Устройство для автоматического вождения сельскохозяйственного агрегатаПатент на изобретение №: 2032297 Автор: Мироненко В.Г., Нагорный Н.Н., Барановский Н.В. Патентообладатель: Украинский научно-исследовательский институт механизации и электрификации сельского хозяйства Дата публикации: 10 Апреля, 1995 Изображения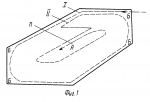 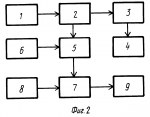 Использование: в сельскохозяйственном машиностроении, в частности в устройствах для автоматического вождения с/х агрегатов. Сущность изобретения: устройство содержит копирующий щуп, чувствительную головку, включенную в схему управления направлением движения, механизмы рулевого управления и изменения ширины захвата плуга и сумматор. Первый вход сумматора подключен к дополнительному выходу чувствительной головки, второй - к задатчику допустимого угла изменения ширины захвата плуга, выход соединен с первым входом дифференциатора сигнала команд на изменение ширины захвата плуга, к второму входу которого подключен датчик действительной скорости движения агрегата, а выход устройства соединен с механизмом изменения ширины захвата плуга. 2 ил. Изобретение относится к сельскому хозяйству, в частности к автоматическому вождению сельскохозяйственных агрегатов. Известно устройство для канатной тяги сельскохозяйственных орудий с применением тяговой повозки, дающей движение сельскохозяйственному орудию по кругу. Недостатком этого устройства является то, что оно пригодно для обработки полей только круглой формы и ограниченных размеров. Кроме того, при этом ухудшаются условия работы орудий, что выдвигает особые требования к их конструкции. Наиболее близким техническим решением к предлагаемому является устройство для автоматического вождения колесного трактора на гоне, содержащее копирующий щуп, чувствительную головку, включенную в схему управления трехпозиционным золотником гидроусилителя рулевого механизма, и кран для перехода с ручного управления на автоматическое и наоборот. Однако такое устройство эффективно используется только на рабочем гоне (в среднем 85.92% общего пути). На поворотной полосе необходимо переходить на ручное управление агрегатом с разрывом технологического процесса. Задача изобретения обеспечение возможности вспашки полей выпуклых форм или части поля выпуклой формы без разрыва технологического процесса. Эта задача решается благодаря тому, что устройство для автоматического вождения пахотного сельскохозяйственного агрегата, содержащее копирующий щуп, чувствительную головку, включенную в схему управления направлением движения, механизм рулевого управления и механизм изменения ширины захвата плуга, содержит также сумматор, первый вход которого подключен к дополнительному выходу чувствительной головки, второй вход к задатчику допустимого угла изменения направления движения агрегата без изменения ширины захвата плуга, а выход соединен с первым входом дифференциатора сигнала на изменение ширины захвата плуга, ко второму входу которого подключен датчик действительной скорости движения агрегата, а выход устройства соединен с механизмом изменения ширины захвата плуга. Известны плуги с изменяемой шириной захвата, которые позволяют путем изменения ширины захвата в рабочем положении совершать повороты для объезда препятствий и запахивать клинья поля. Предлагаемое устройство, изменяя угол установки корпусов плуга в зависимости от нагрузки на рабочие органы, дает возможность обрабатывать поля любых форм без разрыва технологического процесса. Процесс обработки поля в данном случае следующий (см. фиг. 1). Оператор, управляя агрегатом вручную, делает первый проход (I) по контуру поля. После завершения первого прохода оператор заводит копирующий щуп в след первого прохода, включает в работу устройство для автоматического вождения и дальнейшая обработка поля (проходы II и т.д.) осуществляется путем автоматического вождения. Когда агрегат приблизится к площадке в центре поля (А), которую невозможно обработать круговым способом, оператор переходит на ручное управление агрегатом и завершает обработку или выводит агрегат из обработанного поля. Участки по углам поля (Б), а при необходимости и участок в центре поля могут быть использованы для посадки лесополос, устройства противоэрозионных валов, каналов для полива и других вспомогательных целей. В этом случае коэффициент использования площади поля не уменьшается в сравнении с традиционным размещением лесополос по периметру прямоугольных полей, а коэффициент использования рабочих ходов агрегата приближается к единице, что на 7. 25% выше по сравнению с работой агрегата с выглублением орудия на поворотных полосах. На фиг. 1 изображена одна из возможных схем движения агрегата; на фиг. 2 структурная схема предлагаемого устройства. Устройство для автоматического вождения пахотного агрегата содержит копирующий щуп 1, устанавливаемый впереди трактора и предназначенный для копирования борозды предыдущего прохода и поворота оси чувствительной головки на угол, пропорциональный величине отклонения направления движения трактора от борозды, чувствительную головку 2, жестко связанную с копирующим щупом и служащую для формирования электрических сигналов, передаваемых на схему 3 управления направлением движения при отклонении копирующего щупа от нейтрального положения, вход которой соединен с чувствительной головкой 2, а выход с механизмом рулевого управления 4, сумматор 5, первый вход которого соединен с вторым выходом чувствительной головки 2, второй вход с задатчиком 6 допустимого угла изменения направления движения без изменения ширины захвата плуга, которым задаются допустимые углы изменения направления движения плуга для разных почв, чтобы избежать поломки корпусов плуга при поворотах. Выход сумматора соединен с первым входом дифференциатора сигнала команд 7 на изменения ширины захвата плуга, второй вход которого соединен с датчиком 8 действительной скорости агрегата. Дифференциатор выполнен по схеме электрической RC-цепи и реализует функцию  вых(t) K вых(t) K   1 1  где K коэффициент усиления; d где K коэффициент усиления; d  изменение отклонения направления движения от заданной величины; dt время изменения; S расстояние от точки касания почвы копировальным щупом трактора до плуга; V действительная скорость агрегата. Выход дифференциатора 7 соединен с механизмом 9 изменения ширины захвата плуга, который установлен на корпусе плуга. Оператор, управляя вручную автоматизированным агрегатом, делает первый проход по контуру поля выпуклой формы или части поля, опускает копирующий щуп в борозду и включает в работу устройство для автоматического вождения. Устройство работает следующим образом. При изменении направления следа предыдущего прохода копирующий щуп 1, отклоняясь от оси трактора, воздействует на чувствительную головку 2, которая выдает сигнал, пропорциональный углу отклонения щупа. Этот сигнал поступает в схему 3 управления направлением движения, которая связана с механизмом рулевого управления 4, а также в сумматор 5, где сравнивается с сигналом задатчика 6 допустимого угла изменения направления движения без изменения ширины захвата плуга, и результирующий сигнал поступает в дифференциатор 7 на изменение ширины захвата плуга, где с учетом сигнала датчика 8 действительной скорости движения агрегата и расстояния от копирующего щупа до плуга формируется сигнал на управление механизмом изменения ширины захвата плуга. Изменением ширины захвата плуга обеспечивается сглаживание криволинейных участков выпуклой траектории, устраняется накапливающая ошибка автомата вождения трактора, а также происходит защита корпусов плуга от поломки при резких изменениях направления движения. В случае, когда результирующий сигнал сумматора 5 не превышает значения зоны нечувствительности задатчика 6 допустимого угла изменения направления движения без изменения ширины захвата плуга к изменению направления движения, исполнительный механизм изменения ширины захвата плуга автоматически устанавливается в исходное положение. Таким образом, устройство для автоматического вождения сельскохозяйственного агрегата позволит водить агрегат по спирали, осуществляя обработку полей выпуклых форм или части поля выпуклой формы без разрыва технологического процесса. При этом производительность в сравнении с загонными способами движения увеличивается до 20% Кроме того, устраняются недостатки загонных способов, связанные, во-первых, с тем, что уплотнение почвы движителями тракторов и опорными колесами орудий и машин на поворотной полосе в 3.4 раза выше по сравнению с движением по спирали без разрыва технологического процесса, и, во-вторых, с тем, что на склонах поворотные полосы обрабатываются вдоль склона, что противоречит требованиям почвозащитной агротехники. При длине гонов 400-800 м площадь поворотной полосы 20 м составит 10-7% площади поля и эта часть поля, как правило, подвергается интенсивной линейной эрозии. изменение отклонения направления движения от заданной величины; dt время изменения; S расстояние от точки касания почвы копировальным щупом трактора до плуга; V действительная скорость агрегата. Выход дифференциатора 7 соединен с механизмом 9 изменения ширины захвата плуга, который установлен на корпусе плуга. Оператор, управляя вручную автоматизированным агрегатом, делает первый проход по контуру поля выпуклой формы или части поля, опускает копирующий щуп в борозду и включает в работу устройство для автоматического вождения. Устройство работает следующим образом. При изменении направления следа предыдущего прохода копирующий щуп 1, отклоняясь от оси трактора, воздействует на чувствительную головку 2, которая выдает сигнал, пропорциональный углу отклонения щупа. Этот сигнал поступает в схему 3 управления направлением движения, которая связана с механизмом рулевого управления 4, а также в сумматор 5, где сравнивается с сигналом задатчика 6 допустимого угла изменения направления движения без изменения ширины захвата плуга, и результирующий сигнал поступает в дифференциатор 7 на изменение ширины захвата плуга, где с учетом сигнала датчика 8 действительной скорости движения агрегата и расстояния от копирующего щупа до плуга формируется сигнал на управление механизмом изменения ширины захвата плуга. Изменением ширины захвата плуга обеспечивается сглаживание криволинейных участков выпуклой траектории, устраняется накапливающая ошибка автомата вождения трактора, а также происходит защита корпусов плуга от поломки при резких изменениях направления движения. В случае, когда результирующий сигнал сумматора 5 не превышает значения зоны нечувствительности задатчика 6 допустимого угла изменения направления движения без изменения ширины захвата плуга к изменению направления движения, исполнительный механизм изменения ширины захвата плуга автоматически устанавливается в исходное положение. Таким образом, устройство для автоматического вождения сельскохозяйственного агрегата позволит водить агрегат по спирали, осуществляя обработку полей выпуклых форм или части поля выпуклой формы без разрыва технологического процесса. При этом производительность в сравнении с загонными способами движения увеличивается до 20% Кроме того, устраняются недостатки загонных способов, связанные, во-первых, с тем, что уплотнение почвы движителями тракторов и опорными колесами орудий и машин на поворотной полосе в 3.4 раза выше по сравнению с движением по спирали без разрыва технологического процесса, и, во-вторых, с тем, что на склонах поворотные полосы обрабатываются вдоль склона, что противоречит требованиям почвозащитной агротехники. При длине гонов 400-800 м площадь поворотной полосы 20 м составит 10-7% площади поля и эта часть поля, как правило, подвергается интенсивной линейной эрозии.
Формула изобретенияУСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА, включающее соединенные последовательно копирующий щуп, чувствительную головку, схему управления направлением движения и механизм рулевого управления, отличающееся тем, что оно снабжено сумматором, задатчиком допустимого угла изменения направления движения агрегата без изменения ширины захвата плуга, дифференциатором сигнала команд на изменение ширины захвата плуга, датчиком действительной скорости движения агрегата и механизмом изменения ширины захвата плуга, при этом второй выход чувствительной головки соединен с первым входом сумматора, второй вход которого связан с задатчиком допустимого угла изменения направления движения агрегата без изменения ширины захвата плуга, а выход подключен к первому входу дифференциатора сигнала команд на изменение ширины захвата плуга, второй вход которого соединен с выходом датчика действительной скорости движения агрегата, а выход связан с механизмом изменения ширины захвата плуга.MM4A Досрочное прекращение действия патента Российской Федерации на изобретение из-за неуплаты в установленный срок пошлины за поддержание патента в силе Номер и год публикации бюллетеня: 24-2000 Извещение опубликовано: 27.08.2000 Популярные патенты: 2267897 Высевающий аппарат ... передачей. Ведущий барабан транспортера установлен над семяпроводом. Поверхности ведущего, обводного и натяжного барабанов армированы фрикционным материалом. Аппарат обеспечит равномерный однозерновой вынос семян из семенного ящика и их подачу в семяпровод. 4 з.п. ф-лы, 1 ил. Изобретение относится к сельскохозяйственному машиностроению, в частности к высевающим аппаратам для однозернового высева. Известен высевающий аппарат, включающий горизонтально расположенный ячеистый диск с отражателем семян, в котором с целью уменьшения повреждения семян при высеве отражатель семян выполнен в виде цилиндрической щетки с осью вращения, перпендикулярной оси вращения диска, закрытой в ... 2127256 Замещенные простые оксимовые эфиры и фунгицидное, инсектицидное, арахноицидное средство ... Lygus lineolaris, Lygus pratensis, Nezara viridula, Piesma quadrata, Solubea insularis, Thyanta perditor. Из отряда равнокрылых хоботных, например, Acyrthosiphon onobrychis, Adelges laricis, Aphidula nasturtii, Aphis fabae, Aphis pomi, Aphis sambuci, Brachycaudus cardui, Brevicoryne brassicae, Cerosipha gossypii, Dreyfusia nordmannianae, Dreyfusia piceae, Dyasphis radicola, Dysaulacorthum pseudosolani, Empoasca fabae, Macrosiphum avenae, Macrosiphum euphorbiae, Macrosiphon rosae, Meguora viciae, Metopolophium dirhodum, Myzodes persicae, Myzus cerasi, Nilaparvata lugens, Pemphigus bursarius, Perkinsella saccharicida, Phorodon humuli, Psylla mali, Psylla piri, Rhapalomyzus ... 2247490 Способ освоения закустаренных земель и устройство для его осуществления ... способа содержит базовый трактор, подъемный рабочий орган с двумя секциями дисковых батарей, передняя из которых смонтирована на раме, навешенной на трактор, а задняя - шарнирно соединена с рамой с возможностью подъема относительно нее. Впереди трактора на отдельной раме установлено с возможностью перемещения в вертикальной плоскости пригибающее устройство в виде отвала с обжимающей плитой, при этом отвал установлен перпендикулярно оптимальному направлению пригибания, а ширина его равна ширине захвата передней секции дисковой бороны.Кроме того, между трактором и передней секцией дисковой бороны на ее раме установлена обжимающая плита, ширина которой не менее ширины колеи между ... 2384052 Способ повышения эмбриональной жизнеспособности и естественной резистентности цыплят-бройлеров ... эмбрионального и постэмбрионального развития бройлеров, их резистентности и продуктивности: Дис. канд. вет. наук: 16.00.06. /Н.В.Брюшинин/ ФГОУ ВПО МГАВМиБ им. К.И.Скрябина. М., 2004. Приложение Таблица 1 Результаты исследований инкубационного яйца Партия яицМасса яиц, гИндекс формы, %Плотность яйца, г/см3 Содержание каратиноидов, мкг/г Содержание вит. А, мкг/г Высота воздушной камеры, мм Двухлинейный гибрид К39 60,3080 1,0907,85 7,219,3 Таблица 2 Схема обработок эксперимента Партия яиц Количество яиц, шт. Обработка яиц, % перед инкубацией при переводе на вывод контроль409 - -1 опытная 411 0,10,5 2 опытная 4160,1 0,553 опытная413 0,1 0,60 ... 2087614 Способ создания травяного газонного покрытия открытых спортивных площадок и ухода за ним ... в течение 3-4 дней. Для аэрации почвенного растительного слоя необходимо регулярно прокалывать образовавшуюся дернину катком-ежиком или специальным ручным дернопрокалывателем. Описанный способ осуществляется следующим образом. Первые работы по уходу начинаются после засеивания площадки. Ее необходимо огородить и исключить хождение по ней посторонних лиц. В первый месяц после засеивания работы по уходу ограничиваются ежедневным двухразовым поливом из поливальной автомашины, движущейся вокруг площадки по беговой дорожке. Полив нужно производить таким образом, чтобы вода попадала на почву в виде мелких распыленных капель. Ни в коем случае не сплошной струей, так как она может ... |
Еще из этого раздела: 2200377 Сельскохозяйственный агрегат 2415552 Питатель молотилки зерноуборочного комбайна 2494593 Способ повышения селена в чесноке горной зоны 2479996 Экологический комплекс для аквакультуры и рекультивации морских вод 2259707 Способ озеленения территорий многолетними декоративными древесными растениями 2470922 Сокристаллы 2487516 Почвообрабатывающая машина 2005344 Способ облучения живых организмов или растений 2180475 Устройство для поштучной подачи предметов, в частности семян сельскохозяйственных культур 2138949 Комбинированный препарат для борьбы с таежными и лесными клещами, способ борьбы и аттрактант |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||