Узел извлечения корнеплодов и их транспортировки машины для уборки корнеплодов, машина с таким узлом и способ управления такой машинойПатент на изобретение №: 2456791 Автор: БАЛЛЮ Патрик Жан Мари (FR) Патентообладатель: ЭКСЕЛЬ ЭНДЮСТРИ (FR) Дата публикации: 27 Августа, 2009 Начало действия патента: 18 Февраля, 2008 Адрес для переписки: 191002, Санкт-Петербург, а/я 5, ООО "Ляпунов и партнеры", Е.Г.Ильмер, рег. 1144 Изображения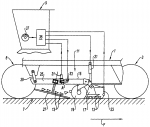 Группа изобретений относится к области сельского хозяйства, а именно к машинам для уборки корнеплодов. Узел машины и их транспортировки машины для уборки корнеплодов содержит извлекающие средства (17, 19) для извлечения корнеплодов, транспортировочные средства (27) для транспортировки корнеплодов и средства (23, 21) для поддержания в реальном времени рабочей глубины извлекающих средств (17, 19) на уровне первой уставки (Е). Транспортировочные средства (27) выполнены подвижными относительно извлекающих средств (17, 19), при этом узел содержит средства для поддержания в реальном времени высоты подъема транспортировочных средств (27) на уровне заданной второй уставки (С), независимо от средств (23, 21) для поддержания в реальном времени рабочей глубины на уровне первой уставки (Е). Изобретение позволяет изменять во времени рабочую глубину извлекающих средств (17, 19) и/или высоту подъема транспортировочных средств (27) без остановки машины для уборки корнеплодов. 3 н. и 15 з.п. ф-лы, 1 ил. Настоящее изобретение относится к машинам для уборки корнеплодов типа свеклы, а в более общем плане - к машинам для извлечения продуктов из почвы. Как хорошо известно из патентных документов FR 2501958, ЕР 0363916 и ЕР 0803178, машина для уборки свеклы содержит, в частности, извлекающий узел, снабженный средствами, обеспечивающими выдергивание плодов свеклы из почвы, а также транспортировочный узел, расположенный по ходу движения машины за извлекающим узлом и обеспечивающий транспортировку плодов свеклы в зону хранения, находящуюся либо в самой машине, либо снаружи от нее (например, в тракторном прицепе). Традиционные машины могут быть оборудованы специальной системой, позволяющей поддерживать на практически постоянном уровне глубину проникновения извлекающих средств в почву, несмотря на наличие в ней различных неровностей. Благодаря такой системе можно гарантировать, что извлекающие средства сохранят свою рабочую глубину при возникновении значительных неровностей, в результате чего удастся предотвратить как опасность некачественного извлечения плодов свеклы, так и их слишком глубокое проникновение в почву, которое чревато захватом чрезмерно большого объема земли, и/или воздействие на них значительных усилий, способных вызвать механическую деформацию некоторых узлов машины. В такой известной системе, где предусмотрена механическая связь между извлекающими и транспортировочными средствами, любое изменение рабочей глубины извлекающих средств влечет за собой и одновременное изменение подъема транспортировочных средств. Таким образом, уменьшение рабочей глубины извлекающих средств неизбежно приводит к одновременному подъему транспортировочных средств, при этом возникает опасность выпадения плодов свеклы из их нижней части. И наоборот, при увеличении рабочей глубины извлекающих средств неизбежно происходит одновременное опускание транспортировочных средств, следствием чего является захват слишком большого объема земли. Для устранения указанных недостатков необходимо предусмотреть полную остановку машины и выполнение трудоемких операций разборки и последующей повторной сборки с целью изменения относительных уровней подъема извлекающих и транспортировочных средств. Цель изобретения как раз и состоит в разработке средств, которые позволили бы устранить эти недостатки. Указанная цель достигается с помощью узла машины для уборки корнеплодов, содержащего: извлекающие средства для извлечения корнеплодов, транспортировочные средства для транспортировки корнеплодов и средства для поддержания в реальном времени рабочей глубины извлекающих средств на уровне первой уставки (Е), причем указанный узел отличается тем, что указанные транспортировочные средства выполнены подвижными относительно указанных извлекающих средств и тем, что он содержит средства для поддержания в реальном времени подъема указанных транспортировочных средств на уровне заданной второй уставки (С). Благодаря таким признакам извлекающие средства оказываются в некотором роде независимыми от транспортировочных средств - действительно, выбор уставки Е рабочей глубины извлекающих средств никак не влияет на высоту подъема транспортировочных средств, которая задана уставкой С, и наоборот. В результате удается изменять в реальном времени, без необходимости останавливать при этом машину, во-первых, рабочую глубину Е извлекающих средств, и/или, во-вторых, высоту С подъема транспортировочных средств, причем независимо друг от друга. В соответствии с другими возможными признаками узла согласно изобретению указанные средства для поддержания в реальном времени рабочей глубины указанных извлекающих средств являются автоматическими; указанные средства для поддержания в реальном времени высоты подъема указанных транспортировочных средств являются автоматическими; указанный узел содержит первую опорную конструкцию, несущую указанные извлекающие средства, вторую опорную конструкцию, несущую указанные транспортировочные средства, по меньшей мере один первый исполнительный орган, обеспечивающий изменение высоты подъема указанной первой опорной конструкции, по меньшей мере один второй исполнительный орган, обеспечивающий изменение положения указанной второй опорной конструкции относительно указанной первой опорной конструкции, по меньшей мере один первый датчик, обеспечивающий генерацию сигнала, характеризующего конфигурацию почвы, по меньшей мере один второй датчик, обеспечивающий генерацию сигнала, характеризующего положение указанной второй опорной конструкции относительно указанной первой опорной конструкции, по меньшей мере один орган фиксации уставки и по меньшей мере одно надлежащим образом запрограммированное вычислительное устройство, обеспечивающее обработку информации, поступающей от указанных первого и второго датчиков и от указанных средств задания уставки, и соответствующее управление указанными первым и вторым исполнительными органами, указанная вторая опорная конструкция установлена с возможностью поворота относительно указанной первой опорной конструкции, при этом указанный второй датчик обеспечивает генерацию сигнала, характеризующего угол поворота указанной второй опорной конструкции относительно указанной первой опорной конструкции, в результате чего достигается исключительно простое техническое решение проблемы шарнирного соединения друг с другом этих двух опорных конструкций; указанная вторая опорная конструкция установлена с возможностью поступательного перемещения относительно указанной первой опорной конструкции, при этом указанный второй датчик обеспечивает генерацию сигнала, характеризующего линейное перемещение указанной второй опорной конструкции относительно указанной первой опорной конструкции; указанные исполнительные органы выбраны из группы, включающей гидравлические, пневматические, электрические, электромагнитные и кремальерные (с зубчатыми рейками) исполнительные органы, причем на рынке имеются самые разнообразные модели таких органов; указанные извлекающие средства представляют собой извлекающие органы, выбранные из группы, включающей дисковые сошники, вибролемеха, неподвижные лемеха, колеса, а указанные транспортировочные средства выбраны из группы, включающей валики, турбины, ленточные конвейеры, так что, как можно видеть, подобные извлекающие и транспортировочные средства являются вполне обычными, традиционно используемыми в технологии уборки свеклы; указанный узел содержит средства для разного воздействия с правой и левой стороны на регулировки глубины указанных извлекающих средств и высоты подъема указанных транспортировочных средств. Изобретение охватывает также машину для уборки корнеплодов, имеющую раму, смонтированную на ряде колес, которая отличается тем, что она содержит узел типа описанного выше, соединенный с указанной рамой. В соответствии с одним из факультативных признаков рассматриваемой машины указанный узел соединен с указанной рамой в двух передних точках и в одной задней точке, причем указанные две передние точки представляют собой два исполнительных органа, а указанная задняя точка представляет собой механический шарнир, так что можно видеть, что здесь применена классическая для свеклоуборочных машин трехточечная подвеска, обеспечивающая фиксацию предлагаемого узла на существующих машинах без каких-либо особых дополнительных мер для ее адаптации. Предметом изобретения является также способ управления узлом типа описанного выше, отличающийся тем, что регулируют в реальном времени относительные положения указанных извлекающих средств и указанных транспортировочных средств таким образом, чтобы высота подъема указанных транспортировочных средств оставалась, по существу, постоянной относительно почвы, на уровне их собственной уставки (С), а рабочая глубина указанных извлекающих средств оставалась на уровне их собственной уставки (Е). В соответствии с другими факультативными признаками этого способа: - регулируют высоту подъема указанных транспортировочных средств и глубину указанных извлекающих средств автоматическим образом; - вручную поддерживают высоту подъема указанных транспортировочных средств на уровне их собственной уставки (С) и автоматически поддерживают рабочую глубину указанных извлекающих средств на уровне их собственной уставки (Е); - автоматически поддерживают высоту подъема указанных транспортировочных средств на уровне их собственной уставки (С) и вручную поддерживают рабочую глубину указанных извлекающих средств на уровне их собственной уставки (Е); - автоматически поддерживают высоту подъема указанных транспортировочных средств и глубину указанных извлекающих средств на уровне их соответствующих собственных уставок (С, Е), что позволяет освободить оператора от необходимости выполнять какие бы то ни было действия; - когда указанный узел проходит по выпуклости, вначале приподнимают указанные извлекающие средства, затем опускают указанные транспортировочные средства относительно указанных извлекающих средств с соответствующей задержкой времени, определяемой скоростью перемещения указанного узла, его геометрией и его инерцией, после чего, также используя соответствующую задержку времени, опускают указанные извлекающие средства, затем приподнимают указанные транспортировочные средства относительно указанных извлекающих средств и, наконец, опускают указанные транспортировочные средства с возвращением их начальной конфигурации после того, как выпуклость пройдена за этими средствами; - когда указанный узел проходит по впадине, вначале опускают указанные извлекающие средства, затем приподнимают указанные транспортировочные средства относительно указанных извлекающих средств с соответствующей задержкой времени, определяемой скоростью перемещения указанного узла, его геометрией и его инерцией, после чего, также используя соответствующую задержку времени, приподнимают указанные извлекающие средства, затем опускают указанные транспортировочные средства относительно указанных извлекающих средств и, наконец, приподнимают указанные транспортировочные средства с возвращением их начальной конфигурации после того, как впадина пройдена за этими средствами; - воздействуют различным образом с правой и левой стороны на регулировки глубины указанных извлекающих средств и высоты подъема указанных транспортировочных средств с целью поддержания этих извлекающих и транспортировочных средств параллельными почве. Остальные признаки и преимущества изобретения явствуют из рассмотрения приводимого ниже описания в сочетании с чертежом, на котором схематически представлена машина согласно этому изобретению. На этом чертеже можно видеть машину для уборки свеклы, имеющую несущую балку 1, которая установлена на двух передних осях 3 и одной задней оси 5, обеспечивающих качение машины по почве 7. Эта машина снабжена также кабиной 9, в которой находится водитель (не показан). Обычное направление передвижения свеклоуборочной машины показано на чертеже стрелкой F, а понятия «вправо» и «влево» следует понимать как «поперек» относительно этого направления. Указанная свеклоуборочная машина имеет подвешенный к несущей балке 1 узел 11, обеспечивающий, с одной стороны, извлечение плодов 13 свеклы из почвы 7, а с другой стороны - транспортировку этих плодов в зону хранения (не показана), находящуюся либо внутри машины, либо снаружи от нее (например, на следующем за машиной грузовике). В части машины, которая является передней по направлению ее перемещения, узел 11 снабжен первой опорной конструкцией 15, на которой установлены средства для извлечения плодов 13 свеклы. В показанном здесь примере эти извлекающие средства содержат пары традиционных неподвижных лемехов 17 и/или вращающихся дисков 19, обеспечивающих эффективное извлечение плодов 13 свеклы из почвы 7. В обычных условиях насчитывается до полудюжины таких пар лемехов/дисков, которые распределены, по существу, вдоль поперечного направления. Разумеется, изобретение ни в коем случае не ограничивается использованием подобных извлекающих средств, так что можно с таким же успехом предусмотреть вибролемеха, неподвижные лемеха, колеса и другие устройства, широко известные специалистам. Первая опорная конструкция 15 соединена с несущей балкой 1 с помощью ряда (как правило, двух) силовых цилиндров 21 (на чертеже из них виден только один), которые помещены справа и слева от оси перемещения машины и могут быть гидравлическими, пневматическими, электрическими, электромагнитными или кремальерными. Спереди от первой опорной конструкции 15 закреплены датчики 23 известного типа, которые обеспечивают определение высоты подъема первой опорной конструкции 15 относительно почвы 7. Как правило, помещают по одному датчику 23 на каждом конце (в направлении поперек перемещения) опорной конструкции 15, то есть один справа и один слева. В качестве таких датчиков, которые имеются в свободной продаже, можно использовать, например, механические щупы или датчики ультразвукового типа. Сзади от первой опорной конструкции 15 находится вторая опорная конструкция 25, на которой смонтированы средства 27 для транспортировки плодов 13 свеклы. Эти транспортировочные средства могут, как правило, представлять собой вращающиеся решетки (как в случае, показанном на чертеже), которые известны также под названием «турбин», валики или ленточные конвейеры, которые хорошо известны специалистам. Указанные транспортировочные средства сообщаются со средствами хранения (не показаны) плодов свеклы типа бункеров, которые могут находиться либо внутри машины, либо снаружи от нее, например в прицепе, буксируемом движущимся за машиной трактором. Вторая опорная конструкция 25 пассивно подвешена к несущей балке 1 с помощью тяги 29 или же простого либо шарового шарнира, хорошо известных специалистам. Вторая опорная конструкция 25 смонтирована шарнирно соединенной, а точнее, как видно в данном примере, поворотной относительно первой опорной конструкции 15 вокруг оси А, поперечной по отношению к направлению перемещения машины. Между первой 15 и второй 25 опорными конструкциями помещен по меньшей мере один исполнительный орган 31 гидравлического, пневматического, электрического, электромагнитного или кремальерного типа с возможностью воздействия на наклон этих двух опор относительно друг друга. Предусмотрен также, по меньшей мере, один датчик, обеспечивающий определение угла наклона второй опорной конструкции 25 относительно первой опорной конструкции 15. Перейдем к детальному рассмотрению электронной системы управления, взаимодействующей с описанными выше механическими органами. В состав этой электронной системы управления входят вычислительное устройство 35, соединенное с помощью соответствующих электрических схем, в частности, с силовым цилиндром 21, датчиком 23 высоты подъема, силовым цилиндром 31, датчиком 33 угла, а также с кнопкой 37 фиксации уставки Е рабочей глубины, которая находится в кабине 9. Если говорить более конкретно, вычислительное устройство 35 имеет возможность воздействия на силовые цилиндры 21 и 31 в соответствии, во-первых, с сигналами, поступающими с датчиков 23, 33, и во-вторых, с уставкой 37. Если выразиться еще точнее, вычислительное устройство 35 программируется таким образом, чтобы можно было обеспечить выполнение перечисляемых ниже действий. Оператор, находящийся в кабине 9, пользуясь кнопкой 37, задает уставку Е рабочей глубины. Исходя из этой уставки, вычислительное устройство 35 регулирует высоту подъема силовых цилиндров 21 таким образом, чтобы лемеха 17 и диски 19 проникали в почву 7 на нужную глубину. При этом вычислительное устройство 35 регулирует силовой цилиндр 31 таким образом, чтобы высота подъема транспортировочных средств 27 относительно почвы не менялась, то есть оставалась на уровне уставки С. Выполнение рассмотренной выше операции регулировки оказывается возможным благодаря датчику 33, который выдает в вычислительное устройство 35 данные об относительных положениях первой опорной конструкции 15 и второй опорной конструкции 25. Для этого в память вычислительного устройства 35 введена таблица значений, с помощью которой оно может определить, исходя из информации, поступившей от датчика 23 высоты подъема, до какого положения датчика 33 надо дойти путем удлинения или укорочения штоков силовых цилиндров 31, чтобы обеспечить поддержание постоянной высоты подъема транспортировочных средств 27 относительно почвы в соответствии с заданной уставкой С. Когда датчики 23 высоты подъема обнаруживают изменения рельефа почвы 7, вычислительное устройство 35 обрабатывает поступающие от них сигналы и производит регулировку силовых цилиндров 21 и 41, чтобы, во-первых, оставалась практически постоянной высота подъема транспортировочных средств 27 относительно почвы 7 (уставка С), и, во-вторых, оставалась практически постоянной рабочая глубина лемехов 17 и/или дисков 19 в почве 7 (уставка Е). В результате, с одной стороны, плоды 13 свеклы могут почти всегда доходить до нужной высоты подъема с помощью лемехов 17 и дисков 19, благодаря чему их удается надежно захватывать и без повреждения извлекать из почвы 7, а с другой стороны, нет опасности слишком глубокого проникновения транспортировочных средств 27 в почву с захватом, соответственно чрезмерного объема земли и, наоборот, опасности того, что они будут находиться слишком высоко, так что плоды свеклы будут сваливаться вниз. Если говорить точнее, когда датчики 23 обнаруживают резкий подъем уровня почвы 7, а именно наличие выпуклости, вычислительное устройство 35 последовательно выдает, при необходимости с временной задержкой, которая согласована, во-первых, со скоростью перемещения машины и, во-вторых, с относительным расположением датчиков 23, извлекающих средств 17, 19 и транспортировочных средств 27, следующие команды: на укорочение штоков силовых цилиндров 21, благодаря чему приподнимается первая опорная конструкция 15 и, следовательно, лемеха 17 и диски 19, и воздействие на силовой цилиндр 31 с целью поворота второй опорной конструкции 25 относительно первой опорной конструкции 15 в таком направлении, чтобы обеспечивалось движение вниз этой второй опорной конструкции 25 с предотвращением при этом подъема транспортировочных средств относительно почвы (поддержание уставки С), затем: на удлинение штоков силовых цилиндров 21, благодаря чему опускается первая опорная конструкция 15 и, следовательно, лемеха 17 и диски 19, так что они возвращаются в начальное положение и остаются на уровне уставки глубины Е, и воздействие на силовой цилиндр 31 с целью поворота второй опорной конструкции 25 относительно первой опорной конструкции 15 в таком направлении, чтобы обеспечивалось движение вверх этой второй опорной конструкции 25 с поддержанием при этом уставки высоты С подъема транспортировочных средств и предотвращением их опускания относительно почвы, и, наконец: на удлинение штоков силовых цилиндров 31, с тем чтобы повернуть вторую опорную конструкцию 25 относительно первой опорной конструкции 15 в таком направлении, чтобы обеспечивалось движение вниз этой второй опорной конструкции 25, вследствие чего указанные транспортировочные средства опускаются, возвращаясь в исходное положение, и остаются на высоте подъема относительно почвы, соответствующей уставке С. Когда датчики 23 обнаруживают резкий провал в почве 7, имеет место последовательное выполнение описанных выше операций в обратном порядке, то есть штоки силовых цилиндров 21 начинают удлиняться, а силовой цилиндр 31 регулируется таким образом, чтобы приподнять транспортировочные средства 27, затем штоки силовых цилиндров 21 укорачиваются, а штоки силовых цилиндров 31 удлиняются, вследствие чего транспортировочные средства 27 опускаются, и, наконец, штоки силовых цилиндров 31 укорачиваются, приподнимая транспортировочные средства и возвращая их в исходное положение с поддержанием их высоты подъема на уровне уставки С. Следует отметить, что описанную выше работу машины можно сделать более эффективной, предусмотрев по два силовых цилиндра 21 и два датчика 23 соответственно с правой и левой стороны, - если справа и слева от машины имеют место разные изменения рельефа почвы, то можно будет оказывать разное воздействие на силовые цилиндры 21, а также на цилиндры 31, если они тоже предусмотрены с обеих сторон машины. В результате поддержание высоты подъема транспортировочных средств относительно почвы и рабочей глубины извлекающих средств можно обеспечить с необходимой равномерностью по всей ширине машины. Как можно понять из приведенного выше описания, благодаря изобретению в нашем распоряжении оказываются средства, обеспечивающие возможность поддержания в реальном времени, то есть по мере перемещения машины по почве 7, а также одновременно, во-первых, высоты подъема транспортировочных средств относительно почвы (уставка С) и, во-вторых, рабочей глубины извлекающих средств (уставка Е). Такая регулировка в реальном времени может осуществляться либо после обнаружения датчиками 23 нарушения ровности рельефа почвы 7, либо после того, как водитель изменил уставку Е рабочей глубины извлекающих средств, заданную с помощью кнопки 37. Оператор может в любой момент предпринять изменение уставки Е глубины извлекающих средств без изменения при этом уставки С высоты подъема транспортировочных средств и наоборот благодаря вычислительному устройству 35, которое автоматически окажет воздействие на силовые цилиндры 21 и 31, с тем чтобы были соблюдены новые независимые уставки Е и С. Должно быть совершенно очевидно, что изобретение ни в коем случае не ограничивается описанным выше вариантом осуществления, который был рассмотрен лишь в качестве примера. Так, например, в случае, когда датчики 23 высоты подъема обнаруживают выпуклость или выемку, можно немедленно привести в действие силовые цилиндры 21 в таком направлении, чтобы обеспечить поддержание уставки Е, но при этом будет совершенно излишним приводить в действие силовые цилиндры 31, сначала в одном, а затем в другом направлении, как говорилось выше, поскольку создаваемые при этом смещения по высоте подъема транспортировочных средств будут слишком кратковременными и незначительными, если учесть незначительное расстояние между датчиками 23 и транспортировочными средствами 27. Однако при таком упрощении работы вычислительное устройство 35 будет, конечно, продолжать поддерживать на постоянном уровне высоту подъема транспортировочных средств (уставка С) вне зависимости от любых изменений в реальном времени рабочей глубины извлекающих средств (уставка С, задаваемая кнопкой 37) и, наоборот, поддерживать на постоянном уровне рабочую глубину извлекающих средств вне зависимости от любых изменений в реальном времени высоты подъема транспортировочных средств, в результате чего автоматически будет непрерывно сохраняться соблюдение вычислительным устройством 35 указанных уставок Е и С, как это было разъяснено выше. Кроме того, можно принять меры к тому, чтобы вторая опорная конструкция 25 была смонтирована с возможностью поступательного перемещения относительно первой опорной конструкции 15, и в этом случае датчик, помещенный между этими двумя конструкциями, сможет выдавать сигнал, характеризующий линейное перемещение указанной второй конструкции относительно указанной первой конструкции. Можно также выполнить такую конструкцию, в которой эти две опорные конструкции не будут иметь прямой механической связи друг с другом. Формула изобретения1. Узел извлечения корнеплодов и их транспортировки машины для уборки корнеплодов, содержащий извлекающие средства (17, 19) для извлечения корнеплодов, транспортировочные средства (27) для транспортировки корнеплодов и средства (23, 21) для поддержания в реальном времени рабочей глубины извлекающих средств (17, 19) на уровне первой уставки (Е), отличающийся тем, что транспортировочные средства (27) выполнены подвижными относительно извлекающих средств (17, 19), при этом узел содержит средства для поддержания в реальном времени высоты подъема транспортировочных средств (27) на уровне заданной второй уставки (С), независимо от средств (23, 21) для поддержания в реальном времени рабочей глубины на уровне первой уставки (Е). 2. Узел по п.1, отличающийся тем, что указанные средства для поддержания в реальном времени рабочей глубины (Е) указанных извлекающих средств (17, 19) являются автоматическими. 3. Узел по любому из пп. 1 или 2, отличающийся тем, что указанные средства для поддержания в реальном времени высоты подъема (С) указанных транспортировочных средств (27) являются автоматическими. 4. Узел по п.2, отличающийся тем, что он содержит первую опорную конструкцию (15), несущую указанные извлекающие средства (17, 19), вторую опорную конструкцию (25), несущую указанные транспортировочные средства (27), по меньшей мере, один первый исполнительный орган (21), обеспечивающий изменение высоты подъема указанной первой опорной конструкции (25), по меньшей мере, один второй исполнительный орган (31), обеспечивающий изменение положения указанной второй опорной конструкции (25) относительно указанной первой опорной конструкции (15), по меньшей мере, один первый датчик (23), обеспечивающий генерацию сигнала, характеризующего конфигурацию почвы (7), по меньшей мере, второй датчик (33), обеспечивающий генерацию сигнала, характеризующего положение указанной второй опорной конструкции (25) относительно указанной первой опорной конструкции (15), по меньшей мере, один орган задания уставки (37) и, по меньшей мере, одно надлежащим образом запрограммированное вычислительное устройство (35), обеспечивающее обработку информации, поступающей от указанных первого датчика (23) и второго датчика (33) и от указанных средств (37) задания уставки, и обеспечивающее управление указанными первым исполнительным органом (21) и вторым исполнительным органом (31). 5. Узел по п.4, отличающийся тем, что указанная вторая опорная конструкция (25) установлена с возможностью поворота относительно указанной первой опорной конструкции (15), при этом указанный второй датчик (33) обеспечивает генерацию сигнала, характеризующего угол поворота указанной второй опорной конструкции (25) относительно указанной первой опорной конструкции (15). 6. Узел по п.4, отличающийся тем, что указанная вторая конструкция (25) установлена с возможностью поступательного перемещения относительно указанной первой конструкции (15), при этом указанный второй датчик (33) обеспечивает генерацию сигнала, характеризующего линейное перемещение указанной второй конструкции (25) относительно указанной первой конструкции (15). 7. Узел по любому из пп.4-6, отличающийся тем, что указанные исполнительные органы (21, 31) выбраны из группы, включающей гидравлические, пневматические, электрические, электромагнитные и кремальерные исполнительные органы. 8. Узел по любому из пп.1, 2, 4, 5 и 6, отличающийся тем, что указанные извлекающие средства (17, 19) представляют собой извлекающие органы, выбранные из группы, включающей диски (19) с сошниками (17), вибролемеха, неподвижные лемеха, колеса, а указанные транспортировочные средства (27) выбраны из группы, включающей валики, турбины (27), ленточные конвейеры. 9. Узел по любому из пп.1, 2, 4, 5 и 6, отличающийся тем, что содержит средства для разного воздействия с правой и левой стороны на средства регулировки глубины указанных извлекающих средств (17, 19) и высоты подъема указанных транспортировочных средств (27). 10. Машина для уборки корнеплодов, имеющая раму (1), установленную на ряде колес (3, 5), отличающаяся тем, что она содержит узел по любому из пп.1-9, соединенный с указанной рамой (1). 11. Машина по п.10, отличающаяся тем, что указанный узел соединен с указанной рамой (1) в двух передних точках (21) и в одной задней точке (29), причем указанные две передние точки представляют собой два исполнительных органа, а указанная задняя точка представляет собой пассивный механический шарнир. 12. Способ управления узлом извлечения корнеплодов и их транспортировки машины для уборки корнеплодов, в котором указанный узел содержит извлекающие средства (17, 19) для извлечения корнеплодов и транспортировочные средства (27) для транспортировки корнеплодов, характеризующийся тем, что регулируют в реальном времени относительные положения указанных извлекающих средств (17, 19) и указанных транспортировочных средств (27) таким образом, чтобы высота подъема указанных транспортировочных средств (27) оставалась, по существу, постоянной относительно почвы (7), на уровне ее собственной уставки (С), а рабочая глубина указанных извлекающих средств (17, 19) оставалась на уровне ее собственной уставки (Е), не зависящей от уставки (С) высоты подъема указанных транспортировочных средств (27). 13. Способ по п.12, в котором вручную поддерживают высоту подъема указанных транспортировочных средств (27) на уровне ее собственной уставки (С) и автоматически поддерживают рабочую глубину извлекающих средств (17, 19) на уровне ее собственной уставки (Е). 14. Способ по п.12, в котором автоматически поддерживают высоту подъема указанных транспортировочных средств (27) на уровне ее собственной уставки (С) и вручную поддерживают рабочую глубину указанных извлекающих средств (17, 19) на уровне ее собственной уставки (Е). 15. Способ по п.12, в котором автоматически поддерживают высоту подъема указанных транспортировочных средств (27) и глубину указанных извлекающих средств (17, 19) на уровне их соответствующих собственных уставок (С, Е). 16. Способ по любому из пп.12-15, в котором при проходе по выпуклости почвы (7) в указанном узле вначале приподнимают извлекающие средства (17, 19), затем опускают транспортировочные средства (27) относительно указанных извлекающих средств (17, 19) с соответствующей задержкой по времени, определяемой скоростью перемещения указанного узла, его геометрией и его инерцией, после чего, используя соответствующую задержку по времени, опускают извлекающие средства (17, 19), затем приподнимают транспортировочные средства (27) относительно извлекающих средств (17, 19) и затем опускают транспортировочные средства (27) с возвращением их начальной конфигурации после прохождения выпуклости почвы. 17. Способ по любому из пп.12-15, в котором при проходе по впадине почвы в указанном узле вначале опускают извлекающие средства (17, 19), затем приподнимают транспортировочные средства (27) относительно извлекающих средств (17, 19) с соответствующей задержкой по времени, определяемой скоростью перемещения указанного узла, его геометрией и его инерцией, после чего, также используя соответствующую задержку по времени, приподнимают извлекающие средства (17, 19), затем опускают транспортировочные средства (27) относительно извлекающих средств (17, 19) и после чего приподнимают транспортировочные средства (27) с возвращением их начальной конфигурации после прохождения впадины почвы. 18. Способ по любому из пп.12-15, в котором осуществляют воздействие на средства регулировки глубины извлекающих средств (17, 19) с правой и левой стороны и высоты подъема транспортировочных средств (27) для поддержания указанных извлекающих средств (17, 19) и транспортировочных средств (27) параллельными почве. Популярные патенты: 2015633 Способ переработки отходов животноводческих комплексов и устройство для его осуществления ... камеры за счет привода 21, который может быть выполнен, например, в виде двигателя с редуктором. Вакуумная камера 19 ограничена цилиндрической обечайкой 22, часть боковой поверхности которой контактирует с всасывающим патрубком 23 инжекционного вакуумного насоса 24, приводимого в действие шестеренчатым насосом 25 с приводом 26. Насос 24 обеспечивает создание необходимого разрежения в вакуумной камере 19 за счет создания водяной струи в полости, соединенной с вакуумной камерой, за счет увлечения водяных паров посредством отсоса и посредством поглощения этих паров самой струей, что обеспечивает высокую эффективность вакуумирования. Шестеренчатый насос 25 с приводом 26 обеспечивает ... 2195801 Картофелекопатель швыряльного типа ... клубненосной массы гребенками 15 в сторону, обратную, направлению движения картофелекопателя. Вал 25 ротора смонтирован на подшипниках, корпуса которых присоединены к панелям /не показано/ боковин 5. Сверху ротор закрыт защитным кожухом 18, который выполнен в виде части полого цилиндра. При этом со стороны лезвий между лемехами 13 и образующей кожуха 18 предусмотрено окно /не показано/ для пропуска клубненосной массы к ротору. С противоположной стороны кожух 18 соединен с крышкой 22 канала. Боковые части указанного кожуха снабжены крышками, прилегающими к боковинам 5. Канал имеет в поперечном сечении П-образную форму и выполнен с уменьшающимся живым сечением по ширине в ... 2477044 Искусственная рыболовная приманка (варианты) ... имеющий головную и хвостовую части, и как минимум один крючок, расположенный полностью или частично в корпусе. В отличие от прототипа корпус выполнен в виде виброхвоста или риппера, а в корпусе расположен гибкий элемент, закрепленный на цевье крючка с возможностью освобождения из корпуса через выполненный в нем продольный разрез, причем гибкий элемент представляет собой цепочку, или поводок, или пластинку с отверстиями, окантованными металлом или твердым пластиком, комбинированную с цепочкой и/или поводком, а в хвостовой части корпуса расположен ограничитель растяжения корпуса приманки, закрепленный на гибком элементе. Согласно изобретению по второму варианту ограничитель растяжения ... 2040900 Фунгицидное средство ... Такое (агро) химическое средство или средства служат составной частью предложенного изобретения. Последующие примеры служат для пояснения изобретения, причем "Активное вещество" означает смесь "фенпиклонила" I и соединения II в определенном отношении в смеси от 10:1 до 1:10. Данные приведены в табл.1. Активное вещество тщательно перемешивают и хорошо перемалывают в подходящей мельнице. Получают порошок для опрыскивания, допускающий разбавление водой до суспензии любой желаемой концентрации. Эмульсионный концентрат. Активное вещество (1:11 1:20) 10% Гликолевый простой эфир октилфенол полиэтилена (4-5 молей окиси этилена) 3% Додецилбензолсульфонат кальция 3% Полигликолевый эфир ... 2218756 Способ изготовления антипаразитарного ошейника ... 855oС, формующая головка - 855oС при оборотах шнека не более 50 об/мин. Изобретение позволяет обеспечить равномерное распределение инсектицида - диазинона - по объему и поверхности ленты, снижение температуры переработки, коррозии оборудования и выделения токсичных веществ, создание более мягкой эластичной ленты, не вызывающей раздражение кожи животных, увеличение срока годности ошейника. Изобретение относится к ветеринарии, в частности к способу изготовления антипаразитарного ошейника. Известен способ изготовления антипаразитарного ошейника против наружных паразитов из композиции на основе поливинилхлорида (полихлорвинила) соединение - С - 83,246%, диазинона стабилизированного - ... |
Еще из этого раздела: 2403708 Устройство для полива сельхозрастений 2189736 Способ отбора гибридов кукурузы, устойчивых к засухе и стеблевым гнилям 2140738 Производные n-арилгидразина, способ их получения, способ подавления насекомых и композиция для подавления насекомых 2437864 Способ микробиологической переработки птичьего помета 2075926 Устройство для группового учета молока на доильных установках 2182765 Имитатор звуков рыб 2053661 Устройство для сколачивания ульевых рамок 2201244 Препарат для защиты животных и растений 2415552 Питатель молотилки зерноуборочного комбайна 2434381 Технологическая линия для приготовления и раздачи влажных кормов |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||