Способ и устройство для управления сельскохозяйственной машинойПатент на изобретение №: 2384988 Автор: БРУННЕРТ Андреас (DE) Патентообладатель: КЛААС Зельбстфаренде Эрнтемашинен ГмбХ (DE) Дата публикации: 27 Декабря, 2006 Начало действия патента: 23 Июня, 2005 Адрес для переписки: 191186, Санкт-Петербург, а/я 230, "АРС-ПАТЕНТ", пат.пов. В.М.Рыбакову, рег. 90 Изображения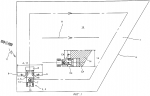 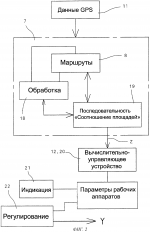  Изобретение относится к способу и устройству для управления сельскохозяйственной машиной. С сельскохозяйственной машиной связана система маршрутизации для разработки маршрутов на территории. Система маршрутизации подразделяет территорию, по меньшей мере, на обработанную территорию и, по меньшей мере, на территорию оставшейся площади. Последовательность «соотношение площадей» определяют из разработанных маршрутов и состояния их обработки с привлечением ширины обработки сельскохозяйственной машины, конфигурации обработанной территории, а также конфигурации территории оставшейся площади. Эти данные передают в виде выходных сигналов в вычислительно-управляющее устройство, которое вырабатывает для сельскохозяйственной машины или установленного на ней рабочего аппарата подлежащей изменению, по меньшей мере, один параметр. С сельскохозяйственной машиной связана система маршрутизации для разработки маршрутов на территории, и эта система маршрутизации подразделяет территорию, по меньшей мере, на обработанную территорию и, по меньшей мере, на территорию оставшейся площади. Система маршрутизации находится во взаимодействии, по меньшей мере, с одним вычислительно-управляющим устройством. Это вычислительно-управляющее устройство выполнено с возможностью генерирования управляющих сигналов (Y) для регулирования, по меньшей мере, одного параметра сельскохозяйственной машины в зависимости от разработанных маршрутов. Этот, по меньшей мере, один параметр сельскохозяйственной машины вырабатывается в зависимости от конфигурации обработанной территории и/или территории оставшейся площади. Уменьшается время на обработку и уменьшается повреждение растений. 2 н. и 10 з.п. ф-лы. 3 ил. Область техники, к которой относится изобретение Настоящее изобретение относится к способу и устройству для управления сельскохозяйственной машиной в соответствии с ограничительной частью пунктов 1 и 11 формулы изобретения. Уровень техники Из патентного документа ЕР 0660660 известно оснащение сельскохозяйственных машин устройствами так называемой системы GPS (Global Positioning System - глобальной системы навигации и определения местоположения) для регистрации положения сельскохозяйственных уборочных машин на площади, подлежащей обработке. При этом маршрут движения определяется оператором машины, а с помощью системы GPS, связанной с записывающим устройством, регистрируются данные положения машины, которые затем в записывающем устройстве привлекаются для электронного построения изображения пройденного маршрута. Такие системы являются первым шагом в направлении регистрации маршрутов, однако здесь производится только запись маршрута как такового. Системы этого типа не позволяют выполнять предварительное планирование маршрутов движения машины при обработке. В развитие идеи регистрации маршрутов системы по патентному документу ЕР 0821296 создают возможность генерирования (разработки) маршрутов в зависимости от внешней геометрии подлежащих обработке площадей. Существенное преимущество этих систем состоит в том, что они впервые позволяют вначале разрабатывать маршруты с учетом различных критериев оптимизации, а затем в простейшем случае производить обработку сельскохозяйственными машинами с их автоматическим следованием по этим маршрутам. Поскольку в данном случае участки пути разрабатываются на основе простых геометрических зависимостей, такие системы способны только подразделять подлежащую обработке территорию на участки пути в зависимости от ширины обработки сельскохозяйственной машины. Поскольку ширина подлежащей обработке территории, как правило, не является величиной, кратной ширине обработки сельскохозяйственной машины, система маршрутизации разрабатывает также участки пути, на которых используется только часть ширины обработки машины. В неблагоприятном случае может создаваться ситуация, когда расчетные крайние участки пути могут обрабатываться только с большими затратами времени путем осуществления оператором машины сложных маневров рулевого управления. При этом в ходе работ по распределению материалов, таких как удобрения или средства защиты растений, на отдельных участках обрабатываемой территории эти материалы могут наноситься несколько раз. Это не только повышает расходы на излишнее нанесение материалов, но в неблагоприятных случаях может приводить к повреждению растительности. Сущность изобретения Задача, на решение которой направлено настоящее изобретение, заключается в создании системы маршрутизации, которая позволяет устранить недостатки известных решений и обеспечивает экономичную эксплуатацию сельскохозяйственной машины на подлежащей обработке территории. В соответствии с изобретением решение поставленной задачи достигается в способе управления сельскохозяйственной машиной, когда с сельскохозяйственной машиной связана система маршрутизации для разработки маршрутов на территории и эта система маршрутизации подразделяет территорию по меньшей мере на обработанную территорию и по меньшей мере на территорию оставшейся площади. Согласно изобретению по меньшей мере один параметр сельскохозяйственной машины регулируют в зависимости от конфигурации обработанной территории и/или территории оставшейся площади. За счет того, что по меньшей мере один параметр сельскохозяйственной машины регулируют в зависимости от конфигурации обработанной территории и/или территории оставшейся площади, обеспечивается возможность приспособления режима работы сельскохозяйственной машины или ее рабочих аппаратов к конфигурации соответствующей территории в аспекте экономичной эксплуатации сельскохозяйственной машины. В предпочтительном примере осуществления изобретения сельскохозяйственная машина образована по меньшей мере одним несущим транспортным средством с установленными на нем рабочими аппаратами, а параметры, регулируемые в зависимости от конфигурации подлежащей обработке территории могут быть как параметрами несущего транспортного средства, так и параметрами рабочих аппаратов. За счет этого достигается высокая гибкость при оптимизации рабочего процесса, так как в зависимости от типа сельскохозяйственной машины либо ее отдельные рабочие аппараты могут быть переведены из рабочего в нерабочее положение, либо не требующиеся рабочие аппараты могут быть отключены, но не развернуты. В простейшем случае изменяемый параметр может охватывать адаптирование сельскохозяйственной машины или установленных на ней рабочих аппаратов в зависимости от конфигурации обработанной территории и/или территории оставшейся площади. При этом адаптирование может касаться либо косой установки сельскохозяйственной машины и/или ее рабочих аппаратов, либо установки частичной ширины обработки. Особенное преимущество решения заключается в том, что, с одной стороны, лучше используется ширина обработки сельскохозяйственной машины, и, с другой стороны, устраняется риск неоднократной обработки одной и той же территории. Наиболее простым конструктивным путем установку частичной ширины обработки осуществляют посредством включения и отключения отдельных рабочих аппаратов. Как правило, после эксплуатации сельскохозяйственной машины на подлежащей обработке территории ее переводят на новую территорию, при этом переезд обычно производится с более высокой скоростью движения, чем при рабочем ходе во время обработки территории. То же самое относится к переезду от одного обработанного маршрута к следующему маршруту, подлежащему обработке. В предпочтительном примере осуществления в данном случае скорость движения сельскохозяйственной машины изменяют сразу же после того, как величина территории оставшейся площади становится равной нулю. В простейшем случае окончание обработки производится в ходе одного единственного маршрута, который заканчивается при достижении этой нулевой величины. В следующем предпочтительном примере осуществления параметр, изменяемый в зависимости от обработанной территории или территории оставшейся площади, может охватывать активизацию предварительно определенного рабочего процесса. Преимущество решения заключается в том, что в определенных местах территории, например, в конце маршрута, автоматически запускается повторяющийся рабочий процесс. В частности, такие предварительно определенные рабочие процессы могут представлять собой процессы управления обработкой на краю поля; при этом в простейшем случае конфигурация территории оставшейся площади может быть также определена таким образом, что она образована оставшейся частью подлежащего обработке маршрута. Часто активизация рабочих аппаратов, такая как установка (регулирование положения) передающих перегрузочных устройств, в значительной мере зависит от конфигурации обработанной территории или территории оставшейся площади в том отношении, что, например, из-за ограниченного пространства перегрузочное транспортное средство может быть установлено на территории только в определенных местах. В дальнейшем примере осуществления изменяемый параметр может охватывать правостороннюю и левостороннюю установку рабочих аппаратов, что позволяет значительно снизить количество манипуляций оператора, необходимых для выполнения процесса перегрузки. За счет знания конфигурации территории оставшейся площади для сельскохозяйственной машины в распоряжении имеются также качественные данные относительно потребности в мощности. В предпочтительном примере осуществления эти данные могут использоваться также для того, чтобы число оборотов двигателя сельскохозяйственной машины и/или числа оборотов самых различных приводов сельскохозяйственной машины или установленных на ней рабочих аппаратов могло регулироваться в соответствии с требуемыми затратами мощности. В особенности простое конструктивное осуществление способа по изобретению обеспечивается в том случае, когда с системой маршрутизации связано по меньшей мере одно вычислительно-управляющее устройство, которое в зависимости от разработанных маршрутов генерирует управляющие сигналы для регулирования по меньшей мере одного параметра сельскохозяйственной машины, а этот по меньшей мере один параметр сельскохозяйственной машины вырабатывается в зависимости от конфигурации обработанной территории и/или территории оставшейся площади. Дальнейшая разгрузка оператора сельскохозяйственной машины достигается за счет того, что вычислительно-управляющее устройство автоматически производит регулирование выработанных параметров в сельскохозяйственной машине. Для того чтобы дать оператору возможность воздействия на регулирование выработанных параметров, в дальнейшем примере осуществления предусмотрено, что выработанные параметры могут быть визуально указаны оператору посредством индикаторного устройства. Задача изобретения решена также в устройстве для управления сельскохозяйственной машиной, причем с сельскохозяйственной машиной связана система маршрутизации для разработки маршрутов на территории и эта система маршрутизации подразделяет территорию по меньшей мере на обработанную территорию и по меньшей мере на территорию оставшейся площади. Согласно изобретению система маршрутизации находится во взаимодействии по меньшей мере с одним вычислительно-управляющим устройством, причем это вычислительно-управляющее устройство выполнено с возможностью генерирования управляющих сигналов для регулирования по меньшей мере одного параметра сельскохозяйственной машины в зависимости от разработанных маршрутов. Указанный по меньшей мере один параметр сельскохозяйственной машины вырабатывается в зависимости от конфигурации обработанной территории и/или территории оставшейся площади. В предпочтительном варианте осуществления вычислительно-управляющее устройство выполнено с возможностью автоматически производить регулирование выработанных параметров и с возможностью визуальной индикации выработанных параметров посредством индикаторного устройства. Перечень фигур Далее со ссылками на прилагаемые чертежи будут подробно описаны примеры осуществления изобретения. На чертежах: фиг.1 изображает схему, иллюстрирующую способ в соответствии с изобретением, фиг.2 изображает блок-схему способа в соответствии с изобретением, фиг.3 изображает схему, иллюстрирующую различные примеры использования способа по изобретению. Сведения, подтверждающие возможность осуществления изобретения На фиг.1 схематично показана территория 1, подлежащая проходу и обработке сельскохозяйственной машиной 2, которая в данном примере выполнения представлена в виде самоходной косилки 3. Самоходная косилка 3 образована несущим транспортным средством 4, - в простейшем случае трактором 5, - с установленными на нем спереди и по бокам рабочими органами 6, в данном примере в виде косилочных аппаратов. Кроме того, сельскохозяйственная машина 2 оснащена системой 7 маршрутизации, которая сама по себе известна и способна подразделять подлежащую обработке территорию 1 на так называемые маршруты 8 обработки. Разработка этих маршрутов 8 обработки достигается, как правило, за счет того, что сельскохозяйственная машина 2 вначале объезжает подлежащую обработке территорию 1 в ходе первого рабочего прохода, следуя вдоль внешнего контура 9. Затем система 7 маршрутизации в зависимости от ширины А обработки разрабатывает дальнейшие маршруты 8, так что обеспечивается полное перекрытие территории 1 маршрутами 8 обработки, зависящими от ширины А обработки. В целях лучшей повторяемости такие системы 7 маршрутизации, как правило, базируются на системе GPS, при этом сельскохозяйственная машина 2 снабжена GPS-приемником 10, который передает спутниковые сигналы 11 положения на вычислительное устройство 12, связанное с системой 7 маршрутизации. Кроме того, система 7 маршрутизации имеет такую структуру, что в зависимости от маршрутов 8 обработки подлежащая обработке территория 1 разделяется на уже обработанную территорию 13 и территорию 14 оставшейся площади, подлежащую обработке. Известным образом обработанная территория 13 и территория 14 оставшейся площади могут визуально представляться на индикаторном устройстве 16, находящемся в области обзора оператора 15. В рамках изобретения возможен вариант, когда территория 14 оставшейся площади привязана к единственному маршруту, так что в пределах подлежащей обработке территории 1 могут быть оставаться несколько территорий 14 оставшейся площади. Как показано на фиг.1 в средней части, при обработке сельскохозяйственной машиной 2 разработанных маршрутов 8 обработки может оказаться, что, например, последний маршрут 8 обработки имеет поперечную протяженность меньше ширины А обработки машины 2. Настоящим изобретением предусмотрено, что теперь по меньшей мере один параметр 17, в данном случае ширина А обработки, может регулироваться или адаптироваться в соответствии с конфигурацией обработанной территории 13 или, что аналогично, с конфигурацией территории 14 оставшейся площади. Для простоты на фиг.1 конфигурация территории 14 оставшейся площади выбрана такой, что ширина этой территории 14 соответствует примерно двум величинам единичной ширины ЕА обработки одного косилочного рабочего аппарата 6, установленного на несущем транспортном средстве 4. Соответственно, как это будет более подробно описано дальше, с привлечением системы 7 маршрутизации в способе предусмотрено, что рабочие аппараты 6 сельскохозяйственной машины 2 активизируются только на частичной ширине ТА обработки. Применительно к косилочным аппаратам 6 на фиг.1 это означает, что сельскохозяйственная машина 2 потребляет меньше энергии и обладает улучшенной маневренностью, когда излишний косилочный аппарат 6а переводится из рабочего в нерабочее положение. Фиг.2 изображает блок-схему, иллюстрирующую основные этапы способа. Как уже было описано, вначале система 7 маршрутизации известным образом разрабатывает, по меньшей мере, с привлечением данных 11 положения на основе системы GPS, множество маршрутов 8 обработки, которые регистрируются и записываются в память системы 7 маршрутизации на этапе 18 выполнения программы. Кроме того, разработанные и сохраненные маршруты 8 и состояние их обработки увязываются друг с другом посредством последовательности 19 Как показано на фиг.3, сельскохозяйственная машина 2 может представлять собой машину 23 для распределения материалов, такую как разбрасыватель удобрений, машину для опрыскивания гербицидами или сеялку. При этом эксплуатация машины с частичной шириной ТА обработки может производиться либо только отключением рабочего аппарата 6, либо путем его отключения и перевода в нерабочее положение. В следующем примере осуществления параметр 17, подлежащий изменению в зависимости от конфигурации территории 14 оставшейся площади, может содержать также скорость v движения. Это имеет особенное преимущество в тех случаях, когда сельскохозяйственная машина 2 совершает вспомогательные переезды между последовательными маршрутами 8 обработки или после полной обработки одной территории 1 переезжает на следующую территорию. В обоих случаях сельскохозяйственная машина 2 обычно приводится с более высокой скоростью v движения, чем при рабочем ходе. Далее, подлежащий изменению параметр 17 может охватывать активизацию предварительно определенной и заложенной в вычислительно-управляющем устройстве 20 рабочих процессов, таких как, например так называемое, В зависимости от ширины А обработки сельскохозяйственной машины 2 потребление мощности возрастает или снижается. В том случае, когда система 7 маршрутизации знает конфигурацию территории 14 оставшейся площади, вычислительно-управляющее устройство 20 может быть дополнительно выполнено таким образом, что генерируемые управляющие сигналы Y по фиг.2 могут воздействовать на число 30 оборотов двигателя 31 сельскохозяйственной машины 2 или на числа 32 оборотов самых различных рабочих аппаратов 6. Преимуществом в данном случае является возможность экономии топлива за счет снижения числа оборотов при работе с частичной шириной ТА обработки. Для специалиста в данной области понятно, что при осуществлении изобретения возможны различные изменения и модификации способа и устройства, не выходящие за пределы объема защиты, а также использование их в других системах машин. Формула изобретения1. Способ управления сельскохозяйственной машиной, с которой связана система маршрутизации для разработки маршрутов на территории, причем система маршрутизации подразделяет территорию, по меньшей мере, на обработанную территорию и, по меньшей мере, на территорию оставшейся площади, отличающийся тем, что последовательность «соотношение площадей», определяют из разработанных маршрутов и состояния их обработки, с привлечением ширины обработки сельскохозяйственной машины, конфигурации обработанной территории, а также конфигурации территории оставшейся площади, и эти данные передают в виде выходных сигналов в вычислительно-управляющее устройство, которое вырабатывает для сельскохозяйственной машины или установленного на ней рабочего аппарата подлежащей изменению, по меньшей мере, один параметр. 2. Способ по п.1, отличающийся тем, что сельскохозяйственная машина (2) образована, по меньшей мере, одним несущим транспортным средством (4, 5) и одним или несколькими рабочими аппаратами (6), установленными на несущем транспортном средстве (4, 5), а, по меньшей мере, один параметр (17) относится к несущему транспортному средству (4, 5) и/или к рабочим аппаратам (6), установленным на нем или на них. 3. Способ по п.2, отличающийся тем, что параметр (17) охватывает установку частичной ширины (ТА) обработки. 4. Способ по п.3, отличающийся тем, что на частичную ширину (ТА) обработки воздействуют посредством включения и отключения рабочих аппаратов (6). 5. Способ по одному из пп.1-4, отличающийся тем, что параметр (17) охватывает изменение скорости (v) движения сельскохозяйственной машины (2). 6. Способ по одному из пп.1-4, отличающийся тем, что параметр (17) охватывает активизацию предварительно определенного рабочего процесса. 7. Способ по п.6, отличающийся тем, что предварительно определенный рабочий процесс представляет собой процесс обработки на краю поля. 8. Способ по одному из пп.2-4, отличающийся тем, что параметр (17) охватывает правостороннюю и левостороннюю активизацию рабочих аппаратов. 9. Способ по одному из пп.1-4, отличающийся тем, что сельскохозяйственная машина (2) оснащена, по меньшей мере, одним двигателем и множеством приводов, а, по меньшей мере, один параметр (17) охватывает изменение числа оборотов двигателя и/или изменение числа оборотов приводов. 10. Устройство для управления сельскохозяйственной машиной, причем с сельскохозяйственной машиной связана система маршрутизации для разработки маршрутов на территории и эта система маршрутизации подразделяет территорию, по меньшей мере, на обработанную территорию и по меньшей мере на территорию оставшейся площади, отличающееся тем, что система маршрутизации (7) находится во взаимодействии по меньшей мере с одним вычислительно-управляющим устройством (12, 20), причем это вычислительно-управляющее устройство (12, 20) выполнено с возможностью генерирования управляющих сигналов (Y) для регулирования, по меньшей мере, одного параметра (17) сельскохозяйственной машины (2) в зависимости от разработанных маршрутов (8), а этот, по меньшей мере, один параметр (17) сельскохозяйственной машины (2) вырабатывается в зависимости от конфигурации обработанной территории (13) и/или территории (14) оставшейся площади. 11. Устройство по п.10, отличающееся тем, что вычислительно-управляющее устройство (12, 20) выполнено с возможностью автоматически производить регулирование выработанных параметров (17). 12. Устройство по п.11, отличающееся тем, что оно выполнено с возможностью визуальной индикации выработанных параметров (17) посредством индикаторного устройства (16). Популярные патенты: 2132610 Устройство обогрева сельскохозяйственных животных и птицы ... животных и птицы с помощью ИК-излучателей. На фиг.2 представлена зависимость тепловыделений цыпленка в первый период его роста. На фиг.3 представлена зависимость радиационного потока теплоты в первый период роста цыпленка. На фиг.4 представлена температура цыпленка в первые 10 дней его роста. На фиг. 5 представлена зависимость конвективного потока теплоты от температуры воздуха. Устройство содержит (фиг.1): блок 1, включающий в себя датчик температуры 5 и блок преобразователь 6, блок сравнения 7, исполнительный механизм 8 и нагреватель 9, таймер-программатор 10 и задатчики температуры цыпленка 11 и теплопродукции 12, исполнительный механизм 13 и вентиль 14; систему ... 2298909 Устройство для сбора семян ... ее боковин и делителей. Кроме этого снижается травмирование семян в процессе сбора урожая. Установка расстояния между смежными делителями травостоя меньше минимального размера обмолачивающих элементов обеспечивает размещение обмолачивающих элементов в зоне обмолота травостоя предлагаемым устройством. Причем совместно с выполнением делителей травостоя из изогнутых стержней и их применением обеспечивается функция крепления обмолачивающих элементов.На фиг.1 схематично изображено заявляемое устройство для сбора семян, вид сбоку; на фиг.2 - то же в разрезе по А-А на фиг.1; на фиг.3 - то же в разрезе по Б-Б на фиг.2.Устройство для сбора семян содержит приемную камеру 1 с боковинами ... 2189708 Машина для формирования гребней ... на возделывании сельскохозяйственных культур, в частности картофеля в зонах с недостаточным или избыточным увлажнением, и может найти широкое применение в области сельскохозяйственного машиностроения при изготовлении почвообрабатывающих машин и орудий. Применение изобретения позволяет повысить качество формирования гребней и улучшить качество щелевания почвы. Источники информации 1. SU N 242536, 25.04.1969. 2. Патент RU N 2004948, 1993. 3. SU N 139489, 1961. Формула изобретения Машина для формирования гребней, включающая секции фрез, в передней части которых установлен щелерез, и закрывающий их кожух-гребнеобразователь, отличающаяся тем, что кожух-гребнеобразователь выполнен ... 2259707 Способ озеленения территорий многолетними декоративными древесными растениями ... декоративными древесными растениями, у которых декоративность и устойчивость к неблагоприятным климатическим и техногенным факторам, характерным для этой территории, наиболее соответствуют условиям текущего периода года, а удаленные контейнеры с выращиваемыми в них многолетними декоративными древесными растениями помещают в хранилище, где для каждой породы древесных растений поддерживают оптимальные для произрастания условия, причем влажность почвы в переносном контейнере перед его размещением на озеленяемой территории доводят до оптимальной для выращиваемой в нем породы древесных растений с учетом текущего периода года величины, а при достижении многолетними декоративными ... 2384065 Инсектоакарицидное средство ... действующих веществ композицию из фипронила и альфациперметрина при их концентрации в мас.% в общем составе средства: фипронил0,01-10,0 альфациперметрин 0,01-10,0 при соотношении массовых долей 1 части фипронила к 0,1-20 частям альфациперметрина.2. Средство по п.1, отличающееся тем, что представляет собой готовую форму в виде капель для топикального применения и содержит фипронил в концентрации 2,5-10 мас.% и альфациперметрин в концентрации 0,25-2,5 мас.%.3. Средство по п.1, отличающееся тем, что представляет собой готовую форму в виде лосьона, раствора или спрея для нанесения на шерсть, кожу, оперение птиц и содержит фипронил в концентрации 0,05-1,0 мас.% и ... |
Еще из этого раздела: 2115638 Способ переработки органических отходов животного происхождения в кормовой белок и биогумус 2257713 Способ производства пестицида (варианты) 2112361 Контроллер программируемого управления поливом 2067798 Агромостовой комплекс 2093016 Устройство для водоподачи 2399203 Способ оценки физиологического состояния организма цыплят 2295848 Способ дезинсекции и дезинфекции материалов зернового происхождения и устройство для его осуществления 2278503 Способ управления формированием качества виноградного вина 2199860 Способ увеличения устойчивости подсолнечника к действию гербицида 2452157 Рыхлитель-щелерез |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||
 соотношение площадей
соотношение площадей . Последовательность 19
. Последовательность 19