Способ разработки задающих линий движения для рабочих сельхозмашинПатент на изобретение №: 2412580 Автор: МЕЙЕР ЦУ ХЕЛЛИГЕН Ларс Петер (DE), ДИКХАНС Норберт (DE), БРУННЕРТ Андреас (DE), БЕЕРМАНН Инго (DE) Патентообладатель: КЛААС Зельбстфаренде Эрнтемашинен ГмбХ (DE) Дата публикации: 27 Июля, 2008 Начало действия патента: 15 Января, 2007 Адрес для переписки: 191186, Санкт-Петербург, а/я 230, "АРС-ПАТЕНТ", пат.пов. В.М.Рыбакову, рег. 90 Изображения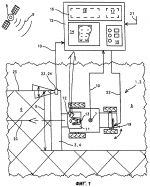 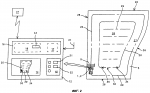 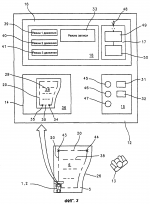 Изобретение относится к сельскому хозяйству. Для генерирования маршрутов движения на территории за рабочей сельхозмашиной закрепляется определенная рабочая ширина захвата. Генерирование маршрутов производится в навигационном модуле, который содержит один или несколько режимов автоматического движения и, по меньшей мере, один режим записи. Режим или режимы автоматического движения и, по меньшей мере, один режим записи могут быть активизированы независимо друг от друга. Предложенный способ позволяет быстро и с высокой точностью намечать маршруты для подлежащей обработке территории со значительным снижением затрат на разработку маршрутов. 9 з.п. ф-лы, 3 ил. Область техники Настоящее изобретение относится к системе маршрутизации для сельскохозяйственных машин в соответствии с ограничительной частью пункта 1 формулы изобретения. Уровень техники Из уровня техники известно множество систем маршрутизации, в которых помимо разработки маршрутов движения транспортного средства, движущегося по подлежащей обработке территории, предусмотрена также автоматическая обработка предварительно запрограммированных маршрутов в указанном транспортном средстве. Так, например, в патенте ФРГ Типовой современный способ маршрутизации во взаимодействии с так называемой системой автоматического вождения по заданной линии раскрыт, в частности, в патентном документе США Раскрытие изобретения Соответственно, задача, на решение которой направлено настоящее изобретение, заключается в устранении недостатков известных решений уровня техники и создании системы маршрутизации, способной быстро и с высокой точностью намечать маршруты для подлежащей обработке территории со значительным снижением затрат на разработку маршрутов. В соответствии с изобретением решение поставленной задачи достигается за счет признаков, изложенных в пункте 1 формулы изобретения. За счет того что в системе маршрутизации имеется навигационный модуль, который содержит один или несколько режимов автоматического движения и, по меньшей мере, один режим записи, при этом режим или режимы автоматического движения и, по меньшей мере, один режим записи могут быть активизированы независимо друг от друга, обеспечивается возможность при эксплуатации рабочей сельхозмашины в режиме автоматического движения одновременной записи задающей линии для режима автоматического движения при будущей обработке. Таким образом, производится обработка с движением по уже существующему маршруту и одновременно разрабатывается новый маршрут, который понадобится в будущем, что значительно снижает затраты на разработку маршрутов системы маршрутизации. В предпочтительном примере осуществления изобретения в одном режиме автоматического движения производится запись определенного участка пути, который одновременно образует задающую линию для одного или нескольких последующих участков пути, подлежащих последующей обработке. Решение имеет особенное преимущество в том, что маршрутизация производится на основе очень точных данных территории, подлежащей обработке, а генерирование этих точных данных в так называемом режиме реального времени не требует непродуктивных вспомогательных проходов для определения необходимых задающих точек подлежащей обработке территории. В дальнейшем предпочтительном примере осуществления определяемые задающей линией участки пути, подлежащие последующей обработке, в модуле функции рядов сводятся воедино в качестве функции рядов. За счет этого разделение территории последующей обработки или участков этой территории определенными маршрутами может быть полностью закончено до того, как будет закончена текущая обработка территории, обрабатываемой транспортным средством. В предпочтительном примере развития изобретения определение участков пути производится путем выбора начальной точки и конечной точки, ограничивающих определяемый участок пути. Благодаря этому оператор транспортного средства может без особых усилий определять конфигурацию новой задающей линии. В очень простом примере выполнения осуществления это достигается таким путем, что начальную точку и конечную точку выбирают посредством генерирования сигналов включения и выключения в устройстве управления и обработки данных. Еще проще это производится в том случае, если в предпочтительном примере осуществления устройство управления и обработки данных содержит блок индикации, выполненный в виде сенсорного монитора, а начальную точку и конечную точку определяют посредством выбора на сенсорном мониторе. При этом оператор совершенно свободен при выборе подходящей задающей линии, поскольку на экране в качестве новой задающей линии может быть определен любой участок пути. В предпочтительном примере осуществления изобретения функция рядов включает в себя разделение подлежащей обработке территории на множество участков пути, так что в ходе единственного шага на участки пути может быть разделена подлежащая обработке территория любой величины. Особенно гибкое использование системы маршрутизации по изобретению достигается в том случае, когда режимы автоматического движения содержат движение по прямолинейному участку, ограниченному начальной точкой и конечной точкой, движение по контурному участку, ограниченному начальной точкой и конечной точкой, и движение по контуру без ограничения начальной точкой и конечной точкой или комбинацию, по меньшей мере, из двух этих режимов автоматического движения. Эта гибкость использования системы маршрутизации дополнительно повышается также, если соответствующий режим автоматического движения может быть выбран свободно, при этом предусмотрена возможность переключения между этими режимами автоматического движения. В дальнейшем предпочтительном примере осуществления в одном режиме автоматического движения производится запись определенного участка пути, и этот определенный участок пути образует задающую линию для функции рядов другого режима автоматического движения. Особенное преимущество решения состоит в том, что в этом любом режиме автоматического движения может генерироваться задающая линия любой структуры, что дает возможность гибкого использования методов генерирования задающей линии. Дальнейшие предпочтительные примеры осуществления являются предметом защиты в зависимых пунктах. Краткий перечень чертежей Далее со ссылками на прилагаемые чертежи будет подробно описан пример осуществления изобретения. На чертежах: фиг.1 изображает на виде сверху рабочую сельхозмашину, при этом подробно показано устройство управления и обработки данных по изобретению, фиг.2 схематично изображает систему маршрутизации по изобретению, фиг.3 схематично изображает устройство управления и обработки данных с программирующим модулем по изобретению. Осуществление изобретения На фиг.1 представлена рабочая сельхозмашина 1, выполненная в виде зерноуборочного комбайна 2. Комбайн 2 снабжен спереди навесным аппаратом 4, выполненным в виде жатвенного аппарата 3 для уборки возделанной культуры 6 на подлежащей обработке территории 5. Комбайн 2 оснащен известным устройством 7 определения положения на основе GPS. Это устройство 7 получает сигналы 9 положения, генерируемые так называемыми спутниками 8 системы GPS, и по этим сигналам генерирует сигналы 10 положения комбайна 2. Кроме того, в кабине 11 водителя комбайна 2 в зоне доступа оператора 13 машины расположено, по меньшей мере, одно устройство 12 управления и обработки данных. Как схематично показано в увеличенном виде на фиг.1, оно содержит, по меньшей мере, блок 14 индикации, блок 15 ввода и программирующий модуль 16. В программирующем модуле 16 заложены система 17 маршрутизации и навигационный модуль 18, которые будут описаны более подробно далее. Кроме того, комбайн 2 оснащен системой 19 рулевого управления, которая может управляться автоматически, так что комбайн 2 может двигаться по подлежащей обработке территории 5 с автоматическим направлением по предварительно определенным маршрутам 20. В простейшем случае это автоматическое вождение рабочей сельхозмашины может осуществляться за счет того, что в устройстве 12 управления и обработки данных заложены подлежащие обработке маршруты 20, причем их генерирование производится либо внешними средствами, либо в самом устройстве 12 управления и обработки данных. При внешнем генерировании внешние сигналы 21 маршрутов обычно передаются в устройство 12 управления и обработки данных способом дистанционной передачи данных. С учетом сигналов 10 положения комбайна 2, генерируемых и передаваемых от устройства 7 определения положения на основе GPS, в устройстве 12 управления и обработки данных генерируются так называемые сигналы 22 рулевого управления, передаваемые на систему 19 рулевого управления, так что рабочая сельхозмашина 1 может автоматически направляться по определенному маршруту 20 на территории 5, подлежащей обработке. В рамках изобретения возможен вариант осуществления, при котором сигналы 10 положения рабочей сельхозмашины 1 на подлежащей обработке территории 5 могут генерироваться оптоэлектронными устройствами 23, такими как лазерный сканер 24, определяющий кромку 25 обработки культуры. Как показано на фиг.2, подлежащая обработке территория 5 может иметь любые внешние контуры 26. При этом маршруты 20 движения рабочей сельхозмашины 1 в зависимости от рабочей ширины Х захвата машины должны выбираться таким образом, чтобы соседние маршруты 20 проходили на расстоянии друг от друга, примерно равном этой рабочей ширине Х захвата. Самый крайний наружный маршрут 20, показанный штрихпунктирными линиями, либо должен быть определен как начальный однократный объезд подлежащей обработке территории 5, либо может задаваться по внешним сигналам 21 маршрутов, которые непосредственно передаются на устройство 12 управления и обработки данных комбайна 2 в том случае, если раньше этот объезд уже был выполнен и соответствующий маршрут разработан. В зависимости от характеристики подлежащей обработке территории 5 и размера рабочей сельхозмашины 1 может оказаться необходимой обработка рабочей сельхозмашиной 1 нескольких маршрутов 20 движения, копирующих наружный контур территории 5. В этом случае, по меньшей мере, внутренние маршруты 20 могут обрабатываться автоматически. В соответствии с фиг.2 в зависимости от внешнего контура 26 подлежащей обработке территории 5 маршруты движения могут иметь самые различные геометрические формы и могут быть расположены самым различным образом. Именно здесь и вступает в действие изобретение. Оптимальная схема участков пути движения на подлежащей обработке территории 5 может быть структурирована, например, таким образом, что после прохода одного или нескольких маршрутов 20, копирующих внешний контур 26 территории 5, остаточная территория 28 может более эффективно объезжаться или обрабатываться участками 29 пути движения, проходящими другим образом. Для генерирования этих маршрутов 29 необходима вначале так называемая задающая линия 30, которая определяет ориентацию вновь генерируемых маршрутов 29 на территории 5. В соответствии со способом по изобретению эта задающая линия 30 генерируется путем того, что, в то время как рабочая сельхозмашина 1 автоматически направляется вдоль наружного маршрута 20, копирующего внешний контур 26 территории 5, оператор машины 1 посредством воздействия на клавишу 31 включения и клавишу 32 выключения может активизировать и вновь останавливать режим 33 записи в навигационном модуле 18. Во время активизации режима 33 записи контур маршрута 20, проходимого машиной 1 за этот промежуток времени, записывается как новая задающая линия 30 и закладывается в программирующий модуль 16. Воздействие на клавишу 31 включения и клавишу 32 выключения одновременно приводит к генерированию так называемых начальных точек 34 и конечных точек 35. Эти точки, по меньшей мере, записываются в память, а в предпочтительном примере осуществления изобретения также указываются блоком 14 индикации. В этом отношении возможен вариант выполнения, при котором блок 14 индикации содержит так называемый сенсорный монитор 36, на котором оператор 13 может выбрать начальную точку 34 и конечную точку 35 непосредственно на представленном маршруте 20 без необходимости активизации клавиш 31, 32. В рамках изобретения возможна также передача записанной в памяти задающей линии 30 в центральное вычислительное устройство 37. Преимущество решения заключается в том, что генерирование новых маршрутов 29, копирующих генерированную задающую линию 30, может производиться в центральном вычислительном устройстве 37. За счет этого устраняется необходимость установки на рабочей сельхозмашине 1 требуемых вычислительных мощностей, и расположенное на комбайне 2 устройство 12 управления и обработки данных может быть более дешевым. На фиг.3 представлена схема, поясняющая принцип генерирования маршрутов и требуемую для этого структуру программирующего модуля 16. В нижней части фиг.3 показаны подлежащая обработке территория 5, рабочая сельхозмашина 1 в виде зерноуборочного комбайна 2 и подлежащие обработке различно структурированные маршруты 20 движения. В верхней части фиг.3 в увеличенном виде показано устройство 12 управления и обработки данных со схематичным представлением процесса генерирования данных. Как уже было описано, устройство 12 управления и обработки данных содержит блок 14 индикации, блок 15 ввода и программирующий модуль 16. Далее, в программирующем модуле 16 содержатся, по меньшей мере, один модуль 17 системы маршрутизации и навигационный модуль 18 в соответствии с изобретением. В целях наглядности на фиг.3 показано резкое разграничение между навигационным модулем 18 и модулем 17 системы маршрутизации, однако в рамках изобретения они могут быть объединены в программирующем модуле 16. Согласно изобретению в навигационном модуле 18 заложены режимы 39-41 автоматического движения и, по меньшей мере, один режим 33 записи задающей линии 30. В показанном примере осуществления режимы 39-41 автоматического движения содержат: первый режим 39 автоматического движения «Движение по прямолинейному участку, ограниченному начальной точкой и конечной точкой»; второй режим 40 автоматического движения «Движение по контурному участку, ограниченному начальной точкой и конечной точкой»; дополнительный режим 41 автоматического движения «Движение по контуру без ограничения начальной точкой и конечной точкой». Само определение режимов 39-41 автоматического движения указывает на их структуру, а именно режимы 39 и 40 автоматического движения направляют сельхозмашину 1 по маршрутам, определяемым начальной точкой 43 и конечной точкой 44, причем маршрут 20 образован прямолинейным участком или криволинейным контурным участком. В противоположность этому в дополнительном режиме 41 автоматического движения вначале обеспечивается движение рабочей сельхозмашины 1 по первому наружному маршруту 20 движения, например, копирующему внешний контур 26 подлежащей обработке территории 5. При этом движение по этому крайнему наружному маршруту 20 управляется автоматически или оператором 13 в зависимости от того, имеются ли географические данные маршрута или нет. В представленном примере осуществления конкретный режим 39-41 автоматического движения может выбираться с помощью переключателей 45-47 предварительного выбора. Как уже было описано, может также активизироваться или останавливаться заложенный в навигационном модуле 18 режим 33 записи посредством, например, клавиш 31, 32 включения и выключения или посредством определения начальной и конечной точек 34, 35 задающей линии 30 на сенсорном мониторе 36. Использование сенсорного монитора 36 имеет дополнительное преимущество в том, что в этом случае выбор задающей линии 30 может производиться в любой момент времени, если на сенсорном мониторе 36 представлено множество уже обработанных и/или еще подлежащих обработке маршрутов 20, 29. В предпочтительном примере выполнения различные режимы 39-41 автоматического движения увязаны с режимом 33 записи таким образом, что, с одной стороны, запись задающей линии 30 может производиться в любом из имеющихся режимов 39-41 автоматического движения и, с другой стороны, она может производиться независимо от того, активизирован ли один из имеющихся режимов 39-41 автоматического движения. За счет этого создана возможность запуска режима 33 записи в ходе первого выполнения одного из режимов 39-41 автоматического движения и генерирования задающей линии 30, которая затем используется для разработки маршрутов 29 для другого режима 39-41 автоматического движения, отличного от того режима, во время которого была активизирована запись. Так, например, режим 33 записи может быть запущен, в то время как рабочая сельхозмашина 1 работает в режиме 41 «Движение по контуру без ограничения начальной точкой и конечной точкой», и обеспечивает запись задающей линии 30. Далее эта задающая линия 30 привлекается для генерирования маршрутов 29 для режима 39 «Движение по прямолинейному участку, ограниченному начальной точкой и конечной точкой». За счет того что во время движения вдоль контура начальная точка 34 и конечная точка 35 движения уже были определены описанным образом для записи задающей линии 30, режим 33 записи генерирует прямолинейный участок между этими двумя точками 34, 35 в качестве задающей линии 30. В представленном примере выполнения по фиг.3 рабочая сельхозмашина 1 эксплуатировалась бы, например, в третьем режиме 41 автоматического движения для обработки маршрута 20, определяющего внешний контур 26 подлежащей обработке территории 5. Однако в рамках изобретения возможна также работа машины 1 в одном из других режимов 39, 40 автоматического движения или переход с одного режима 39-41 на другой режим 39-41 автоматического движения. Как только зерноуборочный комбайн 2 доходит до нижнего прямолинейного участка, оператор 13 комбайна 2 активизирует клавишу 31 для определения начальной точки 34 записи. В конце этого прямолинейного участка оператор нажимает на клавишу 32 выключения, так что запись прерывается определением конечной точки 35. Участок пути между начальной и конечной точками 34, 35, образует задающую линию 30, которая в простейшем случае записывается в памяти устройства 12 управления и обработки данных и образует входную информацию 48 для системы 17 маршрутизации по изобретению. Система 17 маршрутизации содержит так называемый модуль 49 функции 50 рядов (Beetfunktion), в котором на основе созданной задающей линии 30 еще подлежащая обработке остаточная территория 28 заполняется маршрутами 29 и закладывается в так называемую функцию 50 рядов. Обработка теперь уже записанной в памяти функции 50 рядов может осуществляться либо путем целенаправленного вызова, либо путем того, что оператор 13 направляет рабочую сельхозмашину 1 в культуру 6 параллельно положению созданной задающей линии 30, а программирующий модуль 16 автоматически распознает, что теперь обработка следует по записанной функции 50 рядов. В рамках изобретения возможен вариант осуществления, при котором в программирующем модуле 16 может быть заложено множество функций 50 рядов и каждая функция 50 рядов содержит различно структурированные маршруты 20, 29. При этом различная структура маршрутов 20, 29 может охватывать как конфигурацию, например, в виде прямых и кривых линий, так и ее расположение на подлежащей обработке территории 5, то есть ориентацию относительно частей света (север-юг, восток-запад). Для специалиста в данной области понятно, что при осуществлении изобретения возможны различные изменения и модификации описанной системы 17 маршрутизации, не выходящие за пределы объема защиты, а также использование ее в других машинах для получения описанных преимуществ. Формула изобретения1. Система маршрутизации для рабочих сельхозмашин, причем для генерирования маршрутов движения на территории за рабочей сельхозмашиной закрепляется определенная рабочая ширина захвата, а генерирование маршрутов производится в навигационном модуле, отличающаяся тем, что навигационный модуль (18) содержит один или несколько режимов (39-41) автоматического движения и, по меньшей мере, один режим (33) записи, при этом режим или режимы (39-41) автоматического движения и, по меньшей мере, один режим (33) записи могут быть активизированы независимо друг от друга. 2. Система маршрутизации по п.1, отличающаяся тем, что в одном режиме (39-41) автоматического движения производится запись определенного участка (20) пути, и этот определенный участок (20) пути образует задающую линию (30) одного или нескольких участков (29) пути, подлежащих последующей обработке. 3. Система маршрутизации по п.2, отличающаяся тем, что определяемые задающей линией (30) участки (29) пути, подлежащие последующей обработке, в модуле (49) функции рядов сводятся воедино в качестве функции (50) рядов. 4. Система маршрутизации по любому из пп.1-3, отличающаяся тем, что определение участков (20, 30) пути производится путем выбора начальной точки (34) и конечной точки (35), ограничивающих определяемый участок (20, 30) пути. 5. Система маршрутизации по п.4, отличающаяся тем, что начальную точку (34) и конечную точку (35) выбирают посредством генерирования сигналов (31, 32) включения и выключения в устройстве (12) управления и обработки данных. 6. Система маршрутизации по п.5, отличающаяся тем, что устройство (12) управления и обработки данных содержит блок (14) индикации, выполненный в виде сенсорного монитора (36), а начальную точку (34) и конечную точку (35) определяют посредством выбора на сенсорном мониторе (36). 7. Система маршрутизации по п.2, отличающаяся тем, что функция (50) рядов включает в себя разделение подлежащей обработке территории (5, 28) на множество участков (20, 29) пути. 8. Система маршрутизации по любому из пп.1-3, отличающаяся тем, что режимы (39-41) автоматического движения содержат движение по прямолинейному участку, ограниченному начальной точкой (43) и конечной точкой (44), движение по контурному участку, ограниченному начальной точкой (43) и конечной точкой (44), и движение по контуру без ограничения начальной точкой и конечной точкой или комбинацию, по меньшей мере, из двух этих режимов (39-41) автоматического движения. 9. Система маршрутизации по любому из пп.1-3, отличающаяся тем, что соответствующий режим (39-41) автоматического движения может быть выбран свободно, при этом предусмотрена возможность переключения между этими режимами (39-41) автоматического движения. 10. Система маршрутизации по любому из пп.1-3, отличающаяся тем, что в одном режиме (39-41) автоматического движения производится запись определенного участка (20) пути, и этот определенный участок (20) пути образует задающую линию (30) для функции (50) рядов другого режима (39-41) автоматического движения. Популярные патенты: 2051575 Способ отделения дождевых червей от среды обитания и устройство для его осуществления ... микропереключателем 32. Микропереключатель 32 замыкает электрическую цепь, питающую электрический двигатель 21, и замыкает первую электрическую цепь, питающую электрический двигатель 12. При этом электрический двигатель 21 прекращает перемещать ящик 27, а электрический двигатель 12 вращает ролики 11. Ролики 11, вращаясь, перемещают по направляющим 10 раму 9. Как только рама 9 переместится до надлежащей точки, зацеп 13 контактирует с микропереключателем 15. Микропереключатель 15 размыкает электрическую цепь, питающую электрический двигатель 12, и соленоидный зацеп 24 замыкает электрическую цепь, питающую электрический двигатель 21. Электрический двигатель 21 вращает звездочку 19. ... 2387128 Система сбора отходов для отделения жидких отходов от твердых отходов ... под отверстиями для выгрузки отходов животноводства, причем конвейер для отходов животноводства содержит верхний ролик конвейера, нижний ролик конвейера и бесконечную конвейерную ленту, проходящую вокруг верхнего и нижнего роликов конвейера; конвейерная лента имеет вогнутую верхнюю ветвь, а верхняя ветвь имеет в поперечном сечении самый нижний участок и боковые участки, отходящие вбок и вверх от самого нижнего участка, боковые участки верхней ветви конвейерной ленты каждый имеет уклон в поперечном направлении верхней ветви величиной от 2,0 до 6,0%, верхняя ветвь наклонена в продольном направлении от верхнего ролика конвейера к нижнему ролику конвейера, причем верхняя ветвь ... 2421965 Способ возделывания зерновых колосовых культур ... является использование в качестве действующего вещества Фитолавина 300, являющегося антибиотиком, применение которого уничтожает не только патогенные микроорганизмы, но и полезную микрофлору, тем самым нарушая экологию.Техническим результатом предлагаемого способа является повышение урожайности зерновых колосовых культур за счет нейтрализации воздействия фитопатогенных бактерий Pseudomonas syringae посредством восполнения недостатка метионина обработкой семян перед посевом и обработкой растений в фазу весеннего кущения препаратом Метионин, который является аминокислотой. Технический результат достигается тем, что в известном способе, включающем однократную обработку семян ... 2159526 Устройство для навешивания сельскохозяйственных орудий на трактор ... Отклонение шатунной кривой от прямой линии по сравнению с первым исполнением будет тем меньше, чем ближе расположены шарниры 12 и 13. Так как при поперечных перемещениях звеньев устройства происходит сближение или удаление трактора 2 от орудия 1, а длина верхней тяги 10 остается неизменной, то важно, чтобы это не привело к недопустимому изменению положения орудия 1 в вертикально-продольной плоскости и нарушению глубины обработки почвы (данное требование связано с тем, что с целью снижения металлоемкости передний шарнир 11 верхней тяги 10 и механизм 9 подъема в отличие от прототипа установлены на тракторе 2). Механизм устройства должен отвечать обоим требованиям: обеспечить движение ... 2435369 Гербицидные композиции ... жирных кислот с включением лауриновой, миристиновой, пентадекановой, пальмитиновой, маргариновой, стеариновой, миристолеиновой, пальмитолеиновой, олеиновой, линолевой и линоленовой кислот. Например, может применяться метилолеоилтаурат натрия, CAS 137-20-2. Массовое отношение таурата к клохинтоцет-мексилу составляет от примерно 1:100 до примерно 1:0,001. В другом варианте осуществления массовое отношение таурата к клохинтоцет-мексилу составляет от примерно 1:10 до примерно 1:0,1. Любой подходящий лигносульфат может применяться. Подходящие лигнинсульфонаты должны быть нейтрализованы щелочным металлом и содержат от примерно 0,7 до примерно 3,3 сульфированных молей на кг с ... |
Еще из этого раздела: 2451442 Способ обогащения селеном овощей и злаков 2141182 Культиватор 2459398 Способ рекультивации почв, загрязненных минерализованными водами 2460269 Малогабаритный картофелеуборочный комбайн 2400960 Ориентирующее устройство для корнеплодов конической формы 2228588 Копатель корнеклубнеплодов 2475020 Способ подбора лучших сортов опылителей для насаждений яблони 2112341 Лапа плоскорежущая 2444885 Посевной агрегат 2076583 Способ выращивания растений в теплице и устройство для его осуществления |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||
 4342171 описано, как в процессе обработки почвы производится запись участков пути, пройденных на обрабатываемой территории почвообрабатывающей машиной, с привлечением данных положения системы GPS (Global Positioning System - глобальная система навигации и определения местоположения). Определенные таким образом данные участков пути рабочей сельхозмашины далее, в зависимости от исполнения устройства обработки данных на этой сельхозмашине или в центральном вычислительном устройстве, преобразуются в данные маршрутов, которые могут либо указываться в режиме реального времени, либо записываться в память с возможностью вызова. Основной недостаток таких систем заключается в том, что транспортное средство вначале должно выполнить обработку с движением по определенному маршруту перед тем, как этот маршрут становится доступным для вызова в запоминающем устройстве и может быть при необходимости использован в качестве базового набора данных для генерирования будущих маршрутов движения машины при обработке.
4342171 описано, как в процессе обработки почвы производится запись участков пути, пройденных на обрабатываемой территории почвообрабатывающей машиной, с привлечением данных положения системы GPS (Global Positioning System - глобальная система навигации и определения местоположения). Определенные таким образом данные участков пути рабочей сельхозмашины далее, в зависимости от исполнения устройства обработки данных на этой сельхозмашине или в центральном вычислительном устройстве, преобразуются в данные маршрутов, которые могут либо указываться в режиме реального времени, либо записываться в память с возможностью вызова. Основной недостаток таких систем заключается в том, что транспортное средство вначале должно выполнить обработку с движением по определенному маршруту перед тем, как этот маршрут становится доступным для вызова в запоминающем устройстве и может быть при необходимости использован в качестве базового набора данных для генерирования будущих маршрутов движения машины при обработке.