Способ автоматического регулирования загрузки зерноуборочного комбайнаПатент на изобретение №: 2009632 Автор: Жданов Г.П., Бобрышев Г.П., Сахончик С.В., Ильин И.А., Смирнов Б.Н. Патентообладатель: Сибирский научно-исследовательский институт механизации и электрификации сельского хозяйства Дата публикации: 30 Марта, 1994 Адрес для переписки: подача заявки17.04.1991 публикация патента30.03.1994 Изображения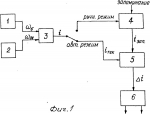 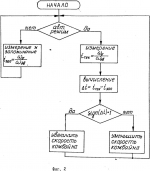 Сущность: способ заключается в том, что предварительно в ручном регулировании загрузки измеряют частоту вращения молотильного барабана и частоту вращения вала двигателя. Определяют отношение измеренных величин и запоминают его. В автоматическом режиме регулирования загрузки непрерывно измеряют частоту вращения молотильного барабана и вала двигателя, а текущее отношение измеренных величин сравнивают с запомненным в ручном режиме работы и по разности между текущим значением и запомненным осуществляют управление поступательной скоростью движения комбайна. 2 ил. , ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУИзобретение относится к сельскохозяйственному машиностроению и может быть использовано для автоматического регулирования загрузки и стабилизации режимов рабочих органов зерноуборочных комбайнов. Известен способ автоматического регулирования загрузки зерноуборочного комбайна, комбайн близкий к изобретению и заключающийся в том, что измеряют частоту вращения молотильного барабана комбайна, сравнивают измеренное значение с заданным и изменяют скорость комбайна в соответствии с полученным разностным сигналом рассогласования [1] . Недостатком известного способа является низкая точность регулирования в условиях неравномерности рельефа убираемого поля. Целью изобретения является повышение точности способа регулирования загрузки зерноуборочного комбайна за счет исключения влияния составляющей нагрузки на ходовую часть. Это достигается тем, что предварительно в ручном режиме управления загрузкой одновременно измеряют частоту вращения молотильного барабана и коленчатого вала двигателя, определяют отношение этих величин и запоминают его, затем в режиме автоматического регулирования непрерывно измеряют частоту вращения молотильного барабана и вала двигателя, а отношение измеренных величин сравнивают с запомненным в ручном режиме, принимают это отношение за сигнал рассогласования и в зависимости от значения этого сигнала регулируют поступательную скорость комбайна. Сущность заявляемого технического решения заключается в том, что измеряемый информационный параметр - отношение частоты вращения молотильного барабана к частоте вращения вала двигателя характеризует проскальзывание в ременном приводе. В то же время известно, что при постоянном передаточном отношении проскальзывание прямо пропорционально передаваемому крутящему моменту, поэтому оно в ременном приводе молотильного барабана однозначно характеризует его загрузку. Таким образом, заявляемая совокупность признаков обеспечивает получение сигнала, пропорционального только загрузке молотильного барабана и свободного от составляющей, обусловленной нагрузкой на ходовую часть комбайна. На фиг. 1 приведена блок-схема устройства для осуществления способа; на фиг. 2 - блок-схема алгоритма работы устройства. Устройство для осуществления способа состоит из датчика 1 частоты вращения молотильного барабана, датчика 2 частоты вращения коленчатого вала двигателя, блока 3 отношения, блока 4 памяти, блока 5 сравнения и блока 6 управления, с которого сигнал подается на исполнительный механизм (на чертеже не показан) управления скоростью комбайна. Выходы датчиков 1 частоты вращения молотильного барабана и датчика 2 частоты вращения двигателя комбайна соединены с входом блока 3 отношения, выход которого соединен с входом блока 4 памяти и входом блока 5 сравнения, второй вход которого соединен с выходом блока памяти. Выход блока сравнения соединен с блоком управления. Работа по данному способу осуществляется следующим образом. В начале работы в ручном режиме регулирования загрузки зерноуборочного комбайна устанавливают номинальную загрузку и датчиками 1 и 2 одновременно измеряют частоты вращения молотильного барабана б и вала двигателя дв. В блоке 3 получают сигнал, пропорциональный отношению измеряемых величин i = б/дв . Это значение запоминается в блоке памяти 4 - iзап. Затем переключают устройство на автоматический режим регулирования загрузки и далее в процессе работы комбайна непрерывно измеряются частоты вращения молотильного барабана б и двигателя двопределяется в блоке 3 текущее отношение измеряемых величин iтек = б/дв, которое в блоке 5 сравнивается с запомненным значением iзап и вырабатывается сигнал рассогласования б и вала двигателя дв. В блоке 3 получают сигнал, пропорциональный отношению измеряемых величин i = б/дв . Это значение запоминается в блоке памяти 4 - iзап. Затем переключают устройство на автоматический режим регулирования загрузки и далее в процессе работы комбайна непрерывно измеряются частоты вращения молотильного барабана б и двигателя двопределяется в блоке 3 текущее отношение измеряемых величин iтек = б/дв, которое в блоке 5 сравнивается с запомненным значением iзап и вырабатывается сигнал рассогласования  i = iтек - iзап. Сигнал рассогласования i в блоке 6 управления преобразуется в команды на уменьшение или увеличение скорости комбайна. На фиг. 2 приведена блок-схема алгоритма работы устройства, который включает в себя следующие операции - анализ режима: ручной или автоматический. В случае ручного режима происходит измерение и запоминание iзап = б/дв . В случае автоматического режима регулирования загрузки происходят последовательные операции: измерения iтек = б/дв , вычисления i = iтек - iзап, выбор воздействия на исполнительные органы sign ( i) = 1, затем следует переход на начало программы и цикл повторяется. После каждого выполнения операции выбора sig n (i) = 1 в блоке управления вырабатывается сигнал на уменьшение или увеличение скорости комбайна. Если в процессе работы комбайна уменьшилась загрузка молотильного барабана, то проскальзывание в приводе барабана уменьшится и величина iтек также уменьшится. При этом i = iтек - iзап станет отрицательной, что приведет к выработке блоком 6 управления команды на увеличение скорости движения комбайна, что увеличит загрузку барабана, и наоборот. Таким образом происходит стабилизация загрузки молотильного барабана. Работа блока 6 управления не отличается от аналогичного блока прототипа. Устройство может быть реализовано на микропроцессорной системе, функционирующей в соответствии с алгоритмом (фиг. 2). В качестве датчиков частот вращения двигателя и молотильного барабана могут использоваться любые известные для этих целей датчики. Заявляемые техническое решение позволяет повысить точность регулирования за счет исключения влияния нагрузки на ходовую часть комбайна, которая является переменной случайной величиной при неравномерности рельефа поля. (56) Авторское свидетельство СССР N 745417, кл. А 01 D 41/12, 1980. i = iтек - iзап. Сигнал рассогласования i в блоке 6 управления преобразуется в команды на уменьшение или увеличение скорости комбайна. На фиг. 2 приведена блок-схема алгоритма работы устройства, который включает в себя следующие операции - анализ режима: ручной или автоматический. В случае ручного режима происходит измерение и запоминание iзап = б/дв . В случае автоматического режима регулирования загрузки происходят последовательные операции: измерения iтек = б/дв , вычисления i = iтек - iзап, выбор воздействия на исполнительные органы sign ( i) = 1, затем следует переход на начало программы и цикл повторяется. После каждого выполнения операции выбора sig n (i) = 1 в блоке управления вырабатывается сигнал на уменьшение или увеличение скорости комбайна. Если в процессе работы комбайна уменьшилась загрузка молотильного барабана, то проскальзывание в приводе барабана уменьшится и величина iтек также уменьшится. При этом i = iтек - iзап станет отрицательной, что приведет к выработке блоком 6 управления команды на увеличение скорости движения комбайна, что увеличит загрузку барабана, и наоборот. Таким образом происходит стабилизация загрузки молотильного барабана. Работа блока 6 управления не отличается от аналогичного блока прототипа. Устройство может быть реализовано на микропроцессорной системе, функционирующей в соответствии с алгоритмом (фиг. 2). В качестве датчиков частот вращения двигателя и молотильного барабана могут использоваться любые известные для этих целей датчики. Заявляемые техническое решение позволяет повысить точность регулирования за счет исключения влияния нагрузки на ходовую часть комбайна, которая является переменной случайной величиной при неравномерности рельефа поля. (56) Авторское свидетельство СССР N 745417, кл. А 01 D 41/12, 1980.
ФОРМУЛА ИЗОБРЕТЕНИЯСПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ЗЕРНОУБОРОЧНОГО КОМБАЙНА , заключающийся в измеpении частоты вpащения молотильного баpабана, отличающийся тем, что, с целью повышения точности pегулиpования путем исключения влияния нагpузки на ходовую часть, в pучном pежиме pаботы измеpяют частоту вpащения вала двигателя, опpеделяют отношение частоты вpащения молотильного баpабана к частоте вpащения вала двигателя и запоминают его, пpи этом в автоматическом pежиме pаботы непpеpывно измеpяют частоту вpащения молотильного баpабана и вала двигателя, опpеделяют отношение измеpенных величин, сpавнивают его с запомненным в pучном pежиме pаботы, пpинимают это отношение за сигнал pассогласования и в зависимости от значения этого сигнала pегулиpуют поступательную скоpость комбайна.Популярные патенты: 2062564 Способ оценки устойчивости растений к засухе северного и южного типа на ранних этапах онтогенеза ... температурам на ранних этапах онтогенеза. Сиб. ин-т физиол. и биох. растений. 3673802/30-15; заявл. 15.12.83. Опубл. 07.02.86. Бюлл. N 5 2с. 5. Родченко О. П. Гюльвердиева Г.Г. Бурбанова Р.С. Заявка на авторское свидетельство N 4748158/13 (Положительное решение от марта 1991 г.). Способ оценки устойчивости растений к засухе на ранних этапах онтогенеза. ТТТ1 ТТТ2 ФОРМУЛА ИЗОБРЕТЕНИЯ Способ оценки устойчивости растений к засухе северного и южного типа на ранних этапах онтогенеза, включающий экспонирование двухдневных проростков в течение 24 ч на растворе осмотика и последующее определение интенсивности ростовых процессов по степени восстановления скорости роста корня в ... 2228022 Способ ведения виноградных кустов ... по 2-3 верхних на каждом штамбе, удалив все нижние. При достижении длины пасынков первого порядка 20 см их вновь прищипывали над третьим узлом для вызова пасынковых побегов второго порядка с целью создания из них при обрезке плодовых звеньев.Весной третьего года при обрезке на каждом кусте вокруг головы было оставлено до 6 коротких рукавов из побегов пасынков первого порядка, на каждом из которых были сформированы плодовые звенья (сучок замещения - 2-3 глазка и плодовая стрелка - до 5 глазков) из пасынков второго порядка. Кусты приняли вид средней чашевидной формы.В течение третьей и последующих вегетаций побеги, развившиеся на сучках замещения и плодовых стрелках, свободно ... 2120709 Рама плуга ... или трапеции. Предлагаются также соотношения, определяющие параметры некоторых элементов конструкции. Такая конструкция обеспечит повышение прочности консольной части диагонального бруса рамы и исключение поломок ее хвостовой части при вспышке сухих твердых почв. 10 з.п. ф-лы, 2 ил. , ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУ Изобретение относится к сельскохозяйственному машиностроению, в частности к многокорпусным плугам общего назначения для работы в различных почвенно-климатических условиях. Известен навесной многокорпусный плуг типа ПЛН-5-35, состоящий из трех брусьев: поперечного, продольного и диагонального, соединенных между собой без каких-либо ... 2169462 Улей (варианты), способ его сборки и способ круглогодичного содержания в нем пчел ... параметры стоек и подставки, как показал опыт проектирования, обеспечивают прочность и долговечность конструкции стоек при эксплуатации в условиях атмосферных воздействий температуры и влажности. Крышка V, подкрышник IV, потолок III, гнездовой I и донный VI корпуса выполнены в виде отдельных модулей кругового поперечного сечения, последовательно торцами установленными друг на друга. Крышка V выполнена в виде плоского сплошного диска с радиальными каналами со стороны подкрышника IV (радиальные каналы на фигурах не показаны). Подкрышник IV и гнездовой корпус I выполнены в виде цилиндрических труб. Сотовые рамки II размещены на ложементе VII, при этом между нижними торцами сотовых ... 2182765 Имитатор звуков рыб ... из нержавеющей стали. PD4A - Изменение наименования обладателя патента СССР или патента Российской Федерации на изобретение (73) Новое наименование патентообладателя: Федеральное государственное образовательное учреждение высшего профессионального образования В«Дальневосточный государственный технический рыбохозяйственный университетВ» (RU) Адрес для переписки: 690950, г. Владивосток, ул. Луговая, д.52-Б, ФГОУ ВПО В«ДАЛЬРЫБВТУЗВ» Извещение опубликовано: 20.10.2008 БИ: 29/2008 QB4A Регистрация лицензионного договора на использование изобретения Лицензиар(ы): Федеральное государственное образовательное учреждение высшего ... |
Еще из этого раздела: 2307495 Пневматический высевающий аппарат 2142696 Способ выращивания цветочных и декоративных растений в тепличных и домашних условиях 2490869 Способ направленного изменения циркуляции воздушных масс и связанных с ней погодных условий 2277321 Колосоподъемник для косилочных систем уборочных машин 2148319 Растительное средство для борьбы с пресноводными моллюсками 2245013 Устройство для обмолота легкоповрежденных культур на примере нута (варианты) 2239968 Способ предпосевной обработки семян овощных культур 2153256 Инсектицидное средство и способ борьбы с вредителями сельскохозяйственных культур 2175177 Агромост с оснасткой для прокладки и уплотнения постоянных грунтовых колей 2020793 Способ выращивания растений и стаканчик для его осуществления |
Изобретения в сельском хозяйстве
Обработка почвы в сельском и лесном хозяйствах
Посадка, посев, удобрение
Уборка урожая, жатва
Обработка и хранение продуктов полеводства и садоводства
Садоводство, разведение овощей, цветов, риса, фруктов, винограда, лесное хозяйство
Новые виды растений или способы их выращивания
Производство молочных продуктов
Животноводство, разведение и содержание птицы, рыбы, насекомых, рыбоводство, рыболовство
Поимка, отлов или отпугивание животных
Консервирование туш животных, или растений или их частей
Биоцидная, репеллентная, аттрактантная или регулирующая рост растений активность химических соединений или препаратов
Хлебопекарные печи, машины и прочее оборудование для хлебопечения
Машины или оборудование для приготовления или обработки теста
Обработка муки или теста для выпечки, способы выпечки, мучные изделия
|
|
||