные значения коэффициента K=0,05-0,15. Из приведенного выше обоснования вытекает также величина верхнего предельного значения коэффициента K1, а нижнее предельное значение этого коэффициента принимается исходя из необходимости обеспечения гарантированного предохранения машины от работы в околокритическом режиме. После поступления информации на входы I, II, III вычислительный блок подбирает интервал тяговых сопротивлений W, включающий текущее значение силы тягового сопротивления Wi, измеренного датчиком 2, и выявляется совпадение текущего номера главной передачи с номером, соответствующим выбранному диапазону. При совпадении значений номеров главных передач считают режим работы уборочной или землеройной машины оптимальным и переходят к управлению скорости вращения рабочего органа. При несовпадении номеров главных передач вычислительный блок 5 выдает управляющий сигнал на устройство отображения информации 7, где индицируется рекомендуемое значение номера главной передачи. После установки оператором рекомендуемой главной передачи происходит повторное измерение датчиком 2 текущего значения силы тягового сопротивления Wi, повторяют цикл обработки сигналов вычислительным блоком 5 до совпадения текущего и выбранного соответственно диапазону значений номеров главных передач. Причем при регулировании скорости вращения рабочего органа машины определяют попадания текущего значения силы тягового сопротивления движению машины Wi, измеренного датчиком 2, в диапазон изменений значений тяговых усилий Pm. Если текущее значение тягового сопротивления движению машины Wi попадает в этот диапазон, то в зависимости от ранее установленной скорости вращения рабочего органа вычислительный блок 5 выдает управляющий сигнал на исполнительный механизм 6, изменяющий скорость вращения рабочего органа. В соответствии с этим сигналом исполнительный механизм 6 устанавливает среднюю скорость вращения рабочего органа wср В случае ранее установленного среднего значения скорости вращения рабочего органа ср вычислительный блок 5 не выдает управляющего сигнала на исполнительный механизм 6. Если текущее значение тягового сопротивления Wi меньше нижнего предельного значения упомянутого диапазона изменения тяговых усилий Pmн, то при ранее не установленном минимальном значении скорости вращения рабочего органа min вычислительный блок 5 выдает управляющий сигнал на исполнительный механизм 6, изменяющий скорость вращения рабочего органа. В соответствии с этим сигналом исполнительный механизм 6 устанавливает минимальную скорость вращения рабочего органа min. Если текущее значение тягового сопротивления Wi больше верхнего предельного значения диапазона изменения тяговых усилий Pmв, то при ранее не установленном максимальном значении скорости вращения рабочего органа max вычислительный блок выдает сигнал на исполнительный механизм 6 для изменения скорости вращения рабочего органа до максимального его значения max При максимальном значении скорости вращения рабочего органа с повышенной интенсивностью разрабатывается или убирается забой перед рабочим органом и тем самым снижается тяговое сопротивление Wi что приводит к увеличению рабочей скорости машины и, соответственно, ее производительности. Таким образом, рассматриваемый способ позволяет автоматизировать работу уборочной машины непрерывного действия, технологический процесс вести при оптимальном режиме в зависимости от величины текущей силы тягового сопротивления движению машины, что в свою очередь позволяет повысить рабочую скорость и, соответственно, производительность, а также качество уборки. Кроме того, автоматическое управление скоростью вращения рабочего органа позволяет повысить экономичность работы и оптимизировать загрузку двигателя, а также увеличить ресурс работы рабочего органа и основного транспортного средства. Литература 1. Авторское свидетельство СССР N 1135833, кл. E 01 H 5/09, 1985. 2. Авторское свидетельство СССР N 1720545, кл. A 01 D 41/12, 1986. 3. Ермилов А.Б. Учебное пособие. Расчет и проектирование снегоочистителей. М. изд-во МАДИ, 1989, с. 3-12, 67-87. ср если текущее значение тягового сопротивления Wi меньше нижнего предельного значения указанного диапазона, то устанавливают минимальное значение скорости вращения рабочего органа min если текущее значение тягового сопротивления больше верхнего предельного значения этого диапазона, то устанавливают максимальную скорость вращения рабочего органа max уборочной машины. На чертеже представлена структурная схема взаимодействия элементов системы управления технологическим процессом уборки. Предлагаемое устройство содержит объект управления 1 уборочную машину, на рабочем органе которой установлен датчик текущего значения тягового сопротивления 2, исполнительный механизм 3, изменяющий скорость движения машины, датчик текущего передаточного отношения трансмиссии 4, установленный на исполнительном механизме 3, который может быть при механической трансмиссии в виде коробки перемены передач, вычислительный блок 5, первый вход которого соединен с выходом датчика текущего значения тягового сопротивления 2. Второй вход вычислительного блока 2 соединен с выходом датчика текущего передаточного отношения трансмиссии 4. Первый выход вычислительного блока 5 соединен с исполнительным механизмом 6, изменяющий скорость вращения рабочего органа, а также с третьим входом вычислительного блока 5. Исполнительный механизм 6 может быть любым в соответствии с типом привода рабочего органа, например, электрораспределитель, если привод рабочего органа гидравлический. Второй выход вычислительного блока 5 связан со входом устройства отображения информации 7. Работа уборочной машины осуществляется следующим образом. При поступательном движении уборочной машины, на выбранной оператором передаче убираемый или разбрасываемый материал захватывается по всей ширине рабочего органа. При изменении плотности или объема убираемого материала изменяется тяговое сопротивление движению. Это изменение фиксируется датчиком 2 и информация поступает на I-й вход вычислительного блока 5. Также в вычислительный блок на II-й вход поступает информация от датчика текущего номера передачи трансмиссии 4. На III-й вход вычислительного блока 5 поступают данные о скорости вращения рабочего органа, определяемые по ранее выданному сигналу управления с выхода I-го вычислительного блока 5 на исполнительный механизм 6, изменяющий скорость вращения рабочего органа. Предварительно для конкретной уборочной машины определяют диапазоны изменения тяговых сопротивлений Wнi-Wвi, соответствующие каждой главной передаче трансмиссии машины. Причем для высшей главной передачи устанавливают нижнее предельное значение данного диапазона, определяемое по формуле Wнi Gfk, где G вес рабочего органа уборочной машины, а fk коэффициент сопротивления перекатыванию, зависящий от физико-механических свойств убираемого или разрабатываемого материала, а верхнее предельное значение диапазона изменения контролируемого параметра для высшей и всех последующих главных вычисляют по формуле Wвi=Pm+KPm, где Pm тяговое усилие на соответствующей главной передаче, а коэффициент соответствия K выбирают в диапазоне K 0,05-0,15. При этом большие значения коэффициента соответствуют высшим передачам, а верхнее предельное значение диапазона изменения контролируемого параметра для последующей главной передачи устанавливают равным нижнему предельному значению для предыдущего. Установленные диапазоны записывают в память вычислительного блока 5. Также в память вычислительного блока записывают диапазоны изменения значений тяговых усилий Pm для каждой главной передачи уборочной машины, пределы которых определяют по формуле Pнв Pm+K1Pm, где K1 (-0,03-0,07), причем отрицательные значения коэффициента выбирают при определении нижнего предельного значения диапазона изменения данного интервала, а Pm тяговое усилие на соответствующей главной передаче. Значения коэффициента K получают при расчете конкретной уборочной машины по методике, изложенной в [3] Вычисляя значение тягового сопротивления движению, можно показать, что изменяя окружную скорость рабочего органа на одну единицу, тяговое сопротивление изменится на 5-8% причем большие значения соответствуют высшим передачам. Следовательно, изменяя окружную скорость w рабочего органа на две единицы, тяговое сопротивление изменяют в пределах 9-15% Отсюда получают предельные значения коэффициента K=0,05-0,15. Из приведенного выше обоснования вытекает также величина верхнего предельного значения коэффициента K1, а нижнее предельное значение этого коэффициента принимается исходя из необходимости обеспечения гарантированного предохранения машины от работы в околокритическом режиме. После поступления информации на входы I, II, III вычислительный блок подбирает интервал тяговых сопротивлений W, включающий текущее значение силы тягового сопротивления Wi, измеренного датчиком 2, и выявляется совпадение текущего номера главной передачи с номером, соответствующим выбранному диапазону. При совпадении значений номеров главных передач считают режим работы уборочной или землеройной машины оптимальным и переходят к управлению скорости вращения рабочего органа. При несовпадении номеров главных передач вычислительный блок 5 выдает управляющий сигнал на устройство отображения информации 7, где индицируется рекомендуемое значение номера главной передачи. После установки оператором рекомендуемой главной передачи происходит повторное измерение датчиком 2 текущего значения силы тягового сопротивления Wi, повторяют цикл обработки сигналов вычислительным блоком 5 до совпадения текущего и выбранного соответственно диапазону значений номеров главных передач. Причем при регулировании скорости вращения рабочего органа машины определяют попадания текущего значения силы тягового сопротивления движению машины Wi, измеренного датчиком 2, в диапазон изменений значений тяговых усилий Pm. Если текущее значение тягового сопротивления движению машины Wi попадает в этот диапазон, то в зависимости от ранее установленной скорости вращения рабочего органа вычислительный блок 5 выдает управляющий сигнал на исполнительный механизм 6, изменяющий скорость вращения рабочего органа. В соответствии с этим сигналом исполнительный механизм 6 устанавливает среднюю скорость вращения рабочего органа wср В случае ранее установленного среднего значения скорости вращения рабочего органа ср вычислительный блок 5 не выдает управляющего сигнала на исполнительный механизм 6. Если текущее значение тягового сопротивления Wi меньше нижнего предельного значения упомянутого диапазона изменения тяговых усилий Pmн, то при ранее не установленном минимальном значении скорости вращения рабочего органа min вычислительный блок 5 выдает управляющий сигнал на исполнительный механизм 6, изменяющий скорость вращения рабочего органа. В соответствии с этим сигналом исполнительный механизм 6 устанавливает минимальную скорость вращения рабочего органа min. Если текущее значение тягового сопротивления Wi больше верхнего предельного значения диапазона изменения тяговых усилий Pmв, то при ранее не установленном максимальном значении скорости вращения рабочего органа max вычислительный блок выдает сигнал на исполнительный механизм 6 для изменения скорости вращения рабочего органа до максимального его значения max При максимальном значении скорости вращения рабочего органа с повышенной интенсивностью разрабатывается или убирается забой перед рабочим органом и тем самым снижается тяговое сопротивление Wi что приводит к увеличению рабочей скорости машины и, соответственно, ее производительности. Таким образом, рассматриваемый способ позволяет автоматизировать работу уборочной машины непрерывного действия, технологический процесс вести при оптимальном режиме в зависимости от величины текущей силы тягового сопротивления движению машины, что в свою очередь позволяет повысить рабочую скорость и, соответственно, производительность, а также качество уборки. Кроме того, автоматическое управление скоростью вращения рабочего органа позволяет повысить экономичность работы и оптимизировать загрузку двигателя, а также увеличить ресурс работы рабочего органа и основного транспортного средства. Литература 1. Авторское свидетельство СССР N 1135833, кл. E 01 H 5/09, 1985. 2. Авторское свидетельство СССР N 1720545, кл. A 01 D 41/12, 1986. 3. Ермилов А.Б. Учебное пособие. Расчет и проектирование снегоочистителей. М. изд-во МАДИ, 1989, с. 3-12, 67-87.
ФОРМУЛА ИЗОБРЕТЕНИЯСпособ управления работой уборочной машины, включающий задание диапазонов изменения технологических параметров машины в процессе уборки, измерение текущих значений этих параметров и регулирование по результату их сравнения, скорости движения машины, отличающийся тем, что в качестве технологических параметров машины в процессе уборки используют скорость вращения рабочего органа машины и силу тягового сопротивления ее движению, при этом для каждой главной передачи трансмиссии машины задают соответствующий ей диапазон изменения значений тяговых сопротивлений движению Wнi oC Wвi, причем для высшей главной передачи устанавливают нижнее предельное значение данного диапазона, определяемое по формуле Wнi G fK, где G вес рабочего органа уборочной машины; fK 0,025 0,25 коэффициент сопротивления перекатыванию машины, а верхнее предельное значение диапазона изменения контролируемого параметра для высшей и всех последующих главных передач вычисляют по формуле Wвi Pm + K Pm, где Pm тяговое усилие на соответствующей главной передаче; К 0,05 0,15 коэффициент соответствия, при этом верхнее предельное значение диапазона изменения контролируемого параметра для последующей главной передачи устанавливают равным нижнему предельному значению для предыдущей, подбирают диапазон изменения тяговых сопротивлений движению машины, включающий текущее значение этого параметра Wi и сравнивают текущий номер главной передачи с номером, соответствующим выбранному диапазону, при совпадении значений номеров главных передач считают режим работы уборочной машины оптимальным и переходят к регулированию скорости вращения рабочего органа, а при несовпадении номеров передач устанавливают соответствующий диапазону номер передачи, повторно измеряют значение силы тягового сопротивления движению машины Wi и повторяют цикл обработки сигналов до совпадения текущего и выбранного соответственно диапазону значений номеров главных передач, причем при регулировании скорости вращения рабочего органа машины определяют попадание текущего значения силы тягового сопротивления движению машины Wi в диапазон изменений значений тяговых усилий, определяемых по формуле Pнв Pm + K1Pm, где K1 0,03 0,07 коэффициент соответствия, причем отрицательные значения коэффициента K1 выбирают при определении нижнего предельного значения диапазона изменения данного параметра, и, если текущее значение тягового сопротивления движения машины Wi попадает в указанный диапазон, то устанавливают среднее значение скорости вращения рабочего органа cp, если текущее значение тягового сопротивления Wi меньше нижнего предельного значения упомянутого диапазона, то устанавливают минимальное значение скорости вращения рабочего органа min, а если текущее значение тягового сопротивления Wi больше верхнего предельного значения этого диапазона, то устанавливают максимальную скорость вращения рабочего органа уборочной машины max.рПопулярные патенты: 2238970 Штамм mycelia sterilia лх-1-продуцент комплекса биологически активных веществ, обладающих рострегуляторными свойствами ... сеянцев ели (внекорневая подкормка), картофеля (полив всходов), капусты поздней (подкормка рассады накануне высадки в грунт), томаты (внекорневая подкормка), огурцы (полив всходов). Вели морфофизиологические и фенологические наблюдения, учитывали урожай продукции, определяли некоторые параметры, характеризующие качество продукции. Результаты приведены в таблице 3. Контроль (100%) - показатели продукции с участка, не обрабатываемой заявляемым штаммом. Заявляемый штамм осуществляет положительное влияние на растения посредством прямой и непосредственной стимуляции роста растений за счет синтеза различных метоболитов, полезных для растений. Препарат, изготовленный на основе ... 2086081 Рабочий орган культиватора ... сторонах профиля выполнены отбуртовки, направленные внутрь профиля; развертка профиля выполнена в виде фигуры, вписывающейся четырьмя сторонами в правильный ромб. На фиг.1 изображен общий вид рабочего органа культиватора, вид слева; на фиг. 2 то же, вид в плане; на фиг.3 то же, вид спереди; на фиг.4 разрез А-А на фиг.1; на фиг.5 развертка [-образного профиля; на фиг.6 общий вид рабочего органа культиватора с двумя [-образными профилями, вид спереди; на фиг.7 то же, вид в плане; на фиг.8 и 9 разрезы Б-Б и В-В на фиг.6 соответственно; на фиг.10 разрез Г-Г на фиг.9; на фиг.11 и 12 схемы, иллюстрирующие выкройки [-образного профиля из полосового и листового проката ... 2216908 Комбайн для уборки урожая с кустарников ... их в активационную камеру, между барабанными встряхивателями, имеющими эллипсную боковую поверхность, установлены пружинные направляющие, выносной транспортер связан с прутковым транспортером, над последним размещен вентилятор, а под ним наклонный транспортер, при этом один из плодосборников установлен на выходе пруткового и наклонного транспортеров, а другой - под наклонным транспортером.2. Комбайн для уборки урожая с кустарников по п.1, отличающийся тем, что механизм для срезания кустов выполнен в виде дисковой пилы, установленной в нижней части рамы на входе активационной камеры, а дисковая пила расположена между стеблеподъемниками.3. Комбайн для уборки урожая с кустарников по ... 2470922 Сокристаллы ... Картины дифракции рентгеновских лучей на порошках ципродинила форма (A) (a), ципродинила форма B (b), сокристаллов ципродинил-4-гидрокси-4-бифенилкарбоновая кислота форма B (c) и 4-гидрокси-4-бифенилкарбоновой кислоты (d).Таблица 9: значения углов 2 для избранных пиков картины дифракции рентгеновских лучей на порошке сокристаллов ципродинил-4-гидрокси-4-бифенилкарбоновая кислота. Фиг.17: кривые DSC ципродинила, форма B (a), сокристаллов ципродинил-4-гидрокси-4-бифенилкарбоновая кислота, форма B (b) и 4-гидрокси-4-бифенилкарбоновой кислоты (c).Методика эксперимента Для получения сокристаллов 1:1 путем кристаллизации при охлаждении 1,0 г ципродинила добавляли в 40 мл ... 2400042 Высевающий аппарат ... дозатора сыпучих материалов. Формула изобретения Высевающий аппарат, содержащий корпус с верхним и нижним окнами и расположенным внутри валом шагового двигателя, на котором закреплена катушка с желобками, две шторки из эластичного и упругого материала, жестко закрепленные одними концами в верхнем окне и установленные с возможностью контактирования с катушкой, при этом шаговый двигатель закреплен на корпусе и связан посредством блока управления с датчиком скорости, отличающийся тем, что он снабжен двумя дисками из эластичного материала с диаметром большим, чем наружный диаметр катушки, к торцам которой они жестко прикреплены с образованием зазора относительно корпуса, а также ... |
Еще из этого раздела: 2262844 Способ повышения эффективности воспроизводства икры и численности осетрообразных рыб 2245013 Устройство для обмолота легкоповрежденных культур на примере нута (варианты) 2455815 Самоходный универсальный комбайн для уборки картофеля и топинамбура 2159721 Способ и устройство для крепления двигателя мотокультиватора 2479988 Способ формирования линейно ориентированного виноградника с капельным орошением (версия 3) 2235450 Малогабаритная машина для обескрыливания, очистки и сортирования лесных семян 2028749 Капустоуборочная машина 2438300 Молочная холодильная установка 2295848 Способ дезинсекции и дезинфекции материалов зернового происхождения и устройство для его осуществления 2289908 Способ получения рассады стевии |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||