Система маршрутизации для сельскохозяйственных машинПатент на изобретение №: 2384987 Автор: ДИКХАНС Норберт (DE), ХУСТЕР Йохен (DE), БРУННЕРТ Андреас (DE) Патентообладатель: КЛААС Зельбстфаренде Эрнтемашинен ГмбХ (DE) Дата публикации: 20 Ноября, 2006 Начало действия патента: 31 Мая, 2005 Адрес для переписки: 191186, Санкт-Петербург, а/я 230, "АРС-ПАТЕНТ", пат.пов. В.М.Рыбакову, рег. 90 Изображения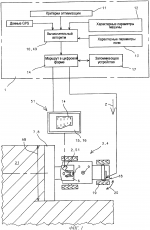 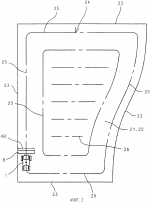 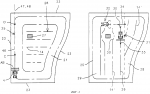 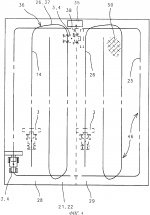 Система, характеризующаяся тем, что для разработки маршрутов движения по территории сельскохозяйственной машине присвоена определенная ширина обработки. Система маршрутизации выполнена с возможностью динамической адаптации запланированного маршрута. Маршрут образован из множества участков пути. Участки пути разрабатываются по критериям оптимизации. Критериями оптимизации являются «кратчайший участок пути/время обработки» и/или «низкая доля непродуктивного вспомогательного времени», и/или «короткие вспомогательные проходы между последовательными подлежащими обработке участками пути», и/или «опознавание и обработка уже известных маршрутов и последовательности процесса обработки», «короткие проходы на краю поля» и/или «минимизация проходов между сельскохозяйственной машиной и перегрузочным транспортным средством». Система маршрутизации выполнена с возможностью выработки стратегии обработки. Стратегия обработки содержит координирование параллельных участков пути и дуг поворота и/или учет числа положений других сельскохозяйственных машин, находящихся на подлежащей обработке территории, и/или учет кинематики машины, геометрии подлежащей обработке территории препятствий на подлежащей обработке территории, и/или учет характеристики убираемой массы, и/или учет характеристик убираемой массы, и/или учет желаний пользователя и предварительно заданного процесса обработки. Обеспечивается возможность гибко реагировать на изменяющиеся внешние условия. 2 н. и 18 з.п. ф-лы, 5 ил. Область техники, к которой относится изобретение Настоящее изобретение относится к системе маршрутизации для сельскохозяйственных машин в соответствии с ограничительной частью пунктов 1 и 9 формулы изобретения. Уровень техники Из патентного документа ЕР 0660660 известно оснащение сельскохозяйственных машин устройствами так называемой системы GPS (Global Positioning System - глобальной системы навигации и определения местоположения) для регистрации положения сельскохозяйственных уборочных машин на площади, подлежащей обработке. При этом маршрут движения определяется оператором машины, а с помощью системы GPS, связанной с записывающим устройством, регистрируются данные положения машины, которые затем в записывающем устройстве привлекаются для электронного построения изображения пройденного маршрута. Такие системы являются первым шагом в направлении регистрации маршрутов, однако здесь производится только запись маршрута как такового. Системы этого типа не позволяют выполнять предварительное планирование маршрутов движения машины при обработке. В развитие идеи регистрации маршрутов, системы по патентному документу ЕР 0821296 создают возможность генерирования (разработки) маршрутов в зависимости от внешней геометрии подлежащих обработке площадей. Существенное преимущество этих систем состоит в том, что они впервые позволяют вначале разрабатывать маршруты с учетом различных критериев оптимизации, а затем в простейшем случае производить обработку сельскохозяйственными машинами с их автоматическим следованием по этим маршрутам. Поскольку в данном случае участки пути разрабатываются на основе простых геометрических зависимостей, такие системы способны обрабатывать только однократно предварительно определенный маршрут, при этом отклонения от этого маршрута или показываются, или могут непосредственно корректироваться. Раскрытие изобретения Соответственно, задача, на решение которой направлено настоящее изобретение, заключается в создании системы маршрутизации, способной гибко реагировать на изменяющиеся внешние условия. В соответствии с изобретением решение поставленной задачи достигается за счет отличительных признаков, изложенных в пунктах 1 или 9 формулы изобретения. Предложена система маршрутизации для сельскохозяйственных машин, в которой для разработки маршрутов движения по территории сельскохозяйственной машине присвоена определенная ширина обработки, отличающаяся тем, что система маршрутизации выполнена с возможностью динамической адаптации запланированного маршрута. За счет того, что система маршрутизации допускает динамическую адаптацию запланированного маршрута, обеспечивается возможность гибкой адаптации разработанного маршрута к изменяющимся внешним условиям, таким как объезд препятствий, так что оператор сельскохозяйственной машины полностью разгружен от рулевых маневров по возврату машины на первоначально разработанный маршрут. Кроме того, обеспечивается то преимущество, что оператор может в любое время изменить последовательность процесса обработки на конкретной территории, а система маршрутизации автоматически разрабатывает с учетом этого изменения новый маршрут, по которому далее машина автоматически ведет обработку. Поскольку оператор в любое время может вмешиваться в рулевое управление машиной, динамическая адаптация маршрутизации в простейшем случае достигается посредством того, что маршрут динамически адаптируется в зависимости от действительного положения и действительного направления движения машины. Способ динамической адаптации маршрутов работает тем точнее, чем чаще запрашивается действительное положение и действительное направление машины. Поэтому в предпочтительном примере осуществления изобретения предложена непрерывно работающая динамическая адаптация маршрута. В простейшем случае разработанный маршрут известным образом образован из множества участков пути, причем каждый из этих участков может быть определен по критериям оптимизации и, кроме того, последовательность обработки участков пути определяется по этим же или по другим критериям оптимизации. Для обеспечения, с одной стороны, повышения эффективности процесса обработки и, с другой стороны, минимальных повреждающих почву проходов по территории критериями оптимизации для учета системой маршрутизации могут быть Для предоставления оператору сельскохозяйственной машины наибольшей возможности влияния на систему маршрутизации в следующем предпочтительном примере осуществления предусмотрено, что оператор может отказаться от участка пути, предварительно выбранного для обработки системой маршрутизации, и выбрать другой из предварительно разработанных участков пути или самостоятельно определенный им маршрут. Далее, в предпочтительном примере осуществления система маршрутизации выполнена таким образом, что при выборе самостоятельно определенного участка пути система маршрутизации на основе этого введенного оператором маршрута разрабатывает новый маршрут, составленный из участков пути. Для решения поставленной задачи предложена также система маршрутизации для сельскохозяйственных машин, в которой для разработки последовательности процесса обработки на территории сельскохозяйственной машине присвоена определенная ширина обработки. Согласно изобретению, система маршрутизации выполнена с возможностью выработки стратегии обработки, причем стратегия обработки содержит координирование параллельных участков пути и дуг поворота, и/или учет числа и положений других сельскохозяйственных машин, находящихся на подлежащей обработке территории, и/или учет кинематики машины, геометрии подлежащей обработке территории, препятствий на подлежащей обработке территории, и/или учет характеристик убираемой массы, и/или учет желаний пользователя и предварительно заданного процесса обработки. За счет того, что система маршрутизации имеет такую структуру, что она может разрабатывать стратегии обработки, созданы условия для того, чтобы система маршрутизации могла координировать маршруты и связанные с ними процессы последовательности обработки для нескольких сельскохозяйственных машин. В простейшем случае стратегия обработки образуется тем, что маршруты различных транспортных средств, состоящие из параллельных участков пути и дуг поворота, скоординированы между собой таким образом, что совместно работающие машины всегда используют приблизительно одинаковые полосы движения, а развороты всегда производятся примерно в одних и тех же областях. Кроме того, стратегия обработки может учитывать кинематику сельскохозяйственных машин и геометрию подлежащих обработке площадей. Особенное преимущество при этом заключается в том, что, например, при совместной работе зерноуборочных комбайнов с одним или несколькими перегрузочными транспортными средствами для разгрузки бункеров комбайнов может обеспечиваться позиционирование этих перегрузочных транспортных средств таким образом, что комбайны могут удобным образом позиционироваться в области перегрузочных транспортных средств для перегрузки зерна. Другими словами, перегрузочные транспортные средства должны быть достаточно удалены от территории прохода машин с учетом круга поворота комбайна и длины устройства разгрузки бункера. Далее, разрабатываемая стратегия может быть выполнена зависимой от желаний пользователя. При этом пользователь задает, как правило, последовательности процесса обработки и соблюдение определенных параметров, например соблюдение величины потерь зерна при уборке зерновых и соблюдение времени обработки для окончания уборки до наступления плохой погоды. За счет того, что система маршрутизации дополнительно выполнена таким образом, что опознает маршруты и стратегии обработки, значительно снижается требуемый объем вычислений для разработки участков пути, образующих маршрут. В этом отношении особенно эффективная система маршрутизации создается в том случае, когда она может привлекать заложенные в памяти стратегии движения, которые определяют машины, работающие на данной территории либо одновременно, либо последовательно, и их оптимизированные маршруты. Для упрощения процессов вычислений и визуального представления в системе маршрутизации для разработки маршрута определена так называемая базовая линия или мастер-линия, при этом дальнейшие участки пути изображаются отстоящими от этой мастер-линии на расстояние, примерно равное ширине обработки сельскохозяйственной машины или кратное ее величине. С таким же эффектом в следующем предпочтительном примере осуществления мастер-линия, выполненная прямолинейной или криволинейной, определяется по меньшей мере двумя отстоящими друг от друга точками пути, причем воображаемое продолжение мастер-линии, проходящей через эти отстоящие друг от друга точки пути, служит направляющей линией, по которой производится направление сельскохозяйственной машины на подлежащей обработке территории. В простейшем случае оператор сельскохозяйственной машины определяет мастер-линию посредством ввода координат. Для уменьшения требуемого объема памяти и ускорения процесса вычислений для разработки маршрута в системе маршрутизации заложены алгоритмы, которые с учетом необходимой точности уменьшают число точек пути, необходимых для построения криволинейной основной линии. Для достижения наглядно структурированных маршрутов и сниженного количества рулевых маневров на сельскохозяйственной машине выгодно, когда система маршрутизации по изобретению вначале определяет участки пути, которые повторяют внешний контур подлежащей обработке территории или подлежащих объезду препятствий, а затем разрабатывает (генерирует) участки пути, проходящие примерно параллельно друг другу. При этом длины участков пути разрабатываемого маршрута по существу определяются внешним контуром подлежащей обработке территории или подлежащих объезду препятствий. Для того чтобы сельскохозяйственные машины на конце участков пути могли выполнять разворот для прохода к следующему участку пути обработки и при этом не повреждали еще не обработанные площади или находящуюся на них растительность, в следующем предпочтительном примере осуществления изобретения предложено возможное продолжение участков пути. Преимущество решения состоит в том, что сельскохозяйственная машина выводится из растительности достаточно далеко перед тем, как начать разворот. Для того чтобы оператор сельскохозяйственной машины мог оказывать непосредственное влияние на последовательность обработки участков пути, разработанных системой маршрутизации, образованный из участков пути маршрут визуально указывается оператору по меньшей мере в области концов участков пути. В том случае, когда оператор выбирает для обработки участок пути, отличный от следующего предлагаемого системой маршрутизации участка пути, система 20 маршрутизации автоматически разрабатывает требуемую кривую поворота для достижения выбранного участка пути. Особенное преимущество решения состоит в том, что водитель в значительной мере освобождается от части сложных рулевых маневров в области поворота. В простейшем случае выбор следующего участка пути для обработки осуществляется с помощью так называемого монитора с сенсорным экраном (Touch-Screen Monitor). Оператор сельскохозяйственной машины имеет также возможность смещать разработанные системой маршрутизации участки пути известным образом с помощью средств ввода, например, для того, чтобы компенсировать неточности данных GPS. Перечень чертежей Далее со ссылками на прилагаемые чертежи будут подробно описаны примеры осуществления изобретения. Фиг.1 схематично изображает систему маршрутизации в соответствии с изобретением, фиг.2 изображает подлежащую обработке территорию, разбитую на участки пути, фиг.3 изображает систему маршрутизации в одном примере выполнения, фиг.4 изображает систему маршрутизации в другом примере выполнения, фиг.5 изображает систему маршрутизации в виде блок-схемы. Сведения, подтверждающие возможность осуществления изобретения Фиг.1 схематично изображает систему 1 маршрутизации, которая уже известна из ЕР 0821296 и заложена в вычислительно-индикаторном устройстве 2 сельскохозяйственной машины 4, представленной здесь зерноуборочным комбайном 3. Вычислительно-индикаторное устройство 2 расположено в кабине 6 оператора 5 комбайна 3 в зоне видимости и доступности для управления. Спереди зерноуборочный комбайн оснащен навесным аппаратом 8, например, в виде жатвенного аппарата 7, ширина которого определяет ширину АВ обработки комбайна 3. Кроме того, сельскохозяйственная машина 4 снабжена так называемой GPS-антенной 9 для приема координат положения от системы GPS. Блок-схема системы маршрутизации показана на фиг.1 в увеличенном виде вынесенной и ограниченной штрихпунктирными линиями. Система 1 маршрутизации содержит один или несколько вычислительных алгоритмов 10, которые известным образом разрабатывают координаты положения сельскохозяйственной машины 4 из сигналов GPS, получаемых от GPS-антенны 9. С учетом критериев 11 оптимизации, как это будет подробно объяснено далее, а также характерных параметров 12 машины и характерных параметров 13 поля, вычислительные алгоритмы 10 разрабатывают выраженные в цифровой форме маршруты 14, которые в простейшем случае показываются оператору 5 с помощью индикаторного блока 16, выполненного в виде монитора 15 и расположенного в кабине 6. При этом система 1 маршрутизации этого типа может быть выполнена таким образом, что разработанные маршруты 14 могут храниться в запоминающем блоке 17 и повторно вызываться из него. Известно также, что из разработанных маршрутов 14 могут быть выведены управляющие сигналы Z, которые в зависимости от конфигурации маршрутов 14 воздействуют на систему 18 рулевого управления сельскохозяйственной машины 4 таким образом, что управляемые колеса 19 совершают поворот 20 для следования по маршруту 14. Фиг.2 изображает территорию 21, а именно подлежащее уборке поле 22 зерновых, по которому должна пройти сельскохозяйственная машина 4, выполненная в виде комбайна 3. Выбранное в качестве примера поле 22 имеет периметр, состоящий из прямолинейных и криволинейных внешних контуров 23. Географические данные этих внешних контуров 23 могут быть определены самим комбайном 3 таким образом, что оператор 5 направляет комбайн 3 вдоль этих внешних контуров 23, при этом система 1 маршрутизации разрабатывает первый маршрут 24 с использованием сигналов GPS. В простейшем случае система 1 маршрутизации разрабатывает этот маршрут 24 для положения, которое соответствует примерно середине ширины АВ обработки навесного аппарата 8, причем воспроизведение внешнего контура 23 проезжаемой территории 21 осуществляется последовательностью множества участков 25 пути. Такая система 1 маршрутизации может известным образом генерировать дальнейшие участки 25, 26 пути с учетом представленных на фиг.1 параметров, таких как самые различные критерии 11 оптимизации, а также характерные параметры 12 машины и характерные параметры 13 поля. В простейшем случае эти участки 25, 26 пути расположены по существу параллельно друг другу и либо образуют относительно сложный внешний контур 23, либо являются прямолинейными. Для обеспечения полной обработки территории 21 расстояния между соседними участками 25, 26 пути примерно соответствуют ширине АВ обработки навесного аппарата 8. Как показано на фиг.3, на подлежащей проходу территории 21 могут быть расположены одно или несколько препятствий 27, которые машина 4 должна объезжать. Кроме того, оператор машины может решить, например, изменить маршрут 14, разработанный системой 1 маршрутизации, таким образом, чтобы производить обработку территории 21 по частям. При этом в простейшем случае оператор 5 вмешивается в управление сельскохозяйственной машины 4 и производит ручное рулевое управление, например, с целью разделения территории 21 на первую и вторую площадки 28, 29. Зачастую оператор по самым разным субъективным критериям принимает решение о том, какие направления и участки обработки дадут эффективную обработку территории 21 в целом. Такими субъективными критериями могут быть, например, разделение подлежащей обработке территории 21 на простые по геометрии площадки с прямолинейными краями, требующие мало рулевых маневров, или необходимость объезда препятствий 27 или несозревшей, слишком влажной или полеглой убираемой культуры. Поскольку в этих случаях оператор 5 задает новый участок 30 пути, система 1 маршрутизации не может продолжать использовать в качестве опорного уже разработанный маршрут 14. В данном случае согласно изобретению предусмотрено, что система маршрутизации 1 распознает отклонение действительного положения 31 машины от заданного положения 32, определяемого заданным маршрутом 14, а также изменение действительного направления 33 машины от заданного направления 34, и на основе этого нового положения 31, 33 машины разрабатывает новый маршрут 14 Аналогичным образом оператор 5 может вмешиваться в рулевое управление при объезде препятствий 27. В данном примере выполнения в целях упрощения на фиг.3 представлен случай, когда оператор 5 для объезда препятствия 27 производит полностью ручное рулевое управление поворотами на участке 30 объезда до возвращения на предварительно разработанный маршрут 14. Изобретением предусмотрено, что оператор вводит в систему 1 маршрутизации окружной объезд, а система на основе этого изменения положения сельскохозяйственной машины 4 автоматически разрабатывает новый маршрут 14 Согласно описанным выше примерам осуществления разработанные системой 1 маршрутизации маршруты 14, 14 Следующим критерием 11 оптимизации может быть Вследствие того, что процессы обработки поля, как правило, осуществляются путем взаимодействия нескольких сельскохозяйственных машин 4, особенно эффективная система 1 маршрутизации создается в том случае, когда она посредством заложенных в ней вычислительных алгоритмов 10 способна разрабатывать стратегии обработки. В простейшем случае стратегия обработки ограничивается тем, что система маршрутизации разрабатывает участки 25, 26 пути и так называемые дуги 37 поворота и устанавливает определенную последовательность процесса обработки участков 25, 26 пути и дуг 37 поворота. В примере выполнения по фиг.4 при использовании двух комбайнов 3 стратегия обработки может заключаться, например, в том, что система маршрутизации 1 согласно предыдущим примерам осуществления вначале подразделяет подлежащую обработке территорию 21 на первую и вторую площадки 28, 29, а затем каждому комбайну 3 назначает для обработки площадку 28, 29. В этом случае стратегия обработки по существу заключается в том, чтобы учесть число и положение самых различных сельскохозяйственных машин 4, находящихся в эксплуатации на данной территории 21. В особенности при проведении так называемого процесса перегрузки, когда комбайн передает на перегрузочное транспортное средство 35 убранную массу, накопленную во время рабочих проходов уборки, особенно важно, чтобы комбайн 3 мог простым образом занимать нужное положение относительно перегрузочного транспортного средства 35 и чтобы при этом не создавались взаимные помехи с другими комбайнами, также загружающими перегрузочное транспортное средство 35. В простейшем случае это может надежно обеспечиваться за счет того, что стратегия обработки, разрабатываемая системой 1 маршрутизации, учитывает кинематику машин в зависимости от типа машин, геометрию территории 21, в особенности при так называемых проходах 36 на краю поля (разворотах на краю поля) и, в необходимых случаях, положение препятствий 27 на обрабатываемой территории 21. При этом кинематика машин образует характерные параметры 12 машин, которыми могут быть, например, возможные радиусы поворота и углы поворота рулевого колеса комбайна 3, геометрия его устройства 38 разгрузки бункера и габариты перегрузочного транспортного средства 35. Учет геометрии подлежащей обработке территории 21 имеет особенно важное значение при процессе перегрузки, схематично показанном на фиг.4, поскольку удобное достижение положения перегрузки существенно сокращает процесс перегрузки и, соответственно, ведет к сокращению потребных затрат вспомогательного времени. Кроме того, стратегия обработки может учитывать показатели убираемой массы, такие как полеглые зерновые, пустые участки, слишком высокую влажность культуры, причем такая информация в основном передается в систему 1 маршрутизации оператором 5 сельскохозяйственной машины 4. Как показатели убираемой массы, так и геометрия подлежащей обработке территории 21 образуют в системе 1 маршрутизации так называемые характерные параметры 13 поля. Далее, разрабатываемая системой 1 маршрутизации стратегия обработки может учитывать пожелания пользователя в том отношении, что пользователь предварительно задает, например, допустимые верхние пределы для потерь убранной массы или время обработки. Часто бывает, что пользователь на основе прошлого опыта предпочитает определенную последовательность процесса обработки, например, с учетом высыхания убираемой массы, которое под влиянием самых различных внешних условий может быть очень разным в пределах подлежащей обработке территории 21. Кроме того, стратегия обработки может предварительно задавать полную последовательность работ в том отношении, что в то время, как комбайн 3 еще обрабатывает территорию 21, уже начинаются последующие процессы, такие как, например, прессование выложенной на поле соломы или перепахивание стерни. Способ разработки маршрутов 14, схематично показанный на фиг.1, может осуществляться в соответствии с блок-схемой по фиг.5. В простейшем случае способ осуществляется таким образом, что оператор 5 сельскохозяйственной машины 4 на первом шаге 39 обходит по периметру подлежащую обработке территорию 21, причем географические данные внешнего контура 23 территории 21 определяются на с помощью системы GPS. В рамках изобретения возможен вариант, когда географические данные уже известной территории 21 могут передаваться непосредственно из банка 40 данных в систему 1 маршрутизации. В системе 1 маршрутизации посредством использования уже описанных вычислительных алгоритмов 10 и с учетом характерных параметров 12 машины и характерных параметров 13 поля на следующем шаге 41 обработки вычисляются участки 25, 26. На следующем шаге 42 обработки в системе 1 маршрутизации производится оптимизация разработанных маршрутов 14, 14 Для того чтобы разработанные маршруты 14, 14 Поскольку точное построение криволинейных участков 25, 26 пути требует значительного числа точек С, D пути, что связано с большим объемом вычислений, в следующем примере осуществления изобретения предусмотрено, что для системы 1 маршрутизации предназначены дополнительные вычислительные алгоритмы 49, которые в зависимости от предварительно определенных или предварительно определяемых пределов точности выполняют уменьшение точек С, D пути криволинейных участков 25, 26 пути, так что разработанный в конечном счете маршрут 14, 14 Для того чтобы оператор 5 сельскохозяйственной машины 4 мог оказать непосредственное воздействие на последовательность процесса обработки участков 25, 26 пути, образующих маршрут 14, 14 Для специалиста в данной области понятно, что при осуществлении изобретения возможны различные изменения и модификации описанной системы 1 маршрутизации или ее интегрирования в системы других машин в пределах объема защиты изобретения. Формула изобретения1. Система маршрутизации для сельскохозяйственных машин, причем для разработки маршрутов движения по территории сельскохозяйственной машине присвоена определенная ширина обработки, причем система маршрутизации выполнена с возможностью динамической адаптации запланированного маршрута, отличающаяся тем, что маршрут образован из множества участков пути, а участки пути разрабатываются по критериям оптимизации, причем критериями оптимизации являются «кратчайший участок пути/время обработки» и/или «низкая доля непродуктивного вспомогательного времени», и/или «короткие вспомогательные проходы между последовательными подлежащими обработке участками пути», и/или «опознавание и обработка уже известных маршрутов и последовательности процесса обработки», «короткие проходы на краю поля» и/или «минимизация проходов между сельскохозяйственной машиной и перегрузочным транспортным средством». 2. Система по п.1, отличающаяся тем, что запланированный маршрут динамически адаптируется в зависимости от действительного положения машины и действительного направления движения машины. 3. Система по любому из пп.1 и 2, отличающаяся тем, что динамическая адаптация маршрута производится непрерывно. 4. Система по любому из пп.1 и 2, отличающаяся тем, что выбор следующего подлежащего обработке участка пути определяется по критериям оптимизации. 5. Система по п.4, отличающаяся тем, что выполнена с возможностью отказа оператора сельскохозяйственной машины от предварительно выбранного маршрута и/или участка пути и выбора любого участка пути. 6. Система по п.5, отличающаяся тем, что при отказе оператора сельскохозяйственной машины от предварительно выбранного маршрута и/или участка пути система маршрутизации разрабатывает новый маршрут, составленный из участков пути. 7. Система маршрутизации для сельскохозяйственных машин, причем для разработки последовательности процесса обработки на территории сельскохозяйственной машине присвоена определенная ширина обработки, отличающаяся тем, что система маршрутизации выполнена с возможностью выработки стратегии обработки, причем стратегия обработки содержит координирование параллельных участков пути и дуг поворота, и/или учет числа и положений других сельскохозяйственных машин, находящихся на подлежащей обработке территории, и/или учет кинематики машины, геометрии подлежащей обработке территории, препятствий на подлежащей обработке территории, и/или учет характеристик убираемой массы, и/или учет желаний пользователя и предварительно заданного процесса обработки. 8. Система по п.7, отличающаяся тем, что система маршрутизации выполнена с возможностью запоминания маршрутов и стратегии обработки для подлежащей обработке территории и при повторной обработке опознавания и автоматического возврата к этим заложенным в память маршрутам и стратегии обработки. 9. Система по п.7 или 8, отличающаяся тем, что в основе маршрута, образованного участками пути, заложена мастер-линия, при этом соотнесенные с мастер-линией участки пути разрабатываются отстоящими от мастер-линии или друг от друга на расстояние, примерно равное ширине обработки сельскохозяйственной машины или кратное ее величине. 10. Система по п.9, отличающаяся тем, что мастер-линия может быть прямолинейной или криволинейной, при этом каждая мастер-линия задана, по меньшей мере, двумя отстоящими друг от друга точками (С, D) пути, а воображаемое продолжение участка мастер-линии, проходящее через эти точки (C, D) пути, служит направляющей линией. 11. Система по п.9, отличающаяся тем, что мастер-линия определяется оператором сельскохозяйственной машины. 12. Система по п.11, отличающаяся тем, что направляющая линия используется для автоматического ведения сельскохозяйственной машины. 13. Система по п.10, отличающаяся тем, что число разрабатываемых точек (С, D) пути криволинейных мастер-линий уменьшается посредством обработки с помощью вычислительных алгоритмов. 14. Система по п.9, отличающаяся тем, что участки пути вначале повторяют внешние контуры подлежащей обработке территории и/или огибают препятствия, находящиеся на подлежащей обработке территории, а затем проходят примерно параллельно друг другу. 15. Система по п.14, отличающаяся тем, что длины участков пути определяются внешним контуром подлежащей обработке территории или подлежащих объезду препятствий. 16. Система по п.15, отличающаяся тем, что участки пути маршрута продолжены настолько, что движущаяся по участку пути сельскохозяйственная машина при проходе на краю поля на подлежащей обработке территории выводится из территории так далеко, что поворот сельскохозяйственной машины возможен без контакта с необработанной растительностью. 17. Система по п.14 или 15, отличающаяся тем, что концевой переход от одного участка пути к следующему участку пути определяется посредством дуги поворота определенного прохода на краю поля. 18. Система по любому из пп.7, 8, 10-16, отличающаяся тем, что оператору сельскохозяйственной машины, по меньшей мере, в конце участка пути указываются следующие участки пути, при этом оператор может выбрать следующий подлежащий обработке участок пути, а система маршрутизации автоматически разрабатывает дугу для этого прохода на краю поля, причем дуга поворота может быть образована множеством участков пути. 19. Система по п.18, отличающаяся тем, что оператор может выбирать участки пути посредством использования монитора с сенсорным экраном. 20. Система по любому из пп.7, 8, 10-16, 19, отличающаяся тем, что участки пути могут быть смещены оператором сельскохозяйственной машины. TK4A Поправки к публикациям сведений об изобретениях в бюллетенях "Изобретения (заявки и патенты)" и "Изобретения. Полезные модели" Напечатано: (30) 03.06.2004DE 10200427242.25 Следует читать: (30) 03.06.2004DE 10200427242.5 Номер и год публикации бюллетеня: 9-2010 Код раздела: FG4A Извещение опубликовано: 10.06.2010 БИ: 16/2010 Популярные патенты: 2423807 Культиватор (варианты) и фреза для него ... фреза 11 имеет приводной вал, которым она установлена на раме 1 с возможностью приведения во вращение от привода культиватора, в данном случае от мотора 9 через передачу 10. С приводным валом фрезы 11 связано, по меньшей мере, два выполненных в виде (металлических, полимерных или тому подобного материала) стержней пальца 12 фрезы. В показанном варианте осуществления каждая фреза имеет четыре пальца 12. Пальцы 12 связаны с валом фрезы либо за счет прикрепления к периферии закрепленного на конце вала фрезы диска, либо, как в представленном варианте осуществления, за счет своего отогнутого продолжения 13, который под прямым углом прикреплен к валу фрезы.Каждый палец 12 ... 2420058 Способ выращивания зеленных культур в интенсивной светокультуре ... всходов горшочки с растениями выставляли на лотки 28, по которым рециркулировал питательный раствор, приготовленный с использованием технологии электрохимической активации.Пластиковые лотки 28 размещали на расстоянии 18 см друг от друга. Нами также были проведены исследования по изучению влияния активированных питательных растворов на урожайность и качество в строго контролируемых условиях методом водной культуры, где каждое растение салата выращивали в отдельном стеклянном сосуде в соответствии с методикой водной культуры.Для электроактивации воды использовали устройство на базе элемента ПЭМ-3 (проточный электрохимический модульный), выпускаемое серийно в ОАО НПО ... 2181542 Способ хранения эритроцитов в условиях охлаждения при отсутствии кислорода (варианты) ... и продлевает их выживаемость in vivo после переливания крови. 2 с. и 12 з.п. ф-лы, 4 ил. , , , ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУ Область изобретения. Изобретение относится по существу к жидкому консервированию крови и, более конкретно, к хранению крови в условиях охлаждения в отсутствие кислорода. Изобретение сделано при поддержке правительства по Контракту W-7405-ENG-36, заключенному U.S. Department of Energy с правлением the University of California. Правительство имеет определенные права на это изобретение. Предпосылки к созданию изобретения В настоящее время поступление крови значительно ниже, чем потребность в ней. Хранимая кровь оказывается ... 2454055 Устройство для ротационного внутрипочвенного рыхления с механическим приводом ... которая установлена на диске щелереза с зацеплением с внутренней промежуточной шестерней привода кольцевого щелереза и ведомой шестерней привода рыхлителя, зубьев и впадин зацепления ведущей, промежуточной внутреннего зацепления, промежуточной и ведомой шестерней привода рыхлителя, выполненных попарно комплементарно поочередно слева и справа вдоль зацепления каждой шестерни, ведущей, промежуточной внутреннего зацепления, промежуточной, центрирующей и ведомой шестерней привода рыхлителя, снабженных цилиндрическими опорными поверхностями, выполненными в виде отрезков цилиндрической поверхности, по которой идет взаимная обкатка элементов привода кольцевого щелереза, образующей ... 2073513 Способ профилактики технологических стрессов молодняка крупного рогатого скота ... показателей были в норме или приближались к ней, хотя и не достигли уровня до проведения каудотомии. После каудотомии в крови бычков происходили изменения, характеризующие ухудшение состояния животных: отмечен сдвиг в организме углеводного, белкового, липидного и минерального обменов, происходило увеличение форменных элементов крови и концентрация многих веществ в сыворотке, чему в значительной степени способствовало обезвоживание тканей (дегидратация) в организме. Об этом свидетельствовали данные и по содержанию сахара, липидов, белка, и величина гематокрита. Однако у опытных бычков все перечисленные показатели были менее выражены. Так, если у контрольного молодняка ... |
Еще из этого раздела: 2218756 Способ изготовления антипаразитарного ошейника 2112341 Лапа плоскорежущая 2464784 Защитный слой для растений и деревьев, его изготовление и его применение 2144756 Селекционная сеялка для посева семян в кассеты 2038763 Регулятор вакуума 2490849 Способ переработки безподстилочного помета птиц клеточного содержания и навоза свиней в топливные брикеты 2015654 Теплица для подземной выработки 2279799 Балансир рыболовный 2091023 Способ защиты растений от заболеваний, вызванных нематодами 2177226 Способ защиты растений от болезней, регулирования их роста и защитно-стимулирующий комплекс для его осуществления |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||
 учет кратчайшего участка пути
учет кратчайшего участка пути или аналогичный ему
или аналогичный ему  , при этом новый маршрут 14
, при этом новый маршрут 14