Система управления сельскохозяйственного транспортного средстваПатент на изобретение №: 2486738 Автор: ХУСТЕР Йохэн (DE), МЁЛЛЕР Йенс (DE), ДИКХАНС Норберт (DE), АУТЕРМАНН Лудгер (DE), НИНАБЕР Герхард (DE), ХИРОНИМУС Петер (DE), ВИЛЬКЕН Андреас (DE), ПАЙН Кристоф (DE), МЕЙЕР цу ХЕЛЛИГЕН Ларс-Петер (DE), МАДСЕН Томми (DK), КИРК Кристиан (DK), БЛАС Руфус (DK) Патентообладатель: АГРОКОМ ГмбХ & Ко. АГРАРСИСТЕМЕ КГ (DE) Дата публикации: 10 Июля, 2013 Начало действия патента: 31 Июля, 2008 Адрес для переписки: 197101, Санкт-Петербург, а/я 128, "АРС-ПАТЕНТ", пат. пов. М.В. Хмаре, рег. № 771 Изображения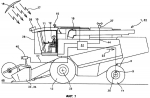 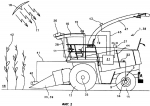 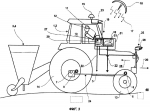 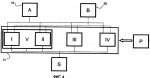 Изобретение относится к сельскому хозяйству. Система управления для сельскохозяйственного транспортного средства содержит, по меньшей мере, две системы датчиков для генерирования сигналов, которые зависят от транспортного средства или от характеристик культуры или от окружающей среды или от комбинации этих факторов. Система управления выполнена с возможностью обработки сигналов датчиков посредством, по меньшей мере, одного первого и, по меньшей мере, одного второго алгоритмов обработки сигналов датчиков. Система управления имеет возможность выбора подлежащего использованию алгоритма в зависимости, по меньшей мере, от одного характерного параметра. Использование системы управления обеспечивает оптимальную интеграцию сигналов датчиков от систем датчиков. 15 з.п. ф-лы, 4 ил. ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУОбласть техники, к которой относится изобретение Настоящее изобретение относится к системе управления для сельскохозяйственного транспортного средства в соответствии с ограничительной частью пункта 1 формулы изобретения. Уровень техники Системы управления для сельскохозяйственных транспортных средств используются, например, для управления с использованием так называемых систем ведения по маршруту. Использование систем ведения по маршруту для полностью или частично автоматических систем направления сельскохозяйственных транспортных средств по виртуальным или реальным задающим линиям имеет большое практическое значение, так как оператор транспортного средства в значительной мере освобождается от процесса рулевого управления, который порой требует большого мастерства. Некоторое время использовались механические системы ведения по маршруту, которые обычно отыскивают задающие линии на обрабатываемой территории с помощью механических датчиков и на основании установленных контуров генерируют направляющие сигналы для направления транспортного средства по этому контуру. Поскольку такие системы способны сканировать территорию перед транспортным средством только на очень ограниченной площади, они все больше заменяются электронными системами, которые обычно обладают возможностью обследовать подлежащую обработке территорию также на большом расстоянии перед транспортным средством. При использовании таких систем приемлемы намного более широкие допуски на инерцию систем рулевого управления благодаря указанной способности заранее обследовать подлежащую обработке территорию. Системы на основе GPS (Global Positioning System - глобальная система навигации и определения местоположения) широко используются в области электронных систем распознавания маршрута. Можно сослаться, например, на патентный документ DE 10129135 А1, в котором раскрыта так называемая GPS-система рулевого управления применительно к зерноуборочному комбайну. Однако недостаток устройств на основе GPS при определении местоположения заключается в том, что ложные сигналы, вызванные, в частности, текущими ошибками в GPS-сигналах или помехами приема, могут вызывать значительные погрешности в автоматическом рулевом управлении транспортным средством. При определенных условиях это может приводить к ситуации, когда рабочее транспортное средство отклоняется от заданного маршрута обработки, что существенно ухудшает качество работы транспортного средства. Для снижения этих недостатков в патентном документе DE 10129135 А1 предложен способ объединения системы распознавания маршрута на основе GPS с дополнительной системой распознавания маршрута, например с системой лазерного сканирования или системой обработки изображений. В этом случае сигналы положения, генерируемые используемыми системами, сопоставляются друг с другом в устройстве управления и обработки данных. Особенный недостаток такой системы состоит в том, что она всегда привязана к данным положения от двух систем распознавания маршрута. В случае отсутствия одного или обоих сигналов положения генерируется заменяющий сигнал положения, который иногда может значительно отклоняться от реального положения рабочего транспортного средства. Чем хуже качество сигналов положения, принимаемых от отдельных систем распознавания маршрута, тем больше будет это отклонение. Кроме того, такое взаимодействие нескольких систем распознавания маршрута не учитывает тот факт, что при наличии оптических задающих линий, выполненных на подлежащей обработке территории, система распознавания маршрута, которая непосредственно сканирует территорию, дает более точные данные положения по сравнению с системами на основе GPS, так как воспроизводит действительные условия на территории. Поскольку во множестве областей использования требуется точное воспроизведение действительных географических условий на подлежащей обработке территории, из уровня техники известны системы, такие как, например, система по патентному документу DE 10328395 А1, в которой определение данных положения на основе GPS полностью заменено системами на основе камеры. В представленной системе путь сельскохозяйственного рабочего транспортного средства, выполненного в виде трактора, записывается с помощью устройства записи изображений, расположенного на тракторе. Далее генерируемые изображения сравниваются в устройстве управления и обработки данных с записанными в нем данными изображений теоретического маршрута, а затем производится корректировка маршрута на основе сравнения путем генерирования требуемых направляющих сигналов. Поскольку система ведения по маршруту по DE № 10328395 А1 принуждает рабочее транспортное средство следовать по предварительно определенному маршруту аналогично системам на основе GPS, во-первых, этот теоретический маршрут должен быть предварительно определен. Во-вторых, этот предварительно определенный маршрут может далее в значительной степени не соответствовать действительным условиям в тех случаях, когда оптимальный проход по территории, сохранение культуры в зависимости от условий ее роста требует маршрута, отличного от предварительно определенного маршрута. В таком случае будет совершен проезд по растущей культуре, влекущий потери урожая. Соответственно, такие системы обладают теми же недостатками, что и системы на основе GPS, поскольку системы на основе GPS структурно аналогичны системе по DE 10328395 А1. Для устранения недостатков указанных решений уровня техники в патентном документе DE 102005041550 А1 описана система ведения по маршруту для сельскохозяйственных транспортных средств, в которой две независимо действующие системы распознавания маршрута в виде системы распознавания маршрута на основе GPS и системы распознавания маршрута на основе камеры связаны друг с другом таким образом, что в процессе распознавания маршрута возможно переключение между двумя системами в зависимости от критериев управления. Однако недостаток такой системы заключается в том, что в каждый момент времени может использоваться только одна из систем распознавания маршрута, и эти системы не могут быть объединены с тем, чтобы воспользоваться преимуществами совместного управления сельскохозяйственным транспортным средством. Раскрытие изобретения Задача, на решение которой направлено настоящее изобретение, заключается в создании системы управления для сельскохозяйственного транспортного средства, содержащей, по меньшей мере, две системы датчиков, которые генерируют сигналы датчиков, зависящие от характеристик транспортного средства, или от характеристик культуры, или от окружающей среды, или от комбинации перечисленных факторов таким образом, что устраняются недостатки описанных известных решений и, в частности, обеспечивается оптимальная интеграция сигналов датчиков от систем датчиков. В соответствии с изобретением решение поставленной задачи достигается за счет отличительных признаков изобретения по пункту 1 формулы изобретения. Поскольку система управления имеет, по меньшей мере, один первый и, по меньшей мере, один второй алгоритм обработки сигналов датчиков, а выбор того, какой алгоритм обработки сигналов датчиков должен использоваться, зависит от, по меньшей мере, одного характерного параметра, сигналы датчиков от систем датчиков всегда связаны друг с другом и/или используются совместно таким образом, который диктуется превалирующей ситуацией. В данном контексте, по меньшей мере, один характерный параметр является индикатором требований имеющей место ситуации. Поскольку система управления способна выбирать между различными алгоритмами обработки сигналов датчиков в зависимости от характерных параметров, становится возможным оптимальное использование имеющихся сигналов датчиков в любой момент в соответствии с ситуацией. Поэтому выбор алгоритмов обработки сигналов датчиков выходит далеко за пределы простого переключения между сигналами датчиков, а также далеко за пределы простого комбинирования сигналов датчиков и простой корректировки сигналов датчиков. Впервые выбор дает возможность избежать различных недостатков отдельных алгоритмов обработки отдельных сигналов датчиков путем предоставления в распоряжение системы управления сельскохозяйственным транспортным средством, по меньшей мере, второго алгоритма обработки сигналов датчиков, что обеспечивает лучшее управление в условиях конкретной ситуации. Предпочтительно, по меньшей мере, один алгоритм обработки сигналов датчиков решен таким образом, что выбирает для обработки сигналов, по меньшей мере, один сигнал датчиков, по меньшей мере, двух систем датчиков. Однако алгоритм обработки сигналов датчиков также может быть решен таким образом, что он уравнивает друг с другом, по меньшей мере, два сигнала датчиков от, по меньшей мере, двух систем датчиков. Кроме того, алгоритм обработки сигналов датчиков может быть решен таким образом, что сигнал датчиков от, по меньшей мере, одной системы датчиков используется для корректировки сигнала датчиков от второй системы датчиков. Далее, алгоритм обработки сигналов датчиков может быть решен таким образом, что он переключается между сигналами датчиков от, по меньшей мере, двух систем датчиков в зависимости от общих условий. Кроме того, алгоритм обработки сигналов датчиков может быть решен таким образом, что в нем скомбинированы, по меньшей мере, один алгоритм обработки сигналов датчиков, по меньшей мере, с одним другим алгоритмом обработки сигналов датчиков для генерирования сигнала управления. Возможен также ряд других решений алгоритмов обработки сигналов датчиков, так что приведенный перечень не должен рассматриваться как ограничительный или исчерпывающий. В системе управления всегда присутствуют два или множество алгоритмов обработки сигналов датчиков. В предпочтительном примере осуществления изобретения указанный, по меньшей мере, один характерный параметр представляет собой точность сигнала управления, генерируемого алгоритмом обработки сигналов датчиков. Таким образом, если требуется очень точное управление сельскохозяйственным транспортным средством, используется алгоритм обработки сигналов датчиков, который после обработки сигналов дает наиболее точный сигнал управления. В альтернативном предпочтительном примере осуществления этот, по меньшей мере, один характерный параметр представляет собой точность сигналов датчиков от, по меньшей мере, двух систем датчиков. Таким образом, если требуется очень точное управление сельскохозяйственным транспортным средством, используется алгоритм обработки сигналов датчиков, который использует наиболее точные сигналы датчиков. В альтернативном предпочтительном примере осуществления этот, по меньшей мере, один характерный параметр представляет собой шум в сигналах датчиков, по меньшей мере, двух систем датчиков. Таким образом, если требуется очень точное управление сельскохозяйственным транспортным средством, используется алгоритм обработки сигналов датчиков, который использует сигналы датчиков с наименьшим шумом. В альтернативном предпочтительном примере осуществления этот, по меньшей мере, один характерный параметр представляет собой наличие сигналов датчиков от, по меньшей мере, двух систем датчиков. Таким образом, если отсутствуют отдельные сигналы датчиков, система управления выбирает алгоритм обработки сигналов датчиков, который не требует этого отсутствующего сигнала датчиков для управления сельскохозяйственным транспортным средством. В альтернативном предпочтительном примере осуществления этот, по меньшей мере, один характерный параметр представляет собой актуальность сигналов датчиков от, по меньшей мере, двух систем датчиков. Таким образом, если требуется наиболее оперативное управление сельскохозяйственным транспортным средством, используется алгоритм обработки сигналов датчиков, который использует наиболее актуальные сигналы датчиков. В альтернативном предпочтительном примере осуществления этот, по меньшей мере, один характерный параметр представляет собой затраты, связанные с получением или генерированием сигналов датчиков от, по меньшей мере, двух систем датчиков. При этом для генерирования сигнала управления система управления всегда выбирает алгоритм обработки сигналов датчиков, который использует сигналы датчиков с самыми низкими затратами, в наилучшем случае - сигналы датчиков, не требующие затрат. В альтернативном предпочтительном примере осуществления этот, по меньшей мере, один характерный параметр представляет собой время, необходимое для получения или генерирования сигналов датчиков от, по меньшей мере, двух систем датчиков. При этом система управления всегда выбирает алгоритм обработки сигналов датчиков, использующий сигналы датчиков, которые поступают наиболее быстрым и/или наиболее адекватным образом. В альтернативном предпочтительном примере осуществления этот, по меньшей мере, один характерный параметр представляет собой погодные условия вокруг сельскохозяйственного транспортного средства. При этом система управления всегда выбирает алгоритм обработки сигналов датчиков, в котором наименее велико влияние погодных условий, воздействующих на отдельные сигналы датчиков от отдельных систем датчиков, и/или который наилучшим образом компенсирует это воздействие на сигналы датчиков от отдельных систем датчиков. В альтернативном предпочтительном примере осуществления этот, по меньшей мере, один характерный параметр представляет собой почвенные условия вокруг сельскохозяйственного транспортного средства. При этом система управления всегда выбирает алгоритм обработки сигналов датчиков, в котором наименее велико влияние почвенных условий, воздействующих на отдельные сигналы датчиков от отдельных систем датчиков, и/или который наилучшим образом компенсирует это воздействие на сигналы датчиков от отдельных систем датчиков. В альтернативном предпочтительном примере осуществления этот, по меньшей мере, один характерный параметр представляет собой надежность сигналов датчиков от, по меньшей мере, двух систем датчиков. Таким образом, если надежность отдельных сигналов датчиков недостаточна, система управления выбирает для управления сельскохозяйственным транспортным средством тот алгоритм обработки сигналов датчиков, который не требует сигнала датчиков, не обладающего достаточной надежностью. В данном контексте под надежностью имеется в виду то, что, хотя сигнал датчика доступен, он не отражает действительных условий и поэтому имеет низкую надежность. Это может быть вызвано, например, неправильным измерением и/или другими обстоятельствами, такими как значительное запыление, которое оказывает негативное влияние на сигналы датчика в зоне записи оптического датчика, выполненного в виде камеры. В альтернативном предпочтительном примере осуществления этот, по меньшей мере, один характерный параметр представляет собой работу, которая должна быть выполнена при использовании системы управления. При этом система управления всегда выбирает алгоритм обработки сигналов датчиков, который даст наилучший результат для конкретной работы. В альтернативном предпочтительном примере осуществления этот, по меньшей мере, один характерный параметр представляет собой безопасность транспортного средства. При этом система управления всегда выбирает алгоритм обработки сигналов, который будет наилучшим образом защищать рабочее транспортное средство. В альтернативном предпочтительном примере осуществления этот, по меньшей мере, один характерный параметр содержит комбинацию параметров, указанных в вариантах осуществления, которые описаны выше. Предпочтительно в системе управления сохранено множество характерных параметров, так что в соответствии с ситуацией во время использования сельскохозяйственного транспортного средства может использоваться параметр, наиболее подходящий для превалирующей ситуации. В данном случае характерные параметры могут использоваться взвешенным образом, причем вес характерных параметров может быть изменен в соответствии с ситуацией, так что при работе сельскохозяйственного транспортного средства всегда можно достичь наилучших рабочих результатов. Предпочтительно, система управления по изобретению имеет такую структуру, что, по меньшей мере, две системы датчиков выполнены в виде оптического датчика, например в виде камеры, и в виде датчика глобальной системы определения положения (GPS-датчика) для распознавания маршрута, и предусмотрена, по меньшей мере, одна дополнительная система датчиков, выполненная в виде датчика инфракрасного излучения и/или в виде термического датчика, для определения характеристик культуры, при этом сигналы датчиков от систем датчиков распознавания маршрута и сигналы датчиков от, по меньшей мере, одной системы датчиков определения характеристик культуры комбинируются и сохраняются с возможностью их восстановления. Такая система управления используется, например, для точного обследования поверхности с записью не только объема урожая, но также и количества питательного продукта, собираемого с поля, так что эти записанные данные могут быть использованы для точного определения количества удобрений на последующем рабочем этапе. В альтернативном примере осуществления система управления по изобретению предпочтительно имеет такую структуру, что, по меньшей мере, две системы датчиков выполнены в виде оптического датчика, например, в виде камеры, и в виде обладающего низкой точностью датчика глобальной системы определения положения (GPS-датчика), причем сигналы датчиков от, по меньшей мере, двух систем датчиков используются для распознавания маршрута на основе полосы, пройденной на поле. В такой системе управления для распознавания маршрута с привязкой к пройденной на поле полосе требования к точности невысоки, поскольку ширина полосы относительно мала по отношению к ширине устройства регистрации культуры. Поэтому здесь можно использовать сигнал обладающего низкой точностью датчика глобальной системы определения положения, который, хотя и не так точен, может использоваться бесплатно. В альтернативном примере осуществления система управления по изобретению предпочтительно имеет такую структуру, что, по меньшей мере, две системы датчиков выполнены в виде оптического датчика, например в виде камеры, и в виде датчика глобальной системы определения положения (GPS-датчика), причем сигналы датчиков, по меньшей мере, двух систем датчиков используются для распознавания маршрута на основе кромки культуры и/или для распознавания маршрута с привязкой к кромке рабочего прохода. В такой системе управления для распознавания маршрута с привязкой к кромке культуры и/или кромке рабочего прохода предъявляются высокие требования к точности, поскольку имеющаяся в распоряжении рабочая ширина сельскохозяйственного транспортного средства должна использоваться по возможности максимально для обеспечения уборки культуры с наименьшими возможными затратами. В альтернативном примере осуществления система управления по изобретению предпочтительно имеет такую структуру, что, по меньшей мере, две системы датчиков выполнены в виде оптического датчика, например в виде камеры, и в виде датчика глобальной системы определения положения (GPS-датчика), причем сигналы от датчика глобальной системы определения положения используются для распознавания следования по пути, а сигналы от оптического датчика используются для корректировки сигнала управления от системы датчиков распознавания следования по пути. В такой системе распознавания следования по пути сигналы GPS-датчика, используемые в основном для распознавания следования по пути, оптимальным образом адаптируются к локальным условиям путем коррекции посредством сигналов от оптического датчика, лучше отражающим локальные условия. Если сигналы от оптического датчика недоступны по ситуации или не обладают достаточным качеством, система распознавания следования по пути может продолжать действовать без проблем на основе сигналов только от GPS-датчика. В альтернативном примере осуществления система управления по изобретению предпочтительно имеет такую структуру, что, по меньшей мере, две системы датчиков выполнены в виде датчика глобальной системы определения положения (GPS-датчика) и в виде датчика определения локального положения (LPS-датчика), причем сигналы датчика глобальной системы определения положения используются для определения положения датчика определения локального положения, а сигналы датчика определения локального положения используются для распознавания маршрута в системе ведения по маршруту. В такой системе управления очень точные и дорогостоящие сигналы датчика глобальной системы определения положения нужны только на короткое время для определения положения датчика определения локального положения, так что затраты на их использование невелики. Дальнейшее распознавание маршрута выполняется системой датчиков определения локального положения, использование которой не требует затрат. В альтернативном примере осуществления система управления по изобретению предпочтительно имеет такую структуру, что, по меньшей мере, две системы датчиков выполнены в виде датчика глобальной системы определения положения (GPS-датчика) и в виде датчика определения локального положения (LPS-датчика), причем сигналы датчика глобальной системы определения положения используются для определения положения датчика определения локального положения, а сигналы датчика определения локального положения используются для разработки плана маршрутов. Разработанный таким образом план маршрутов используется, например, на последующих рабочих этапах, например, при внесении на поле удобрений для управления используемым в этом случае сельскохозяйственным транспортным средством при ведении по маршруту. В такой системе управления очень точные и дорогостоящие сигналы датчика глобальной системы определения нужны только на короткое время для определения положения датчика определения локального положения, так что затраты на их использование невелики. Дальнейшее распознавание маршрута выполняется системой датчиков определения локального положения, использование которой не требует затрат. В альтернативном примере осуществления система управления по изобретению предпочтительно имеет такую структуру, что, по меньшей мере, две системы датчиков выполнены в виде оптического датчика, например в виде камеры, и в виде датчика глобальной системы определения положения (GPS-датчика), причем сигналы оптического датчика используются для распознавания маршрута во время рабочего прохода, а сигналы датчика глобальной системы определения положения используются для распознавания маршрута на поворотной полосе. В альтернативном примере осуществления система управления по изобретению предпочтительно имеет такую структуру, что, по меньшей мере, две системы датчиков выполнены в виде датчика измерения пройденного пути (одометра) и в виде датчика глобальной системы определения положения (GPS-датчика), причем сигналы датчика измерения пройденного пути используются для определения положения сельскохозяйственного транспортного средства и, при использовании вместе с планом маршрутов, распознавания его маршрута, а сигналы датчика глобальной системы определения положения используются для распознавания маршрута, при этом выбор того, какой из алгоритмов обработки сигналов датчиков должен использоваться для системы датчиков распознавания маршрута, производится в зависимости от одного или нескольких характерных параметров. В альтернативном примере осуществления система управления по изобретению предпочтительно имеет такую структуру, что, по меньшей мере, две системы датчиков выполнены в виде системы датчиков для распознавания культуры сверху и в виде системы датчиков для распознавания культуры в области вблизи земли, причем обе системы датчиков используются для распознавания маршрута, и предусмотрена, по меньшей мере, одна дополнительная система датчиков, выполненная в виде датчика ветра для определения силы и/или направления ветра, при этом выбор того, какой из алгоритмов обработки сигналов датчиков должен быть использован для системы датчиков распознавания маршрута, производится в зависимости от сигнала датчиков от системы датчиков ветра. Предпочтительно система датчиков для распознавания культуры сверху выполнена в виде оптического датчика, например в виде камеры и/или в виде датчика глобальной системы определения положения (GPS-датчика), а система датчиков для распознавания культуры в области вблизи земли предпочтительно выполнена в виде механического манипулятора и/или в виде оптического датчика, например, в виде камеры. Такая система управления используется, например, для распознавания маршрута на кукурузном поле с помощью системы с камерой, распознающей растения кукурузы сверху. Однако при сильном ветре растения пригибаются настолько, что система распознавания маршрута будет направлять транспортное средство по направлению пригиба. Для предотвращения этого при сильном ветре используются сигналы датчиков от системы для распознавания культуры в области вблизи земли, причем эта система также может быть выполнена, например, в виде оптического датчика, то есть камеры, и распознавать стебли отдельных рядов растений. За счет этого надлежащим образом оптимизируется процесс распознавания маршрута, что обеспечивает оптимальный рабочий проход сельскохозяйственного транспортного средства. В альтернативном примере осуществления система управления по изобретению предпочтительно имеет такую структуру, что, по меньшей мере, две системы датчиков выполнены в виде системы датчиков для детектирования культуры сверху и в виде системы датчиков для детектирования культуры в области вблизи земли, причем обе системы датчиков используются для распознавания маршрута, и предусмотрена, по меньшей мере, одна дополнительная система датчиков, выполненная в виде датчика ветра для определения силы и/или направления ветра, при этом сигналы датчиков от системы датчиков для детектирования культуры сверху подвергаются воздействию сигналов датчиков от системы датчиков для детектирования культуры в области вблизи земли, а степень воздействия изменяется в зависимости от сигналов датчиков от системы датчиков ветра. Предпочтительно система датчиков для детектирования культуры сверху выполнена в виде оптического датчика, например в виде камеры и/или в виде датчика глобальной системы определения положения (GPS-датчика), а система датчиков для детектирования культуры в области вблизи земли предпочтительно выполнена в виде механического манипулятора и/или в виде оптического датчика, например в виде камеры. Такая система управления используется, например, для распознавания маршрута на кукурузном поле с помощью системы датчиков с камерой, детектирующей растения кукурузы сверху. Однако при сильном ветре растения пригибаются настолько, что система распознавания маршрута будет направлять транспортное средство по направлению пригиба. Для предотвращения этого при сильном ветре придается большее значение сигналам датчиков системы для детектирования культуры в области вблизи земли, причем эта система также может быть выполнена, например, в виде оптического датчика, то есть камеры, и распознавать стебли отдельных рядов растений. За счет этого надлежащим образом оптимизируется процесс распознавания маршрута, что обеспечивает оптимальный рабочий проход сельскохозяйственного транспортного средства. В альтернативном примере осуществления сигналы датчиков от систем датчиков стандартизованы для обработки сигналов в, по меньшей мере, одном первом и/или, по меньшей мере, одном втором алгоритме обработки сигналов. Для того чтобы различные алгоритмы обработки сигналов датчиков могли надежным и оптимальным образом обрабатывать различные сигналы датчиков, по меньшей мере, от двух систем датчиков, в предпочтительном варианте осуществления изобретения сигналы датчиков стандартизованы, так что они могут сравниваться и обрабатываться соответствующим образом. Следует отметить, что система управления по изобретению не ограничивается системой ведения по маршруту, а может содержать любые типы систем управления сельскохозяйственным транспортным средством. Краткий перечень чертежей Далее со ссылками на прилагаемые чертежи будут подробно описаны примеры осуществления изобретения. На чертежах: фиг.1 схематично изображает на виде сбоку сельскохозяйственное транспортное средство с системой управления по изобретению в первом примере выполнения; фиг.2 схематично изображает на виде сбоку сельскохозяйственное транспортное средство с системой управления по изобретению во втором примере выполнения; фиг.3 схематично изображает на виде сбоку сельскохозяйственное транспортное средство с системой управления по изобретению в третьем примере выполнения; фиг.4 изображает блок-схему, иллюстрирующую интеграцию датчиков по изобретению. Осуществление изобретения На фиг.1 показано в качестве примера сельскохозяйственное транспортное средство 1, выполненное в виде комбайна 32, с передним навесным аппаратом 33 в виде жатвенного аппарата 34. В рамках изобретения передний навесной аппарат 33 может быть выполнен любым образом. В частности, этот передний навесной аппарат 33 может быть выполнен в виде кукурузной жатки или подборщика. Известный из уровня техники комбайн 32 оснащен приводной ходовой осью 35 с колесами 13 и управляемой ходовой осью 36, которая кинематически соединена известным образом с цилиндром 9 рулевого управления контура 5 рулевого управления. Оператор 12 комбайна 32 может с помощью известных средств управлять давлением в цилиндре 9 рулевого управления, используя для этого рулевое колесо 11 в кабине 10, и таким образом осуществлять рулевое управление комбайном 32. Комбайн 32 снабжен на крыше кабины так называемым GPS-датчиком 15, который генерирует сигналы 19 датчиков о положении комбайна 32 на основе GPS из сигналов 17 положения, получаемых от спутниковой GPS-системы 18 при подсоединении к устройству управления, выполненному в виде устройства 31 обработки данных. Эти сигналы 19 датчиков о положении комбайна 32 могут использоваться известным образом для регистрации рабочего маршрута, проходимого комбайном 32. Автоматическое рулевое управление комбайном 32 на основе GPS осуществляется традиционно таким образом, что в простейшем случае определяемый на основе GPS рабочий маршрут комбайна 32 сравнивается с теоретическим маршрутом, сохраненным в устройстве 31 обработки данных. Если определенный таким образом рабочий маршрут отклоняется от теоретического маршрута, в устройстве 31 обработки данных генерируются направляющие сигналы 22, которые автоматически воздействуют на контур 5 рулевого управления и вызывают приведение действительного маршрута в соответствие с теоретическим маршрутом посредством регулирования цилиндра 9 рулевого управления. Согласно изобретению GPS-датчик 15 образует первую систему распознавания маршрута системы ведения по маршруту. Следующая система распознавания маршрута в показанном примере осуществления содержит систему 26 распознавания изображений, расположенную на крыше кабины 10 транспортного средства. Эта система 26 распознавания изображений детектирует сверху не показанную здесь культуру и связана с устройством 31 обработки данных таким образом, что сигналы 28 датчика изображений передаются на устройство 31 обработки данных. На основе сигналов 28 датчика изображений устройство 31 обработки данных генерирует направляющие сигналы 22, причем это устройство 31 обработки данных выполнено таким образом, что осуществляет автоматическое рулевое управление комбайном 32 путем автоматического воздействия на контур 5 рулевого управления таким же образом, как и система распознавания маршрута на основе GPS. В любом положении жатвенного аппарата 34 предусмотрена следующая система 40 распознавания изображений, которая детектирует культуру в области вблизи земли (не показано). Сигналы 41 датчиков от системы 40 распознавания изображений также передаются на устройство 31 обработки данных, которое может подобным же образом генерировать из них направляющие сигналы 22 для контура 5 рулевого управления. Кроме того, комбайн 32 снабжен датчиком 37 ветра, который детектирует как направление, так и силу ветра и передает сгенерированные сигналы 44 датчика ветра на устройство 31 обработки данных. В устройстве 31 обработки данных сохранено несколько алгоритмов обработки сигналов датчиков, причем это устройство 31 обработки данных решает, какой алгоритм обработки сигналов датчиков используется, например, для ведения по маршруту, то есть для генерирования направляющих сигналов 22, в зависимости от характерных параметров. Показанный комбайн 32 может управляться, например, с помощью сигналов 19 датчика положения, генерируемых GPS-датчиком. Однако сигналы 28 датчика изображений, генерируемые системой 26 распознавания изображений, всегда дают намного более точное изображение подлежащей обработке территории 46, так что устройство 31 обработки данных принимает решение, на основе точности, заданной в качестве характерного параметра, выбрать алгоритм обработки сигналов датчика, где вместо сигналов 19 положения от GPS-датчика для генерирования направляющего сигнала 22 используются сигналы 28 датчика изображений от системы 26 распознавания изображений. В другом примере осуществления комбайн 32 управляется с помощью сигналов 28 датчика изображений, генерируемых системой 26 распознавания изображений. Используя сигналы 44 датчика ветра, генерируемые датчиком 37 ветра, устройство 31 обработки данных принимает решение выбрать алгоритм обработки сигналов датчиков, который использует сигналы 41 датчика изображений от системы 40 распознавания изображений вблизи земли для корректировки сигналов 28 датчика изображений, тем самым обеспечивая более точный рабочий проход комбайна 32 даже в тех местах, где культура пригнута сильным ветром, например, при скорости ветра выше 5 м/с. На фиг.2 показано в качестве примера сельскохозяйственное транспортное средство 1, выполненное в виде силосоуборочного комбайна 38, с передним навесным аппаратом 33 в виде кукурузной жатки 39. В рамках изобретения передний навесной аппарат 33 может быть выполнен любым образом. В частности, этот передний навесной аппарат 33 может быть выполнен в виде подборщика кукурузы, жатвенного или собирающего аппарата для зерновых. Известный из уровня техники силосоуборочный комбайн 38 оснащен приводной ходовой осью 35 с колесами 13 и управляемой ходовой осью 36 с колесами 14, которая кинематически соединена известным образом с цилиндром 9 рулевого управления контура 5 рулевого управления. Оператор силосоуборочного комбайна 38 может с помощью известных средств управлять давлением в цилиндре 9 рулевого управления, используя для этого рулевое колесо 11 в кабине 10, и таким образом осуществлять рулевое управление силосоуборочным комбайном 38. Силосоуборочный комбайн 38 снабжен на крыше кабины так называемым GPS-датчиком 15, который генерирует сигналы 19 датчиков о положении силосоуборочного комбайна 38 на основе GPS из сигналов 17 положения, получаемых от спутниковой GPS-системы 18 при подсоединении к устройству управления, выполненному в виде устройства 31 обработки данных. Эти сигналы 19 датчиков о положении силосоуборочного комбайна 38 могут использоваться известным образом для регистрации рабочего маршрута, проходимого силосоуборочным комбайном 38. Автоматическое рулевое управление силосоуборочным комбайном 38 на основе GPS осуществляется традиционно таким образом, что в простейшем случае определяемый на основе GPS рабочий маршрут силосоуборочного комбайна 38 сравнивается с теоретическим маршрутом, сохраненным в устройстве 31 обработки данных. Если определенный таким образом рабочий маршрут отклоняется от теоретического маршрута, в устройстве 31 обработки данных генерируются направляющие сигналы 22, которые автоматически воздействуют на контур 5 рулевого управления и вызывают приведение действительного маршрута в соответствие с теоретическим маршрутом посредством регулирования цилиндра 9 рулевого управления. Согласно изобретению GPS-датчик 15 образует первую систему распознавания маршрута системы ведения по маршруту. Следующая система распознавания маршрута в показанном примере осуществления содержит систему 26 распознавания изображений, расположенную спереди кабины 10 транспортного средства. Эта система 26 распознавания изображений детектирует сверху культуру 42 и связана с устройством 31 обработки данных таким образом, что сигналы 28 датчика изображений передаются на устройство 31 обработки данных. На основе сигналов 28 датчика изображений устройство 31 обработки данных генерирует направляющие сигналы 22, которые могут обеспечивать автоматическое рулевое управление силосоуборочным комбайном 38 путем автоматического воздействия на контур 5 рулевого управления таким же образом, как и система распознавания маршрута на основе GPS. В любом положении, например, в центральном положении кукурузной жатки 39 при рассмотрении в поперечном направлении относительно направления движения, предусмотрена следующая система 40 распознавания изображений, которая детектирует культуру 42 в области вблизи земли. Центральный разделительный гребень кукурузной жатки 39 или ее центральный наконечник может использоваться в качестве подходящего расположения для установки системы 40 распознавания изображений, поскольку в процессе уборки именно в этом месте растения кукурузы начинают подаваться в наружные стороны при проходе через кукурузную жатку 39, так что система 40 распознавания изображений может очень отчетливо детектировать ряд растений перед ней. Сигналы 41 датчиков от системы 40 распознавания изображений также передаются на устройство 31 обработки данных, которое может подобным же образом генерировать из них направляющие сигналы 22 для контура 5 рулевого управления. Кроме того, силосоуборочный комбайн снабжен датчиком 37 ветра, который детектирует как направление, так и силу ветра и передает сгенерированные сигналы 44 датчика ветра на устройство 31 обработки данных. На верхней разгрузочной трубе 47 силосоуборочного комбайна 38 расположен датчик 43 характеристик культуры, который может быть выполнен в виде, например, датчика ближней ИК-области спектра или в виде термического датчика. Сигналы 45 датчика характеристик культуры, генерируемые датчиком 43 характеристик культуры, также передаются на устройство 31 обработки данных. В устройстве 31 обработки данных сохранено несколько алгоритмов обработки сигналов датчиков, причем это устройство 31 обработки данных решает, какой алгоритм обработки сигналов датчиков используется, например, для ведения по маршруту, то есть для генерирования направляющих сигналов 22, или для разведки поверхности в зависимости от характерных параметров. Показанный силосоуборочный комбайн 38 может управляться, например, с помощью сигналов 19 датчика положения, генерируемых GPS-датчиком. Однако сигналы 28 датчика изображений, генерируемые системой 26 распознавания изображений, всегда дают намного более точное изображение подлежащей обработке территории 46, так что устройство 31 обработки данных принимает решение на основе точности, заданной в качестве характерного параметра, где вместо сигналов 19 положения от GPS-датчика для генерирования направляющего сигнала 22 используются сигналы 28 датчика изображений от системы 26 распознавания изображений. В другом примере осуществления силосоуборочный комбайн 38 управляется с помощью сигналов 28 датчика изображений, генерируемых системой 26 распознавания изображений. Используя сигналы 44 датчика ветра, генерируемые датчиком 37 ветра, устройство 31 обработки данных принимает решение выбрать алгоритм обработки сигналов датчиков, который, в свою очередь, решает, на основе полученных сигналов 44 датчика ветра, использовать сигналы 41 датчика изображений от системы 40 распознавания изображений вблизи земли для генерирования направляющих сигналов 22, поскольку сигналы датчиков этой системы более точно представляют стебли культуры 42, предназначенной для срезания. За счет этого обеспечивается оптимальный рабочий проход силосоуборочного комбайна 38, даже если культура пригнута сильным ветром, например, при скорости ветра выше 5 м/с. В следующем примере осуществления в устройстве 31 обработки данных выбирается алгоритм обработки сигналов датчиков на основании характерного параметра, сигнал 19 датчика положения от GPS-датчика корректируется сигналом 28 датчиков изображения от системы 26 распознавания изображений, где корректирование системы происходит с целью генерирования направляющих сигналов 22. Кроме того, сигналы 45 характеристик культуры, генерируемые датчиком 43 характеристик культуры, увязываются с соответствующими скорректированными сигналами положения и сохраняются в устройстве 31 обработки данных, так что они могут быть вызваны в качестве карты поверхности с привязанной к ней информацией о характеристиках культуры. В следующем примере выполнения силосоуборочного комбайна 38 система 26 распознавания изображений детектирует культуру 42 сверху, при этом генерируются сигналы 28 датчиков изображений, с помощью которых устройство 31 обработки данных может прогнозировать урожай убираемой культуры. В соответствии с сигналами 19 GPS-датчика 15 положения устройство 31 обработки данных выдает управляющие сигналы для разгрузочной трубы 47 силосоуборочного комбайна 38, так что обеспечивается оптимальная перегрузка на грузовые машины, движущиеся рядом с силосоуборочным комбайном 38 или позади него. Дополнительно возможен вариант, в котором на разгрузочной трубе 47 расположена дополнительная система распознавания изображений (не показана), которая может определять уровень заполнения грузовых машин. Устройство 31 обработки данных выбирает алгоритм обработки сигналов датчиков, который управляет разгрузочной трубой 47 в зависимости от уровня заполнения грузовой машины таким образом, что в зависимости от ожидаемого урожая убираемой культуры и уровня заполнения наблюдаемой грузовой машины разгрузочная труба 47 будет переводиться для загрузки другой грузовой машины, движущейся рядом с силосоуборочным комбайном 38 или позади него. Таким образом предотвращается ситуация, когда при высоком урожае грузовая машина нагружается до такого уровня, что разгрузочную трубу 47 приходится поворачивать к другой грузовой машине с большими потерями убранной массы. На фиг.3 показано в качестве примера сельскохозяйственное транспортное средство 1, выполненное в виде трактора 2, к которому сзади присоединен рабочий аппарат 3 в виде разбрасывателя 4 навоза. В рамках изобретения рабочий аппарат 3 может быть выполнен любым образом и присоединен к сельскохозяйственному транспортному средству 1 в любой точке. В качестве примера рабочий аппарат 3 может быть выполнен в виде культиватора, рыхлителя, разбрызгивателя гербицидов или в виде односекционной или многосекционной жатки, присоединенной к трактору в различных положениях. Известный из уровня техники трактор 2 оснащен гидравлическим контуром 5 рулевого управления, который известным образом функционально соединен с цилиндрами 8, 9 рулевого управления, предназначенными для управления передней ходовой осью 6 и/или задней ходовой осью 7 и/или колесами 13, 14. Оператор 12 трактора 2 может с помощью известных средств управлять давлением в цилиндрах 8, 9 рулевого управления, используя для этого рулевое колесо 11 в кабине 10, и таким образом осуществлять рулевое управление трактором. При этом в зависимости от выполнения контура 5 рулевого управления могут управляться только колеса 13 передней ходовой оси 6, колеса 13, 14 передней и задней ходовых осей 6, 7 совместно или каждое колесо 13, 14 отдельно. Трактор 2 снабжен на крыше кабины так называемым GPS-датчиком 15, который при подсоединении к устройству 16 обработки данных генерирует сигналы 19 датчиков о положении трактора 2 на основе GPS из сигналов 17 положения, получаемых от спутниковой GPS-системы 18. Эти сигналы 19 датчиков о положении трактора 2 используются известным образом для регистрации рабочего маршрута 20, проходимого трактором 2. Автоматическое рулевое управление трактором 2 на основе GPS осуществляется традиционно таким образом, что в простейшем случае определяемый на основе GPS рабочий маршрут 20 трактора 2 сравнивается с теоретическим маршрутом 21, сохраненным в устройстве 16 обработки данных. Если определяемый рабочий маршрут 20 отклоняется от теоретического маршрута 21, в устройстве 16 обработки данных генерируются направляющие сигналы 22, которые автоматически воздействуют на контур 5 рулевого управления и вызывают приведение действительного маршрута 20 в соответствие с теоретическим маршрутом 21 посредством регулирования цилиндров 8, 9 рулевого управления. Согласно изобретению GPS-датчик 15 и соответствующее устройство 16 обработки данных образуют первую систему 23 распознавания маршрута системы 24 ведения по маршруту, которая в дополнение к уже описанным GPS-датчику 15, устройству 16 обработки данных и контуру 5 рулевого управления снабжена, по меньшей мере, одной дополнительной системой 25 распознавания маршрута. В показанном примере осуществления дополнительная система 25 распознавания маршрута содержит расположенную спереди трактора 2 систему 26 распознавания изображений, которая связана с устройством 27 обработки данных таким образом, что сигналы 28 датчиков изображений преобразуются в устройстве 27 обработки данных в реальные изображения 29 регистрируемой территории 46 и, при необходимости, представляются визуально. Кроме того, предназначенное для системы 26 распознавания изображений устройство 27 обработки данных генерирует направляющие сигналы 30, которые могут обеспечивать автоматическое рулевое управление трактором 2 путем автоматического воздействия на контур 5 рулевого управления таким же образом, как и система 23 распознавания маршрута на основе GPS. Общее устройство 31 обработки данных, в котором сохранено несколько алгоритмов обработки сигналов, привязано к двум системам 23, 25 распознавания маршрута. В другом примере осуществления (не показан) сельскохозяйственное транспортное средство представляет собой машину для уборки сахарной свеклы. Она оснащена, например, системой распознавания изображений, которая детектирует сахарную свеклу сверху. Дополнительно машина для уборки сахарной свеклы снабжена системой распознавания изображений, которая детектирует сахарную свеклу вблизи земли. Во время уборки, например, из-за сильной запыленности может создаться ситуация, при которой сигнал датчика изображений от верхней системы распознавания изображений очень точно детектирует ряды сахарной свеклы, но из-за пыли сигнал очень неустойчив, например, сильно зашумлен. Присутствие, например, сильных сорняков между отдельными растениями сахарной свеклы, может приводить к тому, что сигнал датчика изображений от нижней системы распознавания изображений очень устойчив и содержит мало шума, но весьма неточен из-за сорняков. Если характерным параметром является точность сигналов датчиков, то система управления выбрала бы алгоритм обработки сигналов датчиков, который в основном использует сигналы датчиков изображений от верхней системы распознавания изображений. Если характерным параметром является шум в сигналах датчиков, то система управления выбрала бы алгоритм обработки сигналов датчиков, который в основном использует сигналы датчиков изображений от нижней системы распознавания изображений. Поскольку в системе управления сохранено несколько характерных параметров, и система управления использует их взвешенным образом, то описанная в качестве примера система управления выберет алгоритм обработки сигналов датчиков, который использует сигналы датчиков от обеих систем распознавания изображений, так что компромисс обеспечит получение оптимального результата уборки урожая. Следует подчеркнуть, что упомянутые примеры выполнения сельскохозяйственных машин не являются исчерпывающими или ограничивающими. Описанные примеры осуществления изобретения могут использоваться в других сельскохозяйственных рабочих машинах при соответствующей адаптации. На фиг.4 в целях иллюстрации показана блок-схема системы управления. Сигнал А датчика может быть сигналом 19 датчика положения, генерируемым GPS-датчиком 15 в соответствии с примером выполнения по фиг.1, и передается на устройство 31 обработки данных. Сигнал В датчика в соответствии с примером выполнения по фиг.1 может быть сигналом 28 датчика изображений, генерируемым системой 26 распознавания изображений, и также передается на устройство 31 обработки данных. В устройстве 31 обработки данных имеются, например, пять алгоритмов I, II, III, IV, V обработки сигналов датчиков, которые могут обрабатывать сигналы А, В датчиков различными способами. Так, например, первый алгоритм I обработки сигналов датчиков решен таким образом, что выбирает, по меньшей мере, один сигнал А или В датчиков для обработки сигналов. Второй алгоритм II обработки сигналов датчиков решен, например, так, что уравнивает два сигнала А и В датчиков друг с другом. Третий алгоритм III обработки сигналов датчиков решен, например, так, что один сигнал А датчика используется для корректировки другого сигнала В. Четвертый алгоритм IV обработки сигналов датчиков решен, например, так, что переключается между двумя сигналами А и В датчиков в зависимости от общих условий. Пятый алгоритм V обработки сигналов датчиков решен, например, так, что один алгоритм I обработки сигналов датчиков комбинируется с другим алгоритмом II обработки сигналов датчиков для генерирования сигнала S управления. Выбор производится в устройстве 31 обработки данных на основании характерных параметров Р. Такими параметрами могут быть точность сигнала S управления, генерируемого алгоритмами I, II, III, IV, V обработки сигналов датчиков и/или точность сигналов А, В датчиков и/или шум в сигналах А, В датчиков и/или наличие сигналов А, В датчиков и/или актуальность сигналов А, В датчиков и/или затраты, связанные с получением или генерированием сигналов А, В датчиков, и/или время, необходимое для получения или генерирования сигналов А, В датчиков, и/или погодные условия вокруг транспортного средства, и/или почвенные условия вокруг транспортного средства, и/или надежность сигналов А, В датчиков, и/или работа, которая должна быть выполнена системой управления, и/или безопасность транспортного средства. В зависимости от этих характерных параметров из имеющихся алгоритмов I, II, III, IV, V обработки сигналов датчиков для генерирования сигнала S управления производится выбор для достижения наилучшего возможного результата в соответствии с ситуацией. ФОРМУЛА ИЗОБРЕТЕНИЯ1. Система управления для сельскохозяйственного транспортного средства (1), содержащая, по меньшей мере, две системы (15, 26, 37, 40, 43) датчиков, которые генерируют сигналы (А, В, 19, 28, 41, 44, 45) датчиков, причем указанные сигналы (А, В, 19, 28, 41, 44, 45) датчиков зависят от транспортного средства или от характеристик культуры или от окружающей среды или от комбинации перечисленных факторов, отличающаяся тем, что система управления выполнена с возможностью обработки сигналов датчиков посредством, по меньшей мере, одного первого и, по меньшей мере, одного второго алгоритмов (I, II, III, IV, V) обработки сигналов датчиков, и с возможностью выбора подлежащего использованию алгоритма (I, II, III, IV, V) обработки сигналов датчиков в зависимости, по меньшей мере, от одного характерного параметра (Р). 2. Система по п.1, отличающаяся тем, что выполнена с возможностью: а. выбора для обработки сигналов, по меньшей мере, одного сигнала (А, В, 19, 28, 41, 44, 45) датчиков от, по меньшей мере, двух систем (15, 26, 37, 40, 43) датчиков, посредством алгоритма (I) обработки сигналов датчиков,b. уравнивания друг с другом, по меньшей мере, двух сигналов (А, В, 19, 28, 41, 44, 45) датчиков от, по меньшей мере, двух систем (15, 26, 37, 40, 43) датчиков посредством алгоритма (II) обработки сигналов, с. использования сигнала (А, В, 19, 28, 41, 44, 45) датчиков от, по меньшей мере, одной системы (15, 26, 37, 40, 43) датчиков для корректировки сигнала (А, В, 19, 28, 41, 44, 45) датчиков от второй системы (15, 26, 37, 40, 43) датчиков посредством алгоритма (III) обрабатки сигналов,d. осуществления переключения между сигналами (А, В, 19, 28, 41, 44, 45) датчиков от, по меньшей мере, двух систем (15, 26, 37, 40, 43) датчиков в зависимости от общих условий посредством алгоритма (IV) обработки сигналов датчиков,е. и тем, что в алгоритме (V) обработки сигналов датчиков скомбинирован, по меньшей мере, один алгоритм (I, II, III, IV) обработки сигналов датчиков, по меньшей мере, с одним другим алгоритмом (I, II, III, IV) обработки сигналов датчиков для генерирования сигнала (S) управления,причем система управления снабжена двумя или множеством алгоритмов (I, II, III, IV, V) обработки сигналов датчиков. 3. Система по п.1, отличающаяся тем, что, по меньшей мере, один характерный параметр (Р) представляет собой точность сигнала (S) управления, генерируемого алгоритмами (I, II, III, IV, V) обработки сигналов датчиков, точность сигналов (А, В, 19, 28, 41, 44, 45) датчиков от, по меньшей мере, двух систем (15, 26, 37, 40, 43) датчиков, шум в сигналах (А, В, 19, 28, 41, 44, 45) датчиков от, по меньшей мере, двух систем (15, 26, 37, 40, 43) датчиков, наличие сигналов (А, В, 19, 28, 41, 44, 45) датчиков от, по меньшей мере, двух систем (15, 26, 37, 40, 43) датчиков,актуальность сигналов (А, В, 19, 28, 41, 44, 45) датчиков от, по меньшей мере, двух систем (15, 26, 37, 40, 43) датчиков,затраты, связанные с получением или генерированием сигналов (А, В, 19, 28, 41, 44, 45) датчиков от, по меньшей мере, двух систем (15, 26, 37, 40, 43) датчиков,время, необходимое для получения или генерирования сигналов (А, В, 19, 28, 41, 44, 45) датчиков от, по меньшей мере, двух систем (15, 26, 37, 40, 43) датчиков,погодные условия вокруг транспортного средства (1), почвенные условия вокруг транспортного средства (1), надежность сигналов (А, В, 19, 28, 41, 44, 45) датчиков от, по меньшей мере, двух систем (15, 26, 37, 40, 43) датчиков,работу, которая должна быть выполнена при использовании системы управления, безопасность транспортного средства (1), или содержит комбинацию указанных параметров. 4. Система по п.3, отличающаяся тем, что в ней сохранено множество характерных параметров (Р) с возможностью их использования взвешенным образом, причем вес характерных параметров (Р) может быть изменен в соответствии с ситуацией. 5. Система по п.3 или 4, отличающаяся тем, что, по меньшей мере, две системы датчиков выполнены в виде оптического датчика, например, в виде камеры (26, 40), и в виде датчика (15) глобальной системы определения положения для распознавания маршрута, и предусмотрена, по меньшей мере, одна дополнительная система (43) датчиков, выполненная в виде датчика инфракрасного излучения и/или в виде термического датчика, для определения характеристик культуры, при этом обеспечена возможность сохранения в комбинации с возможностью восстановления сигналов (28, 41, 19) датчиков от систем датчиков распознавания маршрута и сигналов (45) датчиков от, по меньшей мере, одной системы датчиков определения характеристик культуры. 6. Система по п.3 или 4, отличающаяся тем, что, по меньшей мере, две системы датчиков выполнены в виде оптического датчика, например, в виде камеры (26, 40), и в виде обладающего низкой точностью датчика (15) глобальной системы определения положения, причем обеспечена возможность использования сигналов (28, 41, 19) датчиков от, по меньшей мере, двух систем датчиков для распознавания маршрута на основе полосы, пройденной на поле. 7. Система по п.3 или 4, отличающаяся тем, что, по меньшей мере, две системы датчиков выполнены в виде оптического датчика, например в виде камеры (26, 40), и в виде датчика (15) глобальной системы определения положения, причем обеспечена возможность использования сигналов (28, 41, 19) датчиков от, по меньшей мере, двух систем датчиков для распознавания маршрута на основе кромки культуры и/или для распознавания маршрута с привязкой к кромке рабочего прохода. 8. Система по п.3 или 4, отличающаяся тем, что, по меньшей мере, две системы датчиков выполнены в виде оптического датчика, например в виде камеры (26, 40), и в виде датчика (15) глобальной системы определения положения, причем обеспечена возможность использования сигналов (19) датчика (15) глобальной системы определения положения для распознавания следования по пути, и использования сигналов (28, 41) оптического датчика для корректировки сигнала управления от системы датчиков распознавания следования по пути. 9. Система по п.3 или 4, отличающаяся тем, что, по меньшей мере, две системы датчиков выполнены в виде датчика (15) глобальной системы определения положения и в виде датчика определения локального положения, причем обеспечена возможность использования сигналов (19) датчика (15) глобальной системы определения положения для определения положения датчика определения локального положения, а сигналов датчика определения локального положения для распознавания маршрута в системе ведения по маршруту. 10. Система по п.3 или 4, отличающаяся тем, что, по меньшей мере, две системы датчиков выполнены в виде датчика (15) глобальной системы определения положения и в виде датчика определения локального положения, причем обеспечена возможность использования сигналов (19) датчика (15) глобальной системы определения положения для определения положения датчика определения локального положения, и использования сигналов датчика определения локального положения для разработки плана маршрутов. 11. Система по п.3 или 4, отличающаяся тем, что, по меньшей мере, две системы датчиков выполнены в виде оптического датчика, например в виде камеры (26, 40), и в виде датчика (15) глобальной системы определения положения, причем обеспечена возможность использования сигналов (28, 41) оптического датчика для распознавания маршрута во время рабочего прохода, и использования сигналов (19) датчика (15) глобальной системы определения положения для распознавания маршрута на поворотной полосе. 12. Система по п.3 или 4, отличающаяся тем, что, по меньшей мере, две системы датчиков выполнены в виде датчика измерения пройденного пути и в виде датчика (15) глобальной системы определения положения (GPS-датчика), причем обеспечена возможность использования сигналов датчика измерения пройденного пути для определения положения сельскохозяйственного транспортного средства (1) и, при использовании вместе с планом маршрутов, распознавания маршрута, и использования сигналов (19) датчика (15) глобальной системы определения положения используются для распознавания маршрута, при этом выбор того, какой из алгоритмов обработки сигналов датчиков должен быть использован для системы датчиков распознавания маршрута, зависит от одного или множества характерных параметров (Р). 13. Система по п.3 или 4, отличающаяся тем, что, по меньшей мере, две системы датчиков выполнены в виде системы датчиков для детектирования культуры сверху и в виде системы датчиков для детектирования культуры в области вблизи земли, причем обеспечена возможность использования обеих систем датчиков для распознавания маршрута, и предусмотрена, по меньшей мере, одна дополнительная система датчиков, выполненная в виде датчика (37) ветра для определения силы и/или направления ветра, при этом выбор того, какой из алгоритмов обработки сигналов датчиков должен быть использован для системы датчиков распознавания маршрута, зависит от сигнала (44) датчиков от системы датчиков (37) ветра. 14. Система по п.3 или 4, отличающаяся тем, что, по меньшей мере, две системы датчиков выполнены в виде системы датчиков для детектирования культуры сверху и в виде системы датчиков для детектирования культуры в области вблизи земли, причем обеспечена возможность использования обеих систем датчиков для распознавания маршрута, и предусмотрена, по меньшей мере, одна дополнительная система датчиков, выполненная в виде датчика (37) ветра для определения силы и/или направления ветра, при этом сигналы датчиков от системы датчиков для детектирования культуры сверху подвергаются воздействию сигналов датчиков от системы датчиков для детектирования культуры в области вблизи земли, а степень воздействия изменяется в зависимости от сигналов (44) датчиков от системы датчиков (37) ветра. 15. Система по п.3 или 4, отличающаяся тем, что система датчиков для детектирования культуры сверху выполнена в виде оптического датчика, например в виде камеры (26), и/или в виде датчика (15) глобальной системы определения положения, а система датчиков для детектирования культуры в области вблизи земли выполнена в виде механического манипулятора и/или в виде оптического датчика, например в виде камеры (40), детектирующей культуру в области вблизи земли. 16. Система по п.1, отличающаяся тем, что сигналы (А, В, 19, 28, 41, 44, 45) датчиков от систем (15, 26, 37, 40, 43) датчиков стандартизованы для обработки сигналов в, по меньшей мере, одном первом и/или, по меньшей мере, одном втором алгоритме (I, II, III, IV, V) обработки сигналов. Популярные патенты: 2413409 Способ и устройство для уплотнения убранной массы для получения силоса ... для уплотнения, которые обеспечивают равномерное по всей поверхности и более интенсивное по сравнению с известными решениями уплотнение укладываемой отдельными слоями убранной массы для получения силоса в силосной траншее или наземном силосохранилище. В соответствии с изобретением решение поставленной задачи достигается за счет способа уплотнения и устройства для уплотнения, обладающих отличительными признаками по пунктам 1 и 6 формулы изобретения.Заявляемый способ уплотнения укладываемой отдельными слоями убранной массы для получения силоса в силосной траншее или наземном силосохранилище с использованием рабочей сельхозмашины, оснащенной уплотнительным устройством, ... 2054249 Способ зимовки открытопузырных рыб ... когда пузыри воздуха начинали выходить из-под льда через лунку. При таком способе зимовки выживаемость рыб в садках близка к нормативной (90%). Контрольная партия радужной форели была размещена в зимнем подледном садке, как и в опыте, но без воздушного колокола. Воздух в садок не подкачивали. При весеннем облове садка было установлено, что вся находившаяся в садке форель, лишенная воздуха, погибла. Как показывают приведенные примеры, предлагаемый способ зимовки открытопузырных рыб позволяет повысить выживаемость рыб, а также снизить трудовые и материальные затраты. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. СПОСОБ ЗИМОВКИ ОТКРЫТОПУЗЫРНЫХ РЫБ, включающий содержание их в садках в ... 2154939 Способ выращивания кроликов и устройство для его осуществления ... отделение имеет торцевую открывающуюся стенку, которая может быть смонтирована с возможностью открытия или вниз, или вверх, или в сторону. Маточное отделение, гнездо и секция для крольчат имеют технологические дверцы, при этом дверцы маточного отделения и секции для крольчат выполнены в задней части клетки. Под полом клетки размещена наклонно сетка, сверху которой под углом и с зазором к ней для прохождения кала установлен поддон, а под сеткой смонтирован второй поддон, размещенный ниже плоскости первого поддона. При этом маточное отделение для самки имеет входной паз с задвижкой, совмещающийся во время случки с аналогичным пазом с задвижкой клетки для самца, имеющей, по крайней ... 2296457 Устройство для магнитно-импульсной обработки растений ... с первыми входами третьего и четвертого элементов И и входом Т-триггера, первый и второй выходы которого соединены со вторыми входами, соответственно, третьего и четвертого элементов И, а выход блока цифровой индикации через второй элемент задержки соединен с R-входом RS-триггера, при этом намотка первой и второй обмоток катушки второго индуктора выполнена в два провода одного направления. (См. Патент РФ №2231949, 23.10.2002 г., кл. А 01 G 7/04, БИ №19, 2004 г.)Однако данное устройство для магнитно-импульсной обработки растений малоэффективно, так как работает в узком частотном диапазоне, не позволяет проводить обработку растений одно- и разнонаправленными импульсами магнитной ... 2446659 Способ и устройство для органического возделывания зерновых культур ... С другой стороны, представляется возможным достижение ширины полосы высева 10 см (и более), если слегка изменить конструкцию однодисково-анкерного сошника, в частности, увеличив угол между направлением движения посевного агрегата и плоскостью диска или (и) диаметр диска. Известны подобные сошники и с полосой высева 5 6 см. Не исключается установка стреловидных сошников с междурядьем 45 см и сдвинутых на половину междурядья сошников для рядового высева (или узкополосного, или узкорядного). Обращаем внимание на отсутствие сведений по определению нижнего предела ширины полосы высева, при котором имеет место полное или частичное проявление эффекта «густо-пусто» (см., ... |
Еще из этого раздела: 2076603 Способ повышения урожайности сельскохозяйственных культур 2407280 Устройство и способ для осушения воздуха в теплице и теплица 2168887 Машина для добычи корней 2015654 Теплица для подземной выработки 2450505 Порционное устройство для вытирания семян трав 2479996 Экологический комплекс для аквакультуры и рекультивации морских вод 2235450 Малогабаритная машина для обескрыливания, очистки и сортирования лесных семян 2197082 Установка для охлаждения молока с использованием естественного холода 2060659 Установка для переработки органического субстрата в биогумус 2485755 Способ выращивания посадочного материала |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||