Сельскохозяйственный роботПатент на изобретение №: 2492620 Автор: Хамуков Юрий Хабижевич (RU), Нагоев Залимхан Вячеславович (RU), Анчёков Мурат Инусович (RU), Ахметов Руслан Хасанович (RU) Патентообладатель: Учреждение Российской академии наук Институт Информатики и проблем регионального управления Кабардино-Балкарского научного центра РАН (RU) Дата публикации: 20 Декабря, 2012 Начало действия патента: 8 Июня, 2011 Адрес для переписки: 360000, КБР, г.Нальчик, ул. И. Арманд, 37а, ИИПРУ КБНЦ РАН Изображения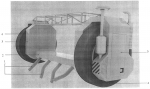 Сельскохозяйственный робот содержит каретки с агрегатными отсеками, навигационным оборудованием и устройством управления роботом, а также соединяющую каретки платформу со связанными с устройством управления роботом сканерами, рабочими органами для воздействия на почву и на посадки и сбора продукции и транспортером для перемещения продукции от рабочих органов к агрегатным отсекам. Платформа выполнена сборной из унифицированных производственных и/или транспортных секций. Производственные секции снабжены рабочими органами, транспортером продукции и встроенными элементами электрической, пневматической и/или гидравлической системы робота. Рабочие органы представляют собой очувствленные посредством сенсоров положения многозвенные манипуляторы с числом степеней подвижности не меньше шести. Транспортные секции снабжены устройствами погрузки-выгрузки и обработки продукции. Удельное давление эластичных беговых частей шин колес ниже порога устойчивости посадок к вытаптыванию. Конструкции кареток модулей робота обеспечивают перемещение движителей в полном кинематическом соответствии с передвижением модулей по посадкам, что не приводит к сдвиговым деформациям почвы и образованию колеи и не сопровождается необратимым повреждением посадок и продукции. 10 з.п. ф-лы, 1 ил. Изобретение относится к робототехнике и предназначено для использования в производстве сельскохозяйственной продукции, главным образом для обработки посадок и уборки бахчевых овощных культур с наземными плодами. Известны самоходные аппараты для обработки почвы и посадок и сбора продукции, включающие каретки с приводимыми от двигателя колесными движителями, агрегатным отсеком или отсеками с устройствами для обработки и упаковки продукции, устройством управления агрегатом и навигационным оборудованием, и соединяющую каретки платформу с устройствами для воздействия на почву и на посадки и сбора продукции и с транспортером для перемещения продукции в агрегатные отсеки. Наиболее близким к заявленному изобретению по конструкции и назначению является шведский мостовой комбайн BIOTRAC [1]. В этом комбайне платформа с рабочими органами расположена между двумя двухколесными каретками, на одной из которых расположен двигатель, а на другой расположены кабина для водителя и устройства управления агрегатами комбайна. Данный прототип позволяет уменьшить площадь уплотняемого колесами грунта, ориентировать комбайн относительно границ обрабатываемого участка с помощью навигационного оборудования и обеспечивать точное позиционирование рабочих органов по отношению к посадкам. Недостатками комбайна BIOTRAC являются: цельная платформа, не позволяющая менять расстояние между каретками; неспособность к автономному режиму обследования посадок и выполнению сложных действий с ними; неспособность к отделению сочноплодной продукции и перемещению ее в платформу; высокое удельное давление колес на грунт, превышающее порог устойчивости посадок к вытаптыванию. Техническим результатом является: обеспечение возможности изменения длины платформы аппарата, автономизация выполнения рабочих операций по воздействию на посадки, отделению продукции и перемещению ее в агрегатные отсеки, снижение удельного давления колес аппарата на грунт ниже порога устойчивости посадок к вытаптыванию. Указанный технический результат достигается тем, что в сельскохозяйственном роботе, состоящем из двух кареток с приводимыми от двигателя колесами, агрегатными отсеками с устройствами для обработки и упаковки продукции, навигационным оборудованием и устройством управления роботом, и соединяющей каретки платформы со связанными проводным или беспроводным способом с устройством управления роботом оптическими, микроволновыми и/или инфракрасными, ультрафиолетовыми, ультразвуковыми сканерами, рабочими органами для воздействия на почву и на посадки и сбора продукции и транспортером для перемещения продукции от рабочих органов к агрегатным отсекам, согласно изобретению платформа выполнена сборной из унифицированных производственных и/или транспортных секций (отсеков), причем производственные секции снабжены рабочим органом или органами, транспортером продукции и встроенными элементами электрической, пневматической и/или гидравлической системы робота, а рабочие органы представляют собой очувствленные посредством сенсоров положения многозвенные манипуляторы с числом степеней подвижности не меньше шести, а транспортные секции снабжены устройствами погрузки-выгрузки и обработки продукции. Каретки выполнены одноколесными, а центр масс робота расположен ниже оси вращения колес. Несущая конструкция кареток робота обладает дополнительно внутренней степенью подвижности в виде возможности перемещения центра масс робота относительно оси вращения колес и снабжена устройством, перемещающим центр масс робота относительно оси вращения колес в соответствии с изменениями динамических режимов движения робота и результирующего статического момента манипуляторов, определяемого устройством управления по данным сенсоров положения манипуляторов. Манипуляторы выполнены по схеме «хобот» и представляют собой трубчатую конструкцию, в стенку которой встроены соединенные через одну и образующие две группы из четных и нечетных номеров кольцевые эластичные камеры, а внутренний слой стенки образован эластичным шлангом с обращенным внутрь шланга щетинообразным ворсом из расположенных наклонно к основанию упругих волокон, а группы кольцевых камер с четными и нечетными номерами присоединены к пневматической системе робота посредством автоматического переключателя, подающего давление поочередно в разные группы. Излучающие и приемные элементы сканеров расположены на оконечной части манипуляторов. На оконечной части манипуляторов расположены секаторы, управляемые от устройства управления роботом или от отдельного индикатора положения продукции относительно манипулятора. Транспортер продукции выполнен в виде приводимого от электромеханического, пьезомеханического, гидравлического или пневматического вибратора лотка с обращенным в его полость щетинообразным ворсом из расположенных наклонно к основанию упругих волокон. Колеса кареток имеют широкопрофильные пневматические шины с высокоэластичной беговой частью и размером, обеспечивающим нагрузочную способность колеса при 30%-ной деформации шины при избыточном давлении воздуха в шине порядка 7 кПа, а крепление колес на двухколесных каретках обладает дополнительной угловой подвижностью в горизонтальной плоскости для обеспечения полного кинематического соответствия перемещения колес робота во всех режимах движения. Устройство управления роботом выполнено в виде оснащенного сенсорами компьютеризованного комплекса с установленной на нем самообучающейся программой обработки данных сенсоров и восстановления пространственного динамического образа внешней среды и адаптивной системы управления движением аппарата и индивидуальными и совместными действиями манипуляторов. Робот выполнен мультиагентным с коллективным выполнением действий автономными мостовыми модулями и с разделением функций по обработке посадок и сбору продукции модулями-комбайнами с платформами из производственных секций и транспортировке продукции за пределы посадок модулями-транспортировщиками с платформами из транспортных секций. Устройства управления положением манипуляторов типа «хобот» снабжены вибраторами. На чертеже представлен общий вид комбайна, содержащего манипуляторы 1, отдельные производственные секции платформы 2, каретки с агрегатными отсеками 3, колеса кареток с широкопрофильными шинами низкого давления 4. Самоходный аппарат для воздействия на почву и посадки и сбора продукции выполняют в виде роботизированного мостового комбайна со сборной платформой из унифицированных транспортных и производительных секций с встроенными в них элементами электрической и/или пневматической и гидравлической систем робота, с расположенными на транспортных секциях устройствами для приемки продукции из агрегатных отсеков комбайна и/или погрузки выгруженной из агрегатных отсеков продукции и расположенными на производительных секциях многозвенными манипуляторами с сенсорами положения и с числом степеней подвижности не менее шести и с расположенными на оконечных частях манипуляторов оптическими, микроволновыми и/или ультразвуковыми, инфракрасными и ультрафиолетовыми сканерами и лучевым или электромеханическим, или гидромеханическим, или пневмомеханическим секатором, управляемым сигналами устройства управления аппарата или специального индикатора положения продукции относительно манипулятора. Для повышения эффективности манипуляторы могут быть выполнены по схеме «хобот» в виде многослойной трубчатой конструкции, в стенку которой встроены кольцевые эластичные камеры, соединенные через одну и образующие две группы из четных и нечетных камер, а внутренний слой образован эластичным шлангом с обращенным внутрь шланга щетинообразным ворсом из расположенных наклонно к основанию упругих волокон. Группы четных и нечетных кольцевых камер присоединяют к пневматической системе аппарата посредством автоматического переключателя, поочередно подающего давление в четные и нечетные кольцевые камеры. Активация ворсистого покрытия внутренней полости «хобота» может осуществляться также посредством встроенного в устройство управления положением манипулятора или отдельного вибратора с электро- или пневмомеханическим приводом. На оконечностях манипуляторов на месте сканеров могут быть установлены только излучающие и принимающие элементы сканеров. Для выполнения совместных действий манипуляторов их рабочие зоны могут перекрываться. Также на производственных секциях устанавливают транспортеры для перемещения продукции от рабочего органа в соседнюю секцию или в агрегатный отсек комбайна. Транспортеры могут быть выполнены в виде приводимого от электро-, пневмо-, гидро -или пьезомеханических вибраторов лотка с обращенным в его полость щетинообразным ворсом из расположенных наклонно к основанию упругих волокон. Колеса кареток комбайна выполняют с шинами в виде широкопрофильных катков большого диаметра с высокоэластичной беговой частью, обеспечивающих при давлении не выше 7 кПа и 30%-ной деформации сохранность или минимальное повреждение стеблей, листьев, почек возобновления и плодов посадок. Нагрузочная способность колес обеспечивается за счет больших диаметра и профиля шин. Привод колес кареток может быть выполнен посредством механической, электромеханической, гидравлической или пневматической трансмиссии. С целью обеспечения полного кинематического соответствия движения колес кареток они могут быть выполнены в одноколесном варианте с расположенным ниже оси колес центром масс комбайна или в двухколесном варианте велосипедной компоновки с дополнительной подвижностью крепления колес в горизонтальной плоскости. С целью обеспечения стабилизации ориентации платформы относительно посадок конструкция комбайна с одноколесными каретками может быть выполнена с дополнительной внутренней степенью подвижности в виде возможности смещения положения центра масс комбайна относительно оси вращения колес, для чего конструкция снабжается устройством перемещения платформы и/или массивных элементов кареток в соответствии с динамическим режимом движения комбайна и результирующим статическим моментом на манипуляторах. Для достижения высокой степени автономизации и повышения коэффициента технического использования комбайна устройство управления комбайна выполняют в виде компьютеризованного комплекса, оснащенного программами обработки данных сенсоров и сканеров и программами манипулирования потоками сельскохозяйственной продукции, в том числе транспортировкой, упаковкой, погрузкой и выгрузкой продукции, а исполнительные устройства применяют в пыле- и влагозащитном исполнении. Для обработки посадок большой протяженности сельскохозяйственный робот выполняют мультиагентным с коллективным принятием решений по выполнению производственной задачи и разделением функций по сбору продукции и транспортировке ее за пределы посадок между автономными мостовыми модулями-комбайнами и автономными мостовыми модулями-транспортировщиками продукции, платформы которых состоят из транспортных секций. Работает аппарат следующим образом: робот в виде комплекта из кареток и производственных и, при надобности, транспортных секций доставляют на отдельном транспортном средстве или робот своим ходом в виде мостового комбайна с шириной, соответствующей пропускной способности дорог, и с нагруженными на платформу комбайна или на дополнительный прицеп дополнительными секциями прибывает под управлением оператора на границу обрабатываемого участка посадок, в устройство управления загружают план расположения посадок и задание, из кареток и дополнительных секций собирают соответствующую заданию и характеру посадок конфигурацию робота и приводят робот в рабочее состояние. Далее мостовой комбайн робота в автономном режиме с помощью навигационного устройства ориентируется относительно расположения участка посадок и перемещается по участку, осуществляя указанное в задании воздействие на посадки. Сенсоры и сканеры на манипуляторах комбайна передают в устройство управления комбайна сведения о положении манипуляторов и о состоянии посадок в зоне сканирования. Устройство управления воссоздает пространственный образ структуры посадок в зоне досягаемости манипуляторов и в соответствии с заданием вырабатывает управляющие сигналы на устройство управления манипуляторами и на устройство управления движением комбайна. При выполнении уборки продукции устройство управления комбайна ориентирует оконечные части манипуляторов в гуще посадок относительно плодоовощей и индивидуальными и/или совместными действиями манипуляторов приводит в контакт с плодоовощами. Под воздействием периодических повышений давления в кольцевых камерах наклонные упругие волокна щетинообразного ворса на внутренней оболочке «хобота» создают периодические однонаправленные толчки на плодоовощ, вследствие чего он перемещается в полость «хобота». При занятии плодом конструктивно определенного положения в полости манипулятора секатор отсекает плодоножку и плод продолжает перемещение внутри «хобота» и подается на транспортер в секции платформы, который перемещает плод на транспортер соседней секции, и далее до агрегатного отсека комбайна. В агрегатном отсеке продукция обрабатывается, при необходимости, или сразу подается в дозатор упаковочного устройства и затем в бункер-накопитель. При достижении комбайном границы участка агрегатный отсек комбайна выгружает упаковки с продукцией, комбайн разворачивается поворотом относительно центра опоры одной из кареток и продолжает выполнение задания. Для сбора продукции на участках большой протяженности из кареток и транспортных секций собирают дополнительно мостовые транспортные модули и устанавливают в устройство управления робота программу работы в мультиагентном режиме. В процессе выполнения задачи транспортные модули совместно с модулями-комбайнами робота принимают решения о перемещении к модулю-комбайну с заполненным бункером-накопителем или перемещении к месту выгрузки продукции, загружают продукцию в транспортную секцию или секции и переправляют ее за пределы посадок. Вследствие того, что удельное давление эластичных беговых частей шин колес ниже порога устойчивости посадок к вытаптыванию, а заявленные конструкции кареток обеспечивают движение в полном кинематическом соответствии, перемещение модулей робота по посадкам не приводит к образованию колеи и не сопровождается необратимым повреждением посадок и продукции. Критерии выбора продукции определенного вида или качества задают различными наборами типов сканеров на манипуляторах и адаптивным режимом работы устройства управления с функцией распознавания продукции. Применение мостовых роботизированных комбайнов в качестве замены или дополнения к существующим тракторным и комбайновым системам приведет к повышению урожайности посадок вследствие того, что уменьшится площадь следов машин на участках посадок, уменьшится повреждаемость посадок, повысится производительность труда в производстве сельскохозяйственной продукции вследствие автоматизации рутинных и алгоритмизируемых операций в интеллектуальной и производственной деятельности человека. Применение мостовых комбайнов с одноколесными каретками и широкопрофильными шинами сверхнизкого давления предпочтительней, так как, в отличие от движителей существующих типов машин для обработки посадок, они перемещаются в режиме полного кинематического соответствия, вследствие чего не создают сдвиговых деформаций почвы, не уплотняют верхний слой почвы, не меняют его водно-воздушных режимов и, соответственно, не ухудшают условий развития аэробных бактерий и не уменьшают численность и активность дождевых червей и т.п. благоприятных факторов плодородия почв. Следует отметить такие важные последствия применения роботизированного комбайна, как высвобождение людей с полевых работ за счет автоматизации сбора продукции и переработки собранного урожая в готовую для реализации конечную продукцию по безлюдным технологиям и повышение престижа крестьянского труда. Исходя из того, что в структуре овощных посевов общая площадь посадок томатов составляет около 24%, огурцов и перца по 10-11%, а в структуре овощной продукции, соответственно, томаты занимают до 27%, огурцы и перец - до 12%, можно рассчитывать на существенный социо-экономический эффект от повышения производительности и интенсификации труда в производстве плодоовощной продукции за счет автоматизации ухода за посадками и сбора продукции. Источники информации 1. Chamen W.C.T., Dowler D., Leede P.R., Longstaff D.J. Design, operation and performance of a gantry system: experience in arable cropping. Journal of Agricultural Engineering Research 1994, 59: 45-60. Формула изобретения1. Сельскохозяйственный робот, состоящий из двух кареток с приводимыми от двигателя колесами, агрегатными отсеками с устройствами для обработки и упаковки продукции, навигационным оборудованием и устройством управления роботом, и соединяющей каретки платформы со связанными проводным или беспроводным способом с устройством управления роботом оптическими, микроволновыми и/или инфракрасными, ультрафиолетовыми, ультразвуковыми сканерами, рабочими органами для воздействия на почву и на посадки и сбора продукции и транспортером для перемещения продукции от рабочих органов к агрегатным отсекам, отличающийся тем, что платформа выполнена сборной из унифицированных производственных и/или транспортных секций (отсеков), причем производственные секции снабжены рабочим органом или органами, транспортером продукции и встроенными элементами электрической, пневматической и/или гидравлической системы робота, а рабочие органы представляют собой очувствленные посредством сенсоров положения многозвенные манипуляторы с числом степеней подвижности не меньше шести, а транспортные секции снабжены устройствами погрузки-выгрузки и обработки продукции. 2. Сельскохозяйственный робот по п.1, отличающийся тем, что каретки выполнены одноколесными, а центр масс робота расположен ниже оси вращения колес. 3. Сельскохозяйственный робот по п.2, отличающийся тем, что несущая конструкция кареток робота обладает дополнительно внутренней степенью подвижности в виде возможности перемещения центра масс робота относительно оси вращения колес и снабжена устройством, перемещающим центр масс робота относительно оси вращения колес в соответствии с изменениями динамических режимов движения робота и результирующего статического момента манипуляторов, определяемого устройством управления по данным сенсоров положения манипуляторов. 4. Сельскохозяйственный робот по п.1, отличающийся тем, что манипуляторы выполнены по схеме «хобот» и представляют собой трубчатую конструкцию, в стенку которой встроены соединенные через одну и образующие две группы из четных и нечетных номеров кольцевые эластичные камеры, а внутренний слой стенки образован эластичным шлангом с обращенным внутрь шланга щетинообразным ворсом из расположенных наклонно к основанию упругих волокон, а группы кольцевых камер с четными и нечетными номерами присоединены к пневматической системе робота посредством автоматического переключателя, подающего давление поочередно в разные группы. 5. Сельскохозяйственный робот по п.1, отличающийся тем, что излучающие и приемные элементы сканеров расположены на оконечной части манипуляторов. 6. Сельскохозяйственный робот по п.1, отличающийся тем, что на оконечной части манипуляторов расположены секаторы, управляемые от устройства управления роботом или от отдельного индикатора положения продукции относительно манипулятора. 7. Сельскохозяйственный робот по п.1, отличающийся тем, что транспортер продукции выполнен в виде приводимого от электромеханического, пьезомеханического, гидравлического или пневматического вибратора лотка с обращенным в его полость щетинообразным ворсом из расположенных наклонно к основанию упругих волокон. 8. Сельскохозяйственный робот по п.1, отличающийся тем, что колеса кареток имеют широкопрофильные пневматические шины с высокоэластичной беговой частью и размером, обеспечивающим нагрузочную способность колеса при 30%-ной деформации шины при избыточном давлении воздуха в шине порядка 7 кПа, а крепление колес на двухколесных каретках обладает дополнительной угловой подвижностью в горизонтальной плоскости для обеспечения полного кинематического соответствия перемещения колес робота во всех режимах движения. 9. Сельскохозяйственный робот по п.1, отличающийся тем, что устройство управления роботом выполнено в виде оснащенного сенсорами компьютеризованного комплекса с установленной на нем самообучающейся программой обработки данных сенсоров и восстановления пространственного динамического образа внешней среды и адаптивной системы управления движением аппарата и индивидуальными и совместными действиями манипуляторов. 10. Сельскохозяйственный робот по п.1, отличающийся тем, что робот выполнен мультиагентным с коллективным выполнением действий автономными мостовыми модулями и с разделением функций по обработке посадок и сбору продукции модулями-комбайнами с платформами из производственных секций и транспортировке продукции за пределы посадок модулями-транспортировщиками с платформами из транспортных секций. 11. Сельскохозяйственный робот по п.1, отличающийся тем, что устройства управления положением манипуляторов типа «хобот» снабжены вибраторами. Популярные патенты: 2075933 Композиция для иммунизации растений от различных фитопатогенов ... Тогда как индивидуальные полиненасыщенные жирные кислоты, например, арахидоновая кислота подвержены окислению на 5-10% за три дня хранения при температуре 37oС (по данным каталога фирмы "Serva", 1991). При использовании таблетку растворяют в 100 мл чистой холодной воды в течение 30 мин. Полученный концентрат препарата (маточный раствор) смешивают с необходимым количеством воды в зависимости от проводимой обработки и культуры. Проведены испытания композиции, содержащей различные сочетания жирных кислот, их смесей и их алкиловых эфиров и известного аналога ЛГП-комплекса, содержащего в качестве активного начала арахидоновую (АК) и эйкозапентаеновую кислоту (ЭПК), а также арахидоновой ... 2464784 Защитный слой для растений и деревьев, его изготовление и его применение ... ("Институтом биотехнического исследования и разработки") Graf GmbH на поверхностях пробки и описано ниже.Были предоставлены две различно покрытых и одна непокрытая бутылочные пробки (материал). - Обозначение образца 50/02/06-1: пробки, покрытые композицией по примеру применения 1, состав 1, помеченные желтой чертежной кнопкой.- Обозначение образца 50/02/06-2: пробки, покрытые композицией по примеру применения 1, состав 2, помеченные красной чертежной кнопкой.- Обозначение образца 50/02/06-3: непокрытые пробки, непомеченные. С поверхности пробок, для экспериментов был отделен слой около 1 мм толщиной в тонких дисках с размером приблизительно 1 см 2.Для исследований ... 2028749 Капустоуборочная машина ... 5 с ползунами 4 с помощью двух вертикальных силовых пневмоцилиндров 15 может передвигаться возвратно-поступательно по двум вертикальным направляющим штангам 2 вместе с рабочим органом (см. фиг. 1 и 2). Кроме того, на поворотном столе 6 закреплен вал 16, который с помощью гибкого вала 17 соединен с электроприводом, в который входит редуктор 18, муфта 19 и электродвигатель 20, за счет чего рабочий орган капустоуборочной машины может поворачиваться (см. фиг. 3 и 9). По направляющим 21 верхнего яруса рамы 1 с помощью тросов 22 на барабанах лебедок 23, соединенных с электроприводами (см. фиг. 1-3) передвигаются два кузова-самосвала 24 и 25, правый и левый (см. фиг. 1). В центре рамы 1 на ... 2241322 Навесное устройство трактора ... Раскос снабжен амортизатором, выполненным из полого корпуса. Внутри корпуса амортизатора установлены пружины сжатия. Верхняя и нижняя пружины сжатия смонтированы между регулируемым и подвижным штоками. Подвижный шток снабжен упором. Верхняя пружина сжатия установлена между крышкой полого корпуса и упором. Нижняя пружина смонтирована между упором и нижней крышкой полого корпуса. Диаметр упора равен внутреннему диаметру полого корпуса. Технический результат - обеспечение эксплуатационной надежности навешиваемых сельскохозяйственных машин при выполнении технологического процесса, снижение энергетических и ресурсных затрат. 1 з.п. ф-лы, 1 ил. Изобретение относится к ... 2218756 Способ изготовления антипаразитарного ошейника ... который принимается за прототип [3]. Способ включает изготовление ленты путем экструдирования полихлорвинила и последующую обработку ее поверхности пестицидом, который в таком случае адсорбируется в поверхностном слое небольшой толщины (несколько молекулярных слоев), что вызывает скорую его миграцию и сокращает срок эффективного функционирования ошейника. Решаемая изобретением задача - повышение эффективности способа изготовления антипаразитарного ошейника путем обеспечения смачивания каждой гранулы термопластичного полимера жидкими компонентами с захватом низкомолекулярных твердых частиц с последующим превращением в гранулят, равномерного распределения инсектицида - диазинона ... |
Еще из этого раздела: 2484613 Способ создания почвенно-растительного покрова при рекультивации нарушенных земель 2171570 Устройство для группового учета надоев молока при доении 2175177 Агромост с оснасткой для прокладки и уплотнения постоянных грунтовых колей 2427999 Способ повышения плодородия мерзлотных засоленных почв в условиях криолитзоны 2019938 Рабочий орган почвообрабатывающей машины 2138949 Комбинированный препарат для борьбы с таежными и лесными клещами, способ борьбы и аттрактант 2038763 Регулятор вакуума 2473366 Вещество, обладающее антимикробным действием 2264075 Рулонный пресс-подборщик лубяных культур 2293463 Способ разработки лесосек |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||