Способ определения параметров хода трала и устройство для определения параметров хода тралаПатент на изобретение №: 2281649 Автор: Каратаев Робиндар Николаевич (RU), Каратаев Олег Робиндарович (RU), Каратаев Оскар Робиндарович (RU), Латыпов Равиль Ахатович (RU) Патентообладатель: Каратаев Робиндар Николаевич (RU) Дата публикации: 20 Марта, 2006 Начало действия патента: 8 Октября, 2004 Адрес для переписки: 420021, г.Казань, ул. Карима Тинчурина, 3А, кв.16, Р.Н.Каратаеву Изображения 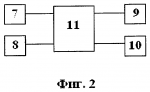 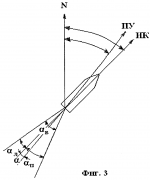 Изобретение относится к области промысловой навигации и промышленного рыболовства при помощи буксируемых орудий лова, преимущественно к траулерам с кормовым тралением, и предназначено автоматизировать непрерывный контроль параметров хода и работы трала. Дополнительно формируют сигналы по величине отклонений углов правого и левого ваеров относительно диаметральной плоскости судна-буксировщика и сигналы по величине углов ухода правого и левого ваеров в воду относительно плоскости ватерлинии судна-буксировщика, по которым определяют сигналы о параметрах хода трала и движения судна-буксировщика. Устройство имеет правый и левый преобразователи углов отклонений ваеров от диаметральной плоскости судна-буксировщика и углов ухода ваеров в воду относительно плоскости ватерлинии судна-буксировщика, выходы которых являются выходами устройства по параметрам хода трала и движения судна-буксировщика. Обеспечивается расширение функциональных возможностей - позволяет определить промысловые курсы и произвести достоверную оценку с достаточной точностью параметров хода трала и параметров движения судна-буксировщика. 2 н. и 6 з.п. ф-лы, 3 ил. Изобретение относится к области промысловой навигации и промышленного рыболовства при помощи буксируемых орудий лова, преимущественно к траулерам с кормовым тралением, и предназначено автоматизировать непрерывный контроль параметров хода и работы трала. Известно устройство контроля перекоса рыболовного трала, которое включает датчик симметрии с излучающе-приемной системой и чувствительными элементами, канал связи и бортовой приемник-индикатор/регистратор тралового зонда, при этом бортовой приемник/регистратор тралового зонда снабжен измерителями временных интервалов (в единицах расстояния) между моментами прихода к излучающеприемной системе датчика симметрии ответных сигналов чувствительных элементов, а чувствительные элементы выполнены в виде акустических приемоответчиков-глубиномеров-ретрасляторов с формирователями временных стробов манометрического типа, устанавливаемых на траловых досках (А.С. СССР №1784154, А 01 К 73/10. "Устройство контроля перекоса рыболовного трала", опубл. 30.12.1992. Бюл. №48) - [1]. Недостатком известного устройства является то, что оно может контролировать только характеристики состояния трала. Известен способ, заключающийся в измерении и сравнении расстояний между опорной точкой, расположенной на оси симметрии трала, и контрольными точками, расположенными на трале или его элементах симметрично относительно оси. Кроме того, измеряют расстояния между горизонтами опорной и каждой из контрольных точек и по алгебраической разности этих расстояний судят о наличии и величине перекоса (А.С. СССР №1395247, А 01 К 73/10. "Способ определения перекоса рыболовного трала", опубл. 15.05.1988. Бюл. №18) - [2]. Недостатком известного способа является то, что он предусматривает установку устройства для его осуществления за бортом - на трале и его элементах. Наиболее близким к заявляемому изобретению является способ, реализованный в устройстве, и устройство контроля перекоса рыболовного трала по авторскому свидетельству СССР №1253556, А 01 К 73/10, опубликованному 30.08.1986. Бюл. №32 - [3]. Устройство-прототип содержит датчик перекоса, закрепленный в середине подбора трала, приемник сигнала датчика, установленный на борту судна, канал связи между датчиком перекоса и приемником сигнала и два усилителя, закрепленные на подборе. Датчик перекоса выполнен электрохимическим, состоящим из элементов Г-образной формы, имеющих конусные насадки и установленных так, что одни колена элементов направлены вдоль подборы в разные стороны, а другие колена перпендикулярно подборе, при этом входы усилителей соединены с электрохимическим датчиком, а выходы - с приемником сигнала, выполненным в виде двух записывающих приборов. В этом устройстве реализован способ, по которому получают информацию о наличии перекоса устья трала и бокового горизонтального течения и устраняют перекосы устья трала и выбирают курс судна, совпадающий с вектором течения судна-буксировщика. Однако по этому способу и устройству недостаточно точно и комплексно решают задачу буксировки трала по оптимальному курсу. Технический эффект, на достижение которого направлено заявляемое изобретение, заключается в расширении функциональных возможностей за счет определения параметров хода трала: отклонения ваеров от диаметральной плоскости (ДП) судна, угла раствора ваеров и угла ухода ваеров в воду (перекоса трала) и параметров движения судна-буксировщика: угла дрейфа (сноса) и путевого угла (ПУ). Технический эффект достигается тем, что по способу определения параметров хода трала, по которому формируют сигналы о перекосе трала, новым является то, что дополнительно формируют сигналы по величине отклонений углов правого и левого ваеров относительно диаметральной плоскости судна-буксировщика и сигналы по величине углов ухода правого и левого ваеров в воду относительно плоскости ватерлинии судна-буксировщика, по которым определяют сигналы о параметрах хода трала и движения судна-буксировщика. Сигнал о перекосе трала образуют при нарушении равенства углов ухода правого и левого ваеров в воду относительно плоскости ватерлинии судна-буксировщика и определяют как разность сигналов величин углов ухода правого и левого ваеров в воду относительно плоскости ватерлинии судна-буксировщика. Угол раствора ваеров определяют как величину, пропорциональную сумме сигналов отклонений углов правого и левого ваеров относительно диаметральной плоскости судна-буксировщика. Угол дрейфа определяется как величину, пропорциональную разности сигналов отклонений углов левого и правого ваеров. Путевой угол находят как результат сложения истинного курса и угла дрейфа. В устройстве для определения параметров хода трала, содержащем датчики перекоса трала и вычислительный блок, новым является то, что устройство имеет правый и левый преобразователи углов отклонений ваеров от диаметральной плоскости судна-буксировщика и углов ухода ваеров в воду относительно плоскости ватерлинии судна-буксировщика, каждый из которых содержит неподвижную платформу с вертикальной осью, установленную на судне-буксировщике вблизи ухода каждого из ваеров за борт, подвижную платформу с вертикальным шарниром, посаженную на вертикальную ось неподвижной платформы с возможностью поворота, штангу, свободный конец которой соприкасается с ваером, а другой конец жестко соединен с вертикальным шарниром подвижной платформы, и датчики углов отклонения ваеров относительно диаметральной плоскости и плоскости ватерлинии судна-буксировщика, при этом датчики подключены к вычислительному блоку, являющемуся выходом устройства по параметрам хода трала и движения судна-буксировщика. Датчики углов отклонения ваеров относительно диаметральной плоскости установлены на неподвижной платформе, а их чувствительные элементы функционально связаны с подвижной платформой. Датчики углов отклонения ваеров относительно плоскости ватерлинии судна-буксировщика установлены на подвижной платформе, а их чувствительные элементы функционально связаны с вертикальным шарниром. В устройстве свободный конец штанги снабжен наконечником, в котором установлены постоянные магниты. Сущность изобретения поясняется на Фиг.1-3, где: Фиг.1 - схема устройства; Фиг.2 - блок-схема; Фиг.3 - схема параметров движения судна-буксировщика и хода трала. Здесь: 1 - штанга; 2 - наконечник с постоянным магнитом; 3 - подвесной ролик; 4 - ваер; 5 - неподвижная платформа; 6 - подвижная платформа с вертикальным шарниром; 7 - датчик угла отклонения правого ваера относительно диаметральной плоскости судна-буксировщика; 8 - датчик угла отклонения левого ваера относительно диаметральной плоскости судна-буксировщика; 9 - датчик угла ухода в воду правого ваера относительно плоскости ватерлинии судна-буксировщика; 10 - датчик угла ухода в воду левого ваера относительно плоскости ватерлинии судна-буксировщика; 11 - вычислительное устройство. Датчики 7-10 могут быть выполнены омическими, индуктивными, емкостными, трансформаторными и т.д. (Д.И.Агейкин и др. Датчики контроля и регулирования. - М.: Машиностроение, 1965, с.24-32, 114, 149, 205) - [4]. Например, в качестве датчиков 7-10 могут использоваться сельсины (Шульц Ю. Электроизмерительная техника: 1000 понятий для практиков: Справочник: Перевод с нем. - М.: Энергоатомиздат, 1989, с.194-195) - [5]. Устройство для определения параметров хода трала состоит из правого и левого преобразователей углов отклонений ваеров 4 от диаметральной плоскости судна-буксировщика и углов ухода ваеров в воду относительно плоскости ватерлинии, установленных в районе ухода ваеров 4 за борт и закрепленных в удобном месте на судне-буксировщике, например над подвесным роликом 3 (не показано). Выходы правого и левого преобразователей углов отклонений ваеров от диаметральной плоскости судна-буксировщика и углов ухода ваеров в воду относительно плоскости ватерлинии судна-буксировщика являются выходами устройства по параметрам хода трала и движения судна-буксировщика. Каждый преобразователь (правый и левый) состоит из неподвижной платформы 5 с вертикальной осью, на которую посажена с возможностью горизонтального поворота подвижная платформа 6 с вертикальным шарниром. Правый (левый) преобразователь содержит датчик 7 (8) угла отклонения правого (левого) ваера 4 от диаметральной плоскости судна-буксировщика, установленный на неподвижной платформе 5 с вертикальной осью (например, статор сельсина), причем чувствительный элемент датчиков (например, ротор сельсина) функционально (кинематически) связан с подвижной платформой 6. Для визуального отсчета корпус неподвижной платформы 5 снабжен шкалой. На подвижной платформе 6 с вертикальным шарниром расположены датчики 9 (10) углов ухода ваера в воду относительно плоскости ватерлинии судна-буксировщика (например, статор сельсина), у которого чувствительный элемент (например, ротор сельсина) функционально (кинематически) связан с штангой 1. Для визуального отсчета углов поворота штанги 1 корпус подвижной платформы 6 также снабжен шкалой. Сигналы с датчиков 7 (8) углов отклонения правого и левого ваера относительно диаметральной плоскости судна-буксировщика и с датчиков 9 (10) углов ухода в воду правого и левого ваера относительно плоскости ватерлинии судна-буксировщика поступают на вычислительное устройство 11, которое преобразует их, формирует, регистрирует, вычисляет параметры хода трала, его состояния, вычисляет параметры движения судна-буксировщика и выдает на показывающие устройства. Каждый вертикальный шарнир подвижной платформы 6 жестко соединен со штангой 1, свободный конец которой снабжен наконечником 2 с вмонтированным постоянным магнитом для надежного контакта с ваером 4. Предложенное устройство работает следующим образом. После окончания спуска трала, когда ваеры взяты на стопор, свободный конец каждой (правой и левой) штанги 1 при помощи наконечника 2, снабженного постоянным магнитом, устанавливается на соответствующий (правый и левый) ваер 4. Сигналы от датчиков углов отклонений от диаметральной плоскости судна-буксировщика 7, 8 и углов отклонений от плоскости ватерлинии судна-буксировщика 9, 10 поступают на вычислительное устройство 11, определяющее параметры хода трала и движения судна-буксировщика. Угол Путевой угол (ПУ) находят как результат сложения истинного курса (ИК) и угла Угол Неравенство углов ухода правого и левого ваеров в воду сигнализирует о перекосе трала и его ненормальной работе (как правило, трудно устранимого). Угол дрейфа (сноса) также характеризует наличие перекоса трала (легко устранимого). Колебание угла раствора ваеров указывает, что траловые доски работают ненормально. Резкое или одновременное изменение угла раствора ваеров и углов ухода ваеров в воду указывает на задев трала. Угол ухода ваеров в воду является функцией скорости трала (судна). Знание указанных параметров хода трала создает предпосылки для безаварийной и производительной работы при добыче рыбы. Судоводитель по полученной информации более эффективно маневрирует тралом и судном-буксировщиком, что ведет к повышению производительности труда. Так, например, отклонение ваеров относительно диаметральной плоскости судна-буксировщика указывает на дрейф (снос) судна-буксировщика и позволяет вычислить путевой угол (ПУ) судна-буксировщика, что важно само по себе для безопасности судовождения. Кроме того, знание путевого угла судна-буксировщика позволяет уточнить и выбрать более эффективные промысловые курсы. Знание отклонения ваеров относительно диаметральной плоскости судна-буксировщика позволяет точно вычислить, на сколько следует потравить один из ваеров, чтобы выровнять ход трала. Угол раствора ваеров указывает на степень раскрытия трала и является косвенным признаком скорости трала и судна-буксировщика. Колебание угла раствора ваеров указывает, что траловые доски работают ненормально. Таким образом, предложены способ и устройство для определения параметров хода трала преимущественно для судов с кормовым тралением, позволяющие определить количественно и произвести достоверную оценку с достаточной точностью параметров хода трала и параметров движения судна-буксировщика. Формула изобретения1. Способ определения параметров хода трала, по которому формируют сигналы о перекосе трала, отличающийся тем, что дополнительно формируют сигналы по величине отклонений углов правого и левого ваеров относительно диаметральной плоскости судна-буксировщика и сигналы по величине углов ухода правого и левого ваеров в воду относительно плоскости ватерлинии судна-буксировщика, по которым определяют сигналы о параметрах хода трала и движения судна-буксировщика. 2. Способ п.1, отличающийся тем, что сигнал о перекосе трала образуют при нарушении равенства углов ухода правого и левого ваеров в воду относительно плоскости ватерлинии судна-буксировщика и определяют как разность сигналов величин углов ухода правого и левого ваеров в воду относительно плоскости ватерлинии судна-буксировщика. 3. Способ п.1, отличающийся тем, что угол раствора ваеров определяют как величину, пропорциональную сумме сигналов отклонений углов правого и левого ваеров относительно диаметральной плоскости судна-буксировщика. 4. Способ п.1, отличающийся тем, что угол дрейфа определяется как величину, пропорциональную разности сигналов отклонений углов левого и правого ваеров. 5. Способ п.1, отличающийся тем, что путевой угол находят как результат сложения истинного курса и угла дрейфа. 6. Устройство для определения параметров хода трала, содержащее датчики перекоса трала и вычислительный блок, отличающееся тем, что устройство имеет правый и левый преобразователи углов отклонений ваеров от диаметральной плоскости судна-буксировщика и углов ухода ваеров в воду относительно плоскости ватерлинии судна-буксировщика, выходы которых являются выходами устройства по параметрам хода трала и движения судна-буксировщика. 7. Устройство по п.6, отличающееся тем, что каждый из преобразователей углов отклонений ваеров относительно диаметральной плоскости судна-буксировщика и углов ухода ваеров в воду относительно плоскости ватерлинии судна-буксировщика содержит неподвижную платформу с вертикальной осью, установленную на судне-буксировщике вблизи ухода каждого из ваеров за борт, подвижную платформу с вертикальным шарниром, посаженную на вертикальную ось неподвижной платформы с возможностью поворота, штангу, свободный конец которой соприкасается с ваером, а другой конец жестко соединен с вертикальным шарниром подвижной платформы, и датчики углов отклонений ваеров относительно диаметральной плоскости и плоскости ватерлинии судна-буксировщика, при этом датчики подключены к вычислительному блоку, являющемуся выходом устройства по параметрам хода трала и движения судна-буксировщика. 8. Устройство п.6, отличающееся тем, что свободный конец штанги снабжен наконечником, в котором установлены постоянные магниты. MM4A - Досрочное прекращение действия патента СССР или патента Российской Федерации на изобретение из-за неуплаты в установленный срок пошлины за поддержание патента в силе Дата прекращения действия патента: 09.10.2007 Извещение опубликовано: 27.06.2009 БИ: 18/2009 Популярные патенты: 2247490 Способ освоения закустаренных земель и устройство для его осуществления ... остатков производят в направлении пригибания, при этом оптимальный угол наклона кустарниковой растительности определяется как о= д- а, где д - оптимальный угол резания древесины, а - оптимальный угол разделки дернины.Известна так же дисковая борона БМН-2,5 для осуществления способа-прототипа, включающая базовый трактор и рабочий орган с двумя секциями дисковых батарей, передняя из которых смонтирована на раме, навешанной на трактор, а задняя секция шарнирно соединена с рамой и установлена с возможностью подъема относительно нее с помощью гидроцилиндров. В качестве рабочих органов в данной бороне используют сферические диски с вырезами по периметру, улучшающими ... 2228588 Копатель корнеклубнеплодов ... его работы, которая зависит от поступательной скорости движения агрегата с устройством.Задачей заявляемого изобретения является упрощение конструкции, повышение эффективности выкапывания и предварительной очистки от почвы корнеклубнеплодов.Поставленная задача достигается тем, что копатель корнеклубнеплодов содержит раму, лемех с вилообразными прутками, расположенными горизонтально, и сегментом, кривошипно-шатунный механизм колебательного движения в вертикальной плоскости и механизм привода вибрационного движения в горизонтальной плоскости перпендикулярно поступательному движению агрегата, при этом хорда сегмента отклонена от направления шатуна на угол менее 90, который ... 2218756 Способ изготовления антипаразитарного ошейника ... Заявленный способ является промышленно применимым, так как он может быть использован для изготовления антипаразитарных ошейников для животных. Заявленный способ реализуют посредством известного средства - экструдера (шнек-машины), содержащего устройство для загрузки, материального цилиндра со шнеком и формующую головку (Торнер Р.В., Акутин М.С. Оборудование заводов по переработке пластмасс. Химия, 1986, с. 91-193, рис. 5-41, 5-52). Способ изготовления антипаразитарного ошейника из композиции на основе термопластичного полимера, с добавлением диазинона и вспомогательных компонентов получен путем экструзии. Пример 1. Компоненты композиции на основе термопластичного полимера сэвилена - ... 2388213 Способ измерения урожайности травяного покрова ... табл.3.На правом берегу малой реки Ировка со стороны деревни урожайность вдоль травяной полосы почти в полтора раза меньше по сравнению с левобережной травяной полосой. При этом разброс значений урожайности поперек реки значительно выше по сравнению с продольным распределением травяного покрова. Таблица 3 Урожайность травяного покрова по трем травяным полосам вдоль малой реки пробной площадкиi Площадь компоненты S, ×104 м2 Удельная масса, г/м Урожайность, ц/га Масса травы, т сырой травы mсухого сенаmc сырой травы qсухого сенаqc сырой травы Мсухого сена Mc Левобережная травяная полоса 11.260 880248.2 88.024.82 11.093.13 2 0.420580 174.758.0 17.472.44 ... 2060650 Дозатор концентрированных кормов ... которое выполнено в виде спиральных пружин 8, установленных на свободных концах роликов 7 и переменным резистором 9. Внутренние концы спиральных пружин 8 жестко закреплены к свободным концам роликов 7, а наружные к вертикально установленным планкам 4. Корпус переменного резистора 9 жестко соединен с одной из вертикальных планок, а движок соосно и жестко с торцом одного из роликов 7. Переменный резистор 9 подключен к блоку управления выдачей корма 10. Во втулке 6 крестовины 5 механизма взвешивания уставлен с возможностью осевого поворота вал 11 с закрепленной на одном его конце емкостью 12. Вал 11 снабжен также приводом его осевого поворота и средством возврата в исходное ... |
Еще из этого раздела: 2196403 Почвообрабатывающий модуль 2160520 Способ создания лакричных плантаций, предпочтительно солодки голой, на бросовых землях 2201069 Травяное покрытие на основе гибкого полотна 2228024 Способ профилактики мастита у коров и устройство для его осуществления 2262844 Способ повышения эффективности воспроизводства икры и численности осетрообразных рыб 2167648 Средство для защиты от укусов кровососущих насекомых (варианты) и способ его получения 2482660 Способ выращивания рапса ярового на семена 2227965 Способ возделывания бахчевых культур и устройство для его осуществления 2062564 Способ оценки устойчивости растений к засухе северного и южного типа на ранних этапах онтогенеза 2159030 Способ широкорядного посева пропашных культур |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||
 дрейфа (сноса) определяется как разность угла отклонения левого ваера
дрейфа (сноса) определяется как разность угла отклонения левого ваера