Устройство для управления глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителемПатент на изобретение №: 2418399 Автор: Калиниченко Валерий Петрович (RU), Шаршак Владимир Константинович (RU), Илларионов Виктор Васильевич (RU), Ладан Евгений Пантелеймонович (RU), Генев Евгений Дмитриевич (RU), Черненко Владимир Владимирович (RU), Зинченко Владимир Евгеньевич (RU), Ларин Сергей Викторович (RU), Ларина Юлия Валерьевна (RU), Мищенко Николай Анатольевич (RU), Суковатов Владимир Александрович (RU), Иваненко Анна Александровна (RU) Патентообладатель: Федеральное государственное образовательное учреждение высшего профессионального образования "Донской государственный аграрный университет" (ФГОУ ВПО ДГАУ) (RU), Учреждение "Институт плодородия почв юга России" (ИППЮР) (RU) Дата публикации: 27 Сентября, 2010 Начало действия патента: 24 Марта, 2009 Адрес для переписки: 346493, Ростовская обл., Октябрьский р-н, п. Персиановский, Донской государственный аграрный университет Изображения 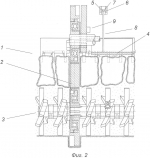 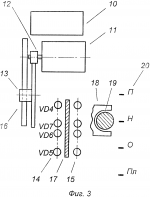 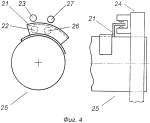 Устройство имеет датчик вертикального положения рабочего органа фронтального ротационного внутрипочвенного рыхлителя относительно поверхности почвы. Датчик выполнен в виде опорной лыжи, смонтированной на раме рыхлителя с возможностью упругой деформации при вертикальной нагрузке 0,1 веса фронтального ротационного внутрипочвенного рыхлителя. Устройство содержит также информационно-логический исполнительный блок постоянной глубины обработки почвы и логическую электронную систему управления исполнительным блоком постоянной глубины обработки почвы. Такое конструктивное выполнение позволит управлять глубиной обработки почвы при движении рыхлителя с высокой стабильностью, качеством, надежностью и меньшими энергозатратами. 6 з.п. ф-лы, 5 ил. Изобретение относится к сельскохозяйственному машиностроению и предназначено для управления глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем. Известен косвенный способ управления глубиной механической обработки почвы путем гидравлического увеличения сцепного веса трактора (Трактор / ред. М.А.Орлов. М.: Просвещение, 1980. 272 с. С.153 - аналог). Недостатком способа является отсутствие прямого регулирования глубины обработки почвы почвообрабатывающей машиной. Наиболее близким по технической сущности к заявляемому объекту является устройство для управления глубиной обработки почвы фрезерным рыхлителем, имеющее датчик глубины обработки почвы, выход которого соединен со входом блока управления, и механизм управления навеской трактора, электрический вход которого соединен с выходом блока управления (RU В данном устройстве имеются следующие недостатки: - регулирующий элемент глубины обработки почвы в виде опорных колес расположен на раме устройства, что увеличивает габариты и массу устройства; - дополнительные элементы конструкции в виде колеса и узла его присоединения к раме оказывают тяговое сопротивление обработке почвы; - вся масса устройства в рабочем положении целиком находится на его опорных колесах, что приводит к дополнительной пробуксовке задних колес трактора; - зона контакта опорного колеса с почвой в направлении обработки ограничена ввиду цилиндрической формы опорного колеса, поэтому не обеспечивается интегрированное копирование поверхности обрабатываемого поля, возникает дополнительное тяговое сопротивление обработке почвы при преодолении колесом неровностей почвы, имеет место неравномерность глубины обработки почвы; - отсутствует электронная система защиты, что ухудшает качество обработки почвы и снижает надежность почвообрабатывающей машины. Технической задачей, для решения которой служит предлагаемое изобретение, является создание условий, при которых обеспечивается устойчивое управление глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем, уменьшается масса системы регулирования, снижается тяговое сопротивление обработке почвы фронтальным ротационным внутрипочвенным рыхлителем, улучшается интегрированное копирование поверхности обрабатываемого поля, снижается неравномерность глубины обработки почвы, улучшается качество обработки почвы, повышается надежность почвообрабатывающей машины. Техническим результатом, получаемым при практическом использовании изобретения, является создание возможности при движении агрегата управлять глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем с высокой стабильностью, качеством, надежностью и меньшими энергозатратами. Для решения поставленной технической задачи устройство для управления глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем снабжено датчиком вертикального положения рабочего органа фронтального ротационного внутрипочвенного рыхлителя относительно поверхности почвы в виде опорной лыжи, выполненной на раме рыхлителя с возможностью упругой деформации при вертикальной нагрузке 0,1 веса фронтального ротационного внутрипочвенного рыхлителя, информационно-логическим исполнительным блоком постоянной глубины обработки почвы, логической электронной системой управления исполнительного блока постоянной глубины обработки почвы; механической оптической шторкой, которая выполнена на верхней поверхности опорной лыжи и оптически связана с двойной оптоэлектронной парой, которая установлена на раме фронтального ротационного внутрипочвенного рыхлителя; информационно-логическим исполнительным блоком постоянной глубины обработки почвы, который содержит исполнительный сервопривод с вилкой привода рычага гидравлического распределителя штатной навесной гидравлической системы трактора; электронно-механическим датчиком предельного замедления рабочего органа фронтального ротационного внутрипочвенного рыхлителя, установленным на раме фронтального ротационного внутрипочвенного рыхлителя; датчиком угла наклона вала отбора мощности трактора -25° относительно продольной оси трактора в виде оптико-механического электронного датчика положения, состоящего из оптико-механической шторки, установленной на верхнем вале навесной системы трактора, и оптоэлектронной открытой инфракрасной пары, установленной на кронштейне навесной системы трактора; датчиком угла наклона вала отбора мощности трактора +15° относительно продольной оси трактора в виде оптико-механического электронного датчика положения, состоящего из оптико-механической шторки, установленной на кронштейне навесной системы трактора, и оптоэлектронной открытой инфракрасной пары, установленной на верхнем вале навесной системы трактора; логической электронной системы управления исполнительного блока постоянной глубины обработки почвы фронтальным ротационным внутрипочвенным рыхлителем, согласно состоянию элементов управления по электронно-логическим сигналам датчика положения рабочего органа фронтального ротационного внутрипочвенного рыхлителя относительно поверхности почвы, электронно-механического датчика предельного замедления рабочего органа фронтального ротационного внутрипочвенного рыхлителя, датчика угла наклона вала отбора мощности трактора -25° относительно продольной оси трактора, датчика угла наклона вала отбора мощности трактора +15° относительно продольной оси трактора вырабатывают соответствующие заданной глубине обработки почвы фронтальным ротационным внутрипочвенным рыхлителем сигналы, по которым задают направление и длительность вращения серводвигателя привода механической вилки привода рычага гидравлического распределителя штатной навесной системы трактора, запрещают опускание навески трактора, отключают трансмиссию и вал отбора мощности трактора. Изобретение поясняется прилагаемыми схемами, где: на фиг.1 показано предлагаемое устройство, вид сбоку; на фиг.2 - предлагаемое устройство, вид сзади; на фиг.3 - информационно-логический исполнительный блок постоянной глубины обработки почвы фронтальным ротационным внутрипочвенным рыхлителем; на фиг.4 - датчики положения навесной системы трактора; на фиг.5 - принципиальная электрическая схема информационно-логической электронной системы управления. Устройство по фиг.1, фиг.2 состоит из почвообрабатывающей машины с рыхлящим рабочим органом, например, фронтального ротационного внутрипочвенного рыхлителя 1 со щелерезами привода 2, валом фрезерователя 3, механического датчика положения рыхлителя относительно почвы в виде опорной лыжи 4, установленной между щелерезами 2, с открытой двойной оптоэлектронной парой, состоящей из светоизлучающего инфракрасного диода 5 и инфракрасных фотодиодов 6, 7 (соответственно VD1, VD2 по фиг.5), механической оптической шторкой 8 управления оптической связью в оптоэлектронной паре, электронно-механическим датчиком предельного замедления рыхлителя 9 на кронштейне рамы рыхлителя 1. Информационно-логический исполнительный блок постоянной глубины обработки почвы рыхлителем по фиг.3 содержит исполнительный сервопривод с оптоэлектронными датчиками положения рычага управления гидравлической системой трактора и информационно-логическую электронную систему управления. Информационно-логический исполнительный блок постоянной глубины обработки почвы содержит исполнительный сервопривод с вилкой привода, которой подают механические импульсы манипулирования рычагу гидравлического распределителя штатной навесной гидравлической системы трактора. Блок портативно монтируется над рычагом гидравлического распределителя управления силовым цилиндром штатной навесной системы трактора. Информационно-логический исполнительный блок содержит информационно-логическую электронную систему управления 10. Исполнительный сервопривод информационно-логического исполнительного блока содержит продольную направляющую оптико-механическую систему с оптико-механической обратной связью управления исполнительной механической вилкой привода, включающую реверсивный электродвигатель постоянного тока 11 с ведущей шестерней 12, блок промежуточных шестерней 13, блок оптронных пар: инфракрасные фотодиоды 14 (обозначения фотодиодов VD4-VD7 по фиг.5), излучающие инфракрасные диоды 15. В корпусе информационно-логического исполнительного блока на механической подвижной продольной направляющей системе установлены: зубчатая рейка механического привода 16, оптическая шторка 17, вилка привода 18. Вилка 3 привода 18 механически воздействует на рычаг управления гидравлического распределителя штатной навесной системы трактора 19 с фиксированными штатными позициями 20 (П - подъем, Н - нейтральное положение, О - опускание, Пл - плавающее). Подвижные элементы устройства показаны в положении «нейтральное» рычага управления гидравлического распределителя управления силовым цилиндром штатной навесной системы трактора. Датчик положения навесной системы трактора по фиг.4 содержит оптическую шторку 21, установленную на верхнем валу навесной системы трактора 25, которая управляет оптической связью в открытых оптоэлектронных парах между светоизлучающим инфракрасным диодом 22 и инфракрасным фотодиодом 23 (VD8 по фиг.5), инфракрасным диодом 26 и инфракрасным фотодиодом 27 (VD3 фиг.5). Оптоэлектронные пары установлены в едином блоке на неподвижном относительно трактора кронштейне 24 верхнего вала навесной системы трактора 25. Инфракрасный фотодиод 23 контролирует угол наклона карданного вала привода рыхлителя в транспортном положении -25° относительно продольной оси трактора. Инфракрасный фотодиод 26 контролирует угол наклона карданного вала привода рыхлителя в рабочем положении +15° относительно продольной оси трактора. Информационно-логическая электронная система управления по фиг.5 содержит задающий генератор на инверторах на логических элементах «2и-не» DD1.1, DD1.2, резисторе R1, конденсаторе С1; блок регистрации информации о глубине обработки почвы на инфракрасных фотодиодах VD1, VD2 (6, 7 по фиг.1, 2), задающих начальный ток инфракрасных фотодиодов резисторах R2, R3, инверторе на логическом элементе «2и-не» DD1.3, логическом элементе «2и-не» DD1.4, фильтре низких частот на резисторе R5 и конденсаторе С2, D-триггерах DD2.1, DD2.2; блок принудительного извлечения фронтального ротационного внутрипочвенного рыхлителя из почвы на двухпозиционном переключателе SA1; блок оптико-механической фиксации нейтрального положения механической оптической шторки на логическом элементе «2и-не» DD3.1, резисторе R6, инфракрасном фотодиоде VD4 (по фиг.4 исключает самопроизвольное смещение шторки 8 вниз), на логическом элементе «2и-не» DD3.2, резисторе R7, инфракрасном фотодиоде VD5 (по фиг.4 исключает самопроизвольное смещение шторки 8 вверх); оптико-механический блок контроля исполнения логических команд на логическом элементе «4и-не» DD4.1, резисторе R8, инфракрасном фотодиоде VD6 (по фиг.4 фиксация вилки в положении «подъем»), на логическом элементе «4и-не» DD4.2, резисторе R9, инфракрасном фотодиоде VD7 (по фиг.4 фиксация вилки в положении «опускание»); оптико-механический блок защиты рыхлителя и трактора от механических перегрузок, содержащий узел контроля предельного угла наклона карданного вала привода рыхлителя не более +15° относительно продольной оси трактора с оптической шторкой 10 по фиг.4 с открытой оптоэлектронной парой на светоизлучающем инфракрасном диоде (5 по фиг.1, 2), инфракрасном фотодиоде VD3, задающим ток резистором R4; блок предельного замедления рыхлителя с датчиком КА1, фильтром низких частот па резисторе R12 и конденсаторе С3, ждущим мультивибратором на логических элементах «2и-не» DD3.3, DD3.4, конденсаторе С4 и резисторе R13; оптико-механический блок контроля угла наклона карданного вала в транспортном положении -25° относительно продольной оси трактора по фиг.4 с оптической шторкой 21 в открытой оптоэлектронной паре на светоизлучающем инфракрасном диоде 26, инфракрасном фотодиоде 27 (VD8 по фиг.5), на логическом элементе «3или-не» DD5.2, резисторе R16; блок электронного включения вала отбора мощности на нормально разомкнутом однопозиционном переключателе SA2, резисторах R14, R15, конденсаторе С5, инверторе на логическом элементе «3или-не» DD5.1, D-триггере DD6.1; блок электронного включения информационно-логического исполнительного устройства на нормально разомкнутом однопозиционном переключателе SA3, резисторе R17, конденсаторе С6, инверторе на логическом элементе «3или-не» DD5.3, D-триггере DD6.2; исполнительный блок на ключевых транзисторах VT1-VT6 с реверсивным электродвигателем постоянного тока M1; блок электронного включения ждущего режима информационно-логического управления при ручном воздействии на рычаг гидравлического распределителя штатной навесной системы трактора на резисторах R18, R19, R20, конденсаторе С7, транзисторе VT7 с узлом подготовки включения ждущего режима устройства в момент включения питания информационно-логической электронной системы на диоде VD9. Информационно-логическая электронная система управления но фиг.5 регистрирует заданный режим фронтального ротационного внутрипочвенного рыхлителя 1 по фиг.1 (D-триггеры DD2.1, DD2.2), задает предел перемещения оптической шторки 17 информационно-логического исполнительного блока по фиг.3 (инфракрасные фотодиоды VD6, VD7), разрешает возврат оптической шторки 17 информационно-логического исполнительного блока по фиг.3 из верхнего (нижнего) рабочего положения в нейтральное (инфракрасные (фотодиоды VD4, VD5), вырабатывает сигналы управления электродвигателем M1 (ключи VT1-VT6). Фронтальный ротационный внутрипочвенный рыхлитель 1 со щелерезами привода 2, валом фрезерователя 3 в исходном положении поднят над поверхностью почвы навесной системой трактора. Рычаг управления гидравлическим распределителем навесной системы трактора находится в положении «нейтральное». Устройство для управления глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем работает следующим образом. В режиме предельного состояния устройства отключаются трансмиссия и вал отбора мощности трактора. Это выполняется следующим образом. Логическая электронная система управления информационно-логического исполнительного блока постоянной глубины обработки почвы фронтальным ротационным внутрипочвенным рыхлителем по сигналу электронно-механического датчика предельного замедления рабочего органа фронтального ротационного внутрипочвенного рыхлителя вырабатывает сигнал экстренного аварийного отключения трансмиссии трактора и вала отбора мощности. Узел предельного замедления рыхлителя логической электронной системы управления информационно-логического исполнительного блока постоянной глубины обработки почвы фронтальным ротационным внутрипочвенным рыхлителем срабатывает от электронно-механического датчика предельного замедления рыхлителя по фиг.5 КА1 (9 по фиг.1), который закреплен на присоединительном кронштейне рамы рыхлителя. В исходном положении на выходе датчика устанавливается логический уровень 1. В момент когда рыхлитель наталкивается на препятствие, датчик КА1 вырабатывает короткий отрицательный электрический импульс. Фильтр низких частот на резисторе R12 и конденсаторе С3 исключает ложное срабатывание узла предельного замедления. Отрицательный электрический импульс с датчика КА1 поступает на ждущий мультивибратор на логических элементах «2и-не» DD3.3, DD3.4, конденсаторе С4 и резисторе R13, ждущий мультивибратор вырабатывает отрицательный электрический импульс на выходе логического элемента «2и-не» DD3.4. Импульс отключает трансмиссию трактора посредством его штатного исполнительного устройства. Продолжительность импульса ждущего мультивибратора 3 Информационно-логический исполнительный блок постоянной глубины обработки почвы рыхлителем имеет возможность номинального и экстренного электронного включения/выключения вала отбора мощности трактора. Логическая электронная система управления по сигналу датчика угла наклона вала отбора мощности трактора -25°, относительно продольной оси трактора вырабатывает сигнал, разрешающий включение вала отбора мощности трактора при угле его наклона относительно продольной оси трактора более -25°, и сигнал принудительного отключения вала отбора мощности трактора при угле его наклона менее -25°. Узел электронного включения/выключения вала отбора мощности трактора исходно находится в состоянии запрета включения согласно сигналам логического уровня от инфракрасных фотодиодов VD3, VD8. Карданный вал привода фронтального ротационного внутрипочвенного рыхлителя в исходном положении располагается под углом -35 Логическая электронная система управления по сигналу датчика угла наклона вала отбора мощности трактора +15° вырабатывает сигнал запрета заглубления рыхлителя при угле наклона вала отбора мощности относительно продольной оси трактора более +15°. По фиг.4 оптическая шторка 21 включает оптическую связь в открытой оптоэлектронной паре светоизлучающий инфракрасный диод 26 - инфракрасный фотодиод 27 (VD3 по фиг.5), на нижнем по фиг.5 входе логического элементе «2и-не» DD1.4 устанавливается логический уровень 0. Независимо от состояния инфракрасного фотодиода VD2 на D входе D-триггера DD2.2 устанавливается логический уровень 1, логически запрещающий установку рычага гидравлического распределителя штатной навесной системы трактора в положение «опускание». Вал отбора мощности полностью отключается посредством нажатия кнопки переключателя SA2 информационно-логического электронного блока. При нажатии кнопки переключателя SA2 на входе инвертора на логическом элементе «3или-не» DD5.1 устанавливается логический уровень 0, на выходе - логический уровень 1, на входе С D-триггера DD6.1 формируется фронт импульса, по которому по входу D в триггер DD6.1, который включен по схеме двоичного счета импульсов, с инверсного выхода записывается логический уровень 0. На инверсном выходе триггера DD6.1 формируется логический уровень 1, который через логический элемент «3или-не» DD5.2 запрещает подключение вала отбора мощности к рыхлителю. Повторное нажатие на кнопку переключателя SA2 возвращает узел электронного включения вала отбора мощности в исходное состояние разрешения включения вала отбора мощности. Устройство в номинальном режиме работает следующим образом. Управление глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем ведут по электронно-логическим сигналам датчика положения рабочего органа фронтального ротационного внутрипочвенного рыхлителя относительно поверхности почвы с помощью информационно-логического исполнительного блока постоянной глубины обработки почвы. При включении электрического питания информационно-логический исполнительный блок постоянной глубины обработки почвы рыхлителем находится в исходном положении, информационно-логическая электронная система управления устанавливается в ждущий режим. По фиг.5 конденсатор С7 разряжен. Электрический ток проходит по цепи на резисторах R18, R19, R20, конденсаторе С7, открывает транзистор VT7, который подключает резистор R21 и установочные входы D-триггеров «R» DD2.1, «S» DD2.2, «S» DD6.1 и «S» DD6.2 к потенциалу «+» источника питания. При этом на инверсном выходе D-триггера DD2.1 устанавливается логический уровень 1, на прямом выходе D-триггера DD2.2 устанавливается логический уровень 1, на прямом выходе D-триггера DD6.1 устанавливается логический уровень 1, на инверсном - логический уровень 0, на инверсном выходе D-триггера DD6.2 устанавливается логический уровень 0. Через период, соответствующий постоянной времени цепи R18, R19, С7, конденсатор С7 заряжается до потенциала источника питания, транзистор VT7 закрывается, на соответствующих установочных входах D-триггеров через резистор R21 устанавливается логический уровень 0. Переключатель SA1 переводят в замкнутое состояние контактов. Установка информационно-логической электронной системы управления в ждущий режим завершена. По фиг.3 после подключения электрического питания и установки информационно-логического электронного блока в ждущий режим двигатель 10 обесточен, цилиндрические зубчатые шестерни передачи 12, 13, 16 находятся в свободном состоянии на своих осях. Они оказывают небольшое инерционное механическое демпфирующее действие на рычаг управления 19 гидравлического распределителя штатной навесной системы трактора, не препятствующее работе распределителя по штатной схеме. Рычагом управления 19 распределителя манипулируют вручную. Для выполнения технологического процесса внутрипочвенного рыхления оператор включает трансмиссию трактора, начинает движение в выбранном направлении обработки и по фиг.5 нажатием кнопки переключателя SA3 включает информационно-логический электронный блок в активный режим. На входе инвертора на логическом элементе «3или-не» DD5.3 устанавливается логический уровень 0, на выходе логического элемента «3или-не» DD5.3 - логический уровень 1, на входе С D-триггера DD6.2 формируется фронт импульса, по которому по входу D в триггер DD6.2 записывается логический уровень 0, на инверсном выходе триггера DD6.2 формируется логический уровень 1, который через логические элементы «4и-не» DD4.1, DD4.2 разрешает работу исполнительного узла на ключевых транзисторах VT1-VT6 и реверсивном электродвигателе постоянного тока M1. Инфракрасные фотодиоды VD1 и VD2 (6, 7 по фиг.1, 2) дают информацию о глубине погружения рабочего органа фронтального ротационного внутрипочвенного рыхлителя в почву. Если опорная лыжа 4 по фиг.1, 2 находится в свободном положении или едва касается почвы, оптическая шторка 8 по фиг.1, 2 находится в нижнем положении, двухпозиционный переключатель SA1 находится в замкнутом положении, инфракрасный фотодиод VD1 (6 по фиг.1, 2) облучается излучающим инфракрасным диодом 5 по фиг.1, 2. На входе D D-триггера DD2.1 устанавливается логический уровень 0. Инфракрасный фотодиод VD2 (7 по фиг.1, 2) облучается излучающим инфракрасным диодом 5 по фиг.1, 2. На входе инвертора на логическом элементе «2и-не» DD1.3 устанавливается логический уровень 0, на верхнем по фиг.5 входе логического элемента DD1.4 устанавливается логический уровень 1. По фиг.4 оптическая шторка 21, установленная на верхнем валу навески 25, в исходном положении перекрывает установленную на неподвижном относительно трактора кронштейне верхнего вала навески открытую оптоэлектронную пару. Инфракрасный светодиод 22 не облучает инфракрасный фотодиод 23 (VD3 фиг.5), контролирующий положение карданного вала привода рыхлителя не более +15° относительно продольной оси трактора. На нижнем по фиг.5 входе логического элемента DD1.4 устанавливается логический уровень 1. Поскольку на оба входа логического элемента DD1.4 подан логический уровень 1, на его выходе и на входе D D-триггера DD2.2 устанавливается логический уровень 0. Задающий генератор на инверторах DD1.1, DD1.2 вырабатывает импульсы согласно постоянной времени цепи резистора R1 и конденсатора С1. Периодичность следования импульсов 0,3-0,5 сек. По фронту импульса задающего генератора, поступающему на вход С D-триггера DD2.1, по входу D триггера DD2.1 с инфракрасного фотодиода VD1 записывается логический уровень 0. На инверсном выходе триггера DD2.1 формируется логический уровень 1. Одновременно по этому же фронту импульса по входу D триггера DD2.2 с выхода логического элемента DD1.4 через R5 и конденсатор С2 записывается логический уровень 0, на прямом выходе триггера DD2.2 формируется логический уровень 0. В положении «нейтральное» информационно-логического исполнительного устройства постоянной глубины обработки почвы рыхлителем по фиг.3 оптическая шторка 17 разрывает оптическую связь в открытых оптоэлектронных инфракрасных парах 14, 15. При этом по фиг.5 инфракрасный фотодиод VD4 обесточен, и на верхнем входе логического элемента DD3.1 через резистор R6 устанавливается логический уровень 1. Инфракрасный фотодиод VD5 также обесточен, на верхнем по фиг.5 входе логического элемента DD3.2 через резистор R7 устанавливается логический уровень 1. На выходе логического элемента DD3.1 формируется логический уровень 0, на выходе логического элемента DD3.2 формируется логический уровень 1. Одновременно по фиг.3 оптическая шторка 17 разрывает оптическую связь также и в открытых оптоэлектронных инфракрасных парах с инфракрасными фотодиодами по фиг.5 VD6, VD7, на верхних по схеме входах логических элементов «4и-не» DD4.1, DD4.2 формируется логический уровень 1. На нижний вход логического элемента «4и-не» DD4.1 с прямого выхода триггера DD2.2 подан логический уровень 0, поэтому на выходе логического элемента «4и-не» DD4.1 устанавливается логический уровень 1. На нижний по фиг.5 вход логического элемента «4и-не» DD4.2 с инверсного выхода триггера DD2.1 подан логический уровень 1, т.е. логический уровень 1 установлен на всех входах логического элемента «4и-не» DD4.2. Поэтому при исходном положении фронтального ротационного внутрипочвенного рыхлителя на выходе логического элемента «4и-не» DD4.2 устанавливается логический уровень 0. Логический уровень 0 на выходе логического элемента «4и-не» DD4.2 приводит к открыванию транзисторных ключей VT2, VT4, VT5, которые подключают электродвигатель постоянного тока M1 (11 по фиг.3) к источнику электрического питания. По фиг.3 электродвигатель 11 через ведущую шестерню 12, блок промежуточных шестерней 13, зубчатую рейку механического привода 16 перемещает вниз механическую подвижную продольную направляющую систему с оптической шторкой 17, вилкой привода 18. В момент включения двигателя M1 по фиг.5 на резисторе R18 возникает короткий импульс падения напряжения, который сглаживает фильтр низких частот на резисторе R19, конденсаторе С7. Потенциал на резисторе R20 изменяется меньше, чем это необходимо для включения перехода «база-эмиттер» биполярного транзистора VT7, который не открывается и не меняет состояние логического уровня 0 установочных входов триггеров. По фиг.3 вилка 18 в автономном режиме работы устройства без вмешательства оператора переводит рычаг управления гидравлического распределителя штатной навесной системы трактора 19 в положение «опускание». Оптическая шторка 17 включает оптическую связь в открытой оптоэлектронной инфракрасной паре с инфракрасным фотодиодом по фиг.5 VD7. На верхнем по фиг.5 входе логического элемента «4и-не» DD4.2 устанавливается логический уровень 0. Выход элемента «4и-не» DD4.2 переключается в состояние логического уровня 1, происходит закрывание транзисторных ключей VT2, VT4, VT5, которые отключают электродвигатель постоянного тока M1 (2 по фиг.4) от источника электрического питания. По фиг.3 электродвигатель 11, ведущая шестерня 12, блок промежуточных шестерней 13, зубчатая рейка механического привода 16, механическая подвижная продольная направляющая система с оптической шторкой 17, вилкой привода 18 останавливаются в положении «опускание», в котором удерживаются фиксатором гидравлического распределителя штатной навесной системы трактора. По фиг.3 в нижнем положении оптической шторки 17 инфракрасный фотодиод VD4 облучается. По фиг.5 на верхнем входе логического элемента DD3.1 устанавливается логический уровень 0 (логический уровень 1 на нижнем по фиг.5 входе логического элемента DD3.1 сохраняется). На выходе логического элемента DD3.1 устанавливается логический уровень 1. Информационно-логический исполнительный блок постоянной глубины обработки почвы рыхлителем завершил перевод навесной системы трактора в положение «опускание». В положении «опускание» гидравлический распределитель штатной навесной системы трактора направляет по гидравлической системе трактора масло в верхнюю полость силового цилиндра. Навесная система трактора опускается, верхний вал навески проворачивается так, что при угле наклона карданного вала привода рыхлителя -25° относительно продольной оси трактора по фиг.5 включается оптическая связь в открытой оптоэлектронной инфракрасной паре с инфракрасным фотодиодом VD8, который облучается и формирует уровень логического 0 на среднем входе логического элемента «3или-не» DD5.2. На выходе логического элемента «3или-не» DD5.2 формируется логический уровень 1 (логический уровень 0 на двух оставшихся входах логического элемента «3или-не» DD5.2 установлен соответственно с выхода логического элемента «2и-не» DD3.3 и с прямого выхода триггера DD6.1). Включается вал отбора мощности трактора. Навеска продолжает опускаться, рыхлитель приходит в контакт с почвой, щелерезы и фрезерователь заглубляются в почву. По достижении рыхлителем заданной глубины обработки опорная лыжа опирается на почву и скользит по ней. Опорная лыжа имеет протяженную зону контакта с почвой в направлении проведения фронтального рыхления и интегрирует неровности рельефа значительно лучше, чем стандартное копирующее колесо. Опорная лыжа рыхлителя касается почвы и испытывает механическую упругую деформацию. Положение и жесткость лыжи выбраны так, что при силе реакции опоры лыжи на почву в пределах 0,1 веса рыхлителя устройство устанавливает заданную глубину обработки почвы. Сопротивление трения скольжения опорной лыжи по почве невелико. Контролируя устройством вертикальную нагрузку на опорную лыжу, одновременно, посредством навесной системы трактора переносят 0,9 массы рыхлителя на задние колеса трактора, что увеличивает загрузку задних колес трактора, улучшает их сцепление с почвой, уменьшает пробуксовку трансмиссии. В момент когда устанавливается заданная глубина обработки почвы, по фиг.1, 2 механическая шторка 8 отключает оптическую связь в открытой оптоэлектронной инфракрасной паре с инфракрасным фотодиодом по фиг.5 VD2 (7 по фиг.1, 2). На входе инвертора на логическом элементе «2и-не» DD1.3 устанавливается логический уровень 1, на верхнем по фиг.5 входе логического элемента DD1.4 устанавливается логический уровень 0 (на нижнем по фиг.5 входе логического элемента DD1.4 сохраняется логический уровень 1). Поскольку на один из входов логического элемента DD1.4 подан логический уровень 0, на его выходе и, через фильтр низких частот R5C2, устраняющий влияние шумовой составляющей механической системы «почва - опорная лыжа» на логическое состояние системы управления, на входе DD-триггера DD2.2 устанавливается логический уровень 1. По очередному фронту импульса с задающего генератора, поступающему на вход С D-триггера DD2.2, по входу D триггера DD2.2 с выхода логического элемента DD1.4 записывается логический уровень 1, на прямом выходе триггера DD2.2 формируется логический уровень 1 (состояние D триггера DD2.1 не изменяется). На выходе логического элемента DD3.2 формируется логический уровень 0. На нижний по фиг.5 вход логического элемента «4и-не» DD4.1 с прямого выхода триггера DD2.2 подается логический уровень 1 (на оставшихся входах логический уровень 1 установился ранее), поэтому на выходе логического элемента «4и-не» DD4.1 устанавливается логический уровень 0 (выход элемента «4и-не» DD4.2 остается в состоянии логического уровня 1). Логический уровень 0 на выходе логического элемента «4и-не» DD4.1 приводит к открыванию транзисторных ключей VT1, VT3, VT6, которые подключают электродвигатель постоянного тока M1 (11 по фиг.3) к источнику электрического питания. По фиг.3 электродвигатель 11 через ведущую шестерню 12, блок промежуточных шестерней 13, зубчатую рейку механического привода 16 перемещает вверх по фиг.3 механическую подвижную продольную направляющую систему с оптической шторкой 17, вилкой привода 18. Вилка 18 переводит рычаг управления гидравлического распределителя штатной навесной системы трактора 19 в положение «нейтральное». Оптическая шторка 17 выключает по фиг.5 оптическую связь в открытой оптоэлектронной инфракрасной паре с инфракрасным фотодиодом VD4. На верхнем по фиг.5 входе логического элемента «2и-не» DD3.1 через резистор R6 устанавливается логический уровень 1. Выход логического элемента «2и-не» DD3.1 переходит в состояние 0, выход элемента «4и-не» DD4.1 переключается в состояние логического уровня 1, происходит закрывание транзисторных ключей VT1, VT3, VT6, которые отключают электродвигатель постоянного тока M1 (11 по фиг.3) от источника электрического питания. По фиг.3 электродвигатель 11, ведущая шестерня 12, блок промежуточных шестерней 13, зубчатая рейка механического привода 16, механическая подвижная продольная направляющая система с оптической шторкой 17, вилкой привода 18 останавливаются в положении «нейтральное», в котором удерживаются фиксатором гидравлического распределителя штатной навесной системы трактора. Информационно-логический исполнительный блок постоянной глубины обработки почвы рыхлителем завершил перевод рыхлителя в режим работы на заданной глубине обработки почвы. В процессе работы рыхлителя карданный вал привода может получить наклон +15° относительно продольной оси трактора. При этом, как указано выше, срабатывает узел оптико-механической фиксации положения карданного вала привода рыхлителя не более +15° относительно продольной оси трактора. Глубина обработки почвы рыхлителем не увеличивается. В процессе работы навесной системы трактора в положении «нейтральное» на неровностях рельефа поля рыхлитель может быть заглублен в почву на глубину, несколько большую заданной. По фиг.1, 2 опорная лыжа 4 испытывает повышенную механическую упругую деформацию, и шторка 8 отключает оптическую связь в открытой оптоэлектронной инфракрасной паре с инфракрасным фотодиодом 6 (VD1 по фиг.5). По фиг.5 оптическая связь в оптоэлектронной инфракрасной паре с инфракрасным фотодиодом VD2 была отключена ранее в момент достижения заданной глубины обработки почвы. На входе D D-триггера DD2.1 через резистор R2 устанавливается логический уровень 1. По очередному фронту импульса с задающего генератора, поступающему на вход С D-триггера DD2.1, по входу D триггера DD2.1 с инфракрасного фотодиода VD1 записывается логический уровень 1, на инверсном выходе триггера DD2.1 формируется логический уровень 0. Состояние D триггера DD2.2 не изменяется, на его прямом выходе сохраняется логический уровень 1. На выходе логического элемента DD3.1 формируется логический уровень 1. На вход логического элемента «4и-не» DD4.1 с выхода логического элемента DD3.1 подается логический уровень 1 (на оставшихся входах логический уровень 1 установился ранее). Поэтому на выходе логического элемента «4и-не» DD4.1 устанавливается логический уровень 0 (выход элемента «4и-не» DD4.2 остается в состоянии логического уровня 1). Логический уровень 0 на выходе логического элемента «4и-не» DD4.1 приводит к открыванию транзисторных ключей VT1, VT3, VT6, которые подключают электродвигатель постоянного тока M1 к источнику электрического питания. По фиг.3 электродвигатель 11 через ведущую шестерню 12, блок промежуточных шестерней 13, зубчатую рейку механического привода 16 перемещает вверх механическую подвижную продольную направляющую систему с оптической шторкой 17, вилкой привода 18. Вилка привода 18 переводит рычаг управления гидравлического распределителя штатной навесной системы трактора 19 в положение «подъем». Оптическая шторка 17 включает по фиг.5 оптическую связь в открытой оптоэлектронной инфракрасной паре с инфракрасным фотодиодом VD6. На верхнем входе логического элемента «4и-не» DD4.1 устанавливается логический уровень 0. Выход элемента «4и-не» DD4.1 переключается в состояние логического уровня 1, происходит закрывание транзисторных ключей VT1, VT3, VT6, которые отключают электродвигатель постоянного тока M1 от источника электрического питания. По фиг.3 электродвигатель 11, ведущая шестерня 12, блок промежуточных шестерней 13, зубчатая рейка механического привода 16, механическая подвижная продольная направляющая система с оптической шторкой 17, вилкой привода 18 останавливаются в положении «подъем», в котором удерживаются фиксатором гидравлического распределителя 19 штатной навесной системы трактора. В положении «подъем» гидравлический распределитель штатной навесной системы трактора направляет по гидравлической системе трактора масло в нижнюю полость силового цилиндра, навеска поднимает рыхлитель к поверхности почвы. Упругая механическая деформация опорной лыжи рыхлителя уменьшается, шторка 8 по фиг.1, 2 включает оптическую связь по фиг.5 в открытой оптоэлектронной инфракрасной паре с инфракрасным фотодиодом VD1. На входе D D-триггера DD2.1 устанавливается логический уровень 0. По очередному фронту импульса с задающего генератора, поступающему на вход С D-триггера DD2.1, по входу D триггера DD2.1 с инфракрасного фотодиода VD1 записывается логический уровень 0, на инверсном выходе триггера DD2.1 формируется логический уровень 1 (состояние D триггера DD2.2 не изменяется). На выходе логического элемента DD3.1 формируется логический уровень 0. На нижний вход логического элемента «4и-не» DD4.2 с инверсного выхода триггера DD2.1 подается логический уровень 1 (на оставшихся входах логический уровень 1 установился ранее). Поэтому на выходе логического элемента «4и-не» DD4.2 устанавливается логический уровень 0 (выход элемента «4и-не» DD4.1 остается в состоянии логического уровня 1). Логический уровень 0 на выходе логического элемента «4и-не» DD4.2 приводит к открыванию транзисторных ключей VT2, VT4, VT5, которые подключают электродвигатель постоянного тока M1 к источнику электрического питания. По фиг.3 электродвигатель 11 через ведущую шестерню 12, блок промежуточных шестерней 13, зубчатую рейку механического привода 16 перемещает вниз по фиг.3 механическую подвижную продольную направляющую систему с оптической шторкой 17, вилкой привода 18. Вилка привода 18 переводит рычаг управления гидравлического распределителя штатной навесной системы трактора 19 в положение «нейтральное». По фиг.3 оптическая шторка 17 выключает по фиг.5 оптическую связь в открытой оптоэлектронной инфракрасной паре с инфракрасным фотодиодом VD5. На верхнем входе логического элемента «2и-не» DD3.2 через резистор R7 устанавливается логический уровень 1. Выход логического элемента «2и-не» DD3.2 переходит в состояние 0, выход элемента «4и-не» DD4.2 переключается в состояние логического уровня 1, происходит закрывание транзисторных ключей VT2, VT4, VT5, которые отключают электродвигатель постоянного тока M1 от источника электрического питания. По фиг.3 электродвигатель 11, ведущая шестерня 12, блок промежуточных шестерней 13, зубчатая рейка механического привода 16, механическая подвижная продольная направляющая система с оптической шторкой 17, вилкой привода 18 останавливаются в положении «нейтральное», в котором удерживаются фиксатором гидравлического распределителя 19 штатной навесной системы трактора. Рыхлитель приподнят и возвращен на заданную глубину обработки почвы. При описании информационно-логической электронной системы управления указано, что по фиг.3 инфракрасные фотодиоды 14 (VD4-VD7) исключают самопроизвольное смещение шторки 17 вниз или вверх. Результат достигается тем, что механическая подвижная продольная направляющая система информационно-логического исполнительного блока постоянной глубины обработки почвы рыхлителем, оптическая шторка 17, излучающие инфракрасные диоды 15, инфракрасные фотодиоды VD4-VD7 образуют систему с обратной отрицательной оптоэлектронной механической связью. Обратная связь исключает паразитное действие вилки 18 на рычаг управления гидравлического распределителя штатной навесной системы трактора 19 при механических вибрациях, которые испытывает механическая подвижная продольная направляющая система в процессе движения трактора. Оптико-механическая фиксация нейтрального положения по фиг.3 оптической шторки 17 исключает ее самопроизвольное смещение вниз или вверх в результате действия электрических цепей соответственно по фиг.5: логический элемент «2и-не» DD3.1, резистор R6, инфракрасный фотодиод VD4, логический элемент «2и-не» DD3.2, резистор R7, инфракрасный фотодиод VD5. Оптико-механическая фиксация по фиг.3 оптической шторки 17 в положении «подъем» исключает ее самопроизвольное смещение вниз по фиг.3 в результате действия электрической цепи логический элемент «4и-не» DD4.1, резистор R8, инфракрасный фотодиод VD6. Оптико-механическая фиксация оптической шторки 17 в положении «опускание» исключает ее самопроизвольное смещение вверх по фиг.3 в результате действия электрической цепи, состоящей из логического элемента «4и-не» DD4.2, резистора R9, инфракрасного фотодиода VD7. Устойчивость сервопривода при внешней вибрации обеспечивают с использованием оптико-механической обратной связи. Подъем работающего рыхлителя из почвы производится в движении агрегата. Оператор для выполнения подъема рыхлителя переводит по фиг.5 переключатель SA1 в положение размыкания контактов. Информационно-логический исполнительный блок постоянной глубины обработки почвы рыхлителем принудительно переключается в режим сигнала избыточного заглубления рыхлителя, поскольку при облученном фотодиоде VD1 происходит разрыв цепи его общего провода переключателем SA1 и через резистор R2 устанавливается уровень логической 1 на D входе D-триггера DD2.1. Навесная система трактора извлекает работающий рыхлитель из почвы. По фиг.4 по достижении угла наклона карданного вала привода рыхлителя в транспортном положении -25° относительно продольной оси трактора оптическая шторка 21 выключает оптическую связь в установленной на неподвижном относительно трактора кронштейне верхнего вала навески открытой оптоэлектронной инфракрасной паре 22, 23. По фиг.5 инфракрасный фотодиод VD8 обесточивается, на среднем входе логического элемента DD5.2 через резистор R16 устанавливается логический уровень 1, запрещающий электронное включение вала отбора мощности. Вал отбора мощности отключается. Подъем навески в диапазоне больших углов наклона карданного вала относительно продольной оси трактора завершается при отключенном вале отбора мощности, что исключает возникновение крутильных колебаний в механической системе «трактор - карданный вал - рыхлитель». После полного подъема навесная система трактора остается в положении «подъем», срабатывает штатный перепускной клапан гидравлической системы. После того как трактор выведен на направление очередного рабочего прохода, оператор переводит переключатель SA1 в положение размыкания контактов. Рыхлитель выполняет очередной рабочий цикл в описанном выше режиме. По завершении внутрипочвенного рыхления информационно-логический исполнительный блок постоянной глубины обработки почвы рыхлителем выключают посредством нажатия переключателя SA3. Процесс работы информационно-логического исполнительного блока постоянной глубины обработки почвы рыхлителем может быть прерван оператором в любой момент. Для этого оператор вручную переводит по фиг.3 рычаг 19 гидравлического распределителя штатной навесной системы трактора из заданного устройством в текущий момент положения (П, Н, О) в любое штатное положение (П, Н, О, Пл). При этом включается оптико-механическая обратная связь но фиг.5 в открытой оптоэлектронной инфракрасной паре с одним из инфракрасных фотодиодов VD4-VD7, по фиг.3 двигатель 11 включается в направлении возврата механической подвижной продольной направляющей системы с оптической шторкой 17 в положение, определенное текущим логическим состоянием информационно-логической электронной схемы управления. Вращению двигателя 11, через вилку 18, зубчатую рейку механического привода 16, блок промежуточных шестерней 13, ведущую шестерню 12 препятствует усилие руки оператора на рычаге 19. Усилие руки заведомо больше усилия, развиваемого двигателем 11 на рейке механического привода 16. При этом по фиг.5 на резисторе R18 возникает падение напряжения, которое вызвано электрическим током через него при торможении двигателя M1. Напряжение на нижнем по фиг.5 выводе резистора R18 через резистор R19, конденсатор С7, резистор R20 с задержкой согласно постоянной времени цепи R19C7 подается на базу транзистора VT7, который открывается и подает на установочные входы триггеров информационно-логической электронной системы управления логический уровень 1. Аналогично информационно-логическая электронная система управления отключается в нештатном режиме при перегрузке ключевых транзисторов VT3-VT6 в случае обрыва, короткого замыкания электрических цепей инфракрасных фотодиодов VD1 или VD2 и одновременного включения транзисторов VT1, VT2. Информационно-логический исполнительный блок постоянной глубины обработки почвы рыхлителем переключается в ждущий режим. Устройство обеспечивает возможность переключения из процессорного управления глубиной обработки почвы в ждущий режим и обратно в любой момент в процессе работы. Устройство обеспечивает возможность при находящемся в ждущем режиме или выключенном информационно-логическом исполнительном блоке управления глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем манипулировать гидравлическим распределителем штатной навесной системы трактора вручную. Использование новых элементов в виде датчика вертикального положения рабочего органа фронтального ротационного внутрипочвенного рыхлителя относительно поверхности почвы по фиг.1, 2 в виде опорной лыжи 4, выполненной на раме рыхлителя 1 с возможностью упругой деформации при вертикальной нагрузке 0,1 веса фронтального ротационного внутрипочвенного рыхлителя 1; механической оптической шторки 8, которая выполнена на верхней поверхности опорной лыжи и оптически связана с двойной оптоэлектронной парой 5, 6, 7, которая установлена на раме фронтального ротационного внутрипочвенного рыхлителя 1; информационно-логического исполнительного блока постоянной глубины обработки почвы, содержащего исполнительный сервопривод по фиг.3 с вилкой привода 9 рычага гидравлического распределителя штатной навесной гидравлической системы трактора; электронно-механического датчика предельного замедления рабочего органа фронтального ротационного внутрипочвенного рыхлителя 9 по фиг.1, 2, установленного на раме фронтального ротационного внутрипочвенного рыхлителя; датчика угла наклона вала отбора мощности трактора -25° относительно продольной оси трактора в виде оптико-механического электронного датчика положения, состоящего по фиг.4 из оптико-механической шторки 21, установленной на верхнем вале навесной системы трактора, и оптоэлектронной открытой инфракрасной пары 22, 23, установленной на кронштейне навесной системы трактора; датчика угла наклона вала отбора мощности трактора +15° относительно продольной оси трактора в виде оптико-механического электронного датчика положения, состоящего из оптико-механической шторки, установленной на верхнем вале навесной системы трактора, и оптоэлектронной открытой инфракрасной пары 26, 27, установленной на кронштейне навесной системы трактора; логической электронной системы управления информационно-логического исполнительного блока постоянной глубины обработки почвы фронтальным ротационным внутрипочвенным рыхлителем по фиг.5, которая согласно состоянию элементов управления по электронно-логическим сигналам датчика положения рабочего органа фронтального ротационного внутрипочвенного рыхлителя относительно поверхности почвы, электронно-механического датчика предельного замедления рабочего органа фронтального ротационного внутрипочвенного рыхлителя, датчика угла наклона вала отбора мощности трактора -25° относительно продольной оси трактора, датчика угла наклона вала отбора мощности трактора +15° относительно продольной оси трактора вырабатывает соответствующие заданной глубине обработки почвы фронтальным ротационным внутрипочвенным рыхлителем сигналы, которые задают направление и длительность вращения серводвигателя привода механической вилки привода рычага гидравлического распределителя штатной навесной системы трактора, запрещают опускание навески трактора, отключают трансмиссию и вал отбора мощности трактора, позволяет при движении агрегата управлять глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем с высокой стабильностью, качеством, надежностью и меньшими энергозатратами, т.к. за счет отказа от опорных колес снижаются габариты и масса фронтального ротационного внутрипочвенного рыхлителя, за счет контроля нагрузки на опорную лыжу 0,1 веса фронтального ротационного внутрипочвенного рыхлителя снижается сопротивление перемещению агрегата, повышается загрузка и снижается пробуксовка задних колес трактора, повышается точность соблюдения заданной глубины обработки почвы за счет ее контроля и интегрированного копирования поверхности обрабатываемого поля опорной лыжей вместо колеса, повышается надежность агрегата за счет применения электронно-механического датчика предельного замедления рабочего органа фронтального ротационного внутрипочвенного рыхлителя, датчика угла наклона вала отбора мощности трактора -25° относительно продольной оси трактора, датчика угла наклона вала отбора мощности трактора +15° относительно продольной оси трактора, возможности переключения из процессорного режима управления глубиной обработки почвы в ручной режим и обратно в любой момент в процессе работы без демонтажа устройства. Формула изобретения1. Устройство для управления глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем, отличающееся тем, что оно снабжено датчиком вертикального положения рабочего органа фронтального ротационного внутрипочвенного рыхлителя относительно поверхности почвы в виде опорной лыжи, выполненной на раме рыхлителя с возможностью упругой деформации при вертикальной нагрузке 0,1 веса фронтального ротационного внутрипочвенного рыхлителя, информационно-логическим исполнительным блоком постоянной глубины обработки почвы, логической электронной системой управления исполнительного блока постоянной глубины обработки почвы. 2. Устройство по п.1, отличающееся тем, что оно снабжено механической оптической шторкой, которая выполнена на верхней поверхности опорной лыжи и оптически связана с двойной оптоэлектронной парой, которая установлена на раме фронтального ротационного внутрипочвенного рыхлителя. 3. Устройство по п.1, отличающееся тем, что информационно-логический исполнительный блок постоянной глубины обработки почвы содержит исполнительный сервопривод с вилкой привода рычага гидравлического распределителя штатной навесной гидравлической системы трактора. 4. Устройство по п.1, отличающееся тем, что оно снабжено электронно-механическим датчиком предельного замедления рабочего органа фронтального ротационного внутрипочвенного рыхлителя, установленным на раме фронтального ротационного внутрипочвенного рыхлителя. 5. Устройство по п.1, отличающееся тем, что оно снабжено датчиком угла наклона вала отбора мощности трактора -25° относительно продольной оси трактора в виде оптико-механического электронного датчика положения, состоящего из оптико-механической шторки, установленной на верхнем вале навесной системы трактора, и оптоэлектронной открытой инфракрасной пары, установленной на кронштейне навесной системы трактора. 6. Устройство по п.1, отличающееся тем, что оно снабжено датчиком угла наклона вала отбора мощности трактора +15° относительно продольной оси трактора в виде оптико-механического электронного датчика положения, состоящего из оптико-механической шторки, установленной на кронштейне навесной системы трактора, и оптоэлектронной открытой инфракрасной пары, установленной на верхнем вале навесной системы трактора. 7. Устройство по п.1, отличающееся тем, что посредством логической электронной системы управления исполнительного блока постоянной глубины обработки почвы фронтальным ротационным внутрипочвенным рыхлителем, согласно состоянию элементов управления, по электронно-логическим сигналам датчика положения рабочего органа фронтального ротационного внутрипочвенного рыхлителя относительно поверхности почвы, электронно-механического датчика предельного замедления рабочего органа фронтального ротационного внутрипочвенного рыхлителя, датчика угла наклона вала отбора мощности трактора -25° относительно продольной оси трактора, датчика угла наклона вала отбора мощности трактора +15° относительно продольной оси трактора вырабатывают соответствующие заданной глубине обработки почвы фронтальным ротационным внутрипочвенным рыхлителем сигналы, по которым задают направление и длительность вращения серводвигателя привода механической вилки привода рычага гидравлического распределителя штатной навесной системы трактора, запрещают опускание навески трактора, отключают трансмиссию и вал отбора мощности трактора. MM4A Досрочное прекращение действия патента из-за неуплаты в установленный срок пошлины за поддержание патента в силе Дата прекращения действия патента: 25.03.2011 Дата публикации: 27.01.2012 Популярные патенты: 2228588 Копатель корнеклубнеплодов ... 15, окончательно очищаются от почвы и выносятся на поверхность земли.В результате сложного пространственного гармонического движения лемеха с вилообразными прутками почва постоянно подвергается вибрации в трех взаимно перпендикулярных плоскостях с одновременным импульсивным ударным воздействием (h, 3, L) при копке в продольной плоскости с одновременным гармоническим колебанием, что способствует лучшему дроблению корнеклубненосного пласта и его сепарированию. Следовательно, улучшается очистка корнеклубнеплодов, значительно уменьшается сопротивление почвы, действующее на лемех с вилообразными прутками, уменьшается залипание лемеха, что приводит к меньшим затратам энергии, повышению ... 2492640 Способ выращивания рыбы в мелководных заморных озерах с применением глубокого водоема-спутника ... белого амура и других с применением аэраторов (1).Однако для осуществления известного способа требуются аэраторы большой мощности, т.к. воду аэрируют и рыбу спасают от замора в неограниченном пространстве самого озера, в котором выращивают рыбу. При этом насыщенная кислородом вода, окруженная со всех сторон водой, имеющей низкое содержание кислорода, под действием конвективного обмена, интенсивно перемешивается с ней, распределяется по огромной площади и бесполезно теряет на окисление донных отложений большую часть запаса кислорода.Большая потребляемая мощность, а соответственно, большие затраты средств на аэрацию воды, сильно ограничивают возможности использования этого способа: ... 2420945 Гидравлическая система сельхозмашины ... системы по изобретению с резервным насосом 56 рулевого управления. Резервный насос 56 рулевого управления состоит из гидроцилиндра 57 двухстороннего действия с поршнем 58 и двухсторонним поршневым штоком 59, причем на нижней стороне поршня 58 имеется пружина 61 сжатия для возврата поршня. Верхняя штоковая полость 62 гидроцилиндра 57 питается давлением от стороны питания напорной гидролинии 29 и удерживает поршень 58 в нерабочем положении 63 против действия пружины 61 сжатия. При падении давления в напорной гидролинии 29 поршень 58 переводится силой пружины в рабочее положение 64. В этом рабочем положении 64 поршневой шток 59 поршня 58 находится в кинематическом ... 2120753 Способ получения пестицидного водного суспензионного концентрата и пестицидный водный суспензионный концентрат ... общей формулы (I), используемого в соответствии с настоящим изобретением, то каждая алкильная группа является линейной или разветвленной алкильной группой, содержащей от 1 до 6 углеродных атомов, каждая галоидалкильная группа представляет собой замещенную алкильную группу, содержащую в качестве заместителя (заместителей) один или несколько атомов галогена, которые могут быть как одинаковыми, так и различными, и которые выбирают из класса, включающего в себя атомы хлора, фтора, иода и брома, каждая низшая алкенильная группа представляет собой линейную или разветвленную алкенильную группу, содержащую от 2 до 6 углеродных атомов, а каждая алкинильная группа является линейной или ... 2420940 Энергосберегающий способ обеззараживания семян люпина от антракноза ... на энергозатраты при термическом обеззараживании семян люпина Показатели Единица измерения Влажность теплоносителя, % 75-8030-40 18-20 4-61 2 34 56 Энергия, потребляемая установкойкВт·ч 23,04 13,849,04 7,45Удельные затраты электроэнергии, при толщине продуваемого слоя семян: А) 0,010 м 245,8 147,6 96,479,5 Б) 0,15 м 163,9 98,4 64,353,0 В) 0,20 м 122,9 73,8 48,239,7 Удельные энергозатраты на тонну прогретых семян, при этом, в зависимости от толщины продуваемого слоя, снижаются от 122,9-163,8 до 39,7-53,0 кВт·ч/т. В результате исследований установлена возможность существенного снижения энергозатрат на термическое обеззараживание ... |
Еще из этого раздела: 2407280 Устройство и способ для осушения воздуха в теплице и теплица 2075933 Композиция для иммунизации растений от различных фитопатогенов 2054872 Гербицидная композиция и способ борьбы с сорняками 2452155 Лапа культиватора 2453091 Способ обработки почвы 2271095 Многофункциональное устройство 2123784 Сетное каскадное устройство для промысла поверхностных объектов лова 2243658 Способ повышения урожайности картофеля и томатов 2302109 Способ снижения уровня никеля и свинца в крови и молоке коров техногенной провинции 2024226 Производные s- -тиоакриламидов и композиция для предотвращения или ингибирования роста бактерий |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||
 2169466 С2, 27.06.2001, А01В 61/00, А01В 33/02 - прототип).
2169466 С2, 27.06.2001, А01В 61/00, А01В 33/02 - прототип). 5 сек, задана постоянной времени цепи C4R13. Одновременно положительный импульс той же продолжительности с выхода логического элемента «2и-не» DD3.3 подает логический уровень 1 запрета включения вала отбора мощности на нижний по фиг.5 вывод логического элемента «3или-не» DD5.2. Постоянная времени цепи C4R13 является достаточной для принятия решения оператором, обслуживающим рыхлитель, о дальнейшем управлении трактором и рыхлителем.
5 сек, задана постоянной времени цепи C4R13. Одновременно положительный импульс той же продолжительности с выхода логического элемента «2и-не» DD3.3 подает логический уровень 1 запрета включения вала отбора мощности на нижний по фиг.5 вывод логического элемента «3или-не» DD5.2. Постоянная времени цепи C4R13 является достаточной для принятия решения оператором, обслуживающим рыхлитель, о дальнейшем управлении трактором и рыхлителем.