Рулонный прессПатент на изобретение №: 2490864 Автор: ЖЕТТ Кристоф (FR), ХАСС Лионель (FR), ПЛЕНЕР Оливье (FR) Патентообладатель: УЗИН КЛААС ФРАНС С.А.С. (FR) Дата публикации: 20 Августа, 2010 Начало действия патента: 12 Февраля, 2009 Адрес для переписки: 197101, Санкт-Петербург, а/я 128, "АРС-ПАТЕНТ", пат.пов. В.М. Рыбакову, рег. 90 Изображения 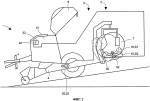 Изобретение относится к сельскохозяйственному машиностроению. Пресс содержит прессовальную камеру для сельскохозяйственных стебельчатых материалов и упаковочное устройство. Прессовальная камера соединена с помощью, по меньшей мере, одной несущей рамы, опирающейся на шасси, с упаковочным устройством, которое включает в себя упаковочный стол для упаковки тюка пленкой. Между прессом и упаковочным устройством имеется, по меньшей мере, одно устройство передачи тюка с активным приводом, предназначенное для передачи готового тюка от прессовальной камеры к упаковочному столу упаковочного устройства. Операционная последовательность передачи тюка от прессовальной камеры к упаковочному устройству управляется в функции наклона пресса и/или упаковочного устройства к горизонтальной плоскости. В области передачи тюка от прессовальной камеры к устройству передачи тюка сбоку расположен, по меньшей мере, один направляющий элемент. Поворот бокового направляющего элемента из положения покоя в рабочее положение осуществляется прямо или косвенно через посредство задней створки и/или тюка. В предложенном прессе обеспечивается надежная и безопасная работа в крайних ситуациях по уклону, в особенности при движении вниз по крутым уклонам. 11 з.п. ф-лы, 2 ил. Область техники Настоящее изобретение относится к рулонному прессу, содержащему прессовальную камеру для сельскохозяйственных стебельчатых материалов, соединенную с помощью, по меньшей мере, одной рамы, опирающейся на шасси, с упаковочным устройством, которое включает в себя упаковочный стол для упаковки тюка пленкой, причем между прессом и упаковочным устройством имеется, по меньшей мере, одно устройство передачи тюка с активным приводом, предназначенное для передачи готового тюка от прессовальной камеры к упаковочному столу упаковочного устройства. Уровень техники В рулонных прессах, которые оснащены упаковочным устройством, расположенным позади пресса, существует проблема передачи тюка от прессовальной камеры к упаковочному столу упаковочного устройства, в особенности при работе на неровной поверхности и в особенности при движении вниз по уклону. В этом случае не может быть гарантирована надежная передача тюка от прессовальной камеры к упаковочному устройству, что оказывает влияние на эффективность работы рулонного пресса. Из патентного документа DE 19731520 А1 известно решение по передаче тюка, согласно которому вытолкнутый из прессовальной камеры тюк непосредственно принимается упаковочным столом, предварительно подвинутым в положение под разгрузочным отверстием рулонного пресса. После этого упаковочный стол с находящимся на нем тюком перемещается в положение упаковки. Недостаток этого решения заключается как в недостаточном направлении, в особенности в направлении с боковых сторон, так и в недостаточно надежном удержании тюка во время передачи и во время перемещения упаковочного стола в положение упаковки. Другое решение известно из патентного документа ЕР 0983720 А1. Предложено улавливающее устройство в виде поворотной захватной вилки, расположенной между рулонным прессом и упаковочным устройством. Захватная вилка, снабженная боковыми направляющими, установлена с возможностью поворота вокруг оси, расположенной вблизи основной рамы упаковочного устройства. После открытия створки рулонного пресса тюк принимается захватной вилкой и передается на упаковочный стол. Затем захватная вилка сразу же поворачивается в свое исходное положение. При этом, в особенности при движении по уклонам, сохраняется риск того, что после возврата захватной вилки в исходное положение тюк может скатиться обратно с упаковочного стола. Далее, из патентного документа ЕР 1726204 А1 известен агрегат «пресс-упаковщик», с двумя активными зонами, в котором передаточные средства выполняют активную передаточную функцию в первой активной зоне, а во второй активной зоне действие обеспечивается гравитацией, и эти средства выполняют функцию ограничения с настройкой на различные диаметры тюков. Недостаток этого решения состоит в том, что при повороте упаковочного стола в его исходное положение активизируется поворот передаточных средств в их основное положение, в результате чего не полностью исключается обратное скатывание тюка с упаковочного стола, в особенности при движении на крутых уклонах. Раскрытие изобретения Задачей изобретения является устранение недостатков указанных решений уровня техники и создание пресса, скомбинированного с упаковочным устройством для обертывания тюков, в котором обеспечивается надежная и безопасная работа даже в крайних ситуациях по уклону, в особенности при движении вниз по крутым уклонам. В соответствии с изобретением решение поставленной задачи достигается за счет отличительных признаков по пункту 1 формулы изобретения. В зависимых пунктах изложены признаки, развивающие данное решение предпочтительным образом. Согласно изобретению пресс-упаковщик выполнен с возможностью управления операционной последовательностью передачи тюка от прессовальной камеры к упаковочному устройству в функции наклона пресса и/или упаковочного устройства к горизонтальной плоскости. За счет этого, в особенности при движении вниз по уклону, обеспечивается возможность передачи тюка от прессовальной камеры через устройство передачи тюка к упаковочному устройству с управлением в соответствии с превалирующим уклоном для того, чтобы избежать обратного скатывания тюка с упаковочного устройства даже при движении по крутым уклонам и при этом освободить оператора от необходимости постоянного наблюдения за процессом передачи тюка при движении по таким уклонам. Согласно дальнейшему решению по развитию изобретения управление операционной последовательностью производится вручную оператором и/или автоматически посредством устройства управления, расположенного на прессе и/или на тракторе. Ручное управление операционной последовательностью передачи тюка имеет то преимущество, что операционная последовательность может управляться быстро и индивидуально в зависимости от оценки уклона. Автоматическое управление операционной последовательностью передачи тюка посредством устройства управления дает преимущество в освобождении оператора от управления. В следующем предпочтительном решении по развитию изобретения пресс или упаковочное устройство содержат или содержит, по меньшей мере, один датчик, выполненный для восприятия наклона пресса и/или упаковочного устройства относительно вертикали. Таким образом, управление операционной последовательностью передачи тюка от прессовальной камеры пресса к упаковочному устройству может выполняться в функции наклона. Здесь возможны различные варианты выполнения датчика наклона, например, в виде механического или электрического или электронного датчика. В случае автоматического управления операционной последовательностью предпочтительно имеется устройство управления, связанное с датчиком наклона, который генерирует величину сигнала в соответствии с наклоном пресса и/или упаковочного устройства, при этом в функции этой величины выполняется операционная последовательность работы устройства передачи тюка и/или упаковочного стола, в частности, поворот устройства передачи тюка и/или упаковочного стола производится в функции этой величины. За счет этого обеспечивается надежная передача тюка от пресса к упаковочному устройству даже при работе в экстремальных ситуациях по уклону, в особенности при движении по уклону вниз. Эффективная и особенно надежная операционная последовательность по передаче тюка возможна в том случае, когда после передачи тюка к упаковочному устройству устройство передачи тюка остается в поднятом положении и выполняет функцию ограничения тюка, находящегося на упаковочном столе, до тех пор, пока упаковочный стол не займет горизонтальное положение относительно вертикали, когда датчиком наклона определяется наклон пресса и/или упаковочного устройства, соответствующий движению вниз по уклону. В следующем предпочтительном примере осуществления для активизации действия устройства передачи тюка предусмотрен, по меньшей мере, один датчик, предназначенный для определения достижения тюком конечного положения на устройстве передачи тюка. В следующем предпочтительном решении по развитию изобретения, по меньшей мере, один жесткий и/или поворотный направляющий элемент расположен сбоку в области передачи тюка от прессовальной камеры к устройству передачи тюка. Наиболее предпочтительно расположение, по меньшей мере, одного поворотного направляющего элемента дает то преимущество, что в этом примере выполнения боковые направляющие элементы могут быть расположены очень близко в зоне задней створки пресса, чтобы создавать для тюка непосредственное поперечное ограничение при его выходе из прессовальной камеры. За счет того, что поворот, по меньшей мере, одного бокового направляющего элемента из положения покоя в рабочее положение осуществляется прямо или косвенно через посредство створки или тюка, обеспечивается надежная передача тюка к устройству передачи тюка при движении по уклону. Для своевременного осуществления поворота бокового направляющего элемента из положения покоя в рабочее положение на прессе предусмотрен датчик, который во время операции открывания задней заслонки вызывает поворот, по меньшей мере, одного бокового направляющего элемента. В следующем предпочтительном решении по развитию изобретения на устройстве передачи тюка предусмотрен, по меньшей мере, один датчик, который при достижении тюком конечного положения на устройстве передачи тюка вызывает поворот устройства передачи тюка в вертикальном направлении. При этом обеспечивается надежная передача тюка к упаковочному устройству и в то же время предотвращается обратное скатывание тюка в направлении к прессовальной камере. В простейшем случае привод в действие, по меньшей мере, одного поворотного направляющего элемента и/или устройства передачи тюка и/или упаковочного стола осуществляется механически. Возможно также использование гидравлических и электрических поворотных исполнительных органов, таких как гидроцилиндры или приводные исполнительные органы. Для того чтобы обеспечить полную безопасность и надежность передачи тюка к упаковочному устройству даже во время движения вниз по очень крутому уклону, устройство передачи тюка установлено с возможностью поворота вокруг оси, расположенной поперечно направлению движения несущей рамы. Это дает возможность надежно справиться с усилиями, которые создаются в особенности при передаче тяжелых тюков. Согласно дальнейшему примеру выполнения изобретения упаковочный стол может быть выполнен с возможностью поворота вокруг горизонтальной оси поворота на несущей раме в положение загрузки, положение упаковки и положение разгрузки. Отдельная установка упаковочного стола и устройства передачи тюка создает то преимущество, что возникающие усилия могут в каждом случае непосредственно восприниматься несущей рамой. В предпочтительном варианте осуществления, по меньшей мере, один боковой направляющий элемент, устройство передачи тюка и упаковочный стол оперативно связаны с дисплеем и исполнительным блоком, выполненным с возможностью управления от трактора. Краткий перечень чертежей Далее со ссылками на прилагаемые чертежи будут подробно описаны предпочтительные примеры осуществления изобретения. На чертежах: фиг.1 схематично изображает в продольном разрезе пресс-упаковщик во время движения вниз по уклону в процессе передачи тюка из прессовальной камеры к устройству для передачи тюка, фиг.2 изображает пресс-упаковщик на том же виде, при этом упаковочный стол упаковочного устройства находится в положении упаковки. Осуществление изобретения На фиг.1 схематично показан комбинированный агрегат 3 «пресс-упаковщик», состоящий из пресса 1 и упаковочного устройства 2, во время движения вниз по уклону в сцепке с трактором, который не показан. Здесь две отдельные машины 1, 2 соединены несущей рамой 4. Возможны другие варианты выполнения с индивидуальными разъемно соединенными рамами, а также в виде самоходного комбинированного агрегата 3. Пресс 1, выполненный в виде рулонного пресса 5, содержит коробчатый корпус 6 с размещенным в нем не показанным механизмом обвязки тюка 7, а в задней области показана задняя створка 8, которая может поворачиваться для выброса обвязанного тюка 7. Корпус 6 установлен на неприводных колесах 9 на не показанной ходовой оси, при этом на корпусе 6 образованы продольные стойки 10, которые проходят в боковые стороны и сопрягаются с тяговой балкой 11 на ее переднем конце. Рулонный пресс 5 включает в себя несколько транспортирующих элементов, которые расположены рядом друг с другом в поперечном направлении. Они известны сами по себе и здесь не описываются. Они приводятся в движение во время операции уборки и окружают тюк 7, формируемый в прессовальной камере 12 спереди, сверху и снизу. Основная конструкция и работа такого рулонного пресса общеизвестны. В этом отношении можно сослаться на патентный документ DE 102004033252 А1, содержание которого включено в данную заявку в качестве ссылки. Позади рулонного пресса 5 на несущей раме 4 установлено упаковочное устройство 2. Оно содержит выносную стрелу 13, на которой установлено приводимое во вращение U-образное несущее устройство 14 с двумя упаковочными манипуляторами 15, причем на конце каждого из них предусмотрено устройство 16 для подачи пленки. Упаковочное устройство 2 содержит также упаковочный стол 18, который может поворачиваться вокруг оси 17 поворота на несущей раме 4. Упаковочный стол 18 состоит из поворотной рамы 19, содержащей не показанные вращающиеся ролики, огибаемые в продольном направлении множеством конвейерных лент, на которые поступает тюк 7. Вращающиеся ролики могут приводиться не показанным цепным приводом. Во время операции обертывания этот привод обеспечивает вращение тюка в окружном направлении, так что тюк может быть обернут по всей окружной поверхности и на торцевых сторонах. С боковой стороны с упаковочным столом 18 связан направляющий элемент 20 для бокового направления тюка 7. Возможен вариант выполнения, в котором задний конец упаковочного стола 18 снабжен удерживающим элементом, который предназначен для удержания тюка 7 от скатывания в направлении, обратном направлению движения комбинированного агрегата 3, и может быть откинут вниз для укладки упакованного тюка на поверхность 21 поля. В области между рулонным прессом 5 и упаковочным устройством 2 находится передаточный участок, на котором выходящие из пресса 1 готовые прессованные тюки 7 принимаются и передаются к упаковочному устройству 2. Следует отметить, что этот передаточный участок в известной степени оказывает влияние на работу и эффективность комбинированного агрегата 3 «пресс-упаковщик». При движении комбинированного агрегата 3 по уклону, в особенности по крутому уклону вниз, не гарантируется надежная передачи тюка 7 от прессовальной камеры 12 к упаковочному устройству 2 в положение упаковки, поскольку операционная последовательность передачи тюка оптимизирована только для работы на горизонтальной поверхности. Согласно изобретению операционная последовательность функциональных элементов для передачи тюка 7 от прессовальной камеры 12 к упаковочному устройству 2 управляется в функции наклона пресса 1 и/или упаковочного устройства 2 к горизонтальной поверхности, так что всегда может быть обеспечена надежная передача тюка 7 от прессовальной камеры 12 к упаковочному устройству 2 с учетом наклона, и оператор в значительной степени освобожден от необходимости контроля передачи тюка. Здесь управление операционной последовательностью может осуществляться вручную с помощью не показанных исполнительных элементов и/или автоматически с помощью устройства 22 управления. Как показано более подробно на фиг.1, после открытия задней створки 8 готовый прессованный тюк 7 движется по роликовой раме или рольгангу 24, занимая последовательный ряд показанных штрихпунктиром положений 23. Рольганг 24 проходит от прессовальной камеры 12 под задней створкой 8 и до устройства 26 передачи тюка, которое находится в исходном положении А1 и может поворачиваться вокруг оси 25 поворота по типу люльки. Устройство 26 передачи тюка имеет прямоугольную форму и содержит боковые рамы 27, шарнирно укрепленные на несущей раме 4 и соединенные не показанными поперечными элементами. В свою очередь поперечные элементы соединены с не показанными продольными прутьями для опоры тюков, причем эти продольные прутья могут иметь лотковую форму в соответствии с формой тюков. Устройство 26 передачи тюка может быть также выполнено регулируемым по длине для настройки на различные диаметры тюков. Для надежного бокового направления тюка 7, особенно при движении по косогору, на несущей раме 4 у краев рольганга 24 установлены поворотные направляющие элементы 28 с не показанными установочными средствами, например, в виде гидроцилиндров. Эти установочные средства связаны с устройством 22 управления, которое при открывании задней створки 8 переводит направляющие элементы 28 из положения 29 покоя, показанного штрихпунктиром, в рабочее положение 30. Распознавание открытого положения задней створки 8 производится датчиком 35 на задней створке 8. Благодаря выполнению направляющих элементов 28 поворотными возможно их расположение непосредственно под задней створкой 8 по сравнению с жесткими направляющими элементами без риска столкновения при открывании задней створки 8. Дополнительно возможен вариант выполнения, при котором направляющие элементы 28 расположены непосредственно на несущей раме 4 с возможностью поворота. Для определения открытого положения задней створки датчик 35 связан с устройством 22 управления. При повороте устройства 26 передачи тюка с помощью, например, не показанного гидроцилиндра, передний конец устройства 26 передачи тюка поднимается из исходного положения А1 по стрелке, пока тюк 7 не перекатится под действием собственного веса в улавливающий лоток упаковочного стола 18. Как показано более подробно на фиг.2, конечное положение тюка 7 на упаковочном столе 18, выполненном в форме лотка, определяется контактным датчиком 32, который расположен на упаковочном столе и передает соответствующий сигнал в устройство 22 управления. В том случае, когда эта операция выполняется на нехолмистой местности, устройство 22 управления вызывает непосредственный поворот устройства 26 передачи тюка в исходное положение А1, показанное на фиг.1, как только начинается поворот упаковочного стола 18 в упаковочное положение S2, так что процесс упаковки для обертывания тюка 7 может начинаться без промедления. Поворот упаковочного стола 18 производится с помощью не показанных гидроцилиндров на несущей раме 4, шарнирно прикрепленных к упаковочному столу 18. Дополнительно этот сигнал может использоваться для дополнительных операций, таких как поворот боковых направляющих элементов 28 в положение 29 покоя и закрывание задней створки 8. Во время работы на крутых уклонах, в особенности при движении по уклону вниз, может происходить обратное скатывание тюка 7 с упаковочного стола 18 в направлении прессовальной камеры 12 из-за наклона комбинированного агрегата 3. Согласно изобретению предусмотрен датчик 33 наклона, расположенный, например, в устройстве 22 управления рулонного пресса. В простейшем случае датчик 33 наклона сожжет представлять собой ртутный уровень, который воспринимает направления наклона комбинированного агрегата 3 относительно его абсолютного положения. Датчик 33 наклона выполнен таким образом, чтобы передавать сигнал, предпочтительно электронный сигнал, по которому с помощью не показанного здесь компьютера может быть вычислено, наклонен ли комбинированный агрегат 3 в поперечном или продольном направлении. Возможен вариант выполнения, при котором установленный наклон отображается для оператора на дисплеев в кабине не показанного трактора. В этом случае оператор может вручную вмешаться в операционную последовательность передачи тюка от прессовальной камеры 12 к упаковочному устройству 2 с помощью соответствующих средств. Из-за наклона комбинированного агрегата 3, который воспринимается датчиком 33 наклона и, как это показано на фиг.1, соответствует движению вниз по уклону, операционная последовательность осуществляется другим образом по сравнению с описанным процессом при работе на ровной местности. Во время поворота упаковочного стола 18 из загрузочного положения S1 приема тюка 7 в его показанном штрихпунктиром положении 34 в упаковочное положение S2 устройство 26 передачи тюка остается в поднятом положении и осуществляет функцию ограничения тюка 7, находящегося в положении под углом, почти равным 90°, к упаковочному столу 18. Это положение устройства 26 передачи тюка сохраняется до тех пор, пока упаковочный стол 18 не займет свое конечное упаковочное положение S2, и тюк 7 вследствие лотковой формы упаковочного стола 18 и занятого им упаковочного положения S2 не будет зафиксирован от обратного скатывания. После достижения упаковочного положения S2 устройство 22 управления вызывает поворот устройства 26 передачи тюка в исходное положение А1 по фиг.1, так что упаковочный процесс обертывания тюка 7 может начинаться. После завершения операции обертывания упаковочный стол 18 наклоняется в не показанное здесь разгрузочное положение для укладки готового обернутого тюка 7 на поверхность 21 земли. По окончании операции прессования следующего тюка 7 начинается новый процесс передачи тюка в функции определяемого наклона. Для специалиста в данной области понятно, каким образом можно осуществить различные не выходящие за пределы сферы действия изобретения модификации описанного примера выполнения для получения описанных результатов. Формула изобретения1. Пресс-упаковщик, содержащий прессовальную камеру для сельскохозяйственных стебельчатых материалов, соединенную с помощью, по меньшей мере, одной рамы, опирающейся на шасси, с упаковочным устройством, которое включает в себя упаковочный стол для упаковки тюка пленкой, причем между прессом и упаковочным устройством имеется, по меньшей мере, одно устройство передачи тюка с активным приводом, предназначенное для передачи готового тюка от прессовальной камеры к упаковочному столу упаковочного устройства, причем пресс-упаковщик выполнен с возможностью управления операционной последовательностью передачи тюка (7) от прессовальной камеры (12) к упаковочному устройству (2) в функции наклона пресса (1) и/или упаковочного устройства (2) к горизонтальной плоскости, отличающийся тем, что в области передачи тюка от прессовальной камеры (12) к устройству (26) передачи тюка сбоку расположен, по меньшей мере, один поворотный направляющий элемент (28), причем поворот, по меньшей мере, одного бокового направляющего элемента (28) из положения (29) покоя в рабочее положение (30) осуществляется прямо или косвенно через посредство задней створки (8) и/или тюка (7). 2. Пресс-упаковщик по п.1, отличающийся тем, что он выполнен с возможностью управления операционной последовательностью вручную и/или автоматически посредством устройства (22) управления. 3. Пресс-упаковщик по п.1, отличающийся тем, что пресс (1) или упаковочное устройство (2) содержит, по меньшей мере, один датчик (33) наклона, выполненный для восприятия наклона пресса (1) и/или упаковочного устройства (2) относительно вертикали. 4. Пресс-упаковщик по п.2, отличающийся тем, что устройство (22) управления связано с датчиком (33) наклона, который генерирует величину сигнала в соответствии с наклоном пресса (1) и/или упаковочного устройства (2), при этом поворот устройства (26) передачи тюка и/или упаковочного стола (18) производится в функции этой величины. 5. Пресс-упаковщик по любому из пп.1-4, отличающийся тем, что после передачи тюка к упаковочному устройству (2) устройство (26) передачи тюка остается в поднятом положении и выполняет ограничительную функцию до тех пор, пока упаковочный стол (18) не займет горизонтальное положение относительно вертикали, когда датчиком наклона определяется наклон пресса (1) и/или упаковочного устройства (2). соответствующий движению вниз по уклону. 6. Пресс-упаковщик по любому из пп.1-4, отличающийся тем, что предусмотрен, по меньшей мере, один датчик (31), который при достижении конечного положения тюка (7) на устройстве (26) передачи тюка вызывает поворот устройства (26) передачи тюка в вертикальном направлении. 7. Пресс-упаковщик по любому из пп.1-4, отличающийся тем, что пресс (1) содержит датчик (35), который во время операции открывания задней заслонки (8) вызывает поворот, по меньшей мере, одного бокового направляющего элемента (28). 8. Пресс-упаковщик по любому из пп.1-4, отличающийся тем, что на устройстве (26) передачи тюка предусмотрен, по меньшей мере, один датчик (31), который при достижении конечного положения тюка (7) на устройстве (26) передачи тюка вызывает поворот устройства (26) передачи тюка в вертикальном направлении. 9. Пресс-упаковщик по любому из пп.1-4, отличающийся тем, что для перемещения, по меньшей мере, одного поворотного направляющего элемента (28) и/или устройства (26) передачи тюка и/или упаковочного стола (18) имеются механические, гидравлические или электрические поворотные исполнительные органы. 10. Пресс-упаковщик по любому из пп.1-4, отличающийся тем, что устройство (26) передачи тюка установлено с возможностью поворота вокруг оси, расположенной поперечно направлению движения несущей рамы (4). 11. Пресс-упаковщик по любому из пп.1-4, отличающийся тем, что упаковочный стол (18) выполнен с возможностью поворота вокруг горизонтальной оси (17) поворота на несущей раме (4) в положение (S1) загрузки, положение (S2) упаковки и положение разгрузки. 12. Пресс-упаковщик по любому из пп.1-4, отличающийся тем, что, по меньшей мере, один боковой направляющий элемент (28), устройство (26) передачи тюка и упаковочный стол (18) оперативно связаны с дисплеем и исполнительным блоком, выполненный с возможностью управления от трактора. Популярные патенты: 2462864 Устройство составления экономичного кормового рациона и экономичного кормления животных и птиц ... способ и устройство для выращивания птицы, позволяющие управлять обогревом и кормлением птицы по величине принятого технико-экономического показателя прироста прибыли (см. патент РФ 2340172. Способ и устройство для выращивания птицы / А.В.Дубровин и др. // БИ, 2008. 34).Недостатком данного технического решения является отсутствие учета в реальном времени качественного и количественного состава (рациона) птичьего корма и соответствующей возможности рационально управлять им.Задачей изобретения является составление экономичного кормового рациона и экономичное кормление животных и птицы, автоматизированный поиск положения экономического баланса между суммой стоимостей ингредиентов ... 2381650 Синергические фунгицидные комбинации биологически активных веществ и их применение для борьбы с нежелательными фитопатогенными грибами ... 0,0000001 до 95 вес. процентов биологически активного вещества, предпочтительно от 0,0001 до 1 вес. процента. Применение обычно осуществляют способом, приспособленным к виду препарата, готового для применения.Препараты для борьбы с нежелательными фитопатогенными грибами содержат, как правило, от 0,1 до 95 вес. процентов биологически активного вещества, предпочтительно от 0,5 до 90 вес. процентов.Комбинации биологически активных веществ согласно данному изобретению могут применяться как сами по себе, в виде их препаратов, так и в виде приготовленных из них готовых для применения форм, таких как готовые к применению растворы, эмульгируемые концентраты, эмульсии, суспензии, порошки ... 2387128 Система сбора отходов для отделения жидких отходов от твердых отходов ... вблизи нижнего ролика конвейера. 11. Система сбора отходов по п.1, в которой сборники жидких и твердых отходов оба расположены вблизи нижнего ролика конвейера. 12. Система сбора отходов по п.11, в которой сборник жидких отходов содержит открытый сверху контейнер и наклонный экран дефлектора твердых отходов, проходящий над открытым сверху контейнером. 13. Система сбора отходов по п.1, включающая в себя скрепер, контактирующий с конвейером.14. Система сбора отходов по п.1, включающая в себя желоб, в котором размещен конвейер, причем желоб имеет противоположные стенки, а конвейер расположен между этими противоположными стенками, и уплотняющие средства для уплотнения ... 2160533 Способ профилактики и коррекции транспортного стресса у крупного рогатого скота ... повышению массы внутреннего сала на 1,5 кг. Увеличение экспозиции использования корня солодки перед транспортировкой на мясокомбинат до 7 суток способствовало снижению потерь мясной продуктивности (табл. 3). Так, если в контрольной группе потери живой массы за транспортировку составили 27,1 (6,31%), то в опытных группах они были меньше соответственно на 5,7 кг (1,34%); 8,2 кг (1,92%); 10,1 кг (2,35%) и 6,5 кг (1,53%). Следовательно, скармливание убойному молодняку в течение семи суток до транспортировки корня солодки позволило сократить потери живой массы в среднем на 7,6 кг (1,7%). Наибольшим сокращением потерь живой и убойной массы характеризовался молодняк, получавший ... 2228588 Копатель корнеклубнеплодов ... то определим из выражения NO2=htg при заданных: h - расстояние по вертикали от центра вращения до пересечения с горизонтальной осью NO2=“а” опорного шарнира каретки 10, - угол между вертикалью и направлением продольной оси шатуна 9, NO2/h=tg, откуда =arctg “а”/h. Например: “а”=0,08 м, h=0,3 м, т.е. =arctg 0,08/0,3=14,9, принимаем =15, который определяет величину перемещений. При этом вертикальное перемещение каждой точки лемеха 11 с прутками 15 определяется из условия перемещения одной и той же точки по траектории, определяемой в зависимости от радиуса вращения эксцентрикового барабана 3 и коэффициента пропорциональности К(о.е.) плеч шатуна 9. Так как h=Н-h, то из ... |
Еще из этого раздела: 2399194 Способ и устройство контроля воздушного режима в корнеобитаемой среде 2245017 Способ подготовки картофеля перед закладкой на хранение 2050099 Косилка с всасывающим устройством 2189708 Машина для формирования гребней 2059368 Способ борьбы с насекомыми-листогрызущими вредителями растений 2454066 Светодиодный фитооблучатель 2264082 Способ восстановления полей бурой водоросли ламинарии 2051575 Способ отделения дождевых червей от среды обитания и устройство для его осуществления 2094986 Гербицидный состав 2487516 Почвообрабатывающая машина |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||