Пространственный тестомесильный механизмПатент на изобретение №: 2305406 Автор: Дворников Леонид Трофимович (RU), Попугаев Максим Геннадьевич (RU) Патентообладатель: Государственное образовательное учреждение высшего профессионального образования "СИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ИНДУСТРИАЛЬНЫЙ УНИВЕРСИТЕТ" (ГОУ ВПО "СибГИУ") (RU) Дата публикации: 10 Сентября, 2007 Начало действия патента: 6 Марта, 2006 Адрес для переписки: 654007, Кемеровская обл., г. Новокузнецк, ул. Кирова, 42, СибГИУ, патентный отдел, Н.В. Галаниной Изображения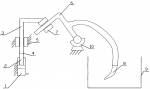 Изобретение относится к машиностроению, а конкретно к механизмам, используемым в пищевой промышленности. Пространственный тестомесильный механизм состоит из гидроцилиндра возвратно-поступательного действия и тестомесильной лапы. Поршень со штоком гидроцилиндра выполнен за одно целое с уголковым рычагом, входящим со стойкой и с пространственным коромыслом в цилиндрические кинематические пары (четвертого класса), а пространственное коромысло, жестко соединенное с лапой тестомесильного механизма, соединено со стойкой через сферическую кинематическую пару (третьего класса). Изобретение позволяет повысить качество перемешивания теста и упростить конструкцию механизма. 1 ил. Изобретение относится к машиностроению, а конкретно к механизмам, используемым в пищевой промышленности. Известен шарнирно-рычажный механизм мешалки, в том числе тестомесилки [1, стр.583, механизм №886], в котором лопасть мешалки скользит по дну сферической чаши. Недостатком этого механизма является необходимость использования двух приводов: привода для движения лопасти и привода для вращения чаши. Наиболее близким к предлагаемому механизму является четырехзвенный шарнирный механизм тестомесилки [1, стр.598, механизм №909], в котором точки лапы мешалки движутся по определенным траекториям внутри дежи (сосуда с тестом). Однако и этот механизм имеет существенный недостаток, заключающийся в том, что лапа мешалки может двигаться лишь в одной плоскости, а именно в плоскости вращения приводного кривошипа. Задачей настоящего изобретения является устранение отмеченного недостатка, что достигается тем, что лапе месилки задается пространственное движение внутри дежи (сосуда с тестом). Сущность предлагаемого пространственного тестомесильного механизма заключается в том, что предлагается пространственный трехзвенный тестомесильный механизм, включающий в себя гидроцилиндр возвратно-поступательного действия и тестомесильную лапу, в котором приводное звено в виде поршня со штоком гидроцилиндра выполняется за одно целое с уголковым рычагом, входящим со стойкой и с пространственным коромыслом в цилиндрические кинематические пары (четвертого класса), а пространственное коромысло, жестко соединенное с лапой тестомесильного механизма, соединяется со стойкой через сферическую кинематическую пару (третьего класса). Общий вид предлагаемого пространственного тестомесильного механизма показан на чертеже. Привод механизма состоит из гидроцилиндра 1 со штоком поршня 2, выполненным за одно целое с уголковым рычагом 3 с помощью жесткого соединения 4. Уголковый рычаг 3 входит со стойкой в цилиндрическую кинематическую пару (пару четвертого класса) 5 и с пространственным коромыслом 6 в цилиндрическую кинематическую пару 9 (пару четвертого класса) 7. Пространственное коромысло 6 жестко соединено с лапой тестомесителя 8, которая перемешивает тесто в дежи (сосуд с тестом) 9, соединено со стойкой через сферическую кинематическую пару (пару третьего класса) 10. Работает механизм следующим образом. При подаче рабочего агента (жидкости) в поршневую, а затем и в штоковую полости гидроцилиндра 1 поршень со штоком 2 получит возвратно-поступательное движение и через жесткое соединение 4 штока с уголковым рычагом 3 передаст движение последнему (уголковому рычагу), который начинает перемещаться относительно оси цилиндрической кинематической пары 5. При этом уголковый рычаг вместе со штоком и поршнем 2 гидроцилиндра 1 получит дополнительное вращательное движение вокруг геометрической оси гидроцилиндра. От уголкового рычага 3 через цилиндрическую кинематическую пару 7 получит движение пространственное коромысло 6, а с ним и лапа тестомесителя 8. Так как пространственное коромысло 6 соединено со стойкой через сферическую кинематическую пару 10, то и пространственное коромысло 6 и лапа 8 получат пространственное движение, а лапа 8 в дежи 9 будет перемешивать тесто во всех направлениях. Известно, что подвижность пространственных механизмов определяется по формуле Малышева А.П., имеющей вид [2, стр.35, формула (2, 4)] В этой формуле W означает скольким звеньям следует задать движение, чтобы все остальные звенья двигались вполне определенно; n - число подвижных звеньев; р 5, р4, р3, р2, p1 - число кинематических пар соответственно: р5 - пятого класса (одноподвижные), р4 - четвертого класса (двухподвижные), р3 - третьего класса (трехподвижные), р2 - второго класса (четырехподвижные) p1 - первого класса (пятиподвижные). В предлагаемом механизме число подвижных звеньев два - это уголковый рычаг 3, выполненный за одно целое с поршнем гидроцилиндра 1, и пространственное коромысло 6 совместно с лапой 8, т.е. n=2, а кинематических пар всего три - это две цилиндрические пары четвертого класса между уголковым рычагом 3 со стойкой (пара 5) и с пространственным коромыслом 6 (пара 7), а также пространственное коромысло 6 со стойкой (пара 10), т.е. р4 =2, р3=1. По формуле (1) по приведенным значениям получим W=62-42-31=1. Отсюда следует, что предлагаемый пространственный тестомесильный механизм вполне работоспособен. Источники информации 1. Артоболевский И.И. Механизмы современной техники, т 1. - М.: Машиностроение, 1970. 2. Артоболевский И.И. Теория механизмов и машин. - М.: Наука, 1975. 640 с. Формула изобретенияПространственный тестомесильный механизм, состоящий из гидроцилиндра возвратно-поступательного действия и тестомесильной лапы, при этом поршень со штоком гидроцилиндра выполнен за одно целое с уголковым рычагом, входящим со стойкой и с пространственным коромыслом в цилиндрические кинематические пары (четвертого класса), а пространственное коромысло, жестко соединенное с лапой тестомесильного механизма, соединено со стойкой через сферическую кинематическую пару (третьего класса). MM4A - Досрочное прекращение действия патента СССР или патента Российской Федерации на изобретение из-за неуплаты в установленный срок пошлины за поддержание патента в силе Дата прекращения действия патента: 07.03.2008 Извещение опубликовано: 10.11.2009 БИ: 31/2009 Популярные патенты: 2204241 Способ определения поливных норм при капельном орошении томатов ... ИЗОБРЕТЕНИЯ Способ определения поливной нормы при капельном орошении томатов, включающий инструментальное определение объемной массы почвы, величины пахотного слоя, глубины увлажнения, влажности слоя при наименьшей влагоемкости, предполивной влажности с коррективкой нормы полива с учетом выпавших осадков, отличающийся тем, что откалиброванную или эталонную капельницу с инструментально определенными характеристиками размещают на орошаемом участке установленного типа почвы и посредством нее определяют потребный объем водоподачи V = aвhkH(WH.B-WH.B), где V - объем водоподачи, м3; a - расстояние между капельницами, м; в - ширина полосы увлажнения, м; h - глубина ... 2285375 Способ обработки почвы и устройство для его осуществления ... агрегата по полю на каждом последующем поперечном участке глубину рыхления изменяют относительно предыдущего в пределах пахотного слоя. Устройство содержит раму, рабочие органы, опорное колесо и механизм изменения положения опорного колеса, причем механизм выполнен в виде четырехзвенника с возможностью изменения положения опорного колеса в вертикальной плоскости. Механизм состоит из горизонтального ползуна, соединенного с гидроцилиндром, и стойки с горизонтальным шарниром, соединенной шарнирно с ползуном при помощи промежуточного звена. Стойка установлена под углом к горизонтальной плоскости. Такие технология и конструкция позволят снизить энергоемкость обработки и обеспечить ... 2217912 Способ проведения контрольного лова молоди пелагических рыб, в частности лососевых, и обкидной невод ... лова молоди пелагических рыб, в частности лососевых и разработать такое орудие лова для осуществления этого способа, чтобы получить достоверные статистические данные по численности рыб, для оценки выживаемости разновозрастной молоди пелагических рыб, в частности лососевых. Поставленная задача решается тем, что в известном способе проведения контрольного лова молоди пелагических рыб, в частности лососевых, включающем учет реальных гидрометеорологических условий текущего года, физиологического состояния молоди, оконтуривание мест скопления рыбы, ежегодный контрольный облов по заданной стандартной сетке станций, расположенных от уреза воды и мористее, с использованием орудий ... 2193304 Захват лесозаготовительной машины ... по п. 1, отличающийся тем, что оси относительного качания качающегося рычага и рамы и приводного рычага и качающегося рычага совпадают. 3. Захват лесозаготовительной машины по п. 1, отличающийся тем, что имеет дополнительную ось качания, причем общая ось качания между приводным рычагом и качающимся рычагом расположена на расстоянии от дополнительной оси качания между качающимся рычагом и рамой. 4. Захват лесозаготовительной машины по п. 1, отличающийся тем, что упругий элемент пружины вращения расположен между смежными поверхностями элементов, охватывающих общую ось качания. 5. Захват лесозаготовительной машины по п. 4, отличающийся тем, что пружина вращения содержит наружную и ... 2141182 Культиватор ... к лавинообразному развитию теплолюбивых и многолетних сорняков. Буквально за 5-6 суток после выпадения осадков сорняки с плотностью 300-400 растений/м2 достигают высоты 0,6-1,1 м. Применение описанного почвообрабатывающего агрегата приводит к тому, что стебли сорняков лишь пригибаются и претерпевают незначительные повреждения, а вьюнок остается практически без каких-либо деформаций. При высоте стеблей сорняков в пределах 0,5-0,6 м упомянутое почвообрабатывающее орудие "всплывает" над поверхностью поля. Для увеличения эффективности механического уничтожения сорняков методом "вдавливания" требуется увеличить массу катка до 5-6 т, а при ширине захвата орудия 4 м только для его ... |
Еще из этого раздела: 2146444 Способ выявления и отбора стрессоустойчивых животных 2066320 Производные тиазола, способ их получения и способ борьбы с грибками 2080774 Способ изготовления брикетов для выращивания растений и устройство для его осуществления 2056755 Способ регулирования роста овощных культур 2450505 Порционное устройство для вытирания семян трав 2227965 Способ возделывания бахчевых культур и устройство для его осуществления 2112337 Рабочий орган культиватора 2406295 Способ экологического мониторинга лесов 2485762 Ракета для активного воздействия на облака 2259707 Способ озеленения территорий многолетними декоративными древесными растениями |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||