Устройство для управления глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем в агрегате с трактором с электрическим управлением гидравлическим распределителем навесной системыПатент на изобретение №: 2418398 Автор: Калиниченко Валерий Петрович (RU), Шаршак Владимир Константинович (RU), Илларионов Виктор Васильевич (RU), Ладан Евгений Пантелеймонович (RU), Генев Евгений Дмитриевич (RU), Подплетний Геннадий Кузьмич (RU), Черненко Владимир Владимирович (RU), Зинченко Владимир Евгеньевич (RU), Ларин Сергей Викторович (RU), Ларина Юлия Валерьевна (RU), Мищенко Николай Анатольевич (RU), Суковатов Владимир Александрович (RU), Иваненко Анна Александровна (RU) Патентообладатель: Федеральное государственное образовательное учреждение высшего профессионального образования "Донской государственный аграрный университет" (ФГОУ ВПО ДГАУ) (RU), Учреждение "Институт плодородия почв юга России" (ИППЮР) (RU) Дата публикации: 10 Декабря, 2010 Начало действия патента: 4 Июня, 2009 Адрес для переписки: 346493, Ростовская обл., Октябрьский р-н, п. Персиановский, Донской государственный аграрный университет ДонГАУ Изображения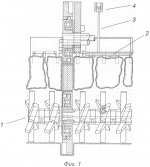 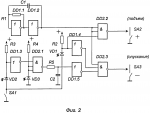 Устройство содержит датчик вертикального положения рабочего органа фронтального ротационного внутрипочвенного рыхлителя относительно поверхности почвы в виде опорного элемента. Опорный элемент закреплен на раме рыхлителя с возможностью перемещения при упругой деформации при вертикальной нагрузке 0,05-0,1 веса фронтального ротационного внутрипочвенного рыхлителя. На верхней поверхности опорного элемента смонтирована механическая оптическая шторка, оптически связанная с двойной оптоэлектронной парой. Оптоэлектронная пара установлена на раме фронтального ротационного внутрипочвенного рыхлителя. Устройство имеет датчик угла наклона вала отбора мощности трактора +15° относительно продольной оси трактора в виде оптико-механического электронного датчика положения. Оптико-механический электронный датчик положения состоит из оптико-механической шторки, оптоэлектронной открытой инфракрасной пары. Оптико-механическая шторка датчика положения установлена на кронштейне навесной системы трактора, а инфракрасная пара установлена на верхнем валу навесной системы трактора. Устройство снабжено логической электронной системой управления постоянной глубиной обработки почвы. Логическая электронная система снабжена электронным манипулятором штатными шаговыми переключателями электрического управления гидравлическим распределителем навесной системы трактора. Такое конструктивное выполнение позволит обеспечить высокую стабильность хода ротационного внутрипочвенного рыхлителя по глубине обработки почвы, повысить качество обработки почвы и надежность работы устройства. 2 ил. Изобретение относится к сельскохозяйственному машиностроению и предназначено для управления глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем. Известен фронтальный ротационный внутрипочвенный рыхлитель, глубина обработки почвы которым регулируется прямым способом путем изменения расположения опорных колес относительно устройства по вертикали (свидетельство СССР Наиболее близким по технической сущности к заявляемому объекту является косвенный способ управления глубиной механической обработки почвы путем гидравлического увеличения сцепного веса трактора (Трактор / ред. М.А.Орлов. М.: Просвещение, 1980. 272 с. С.153 - прототип). В данном устройстве имеется недостаток: - отсутствие прямого регулирования глубины обработки почвы почвообрабатывающей машиной. Технической задачей, для решения которой служит предлагаемое изобретение, является создание условий, при которых обеспечивается прямое устойчивое управление глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем при оборудовании трактора гидравлическим распределителем штатной навесной гидравлической системы с электрическим управлением гидравлическим распределителем. Техническим результатом, получаемым при практическом использовании изобретения, является создание возможности управления глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем в агрегате с трактором, оборудованным электрическим управлением гидросистемой, с высокой стабильностью и качеством. Для решения поставленной технической задачи информационно-логический исполнительный блок постоянной глубины обработки почвы фронтальным ротационным внутрипочвенным рыхлителем снабжен информационно-логической электронной системой управления, которая включена параллельно цепям управления пошаговым опусканием-подъемом штатной навесной гидравлической системы трактора с гидравлическим распределителем с электрическим управлением. Изобретение поясняется прилагаемой схемой, где на фиг.1 показано предлагаемое устройство, вид сзади; на фиг.2 показана принципиальная электрическая схема информационно-логической электронной системы управления устройством для автоматического управления глубиной обработки почвы при фронтальном ротационном внутрипочвенном рыхлении в агрегате с трактором с электрическим управлением гидравлическим распределителем навесной системы. Устройство по фиг.1 состоит из почвообрабатывающей машины с рыхлящим рабочим органом, например фронтального ротационного внутрипочвенного рыхлителя 1, механического датчика положения рыхлителя относительно почвы в виде опорного элемента 2, закрепленного на раме рыхлителя с возможностью перемещения при упругой деформации при вертикальной нагрузке 0,05-0,1 веса фронтального ротационного внутрипочвенного рыхлителя, механической оптической шторки 3, выполненной на верхней поверхности опорного элемента 2 и оптически связанной с двойной открытой оптоэлектронной парой 4, установленной на раме фронтального ротационного внутрипочвенного рыхлителя 1. Информационно-логическая электронная система управления по фиг.2 содержит задающий генератор на инверторах на логических элементах «2и-не» DD1.1, DD1.2, резисторе R1, конденсаторе С1; блок регистрации информации о глубине обработки почвы фронтальным ротационным внутрипочвенным рыхлителем относительно поверхности почвы по фиг.1 на двойной оптоэлектронной паре по фиг.2 с инфракрасным излучающим диодом и инфракрасными фотодиодами VD1, VD2, задающими начальный ток инфракрасных фотодиодов на резисторах R2, R3, инверторе DD1.3, логическом элементе «3и-не» DD2.1, фильтре низких частот на резисторе R5 и конденсаторе С2; блок принудительного извлечения фронтального ротационного внутрипочвенного рыхлителя из почвы на двухпозиционном переключателе SA1; блок защиты рыхлителя и трактора от механических перегрузок содержит узел контроля предельного угла наклона карданного вала привода рыхлителя с оптико-механическим датчиком угла наклона вала отбора мощности трактора +15° относительно продольной оси трактора, состоящим из оптико-механической шторки, установленной на кронштейне навесной системы трактора, и оптоэлектронной открытой инфракрасной пары, установленной на верхнем вале навесной системы трактора, состоящей из светоизлучающего инфракрасного диода и инфракрасного фотодиода VD3 с задающим ток резистором R4; блок электронного манипулирования штатными шаговыми переключателями SA2, SA3 опускания-подъема штатной навесной гидравлической системы трактора с гидравлическим распределителем с электрическим управлением (электронный манипулятор), выполненный на инверторе DD1.5, логических элементах с открытым коллектором «3и-не» DD2.2, DD2.3, выходы которых подсоединены параллельно штатным шаговым переключателям SA2, SA3. Устройство для управления глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем в агрегате с трактором с электрическим управлением гидравлическим распределителем навесной системы работает следующим образом. Фронтальный ротационный внутрипочвенный рыхлитель в исходном положении поднят над поверхностью почвы навесной системой трактора. Информационно-логическая электронная система управления отключена от источника электрического питания. Управление гидравлической навесной системой трактора выполняется по штатной схеме. Включают электрическое питание информационно-логической электронной системы управления. В режиме предельного состояния устройства информационно-логическая электронная система управления отключает режим «опускание» гидросистемы. Это выполняется следующим образом. По сигналу оптоэлектронного датчика при угле наклона вала отбора мощности трактора +15° включается оптическая связь в открытой оптоэлектронной паре с инфракрасным фотодиодом VD3. На нижнем по фиг.2 входе логического элементе «3и-не» DD2.1 устанавливается логический уровень 0. Независимо от состояния инфракрасного фотодиода VD2 на входе инверторе DD1.5 устанавливается логический уровень 1, логически запрещающий электронное замыкание переключателя SА3 логическим элементом с открытым коллектором «3и-не» DD2.3 и подачу импульса «опускание» к штатной навесной системе с электрическим управлением гидравлическим распределителем. Устройство в номинальном режиме работает следующим образом. Управление глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем ведут по электронно-логическим сигналам датчика положения рабочего органа фронтального ротационного внутрипочвенного рыхлителя относительно поверхности почвы на оптоэлектронных парах с инфракрасными фотодиодами VD1, VD2. Для выполнения технологического процесса внутрипочвенного рыхления оператор включает трансмиссию трактора, начинает движение в выбранном направлении обработки, переводит двухпозиционный переключатель SA1 в замкнутое положение. Инфракрасные фотодиоды VD1 и VD2 дают информацию о глубине погружения рабочего органа фронтального ротационного внутрипочвенного рыхлителя в почву. Если опорный элемент рыхлителя, с которым связаны оптоэлектронные пары с инфракрасными фотодиодами VD1, VD2, находится в свободном положении или едва касается почвы, инфракрасный фотодиод VD1 облучается излучающим инфракрасным диодом, на входе инвертора DD1.4 устанавливается логический уровень 0, инфракрасный фотодиод VD2 облучается излучающим инфракрасным диодом, на входе инвертора DD1.3 устанавливается логический уровень 0, на верхнем по фиг.2 входе логического элемента DD2.1 устанавливается логический уровень 1. Оптическая шторка, установленная на верхнем валу навески, в рабочем положении рыхлителя перекрывает установленную на неподвижном относительно трактора кронштейне верхнего вала навески открытую оптоэлектронную пару. При этом инфракрасный светодиод не облучает инфракрасный фотодиод VD3, контролирующий положение карданного вала привода рыхлителя не более +15° относительно продольной оси трактора. На нижнем по фиг.2 входе логического элемента DD2.1 устанавливается логический уровень 1. На оба входа логического элемента DD2.1 подан логический уровень 1, на его выходе и на входе инвертора DD1.5 устанавливается логический уровень 0. Логический уровень 1 на выходе инвертора DD1.5 разрешает работу системы на опускание рабочего органа рыхлителя. Задающий генератор на инверторах DD1.1, DD1.2 вырабатывает импульсы согласно постоянной времени цепи резистора R1 и конденсатора С1. Периодичность следования импульсов 0,3-0,5 с. Положительный импульс задающего генератора поступает на входы логических элементов DD2.2, DD2.3 и разрешает их работу. Логический уровень 0 с открытого инфракрасного фотодиода VD1 запрещает работу логического элемента DD2.2, через инвертор DD1.4 разрешает работу логического элемента DD2.3. С открытого коллектора на выходе логического элемента с открытым коллектором DD2.3 формируются импульсы, которые замыкают штатный переключатель SA3, навеска трактора опускается. В момент достижения заданной глубины обработки оптическая связь в оптоэлектронной паре с фотодиодом VD2 разрывается, на входе инвертора DD1.3 устанавливается логический уровень 0, который через элементы DD2.1, DD1.5 запрещает прохождение импульсов от генератора на штатный переключатель SA3. Заглубление рабочего органа прекращается, рыхлитель работает на заданной глубине. В процессе работы рыхлителя карданный вал привода может получить наклон +15° относительно продольной оси трактора. При этом, как указано выше, срабатывает узел оптико-механической фиксации положения карданного вала привода рыхлителя не более +15° относительно продольной оси трактора. Оптическая шторка, установленная на верхнем валу навески, открывает установленную на неподвижном относительно трактора кронштейне верхнего вала навески открытую оптоэлектронную пару. Инфракрасный светодиод облучает инфракрасный фотодиод VD3, контролирующий положение карданного вала привода рыхлителя не более +15° относительно продольной оси трактора. На нижнем по фиг.2 входе логического элемента DD2.1 устанавливается логический уровень 0. На выходе логического элемента DD2.1 формируется логический уровень 1. Формируется логический уровень 0 на выходе инвертора DD1.5, который запрещает работу системы на опускание рабочего органа рыхлителя. Глубина обработки почвы рыхлителем не увеличивается. В процессе работы навесной системы трактора на неровностях рельефа поля рыхлитель может быть заглублен в почву на глубину, несколько большую заданной, причем отключается оптическая связь в открытой оптоэлектронной инфракрасной паре с инфракрасным фотодиодом VD1. На нижнем по фиг.2 входе D логического элемента DD2.2 через резистор R2 устанавливается логический уровень 1, который разрешает прохождение импульсов от генератора на выход DD2.2, причем на выходе логического элемента с открытым коллектором DD2.3 формируются импульсы, которые замыкают штатный переключатель SA2, навеска трактора поднимается. Рыхлитель возвращается на заданную глубину обработки почвы. В процессе работы рыхлителя карданный вал привода может получить наклон +15° относительно продольной оси трактора. При этом, как указано выше, срабатывает узел оптико-механической фиксации положения карданного вала привода рыхлителя не более +15° относительно продольной оси трактора. Оптическая шторка, установленная на верхнем валу навески, открывает установленную на неподвижном относительно трактора кронштейне верхнего вала навески открытую оптоэлектронную пару. Инфракрасный светодиод облучает инфракрасный фотодиод VD3, контролирующий положение карданного вала привода рыхлителя не более +15° относительно продольной оси трактора. На нижнем по фиг.2 входе логического элемента DD2.1 устанавливается логический уровень 0. На выходе логического элемента DD2.1 формируется логический уровень 1. Формируется логический уровень 0 на выходе инвертора DD1.5, который запрещает работу системы на опускание рабочего органа рыхлителя. Глубина обработки почвы рыхлителем не увеличивается. Подъем работающего рыхлителя из почвы производится в движении агрегата. Для выполнения подъема рыхлителя оператор по фиг.2 переводит переключатель SA1 в положение размыкания контактов. Информационно-логический исполнительный блок постоянной глубины обработки почвы рыхлителем принудительно переключается в режим сигнала избыточного заглубления рыхлителя, поскольку при облученном фотодиоде VD1 происходит разрыв цепи его общего провода переключателем SA1 и через резистор R2 на входе инвертора DD1.4 устанавливается уровень логической 1. Навесная система трактора извлекает работающий рыхлитель из почвы. Подъем навески в диапазоне больших углов наклона карданного вала относительно продольной оси трактора завершают при отключенном вале отбора мощности, чтобы исключить возникновение крутильных колебаний в механической системе «трактор - карданный вал - рыхлитель». Рыхлитель выполняет очередной рабочий цикл в описанном выше режиме. По завершении внутрипочвенного рыхления или в любой момент работы информационно-логическую электронную систему управления выключают, отключив источник электрического питания. Использование нового элемента в виде электронного манипулятора штатным шаговым переключателем электрического управления гидравлическим распределителем навесной системы трактора в составе логической электронной системы управления глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем в агрегате с трактором, оборудованным электрическим управлением гидросистемой, позволяет производить рыхление почвы с высокой стабильностью и качеством, т.к. обеспечивается высокая скорость реакции системы управления заданной глубиной обработки почвы на неровности поверхности поля в направлении обработки агрегатом. Формула изобретенияУстройство для управления глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем в агрегате с трактором с электрическим управлением гидравлическим распределителем навесной системы, содержащее датчик вертикального положения рабочего органа фронтального ротационного внутрипочвенного рыхлителя относительно поверхности почвы в виде опорного элемента, закрепленного на раме рыхлителя с возможностью перемещения при упругой деформации при вертикальной нагрузке 0,05-0,1 веса фронтального ротационного внутрипочвенного рыхлителя, механическую оптическую шторку, выполненную на верхней поверхности опорного элемента и оптически связанную с двойной оптоэлектронной парой, установленной на раме фронтального ротационного внутрипочвенного рыхлителя, датчик угла наклона вала отбора мощности трактора +15° относительно продольной оси трактора в виде оптико-механического электронного датчика положения, состоящего из оптико-механической шторки, установленной на кронштейне навесной системы трактора, и оптоэлектронной открытой инфракрасной пары, установленной на верхнем валу навесной системы трактора, логическую электронную систему управления постоянной глубиной обработки почвы, отличающееся тем, что логическая электронная система снабжена электронным манипулятором штатными шаговыми переключателями электрического управления гидравлическим распределителем навесной системы трактора. MM4A Досрочное прекращение действия патента из-за неуплаты в установленный срок пошлины за поддержание патента в силе Дата прекращения действия патента: 05.06.2011 Дата публикации: 27.03.2012 Популярные патенты: 2199195 Мостовая сельскохозяйственная платформа "сотка" ... колес 14 тележки 13. По середине каждого крайнего поперечного бруса с боковой наружной стороны шарнирно на оси 18 установлена стойка 19, каждая одним концом закреплена на осях 20 колесных пар 21. Две приваренные к брусу проушины 22, между которыми расположена ось 18 шарнира, имеют дополнительные отверстия 23 для фиксации стальным стержнем 24 стойки 19 колесной пары 21 в верхнем запасном или нижнем рабочем положении. Симметрично колесной паре 21 установлена такая же колесная пара 25 на противоположном поперечном брусе. Стойки 19 могут фиксироваться рым-болтами. Уголки 26 - опоры стоек 19 в верхнем положении. Нижние не показаны. Использование ножного и ручного приводов, использование ... 2060651 Бытовой инкубатор ... с зазором относительно поперечных стенок, и источник питания, причем крышка корпуса выполнена из материала с большей теплопроводностью, чем у материала его днища и стенок, а регулируемые вентиляционные отверстия, расположенные над лотком, выполнены в продольных стенках. Система обогрева содержит нагреватель, выполненный в виде витков монтажного провода, размещенных с шагом на рамочном каркасе, и соединенные с ним последовательно переменные резистор и параллельно термистор, размещенные снаружи корпуса, при этом оба подключены к низковольтному источнику питания. Система переворота яиц состоит из сетчатого подвижного поддона лотка, размещенного на рамочном каркасе, неподвижных ... 2415560 Способ выращивания корнесобственных саженцев винограда ... веществ технических сортов позволяет делать качественные вина с высокой степенью ароматичности.Климатические условия юга Северо-Западного Прикаспия во многом близки к условиям степного Крыма, где виноградарство с давних времен получило большое развитие. Географическое расположение Астраханской области выгодно отличается от основных виноградарских районов юга России близостью к основным рынкам сбыта столового винограда. Однако до сегодняшнего времени в Астраханской области не развито промышленное виноградарство. Видимо основной причиной является укоренившееся мнение о суровости зим нашего региона, которое не позволяет развивать виноградарство на больших площадях. Сегодня ... 2265300 Способ борьбы с нежелательной порослью топинамбура ... на территории Российской Федерации, 1999, с.137-140. Приложение к журналу В«Защита и карантин растенийВ») в дозе 4-6 л/га в период массового роста столонов. Срок обработки растений гербицидом определяют по формуле:С=ЧД+10÷15, где С - срок обработки от появления всходов (дней), ЧД - число дней от появления всходов до начала образования столонов,10÷15 - число дней, равное 1/ 2 периода от начала образования столонов до начала образования клубней.Уборка урожая топинамбура может проводиться осенью или весной путем выкопки картофелекопателем с ручной подборкой или специальным комбайном.Согласно изобретению, поверхностная культивация почвы должна проводиться весной, перед ... 2165141 Тепличный гидропонный комплекс ... затратах. Это достигается тем, что в тепличном гидропонном комплексе, содержащем каркас, состоящий из поперечных рам и коньковых прогонов, закрепленное на каркасе светопроницаемое укрывное покрытие, вентиляционные форточки с механизмом их открывания, наружную дверь и размещенные внутри тепличного комплекса установки для выращивания растений, выполненные гидропонными, основание каркаса образует металлическая рама, залитая бетоном, внутри каркаса установлены перегородки, образующие два вегетационных отсека с установками для выращивания растений, и расположенный между ними технологический отсек, в котором размещены блоки управления установками для выращивания растений и ... |
Еще из этого раздела: 2076603 Способ повышения урожайности сельскохозяйственных культур 2495561 Машина лесозаготовительная 2432394 Ингибирование образования биогенного сульфида посредством комбинации биоцида и метаболического ингибитора 2399194 Способ и устройство контроля воздушного режима в корнеобитаемой среде 2177226 Способ защиты растений от болезней, регулирования их роста и защитно-стимулирующий комплекс для его осуществления 2400960 Ориентирующее устройство для корнеплодов конической формы 2115304 Доильный аппарат 2269243 Капсулированный посадочный материал с регулируемыми свойствами и способ его получения 2192721 Орудие для обработки засоленных почв 2146444 Способ выявления и отбора стрессоустойчивых животных |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||
 818512, А01В 49/02, 1981 - аналог).
818512, А01В 49/02, 1981 - аналог).