Способ управления агрегатом защиты растений при спутниковой навигации на сельскохозяйственных поляхПатент на изобретение №: 2492626 Автор: Альт Виктор Валентинович (RU), Нечаев Александр Иннокентьевич (RU) Патентообладатель: ГОСУДАРСТВЕННОЕ НАУЧНОЕ УЧРЕЖДЕНИЕ СИБИРСКИЙ ФИЗИКО-ТЕХНИЧЕСКИЙ ИНСТИТУТ АГРАРНЫХ ПРОБЛЕМ РОССИЙСКОЙ АКАДЕМИИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ НАУК (ГНУ СибФТИ Россельхозакадемии) (RU) Дата публикации: 20 Января, 2012 Начало действия патента: 13 Июля, 2010 Адрес для переписки: 630501, Новосибирская обл., Новосибирский р-н, п. Краснообск-1, а/я 468, ГНУ СибФТИ Россельхозакадемии Изображения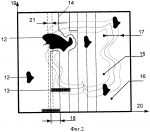 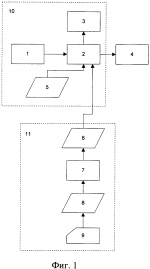   Изобретение относится к области сельского хозяйства. В способе управляют агрегатом защиты растений, состоящим из транспортного средства и опрыскивателя с форсунками для распыливания средства защиты. Управление движением агрегата защиты растений осуществляют с помощью бортового компьютера с навигационной системой в соответствии с введенными в бортовой компьютер координатами трассы. Управление опрыскиванием осуществляют включением форсунок опрыскивателя в необработанных участках поля. При этом управление опрыскиванием осуществляют включением форсунки опрыскивателя в необработанных зараженных участках поля, подлежащих опрыскиванию - зоны заражения. Управление агрегатом защиты растений, движением и выбором геометрии трассы движения, точностью позиционирования агрегата на трассе, длиной штанги, количеством форсунок на штанге, радиусом факела распыла форсунки, критерием включения форсунок и управление опрыскиванием осуществляют с минимальным значением экологического вреда и энергоресурсных затрат агрегата защиты растений, с учетом пространственного положения зон заражения и конфигурации поля при заданной точности навигации и системы определения географических координат. Способ способствует минимизации экологического вреда и энергоресурсных затрат эксплуатации агрегата защиты растений путем уменьшения длины трассы движения агрегата по участкам, включающим зоны заражения. 4 ил. Предлагаемое изобретение относится к области точного земледелия в сельском хозяйстве и может быть применено в области защиты растений. Известен способ управления агрегатом защиты растений, состоящий из транспортного средства и опрыскивателя, заключающийся в том, что движением агрегата защиты растений управляют с помощью бортового компьютера с навигационной спутниковой системой в соответствии с введенными в бортовой компьютер координатами трассы. Например, агрегаты и электронные системы фирмы John Deere, дисплей GS2 (см. URL:http://stellarsupport.deere.com/en_INT/pdfs/Russian/ompfp10244_е0_59_25_may10_RUS_GS2_Display_Basic_Applications.pdf, файл: ompfp10244_e0_59_25may10_RUS_GS2_Display_Basic_Applications.pdf. Дата публикации данного документа указана в его свойствах - 08.06.2011 г), Swath Control - дополнительный модуль системы GS2 Pro. Работает с распылителями JD Horst 700i, 800i и распылителем 5430i. Управление движением осуществляется системой AutoTrac. Система Swath Control Pro может автоматически включать и выключать машину и секции агрегата в зависимости от предыдущего фактического покрытия и границы (внешнюю, внутреннюю и внешнюю часть конца гона). Отличия от предложенного способа состоят в том, что управление опрыскиванием осуществляют в зависимости от ее нахождения в участках перекрытия гонов поля или обработанных/необработанных участках поля, а не в зависимости от ее нахождении в необработанных зараженных участках поля, подлежащих опрыскиванию (зоны заражения), а управление агрегатом защиты растений (движения и выбора геометрии трассы движения, точности позиционирования агрегата на трассе, длины штанги, количество форсунок на штанге, радиуса факела распыла форсунки, критерия включения форсунок) и управление опрыскиванием осуществляют без учета минимального значения экологического вреда, энергоресурсных затрат агрегата защиты растений, пространственного положения зон заражения и конфигурации поля опрыскиванием при заданной точности навигации и системы определения географических координат. При этом способе управления агрегатом защиты растений параметры экологического вреда (экологический вред определяется количеством вредных веществ, попавших в окружающую среду сверх нормативных показателей и пропорционален переопрыскиванию, зараженные участки с опрыскиванием более одного раза, недоопрыскиванию, необработанные зараженные участки, обработанным незараженным участкам) и параметры энергоресурсных затрат эксплуатации агрегата защиты растений (общая длина трассы, длина трассы холостых пробегов (прохождение одного и того же участка трассы без опрыскивания данного участка поля при неоднократном обходе препятствий или изгибов участка поля) имеют неоптимальные значения вследствие отсутствия выбора управления агрегатом защиты растений, т.е. движения и выбора геометрии трассы движения, точности позиционирования агрегата на трассе, длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки, критерия включения форсунок, и управления опрыскиванием от минимального значения экологического вреда, энергоресурсных затрат агрегата защиты растений, пространственного положения зон заражения и конфигурации поля при заданной точности навигации и системы определения географических координат. Это приводит к ухудшению экологии природы и увеличению энергоресурсных затрат эксплуатации агрегата защиты растений. Наиболее близким по технической сущности к предлагаемому способу (прототипом) является способ управления агрегатом защиты растений опрыскивателя, разработанный компанией Trimble (см. http://trl.trimble.com/docushare/dsweb/Get/Document-311632/, файл: 022503-078F-RUS_2011_Ag_Portfolio_BRO_1110_LR.pdf. Название документа: 2011 Trimble Agriculture Product Portfolio - Russian version. Дата публикации данного документа указана в его свойствах - 25.03.2011 г.), состоящим из транспортного агрегата и опрыскивателя, заключающийся в том, что движением агрегата защиты растений управляют с помощью бортового компьютера с навигационной спутниковой системой (дисплей CFX-750 При этом способе управления агрегатом защиты растений параметры экологического вреда и энергоресурсных затрат агрегата защиты растений так же имеют неоптимальные значения вследствие отсутствия выбора управления агрегатом защиты растений, т.е. выбора геометрии трассы движения, точности позиционирования агрегата на трассе, длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки, критерия включения форсунок, и управления опрыскиванием от минимального значения экологического вреда, энергоресурсных затрат агрегата защиты растений, пространственного положения зон заражения и конфигурации поля при заданной точности навигации и системы определения географических координат. Это приводит к ухудшению экологии природы и увеличению энергоресурсных затрат эксплуатации агрегата защиты растений. Сущность изобретения заключается в том, что управление опрыскиванием осуществляют включением форсунки опрыскивателя в необработанных зараженных участках поля, подлежащих опрыскиванию (зоны заражения), управление агрегатом защиты растений (движения и выбора геометрии трассы движения, точности позиционирования агрегата на трассе, длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки, критерия включения форсунок), управление опрыскиванием осуществляют для минимального значения экологического вреда, энергоресурсных затрат агрегата защиты растений, с учетом пространственного положения зон заражения и конфигурации поля при заданной точности навигации и системы определения географических координат. Это достигается тем, что управление опрыскиванием (включением форсунки опрыскивателя в необработанных зараженных участках поля, подлежащих опрыскиванию (зоны заражения), управление агрегатом защиты растений (движения и выбора геометрии трассы движения, точности позиционирования агрегата на трассе, длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки, критерия включения форсунок) при заданной точности навигации и системы определения географических координат определяют при расчете на ЭВМ по цифровой модели поля с нанесенными на нее географическими координатами поля, препятствий и зон заражения минимального значения экологического вреда и энергоресурсных затрат эксплуатации агрегата защиты растений при варьировании геометрии трассы движения, точности позиционирования агрегата на трассе, длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки, критерия включения форсунок с учетом пространственного положения зон заражения и конфигурации поля, точности определения географических координат поля, объектов-препятствий и зон заражения, точности навигации Определенные параметры управления агрегатом защиты растений (геометрии трассы движения, точности позиционирования агрегата на трассе, длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки, критерия включения форсунок) для минимального значения экологического вреда и энергоресурсных затрат эксплуатации агрегата защиты растений определяют тип транспортного средства и опрыскивателя с определенной точностью позиционирования агрегата на трассе, длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки. Массив координат трассы и координаты включения каждой форсунки опрыскивателя вводят в бортовой компьютер для управления перемещением агрегата и работой опрыскивателя на поле при его навигации (включением форсунок опрыскивателя, если она находится над обработанным участком зоны заражения). При этом пределы изменения трассы на поле определяются границами зон заражения, а не всего поля. Технический результат, объективно проявляющийся при осуществлении способа, заключается в минимизации экологического вреда (воздействия ядохимикатов средств защиты растений на окружающую среду) и энергоресурсных затрат эксплуатации агрегата защиты растений (уменьшения длины трассы движения агрегата по участкам, включающим зоны заражения, т.к. в этом случае нет необходимости его движения по незараженным участкам поля, и длины трассы холостого хода) за счет выбора типа транспортного средства и опрыскивателя с определенной точностью позиционирования агрегата на трассе, длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки, геометрии трассы движения и управления форсунками опрыскивателя (нанесения препарата защиты растений только в пределах зоны заражения), определяемых при расчете минимального значения экологического вреда и энергоресурсных затрат эксплуатации агрегата защиты растений. На фиг.1 изображено устройство для реализации способа управления агрегатом защиты растений при спутниковой навигации на сельскохозяйственных полях. Устройство состоит из транспортного агрегата, опрыскивателя, блока расчета трассы. Транспортный агрегат 10 состоит из GPS приемника спутниковых координат 1, бортового компьютера 2, устройства управления движением агрегата 3, программы бортового компьютера управления движением агрегата по расчетной трассе 5. Опрыскиватель 4 состоит из штанги с форсунками распыливания средства защиты растений с управлением включением/отключением по сигналам бортового компьютера агрегата. Блок расчета трассы 11 состоит из универсальной ЭВМ 7, программы расчета трассы 8, цифровой модели поля 9, массива данных 6 координат GPS трассы и координат включения форсунок опрыскивателя 4. На Фиг.2 изображена цифровая модель сельскохозяйственного поля для расчета трассы агрегата с опрыскивателем для защиты растений, включающая препятствия движению агрегата 12, агрегат 13 со штанговым опрыскивателем, трассу транспорта агрегата 14 в виде прямолинейных гонов с шагом Способ управления агрегатом защиты растений при спутниковой навигации на сельскохозяйственных полях реализуется следующим образом, фиг.1 - фиг.2: транспортный агрегат 10 принимает сигналы спутниковой навигации посредством GPS приемника 1, которые вводятся в бортовой компьютер 2. Бортовой компьютер 2 в соответствии с заложенной программой 5 в ходе движения минимизирует отклонение текущих спутниковых координат от координат трассы в текущей точке его положения путем управления направлением движения с помощью устройства управления движением агрегата 3 и управляет включением форсунок опрыскивателя 4 в соответствии с введенным в бортовой компьютер массивом координат 6 форсунок опрыскивателя 4. Параметры агрегата защиты растений, массив координат трассы и массив данных управления форсунками опрыскивателя рассчитываются заранее в блоке расчета трассы 11 на универсальной ЭВМ 7 программой расчета трассы 8 по цифровой модели поля 9, содержащей препятствия 12 и зону заражения 15. Параметры агрегата защиты растений, трассу движения агрегата и управление включением форсунок выбирают для минимального значения экологического вреда и энергоресурсных затрат эксплуатации агрегата защиты растений. Для этого рассчитывают программой расчета трассы 8 по цифровой модели поля 9, содержащей препятствия 12 и зону заражения 15, значения экологического вреда и энергоресурсных затрат эксплуатации агрегата защиты растений при варьировании геометрии трассы с учетом пространственного положения зон заражения и конфигурации поля, точности определения координат поля, объектов-препятствий и зон заражения, точности навигации, параметров опрыскивателя (длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки, критерия включения форсунки), точности позиционирования агрегата на трассе. При этом пределы изменения трассы на поле определяются границами зон заражения, а не всего поля. Экологический вред пропорционален площадям опрыскивания: s1 - опрыскивание здоровой зоны, s2 - переопрыскивание здоровой зоны, s3 - опрыскивание зараженной зоны, s4 - переопрыскивание зараженной зоны, s5 - недоопрыскивания зараженной зоны. Экологический вред определится как величина s6, пропорциональная площади поля, обработанного ядохимикатом:
Коэффициент качества технологической обработки, равный отношению обработанной и полной площадей зоны заражения sz:
Коэффициент экологического вреда, равный отношению площади обработанной зоны заражения к полной площади опрыскивания: В общем случае максимальные энергоресурсные затраты агрегата Еао определяются суммой длины трассы агрегата на поле однократного прохода - Lo, разворотов на границе поля и на повторный обход объектов и выступов границ поля - Lxx при их затратах на единицу длины пути и длины штанги опрыскивателя k*LS Коэффициент энергоресурсных затраты агрегата Kэн равен отношению полезных энергоресурсных затрат Lo к общим затратам
Определим качество опрыскивания Копр как мультипликативную оценку:
или Для фиксированной длины штанги LS Копр представляет поверхность в варьируемых координатах. Значения Копр вычисляются программой расчета трассы 8 по цифровой модели поля 9, содержащей препятствия 12 и зону заражения 15, для заданных исходных параметров. Параметры агрегата защиты растений, длина штанги, количество форсунок на штанге, радиус факела распыла форсунки, критерий включения форсунки, геометрия трассы движения, координаты включения форсунок определяются точкой поверхности с максимальным значением Копр. Массив координат трассы и управления опрыскивателем вводятся в бортовой компьютер агрегата для управления работой при движении по трассе. Формула изобретенияСпособ управления агрегатом защиты растений, состоящим из транспортного средства и опрыскивателя с форсунками для распыливания средства защиты, заключающийся в том, что управление движением агрегата защиты растений осуществляют с помощью бортового компьютера с навигационной системой в соответствии с введенными в бортовой компьютер координатами трассы, а управление опрыскиванием осуществляют включением форсунок опрыскивателя в необработанных участках поля, отличающийся тем, что управление опрыскиванием осуществляют включением форсунки опрыскивателя в необработанных зараженных участках поля, подлежащих опрыскиванию, - зоны заражения, а управление агрегатом защиты растений, движением и выбором геометрии трассы движения, точностью позиционирования агрегата на трассе, длиной штанги, количеством форсунок на штанге, радиусом факела распыла форсунки, критерием включения форсунок и управление опрыскиванием осуществляют с минимальным значением экологического вреда и энергоресурсных затрат агрегата защиты растений, с учетом пространственного положения зон заражения и конфигурации поля при заданной точности навигации и системы определения географических координат. Популярные патенты: 2175177 Агромост с оснасткой для прокладки и уплотнения постоянных грунтовых колей ... них имеет два разнесенные по диаметрам катков отверстия, запирающиеся пробками 19 с резьбой. Катки смонтированы на плитах 20, которые, с возможностью быстрого демонтажа, закреплены винтами на неработающих сторонах направляющих 21. Катки закреплены через рамы 22, одни стороны которых шарнирами 23 закреплены на плитах 20, а другими сторонами скреплены шарнирно со штоками 24 винтовых домкратов 12. Рамы имеют прорези 25, которые во время качения катков по колеям позволяют им перемещаться в вертикальной плоскости. Гусеницы каждой самоходной тележки 2 с помощью поворотных кругов 4 могут развертываться через цепи 26 от мотор-редукторов 27, при этом тележки приподнимаются домкратами 28, ... 2120753 Способ получения пестицидного водного суспензионного концентрата и пестицидный водный суспензионный концентрат ... album), горец (Polygonum aviculare) и тому подобное. Гербициды для послевсходовой обработки обычно используют в форме эмульгируемых концентратов, смачиваемых порошков, суспензионных концентратов и тому подобного. Так, в частности, заметное гербицидное действие проявляют эмульгируемые концентраты. Однако при приготовлении эмульгируемого концентрата обязательным является подмешивание органического растворителя, вследствие чего эмульгируемым концентратом свойственны такие недостатки, как нежелательное воздействие на окружающую среду и вредное действие на здоровье потребителей. Более того, эмульгируемые концентраты проявляют заметное биологическое действие и, следовательно, часто ... 2415542 Пневматический высевающий аппарат ... валу которого установлена центральная резиновая ворошилка, а в нижней части корпуса установлен сбрасыватель-направитель семян, состоящий из корпуса, выполненного в форме полого цилиндра с шарнирно прикрепленным к нему сбрасывателем, причем корпус сбрасывателя-направителя установлен таким образом, что сбрасыватель расположен в зоне сбрасывания семян и примыкает к торцевой поверхности высевающего диска, при этом сбрасыватель выполнен с возможностью изменения угла наклона к горизонту, а к нижней части корпуса сбрасывателя-направителя прикреплен направитель семян, который выполнен в форме желоба, изогнутого по дуге в направлении, противоположном направлению движения высевающего ... 2119738 Орудие для уборки грубых кормов ... верхней вертикальной части 2 задней стенки 1; h - высота вертикальной части 2 задней стенки 1; h1 - высота подбирающего элемента задней стенки 1; h2 - высота расположения нижней части наклонной направляющей 3 задней стенки 1 от нижнего конца подбирающего элемента задней стенки 1; 1- угол наклона подбирающего элемента 4 задней стенки 1 к горизонту; 2- угол наклона направляющей 3 задней стенки 1 к горизонту. Боковые стенки 28 шарнирно крепятся на стойке 29 и в рабочем положении фиксируются съемными укосинами 30. Для навешивания орудия на энергетическое средство служат кронштейны 31, 32, расположенные на верхнем брусе 7 и нижнем 6, или быстросоединяющее сцепное устройство 33. Для ... 2199195 Мостовая сельскохозяйственная платформа "сотка" ... платформы закреплена большая звездочка трансмиссионной передачи с возможностью зацепления с малой звездочкой на валу съемного двигателя при работе на уклонах. В целом конструкция платформ, вес, размеры, путевая структура становятся приемлемыми для использования мостовой сельскохозяйственной платформы на земельных участках до 1 га, включая "сотки". Назначение изобретения - максимальное упрощение конструкций мостовой платформы и путевой структуры, уменьшение веса и габарита агрегата. Некоторая механизация на клубничных плантациях повысит производительность труда. Чертежи: фиг.1 - общий вид; фиг.2 - вид в плане. Мостовая сельскохозяйственная платформа включает прямоугольную раму 1, ... |
Еще из этого раздела: 2157612 Способ уборки корней растений, преимущественно лакрицы, и устройство для его осуществления 2025945 Способ выращивания насаждений сосны 2265314 Устройство системы зашторивания теплиц с регулируемым ходом 2204241 Способ определения поливных норм при капельном орошении томатов 2216903 Устройство для отделения плодов от ветвей 2078495 Устройство для транспортирования кормов в хранилищах башенного типа 2188534 Способ уборки льна-долгунца 2454055 Устройство для ротационного внутрипочвенного рыхления с механическим приводом 2086081 Рабочий орган культиватора 2233582 Устройство для охлаждения молока |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||
 параллельного вождения и точного земледелия, подруливающее устройство Trimble® EZ-Steer®, GPS приемник, система контроля внесения материалов FIELD-IQ), а управление опрыскивателем осуществляют включением/выключением секций с помощью системы контроля внесения материалов FIELD-IQ, отличающийся от предложенного способа тем, что управление опрыскиванием осуществляют включением форсунок опрыскивателя в участках поля, подлежащих опрыскиванию, а не в необработанных зараженных участках поля, подлежащих опрыскиванию (зоны заражения), а управление агрегатом защиты растений (движения и выбора геометрии трассы движения, точности позиционирования агрегата на трассе, длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки, критерия включения форсунок) и управление опрыскиванием осуществляют без учета минимального значения экологического вреда, энергоресурсных затрат агрегата защиты растений, пространственного положения зон заражения и конфигурации поля опрыскиванием при заданной точности навигации и системы определения географических координат
параллельного вождения и точного земледелия, подруливающее устройство Trimble® EZ-Steer®, GPS приемник, система контроля внесения материалов FIELD-IQ), а управление опрыскивателем осуществляют включением/выключением секций с помощью системы контроля внесения материалов FIELD-IQ, отличающийся от предложенного способа тем, что управление опрыскиванием осуществляют включением форсунок опрыскивателя в участках поля, подлежащих опрыскиванию, а не в необработанных зараженных участках поля, подлежащих опрыскиванию (зоны заражения), а управление агрегатом защиты растений (движения и выбора геометрии трассы движения, точности позиционирования агрегата на трассе, длины штанги, количества форсунок на штанге, радиуса факела распыла форсунки, критерия включения форсунок) и управление опрыскиванием осуществляют без учета минимального значения экологического вреда, энергоресурсных затрат агрегата защиты растений, пространственного положения зон заражения и конфигурации поля опрыскиванием при заданной точности навигации и системы определения географических координат I 18 и ошибкой позиционирования агрегата относительно расчетной трассы
I 18 и ошибкой позиционирования агрегата относительно расчетной трассы 





